
–
Mise à jour le 23/02/2018 : Nous rentrons maintenant dans une phase de processus d’amélioration de notre robot Maya. Nous nous sommes donnés comme cahier des charges pour les modifications, que celles-ci devaient dans le maximum des cas être compatible avec l’étude initiale afin de minimiser l’impression de nouvelles pièces. Si l’on veut upgrader pour augmenter les performances il y aura quand même quelques impressions à réaliser, mais elles seront compatibles au maximum des cas avec les pièces déjà existantes.

.
Sommaire :
- 25/04/2018 : Upgrade de l’avant bras et de la motorisation du coude version Pro-001
- 10/05/2018 : Upgrade de la mâchoire de Maya servomoteur d’élévation
- 25/10/2018 : Modification de la fixation du servomoteur sur l’avant-bras de Maya
- 10/11/2018 : Upgrade du servomoteur d’élévation du bras.
- 17/02/2019 : Modification de câblage du servomoteur du bras.
- 22/02/2019 : Modification de la deuxieme partie de l’épaule.
- Retour au menu principal.
.
Retour au sommaire
25/04/2018 : Upgrade de l’avant bras et de la motorisation du coude version Pro-001 |
Nous avons redessiné une nouvelle trappe de visite pour l’avant-bras du robot Maya, pourquoi ce changement ? nous nous sommes aperçus lors de l’impression 3D que la partie rectangulaire est beaucoup plus difficile à démouler. Nous avons donc pris la décision de changer la forme de la trappe et nous avons opté pour une ellipse ce qui entraîne moins de supports pour sa réalisation lors de l’impression 3D. Il va sans dire que le résultat brut d’impression est nettement mieux fini. De plus, le rendu visuel final se marie nettement mieux avec les courbes de l’avant-bras de Maya. Mais vous trouverez sur notre site les deux versions de trappe et d’avant-bras.
Nous avons aussi effectué une modification dans le coude.Nous avons changé le servomoteur de transmission. Nous sommes donc passés d’un servomoteur développant un couple de 24 kg.cm par un servomoteur D845WP de chez Hitec possédant un couple de 50 kg.cm sous une tension de 7.4V. En choisissant ce type de servomoteur, cela nous a permis d’éviter la modification sur la partie support

Servomoteur Hitec D845WP
Caractéristiques techniques du servomoteur D845WP
- Longueur ; 66 mm
- Largeur : 32 mm
- Hauteur : 62 mm
- Poids : 227 g
- Couple de commande sous 7.4V : 50 kg.cm
Cette dernière modification et là pour augmenter les performances de l’avant-bras de Maya. L’utilisateur pourra choisir quel type de servomoteur qui lui convient le mieux par rapport à son application.

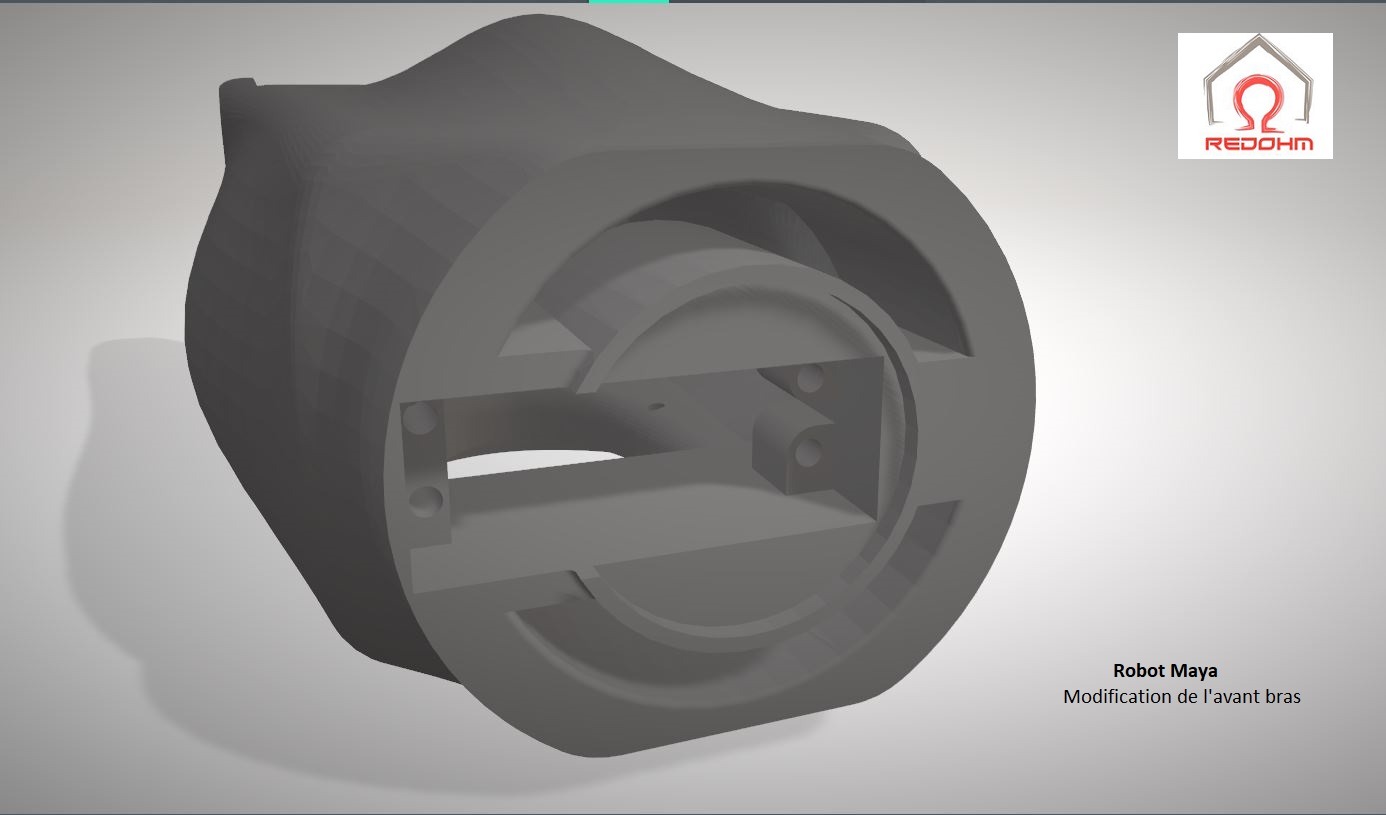
Avant bras avec trappe de visite

Avant bras avec sa trappe de visite
–
Retour au sommaire
10/05/2018 : Upgrade de la mâchoire de Maya servomoteur d’élévation |
Dans le souci d’améliorer notre robot Maya, nous avons opéré une modification sur le moteur d’élévation de la tête de Maya. Cette modification a pour but d’augmenter la durabilité du matériel sur le long terme, il va de soi que si vous utilisez notre robot à des fins ludiques ou pédagogiques cette modification n’est absolument pas nécessaire. Nous avons opté de changer le servo 805BB par un servomoteur Hitec D845 WP .La particularité de ce matériel est de pouvoir développer un couple deux fois plus élevé que le 805 BB soit 50 kg.cm sous une tension d’alimentation de 7.4 V. Vous apercevrez que pour obtenir le couple maximal, il faudra modifier le câblage électrique pour récupérer la tension d’alimentation nominale. Vous trouverez dans l’article le schéma électrique modifié pour que vous puissiez exécuter cette amélioration ( folio-Pro-100 )
–
Vue de la mâchoire du robot Maya
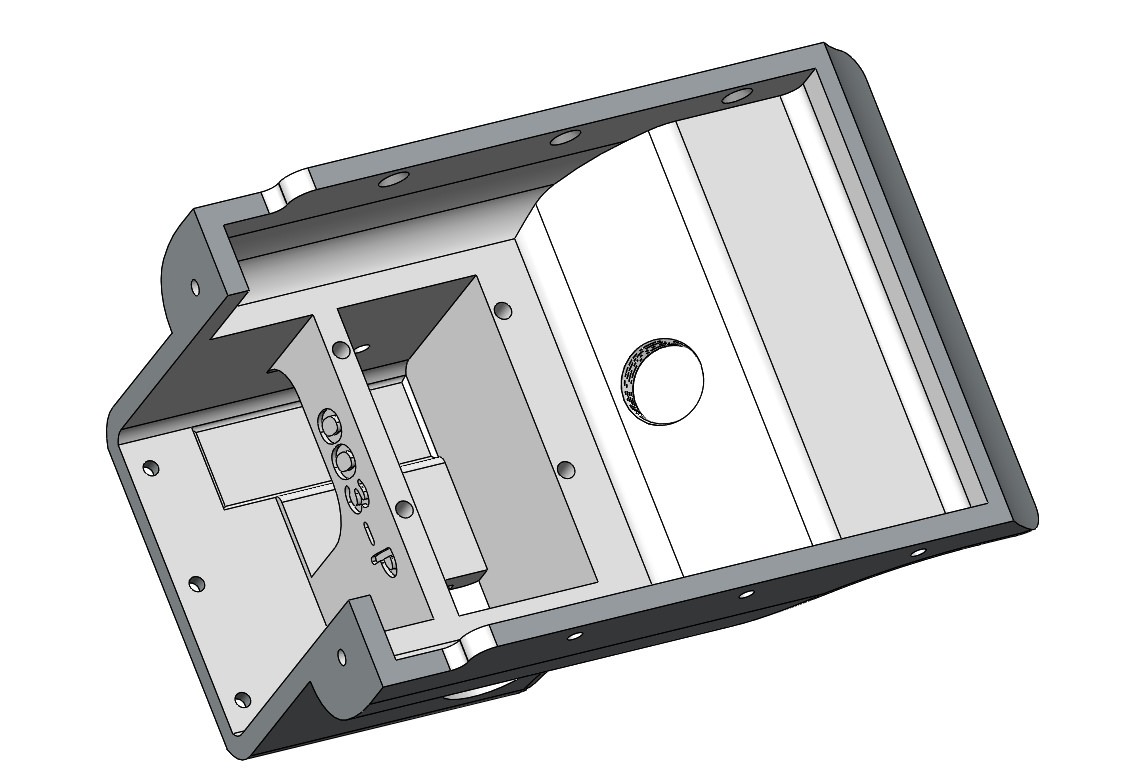
Robot Maya : Modification de la mâchoire en version Pro – RedOhm –
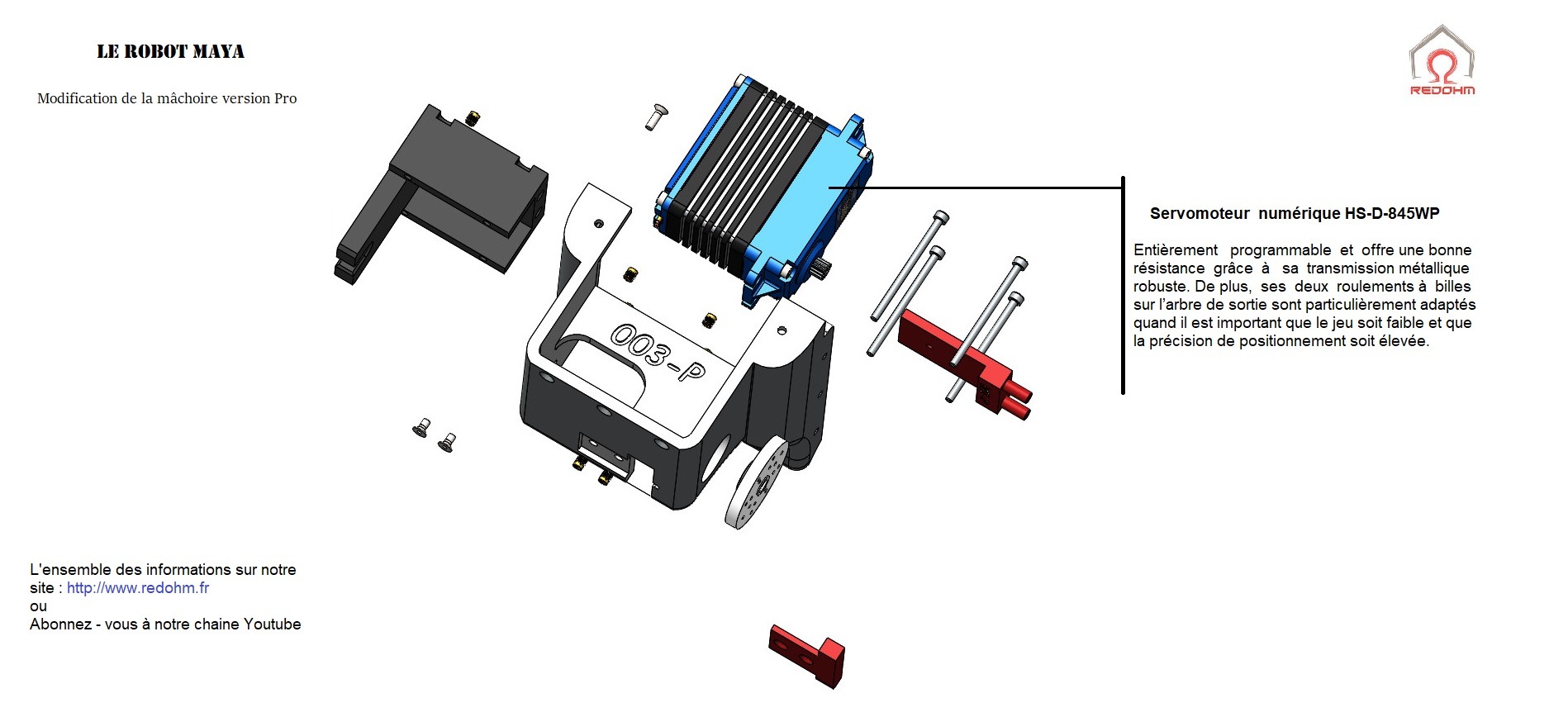
Le robot Maya éclatée de la mâchoire Version Pro – RedOhm –
–
Schéma electrique modifié
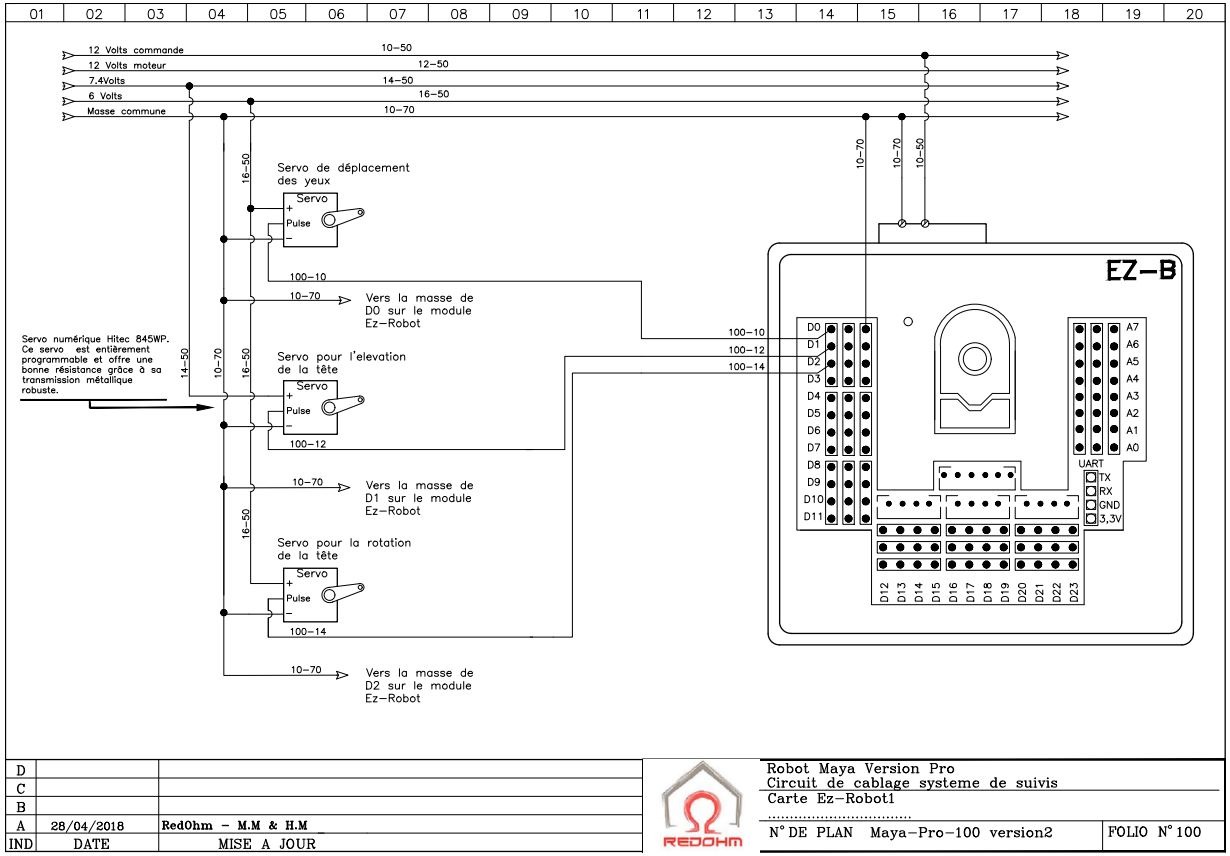
Schéma électrique folio 100 version Pro – RedOhm –
.
25/10/2018 : Modification de la fixation du servomoteur sur l’avant-bras de Maya |
Après de nombreuses heures de fonctionnement des bras de Maya , nous nous sommes aperçus d’une faiblesse sur la partie fixation du servomoteur au niveau de la rotation poignée. Les inserts posés dans les trous prévus à cet effet finissaient avec les vibrations à ce désolidariser de leur support. Nous avons donc revu notre copie en modifiant la partie fixation servomoteur. Vous trouverez donc ces modifications pour la pièce 125 et 145 qui passeront un indice 125–A pour le bras gauche et un indice 145–A pour la partie droite.
Robot Maya : Modification de l’avant-Bras du robot – RedOhm –
.
10/11/2018 : Upgrade du servomoteur d’élévation du bras. |
.
Depuis un certain temps , nous testons notre robot Maya dans des conditions extrêmes. Comme vous avez pu déjà le lire dans un grand nombre de publications ,vous vous êtes aperçus que nous avons développé une version pro.Celle-ci est une version endurcie de notre robot .Nous avons donc opéré une modification au niveau du bras.Nous sommes montés en puissance au niveau des servomoteurs d’élévation, nous sommes passés de 100 kg centimètres à 400 kg centimètres. Le premier servomoteur dans la version standard est alimenté en 7.4 V, dans la version pro le servomoteur est alimenté en 12 V. Ce système possède une puissance quatre fois supérieure à celle de la version standard.
.
Maya modification de l’epaule pour élevation
.
Maya modification de l’epaule elevation et présentation du servomoteur
17/02/2019 : Modification de câblage du servomoteur d’élévation du bras. |
.
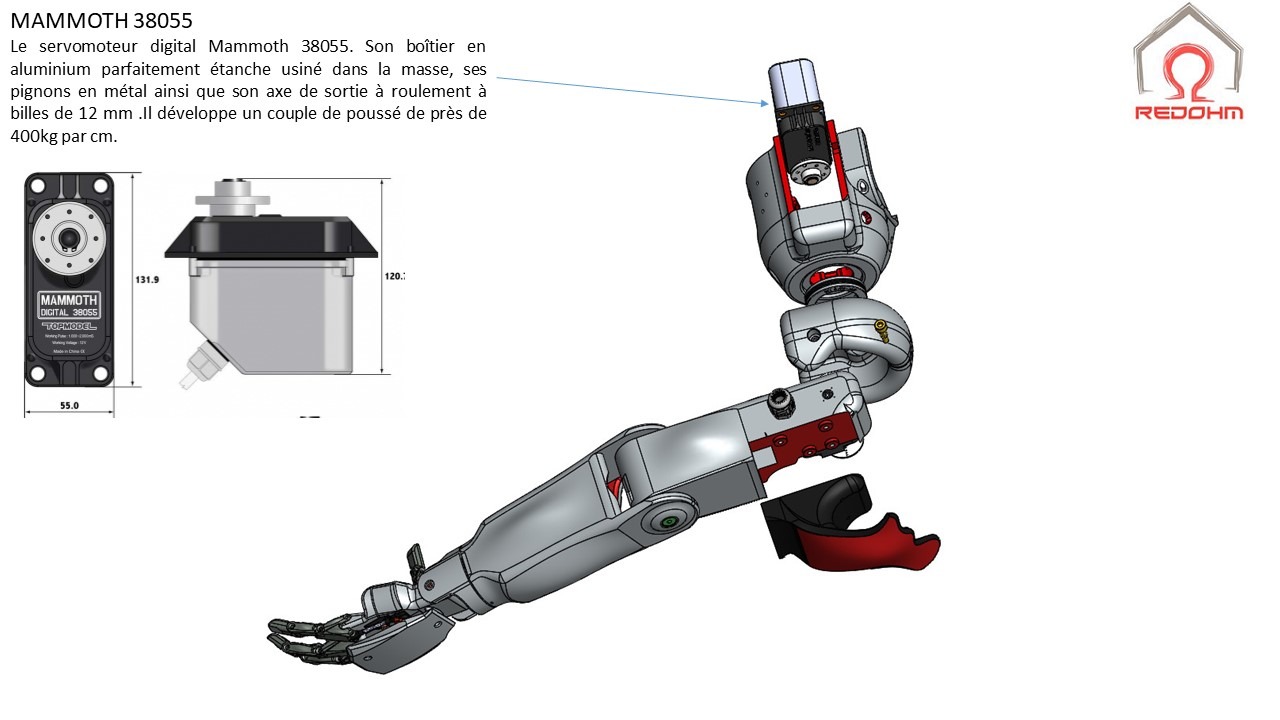
La modification mécanique avec insertion du moteur MAMMOTH 38055 de 400kg/cm de chez Topmodel .Celle-ci nous oblige à revoir le câblage de cette partie. La première chose consiste à installer un régulateur 5 V sur la prise de tension du module de chez EZ robot afin de sécuriser l’alimentation de la partie électronique du servomoteur. Nous avons aussi modifié la tension d’alimentation de la partie puissance du servomoteur de 7.4 V à 12 V , afin de bénéficier du couple maximal de ce matériel. Il est à noter qu’il faut prendre grand soin des interconnexions des fils de masse, toutes les alimentations doivent être liées sur une masse commune
.

Modification de câblage de Maya
.
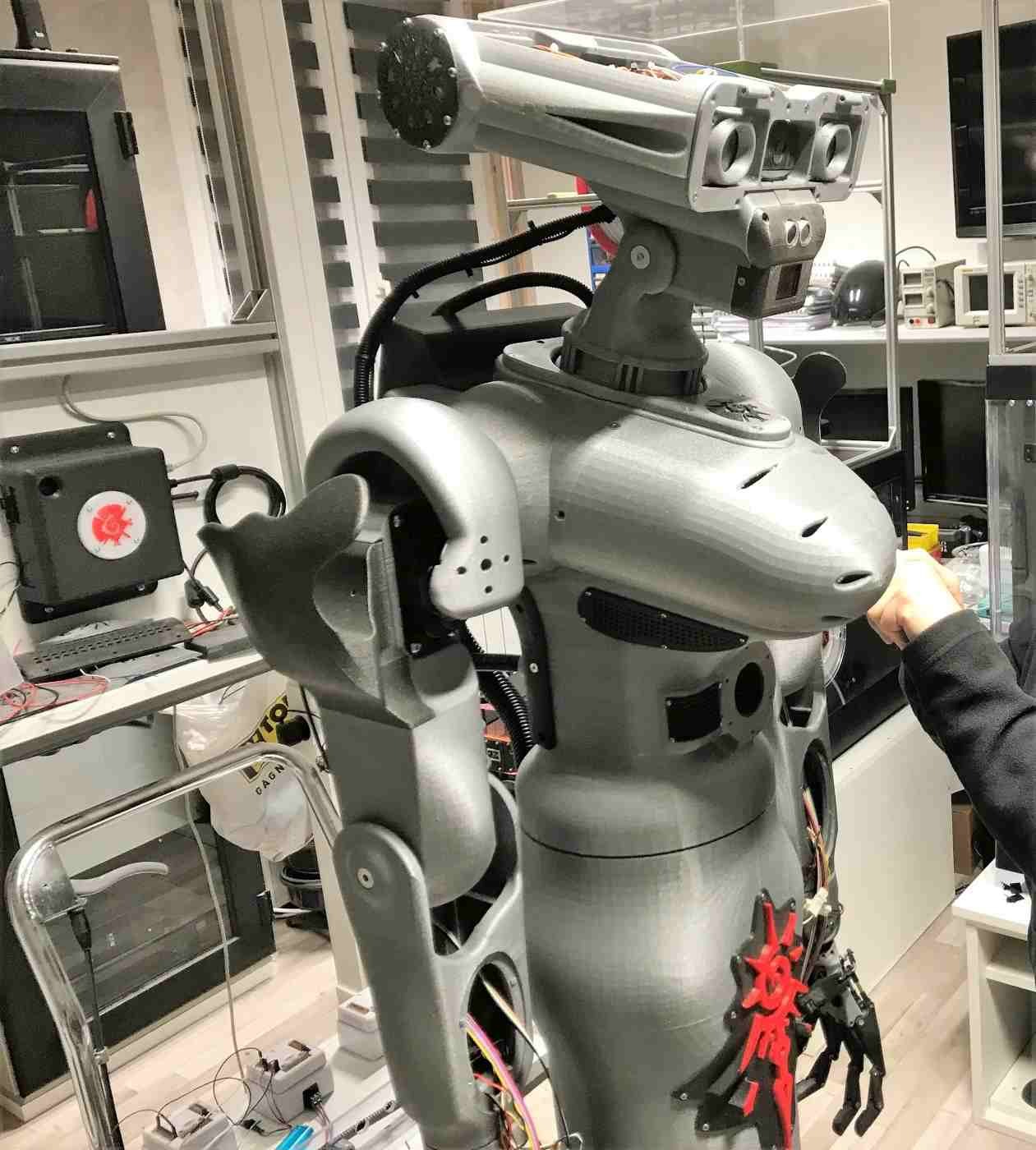
Maya
.
Retour au sommaire
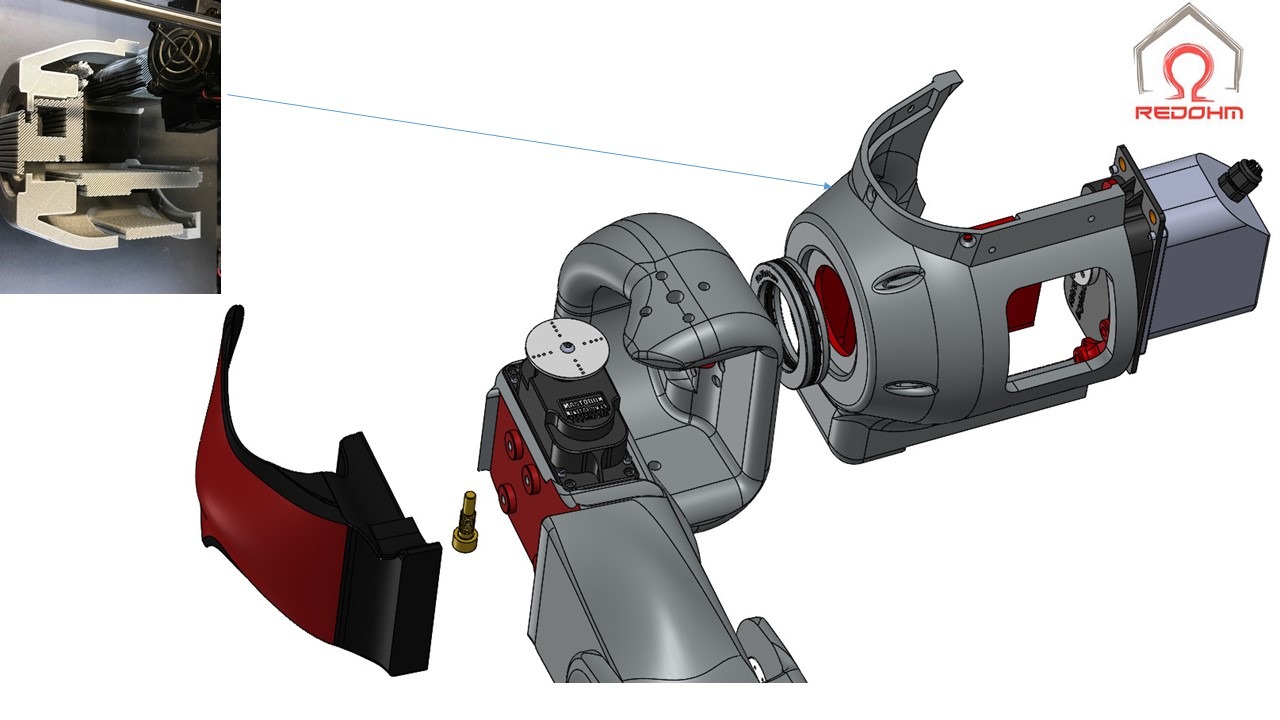
22/02/2019 : Modification de la deuxieme partie de l’épaule. |
.
Toujours dans l’optique d’augmenter la puissance de notre robot Maya, nous avons réalisé l’inclusion d’un nouveau servomoteur du type MAMMOTH 38055 de 400kg/cm de chez Topmodel sur la rotation supérieure du bras. Cette modification est utile que si vous opérez l’amélioration de l’élévation avec le même type de servomoteur.
Rappel : La version standard du robot Maya est toujours d’actualité, et restera toujours suivi par RedOhm. Cette version est surtout destinée pour créer un robot d’accompagnement. Alors que la version pro est quant à elle prévue pour être utilisée pour manipuler des charges n’excédant pas 4 kg et bien entendu possédant des qualités relationnelles.

Maya modification de la rotation bras -00
.
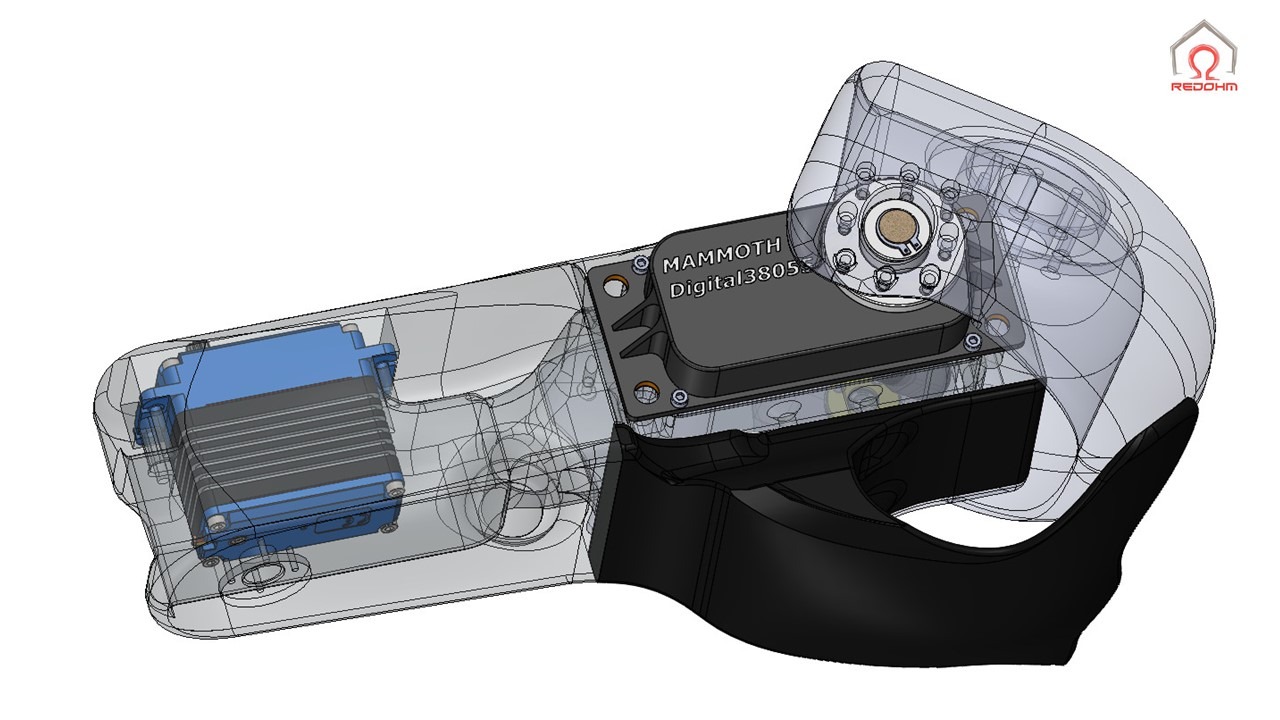
Modification de la rotation du bras de Maya 001
.
Retour au sommaire