
Projet châssis LL-1.01 Version 23/10/2014
Mise à jour le 12/12/2017 : Retrouvez sur cette page L’ensemble des informations concernant le chassis LL-1.01 . Propulsion du châssis par 4 roues motrices indépendantes. Charge utile 70 KG – Vitesse 6km/h

Sommaire :
- Description technique du chassis
- Moteur de propulsion .
- Caracteristique des roues
- Variateur
- Nos vidéos sur le chassis LL
- Retour au menu principal nos chassis .
![]()
Description technique du chassis |
.
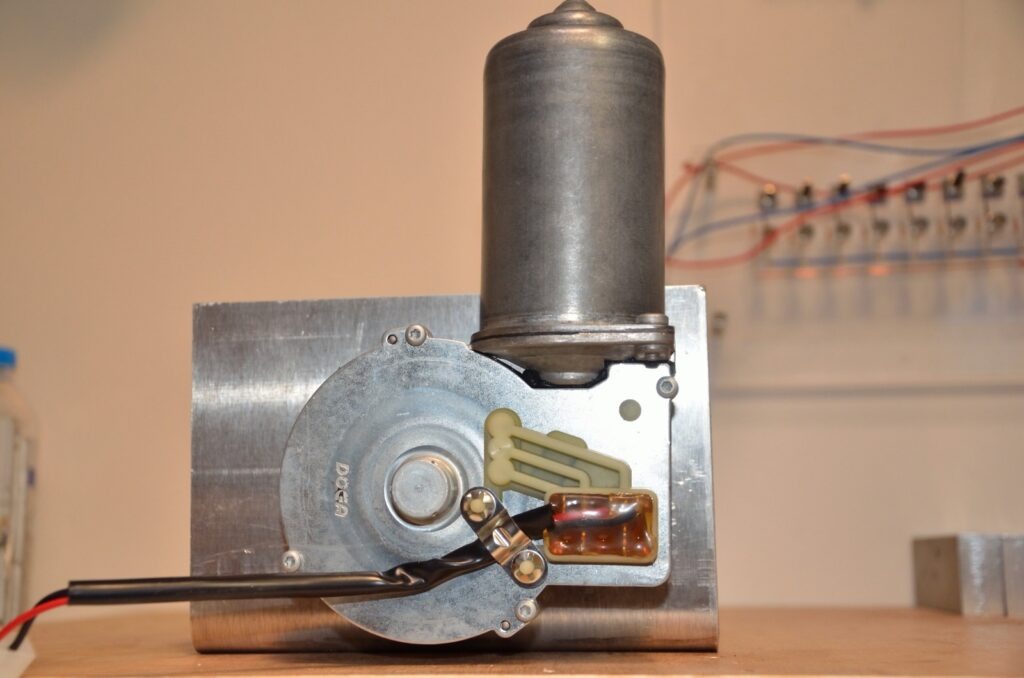
Description des moteurs de propulsion :
.
- Gammes : Motoréducteurs
- Technologies : Courant Continu (DC)
- Tension d’alimentation : 12 V
- Courant nominal : 6 A
- Rapport de réduction : 81
- Couple nominal : 8 Nm
- Vitesse en charge : 45 tr/mn
- Fabricant : Doga
Description des roues :
Roue pneumatique, bandage en Caoutchouc, Capacité de 200kg, Diam. 380mm x 90mm. Durée de vie de pneu jusqu’à 4 fois celle d’une roue pneumatique. Structure de pneu à cellules fermées n’absorbant pas d’eau, ne gelant pas ou ne craquant pas. La dureté au rebondissement offre une absorption des chocs et les propriétés de roulement d’une roue pneumatique. Moyeu de roue en polypropylène ; pneu en caoutchouc

Description des variateurs :

2 Variateurs électronique de type SaberTooth
La carte SaberTooth 2 x 60 . Elle convient pour des poids de 450 kg (55 kg pour des robots de combat). La commande des deux moteurs CC à balais peut se faire à l’aide d’une tension analogique, d’un signal RC ou d’un signal série
Tension d’entrée : 6-30V nominal, 33.6V max absolue.
Courant de sortie : Jusqu’à 60A en continu par canal. Les charges de pointe peuvent être jusqu’à 120A par canaux pendant quelques secondes. 5V BEC de commutation: Jusqu’à 1A pics continus et 1.5A sur toute la gamme de l’entrée tensions
Les options mixtes et indépendants :
La carte dispose de mode mixte spécialement conçu pour les robots , où deux moteurs fournissent à la fois la direction et la propulsion.
Synchrone Régénération :
Cela peut conduire à des améliorations spectaculaires en temps d’exécution pour les systèmes qui arrêtent souvent . Ce système d’entraînement permet également d’économiser en retournant l’énergie inductive stockée dans les enroulements du moteur à la batterie a chaque cycle de commutation , au lieu de la perdre sous forme de chaleur dans les enroulements du moteur
.
![]()
Nos vidéos sur le chassis LL |
.
.
Retour au sommaire.