
Mise à jour le 22/09/2020 . Dans cet article, vous trouverez un ensemble de tutoriels sur Arduino sous forme de texte , de vidéo . Vous trouverez aussi bien les articles qui traiteront des entrées sorties tor mais aussi des articles beaucoup plus techniques avec le matériel Xbee etc.
Tutoriel pour Arduino
Sommaire :
- Les entrées sorties Tor sur Arduino .
- Les entrées analogiques.
- Leds et affichage.
- Afficheur Grove OLE42178P
- Capteur de distance Laser type Lidar
- Moteur pas à pas
- Utilisation des cartes SD
- Communication I2C
- Communication Ethernet.
- Communication sans fil ( protocole IEEE 802.15.4. ) Xbee
- Utilisation des modules GPS.
- Exploiter les données de l’Arduino depuis une application PC
- Les librairies Arduino.
- Pour tout probléme
- Retour à la page principale.
![]()
Les entrées sorties Tor sur Arduino . |
- Le tuto vidéo regroupant les 3 articles ci-dessous
- Comment déclarer des entrées sorties .
- Utilisation de la fonction booléenne et avec 2 boutons poussoirs
- Utilisation de la fonction booléenne ou avec 2 boutons poussoirs.
- Tutoriel sur la déclaration d’un bouton et de 2 relais et utilisation en mode clignoteur sur 2 sorties.
- Codage de la fonction télerupteur sur Arduino
.
Retour en haut de page![]()
Les entrées analogiques. |
Un signal analogique est un signal variant sans interruption dans le temps.Les signaux analogiques sont traités et mémorisés par un circuit spécial appelé convertisseur analogique / numérique ( ou bien convertisseur A/D ).Attention si vous délivrez une tension supérieure à 5V ,le microcontrôleur risque être détruire ou hors service au niveau de cette entrée .Le convertisseur de l’Arduino possède une résolution de 10 BITS
L’instruction analogRead( numéro de pin ) permet de lire la valeur d’un signal présent sur une entrée analogique
-
Utilisation d’un potentiomètre lecture de sa valeur et utilisation de celle-ci pour le réglage de Luminosité d’un Led.
.
![]()
Leds et affichage |
- Programme sur le fonctionnement des Led RGB de type Grove
- Module circulaire MR4131D
- Principe de fonctionnement de la bibliothèque pour le module MR4131D
- Programme constructeur pour le module circulaire à leds de chez Microbot MR4131D.
.
Retour en haut de page![]()
Afficheur Grove OLE42178P |
Module graphique Oled 96 x 96 points à 16 niveaux de gris compatible Grove présentant une haute luminosité .Ce module se raccorde sur un port I2C du Grove Base Shield ou du Mega Shield.
- Positionnement d’un message ( un texte ) puis on efface l’écran
- Visualisation l’état de 4 entrées sur un afficheur
- Récupération de 2 valeurs analogique et afficher ces valeurs
- Réglage du niveau de gris ou par potentiomètre ou par cellule photo
.
Retour en haut de page![]()
Capteur de distance Laser type Lidar |
Son fonctionnement est le même que celui du radar, la différence étant le domaine spectral dans lequel il travaille et le type de faisceau utilisé : alors que le radar fonctionne dans le domaine des ondes radio, le lidar couvre en particulier le domaine du visible, et également les domaines ultraviolet (UV) et infrarouge (IR), d’autre part, le lidar utilise un faisceau laser, tandis que le radar utilise un faisceau électromagnétique classique, non polarisé.
- Différents laser Lidar pour information
- Télémètre laser SF02/F pour Arduino
- Laser LIDAR-Lite 2.
- Capteur de distance LIDAR-Lite V3 documentation constructeur
- A voir l’article sur la construction d’une tourelle pour laser lidar
Retour en haut de page
![]()
Pilotage des moteurs pas à pas |
Ce type de moteur est très courant dans tous les dispositifs où l’on souhaite faire du contrôle de vitesse ou de position en boucle ouverte, typiquement dans les systèmes de positionnement et d’indexation.
L’usage le plus connu du grand public est dans les imprimantes classiques et imprimantes 3D, les scanner et les platines vinyle de DJ. Mais ils sont présents dans de nombreuses applications telles : les photocopieurs, imprimantes bancaires, robotique, instrumentation, pompes à perfusion, pousse-seringues, système de positionnement sur machine industrielle et machine-outil.
- Carte uStepper S Carte de commande de moteurs pas-à-pas Nema 17 permettant le suivi de la position absolue de l’arbre du moteur
- En cours de réalisation
.
Retour en haut de page![]()
Communication I2C |
.
Le bus I2C ( Inter Integrated Circuit ) a été dévellopé au début des années 80 par Philips semiconductors pour permettre de relier facilement à un microprocesseur les différents circuits d’un téléviseur moderne.
Le bus I2C permet de faire communiquer entre eux des composants électroniques très divers grace à seulement trois fils : Un signal de donnée ( SDA ), un signal d’horloge ( SCL ), et un signal de référence électrique ( Masse ).
Ceci permet de réaliser des équipements ayants des fonctionnalités très puissantes ( En apportant toute la puissance des systèmes microprogrammés ) et conservant un circuit imprimé très simple, par rapport un schéma classique ( 8bits de données, 16 bits d’adresse + les bits de contrôle ).
- communication I2c 1 maitre 2 esclaves
.
Retour en haut de page![]()
Communication Ethernet |
- Pilotage d’un NAS Synology Surveillance Station avec un module Yokis via une carte Ethernet Shield.
.
Retour en haut de page![]()
Communication sans fil ( protocole IEEE 802.15.4. ) |
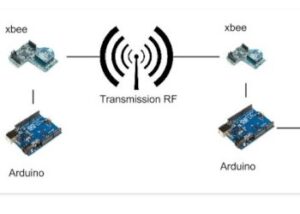
- Pour pouvoir communiquer des informations par radio fréquence entre deux Arduino, il faudra utiliser un module comme le Xbee.
- Piloter un arduino à distance depuis un PC.Nous allons voir comment envoyer des ordres depuis un pc vers un arduino
- .
![]()
Utilisation des modules GPS. |
.
Les récepteurs GPS autonomes à destination des amateurs de programmation ou d’électronique , non rien à envier à leurs homologues pour l’automobiles.Ils permettent de réaliser du positionnement ou de la navigation avec une précision aussi fiable que les produits construits pour le parc automobile .
- Le module Grove SEN10752P est un module pour Arduino permettant de recevoir des trames GPS aux normes NMEA.
.
Retour en haut de page![]()
Exploiter les données de l’Arduino depuis une application PC |
.
- Nous verrons dans cet article comment nous pouvons récupérer les données GPS provenant de l’Arduino dans une application Windows que nous allons développer sous visual studio et ainsi afficher notre position.
- Dans cet article, nous allons envoyer des données depuis le pc vers l’Arduino. Le principe est tout simple : lorsqu’on va déplacer la glissière (trackbar) sur l’application PC, on va modifier l’éclairage de la LED connectée à l’Arduino.
- Dans cet article, nous allons voir comment créer un petit programme PC permettant de récupérer très simplement la valeur d’un potentiomètre connecté à l’Arduino. Au niveau connectique et matériel .
.
Retour en haut de page![]()
Les librairies Arduino |
.
Librairies par fonctions
Détail des fonctions des librairies Arduino
- Grove LCD_Display( référence Grove OLE42178P mise à jour le 19/09/2019)
- Classe GSMServer . (mise à jour le 19/09/2019)
- Serveur est la classe de base pour tous les appels basés sur le serveur GPRS. Il n’est pas appelé directement, mais invoqué chaque fois que vous utilisez une fonction qui en dépend..
- LiquidCrystal (mise à jour le 19/09/2019)
- Cette bibliothèque permet à une carte Arduino de contrôler les écrans LiquidCrystal ( LCD ) basés sur le chipset Hitachi HD44780 (ou compatible), présent sur la plupart des LCD à texte . La bibliothèque fonctionne en mode 4 ou 8 bits (c.-à-d. En utilisant 4 ou 8 lignes de données en plus des lignes rs, enable et, éventuellement, des lignes de commande rw).
- SD (mise à jour le 19/09/2019)
- La bibliothèque SD permet de lire et d’écrire sur des cartes SD, par exemple sur le bouclier Ethernet Arduino. Il est construit sur sdfatlib par William Greiman. La bibliothèque prend en charge les systèmes de fichiers FAT16 et FAT32 sur les cartes SD et SDHC standard. Il utilise des noms courts 8.3 pour les fichiers. Les noms de fichiers transmis aux fonctions de la bibliothèque SD peuvent inclure des chemins séparés par des barres obliques, /, par exemple « répertoire / nom du fichier.txt ». Comme le répertoire de travail est toujours la racine de la carte SD, un nom fait référence au même fichier, qu’il comporte ou non une barre oblique (par exemple, « /file.txt » est équivalent à « file.txt »). Depuis la version 1.0, la bibliothèque prend en charge l’ouverture de plusieurs fichiers.
La communication entre le microcontrôleur et la carte SD utilise SPI , qui a lieu sur les broches numériques 11, 12 et 13 (sur la plupart des cartes Arduino) ou 50, 51 et 52 (Arduino Mega). De plus, une autre broche doit être utilisée pour sélectionner la carte SD. Il peut s’agir de la broche SS matérielle – la broche 10 (sur la plupart des cartes Arduino) ou de la broche 53 (sur le Mega) – ou d’une autre broche spécifiée dans l’appel à SD.begin (). Notez que même si vous n’utilisez pas la broche SS du matériel, vous devez la laisser comme sortie, sinon la bibliothèque SD ne fonctionnera pas.
- La bibliothèque SD permet de lire et d’écrire sur des cartes SD, par exemple sur le bouclier Ethernet Arduino. Il est construit sur sdfatlib par William Greiman. La bibliothèque prend en charge les systèmes de fichiers FAT16 et FAT32 sur les cartes SD et SDHC standard. Il utilise des noms courts 8.3 pour les fichiers. Les noms de fichiers transmis aux fonctions de la bibliothèque SD peuvent inclure des chemins séparés par des barres obliques, /, par exemple « répertoire / nom du fichier.txt ». Comme le répertoire de travail est toujours la racine de la carte SD, un nom fait référence au même fichier, qu’il comporte ou non une barre oblique (par exemple, « /file.txt » est équivalent à « file.txt »). Depuis la version 1.0, la bibliothèque prend en charge l’ouverture de plusieurs fichiers.
.
- Servo (mise à jour le 19/09/2019)
- Stepper (mise à jour le 19/09/2019)
- Cette bibliothèque vous permet de contrôler les moteurs pas à pas unipolaires ou bipolaires. Pour l’utiliser, vous aurez besoin d’un moteur pas à pas et du matériel approprié pour le contrôler.
- Communication série : SoftwareSerial ( communication série logiciel ) (mise à jour le 22/03/2015)
- Gestion du temps : Circuit DS1307 gestion de l’horloge en temps réel en cours
- Gestion des fichiers MP3 : Fonction spécifique pour le circuit VS1053b Sparkfun en cours
.
Retour en haut de page
Pour tout problème |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour en haut de page.