
***
Mise à jour le 30/03/2017
Les roues mecanum permettent à un véhicule de se diriger dans toutes les directions: aussi bien sur le côté que vers l’avant et l’arrière. Ces roues ont été inventées par le suédois Bengt Ilon en 1973, alors employé par la société Mecanum AB.
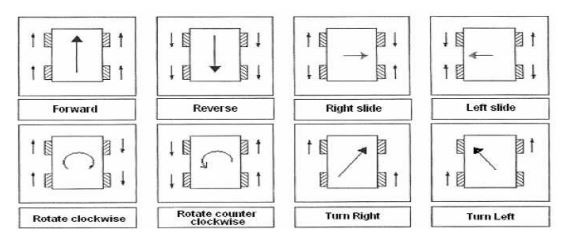
Les mouvements possibles sont:
- Translation vers l’avant/arrière (mouvement classique d’une roue), en faisant tourner toutes les roues ensemble dans le même sens,
- Mouvement de rotation pure, en faisant tourner les roues droites et gauches en sens opposé,
- Translation vers la droite/gauche, en faisant tourner la roue avant droite et la roue arrière gauche dans le sens opposé à la roue avant gauche et la roue arrière droite.
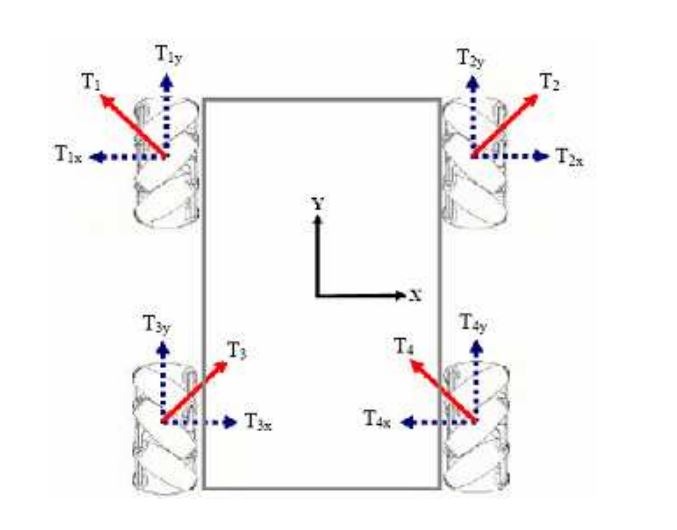
Principe de déplacement de la roue Mecanum
Principe de déplacement de la roue Mecanum – 01
Ces mouvements peuvent être combinés en étant réalisés simultanément.Voici quelques vidéos glanées sur le net :
RedOhm a choisi plusieurs types de roues pour ses prototypes les voici .
Kit de 4 Roues en Aluminium 152mm Mecanum : (2x Droite, 2x Gauche)
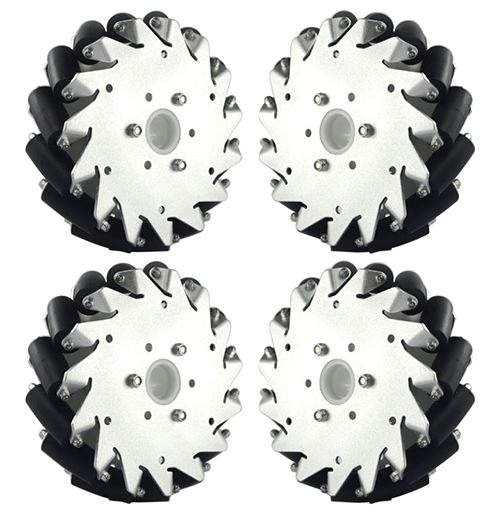
- Jeu de roues Mecanum en aluminium (2 x droite, 2 x gauche)
- Peuvent être connectées à un moteur indépendant et être entraînées de façon indépendante
- Les rouleaux ont un axe de rotation de 45°
- Capacité de charge par roue : 45 kg
Le Jeu de roues Mecanum en aluminium de 152 mm (2 x droite, 2 x gauche) comprend 4 pièces : 2 roues droites et 2 roues gauches. Une droite et une gauche peuvent être assemblées de chaque côté de votre robot. Chaque roue est reliée à son propre moteur indépendant et entraînée de façon indépendante. Chacune des quatre roues comprend une série de rouleaux fixés sur sa circonférence, ces rouleaux ont un axe de rotation de 45° par rapport au plan parallèle à l’axe de rotation de la roue. La roue Mecanum utilise une forme de châssis standard et chaque roue est entraînée par un moteur différent, ce qui la rend capable de se déplacer dans n’importe quelle direction. Il n’est pas besoin de changer de direction pour que les roues tournent. Cette conception permet à la roue de propulser votre robot en avant, en arrière et directement latéralement.
Dimensions :
- Diamètre : 152,4 mm (6 pouces)
- Largeur : 55,52 mm
- Longueur d’un rouleau : 38,1 mm
Ou les trouver : Robotshop
Kit Robot 4WD avec Roues Mecanum

- À base de roues Mecanum
- Chaque roue est entrainée individuellement
- Capacité de transfert omni-directionnel
- Capacité de charge élevée jusqu’à 10 Kg
Le Kit Robot 4WD avec Roues Mecanum est une plate-forme mobile à 4 roues motrices à base de roues Mecanum. Il comprend deux roues gauches Mecanum ainsi que deux roues droites. Les quatre roues Mecanum sont raccordées séparément aux moteurs et contrôlées individuellement. Selon la direction et la vitesse de chaque roue, la plate-forme mobile peut aller vers l’avant, l’arrière, de côté et dans toute autre direction ou rotation souhaitées. Grâce à ce kit, vous pouvez construire votre propre robot omni-directionnel.
Ou les trouver : Robotshop
![]()