Mise à jour le 27/12/2020 : Ce support de webcam peut être considéré comme un outil pour les passionnés de CAO et de DAO. Mais il peut être très utile pour faire de la photo macro ou bien d’autre utilisation.
Sommaire : En cours de realisation
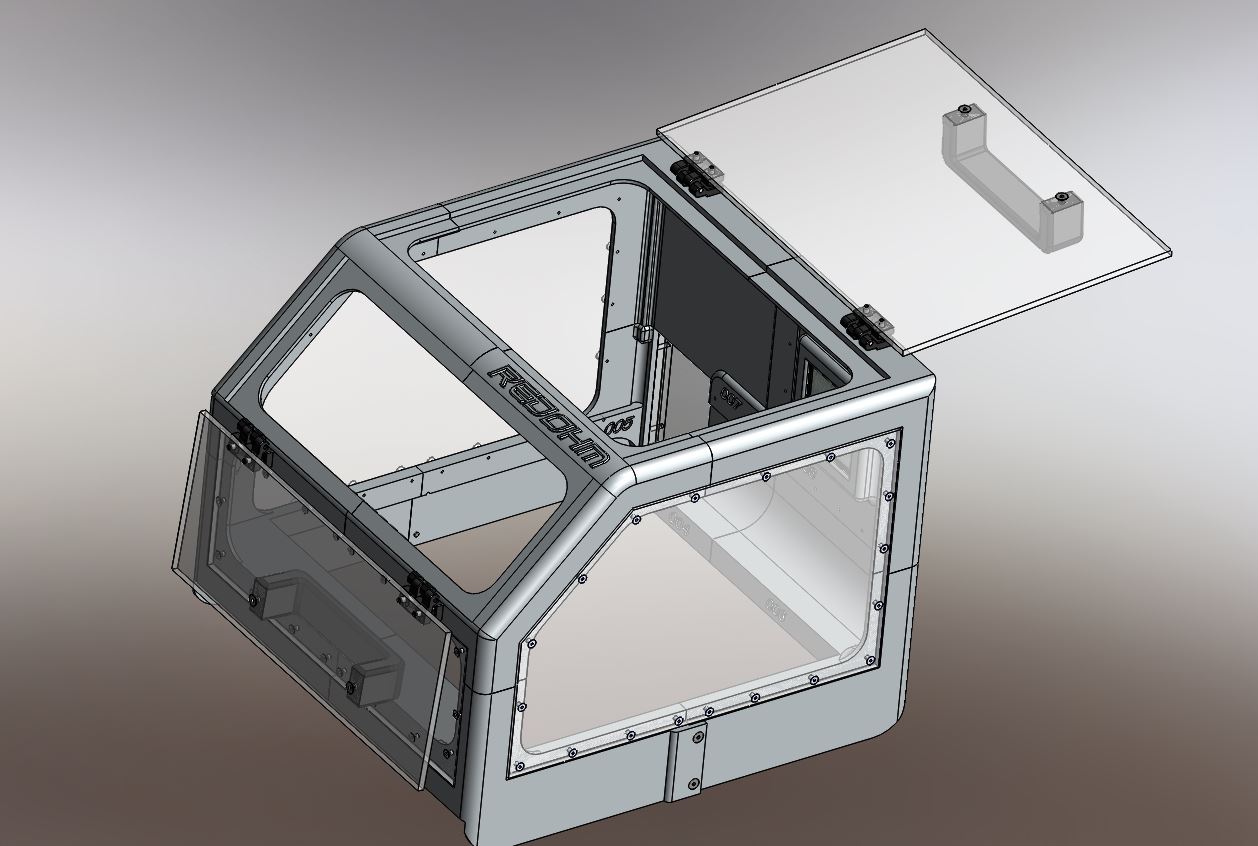
- 001 : Présentation
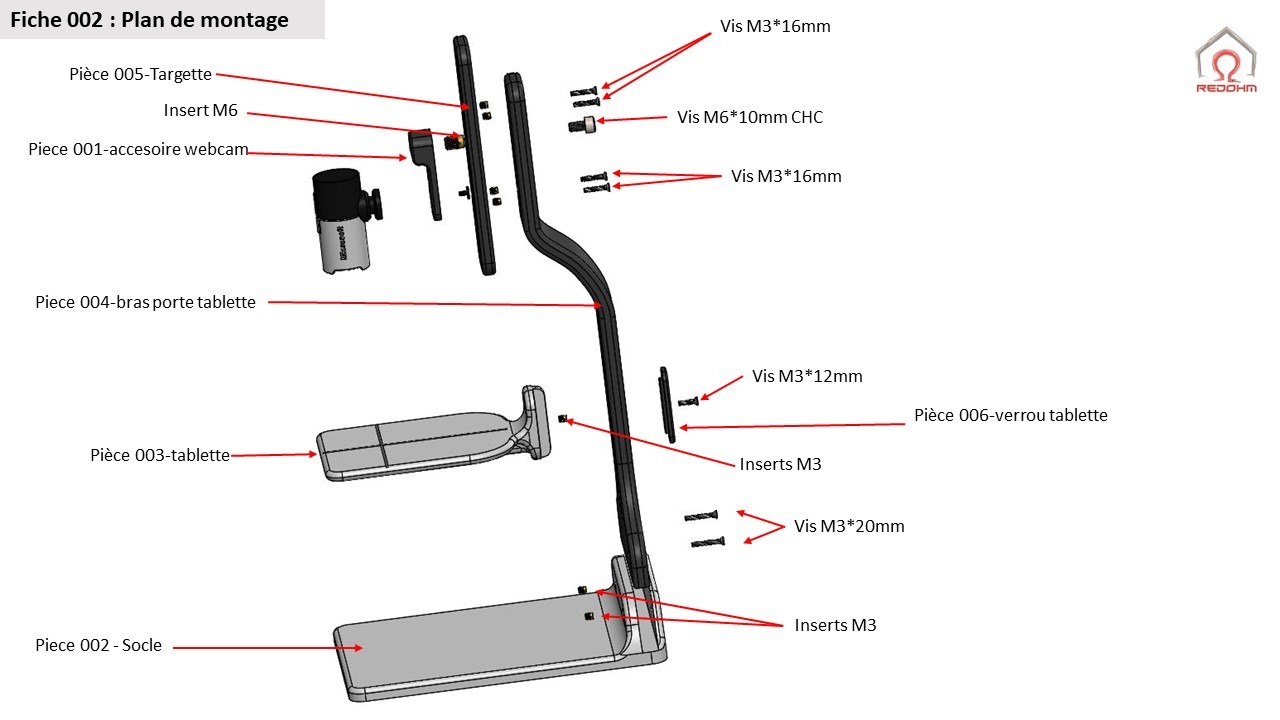
- 002 : Plan de montage
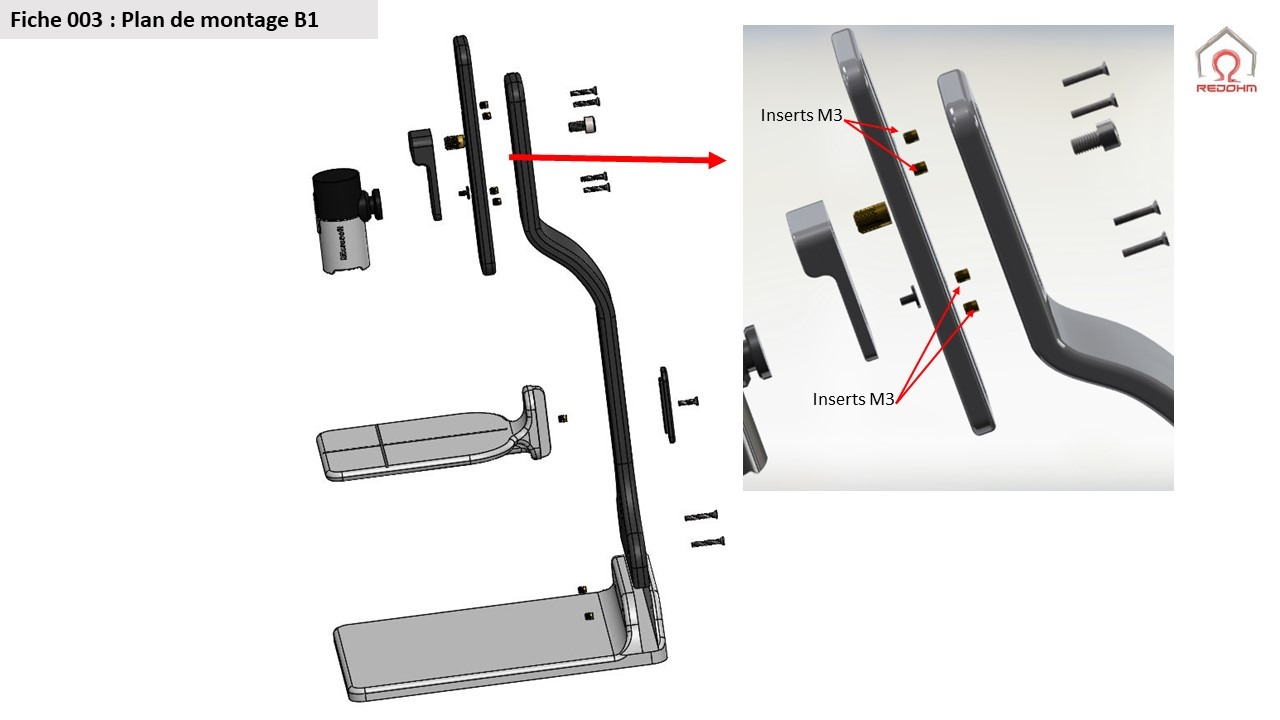
- 003 : Plan de montage B1
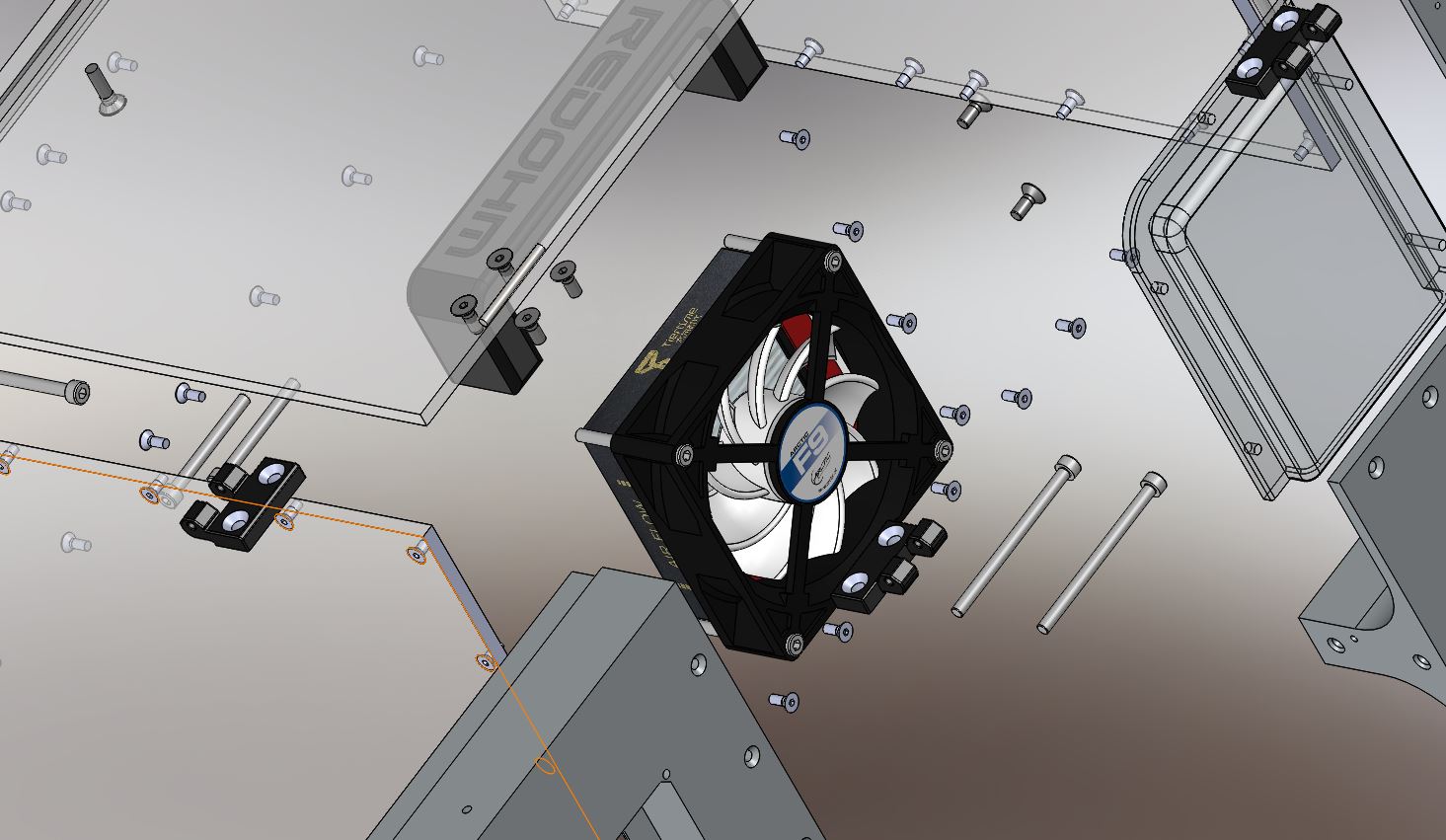
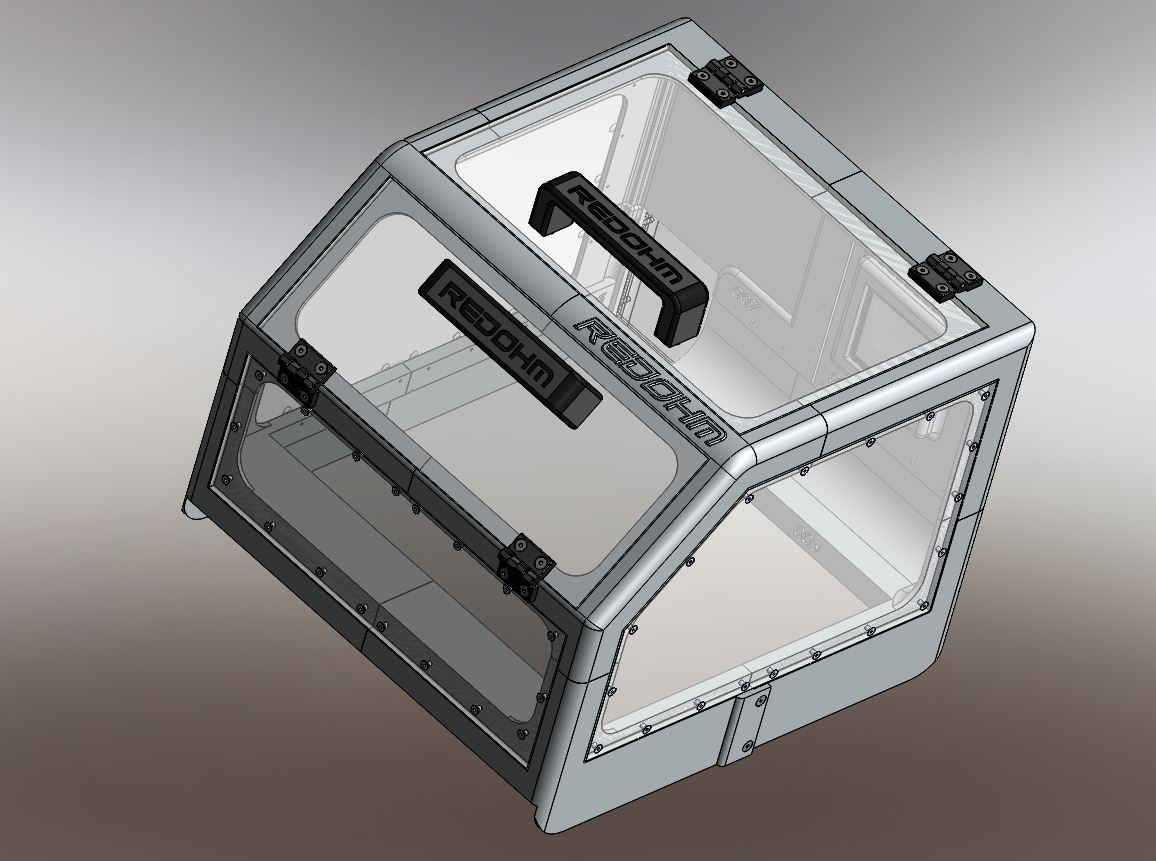
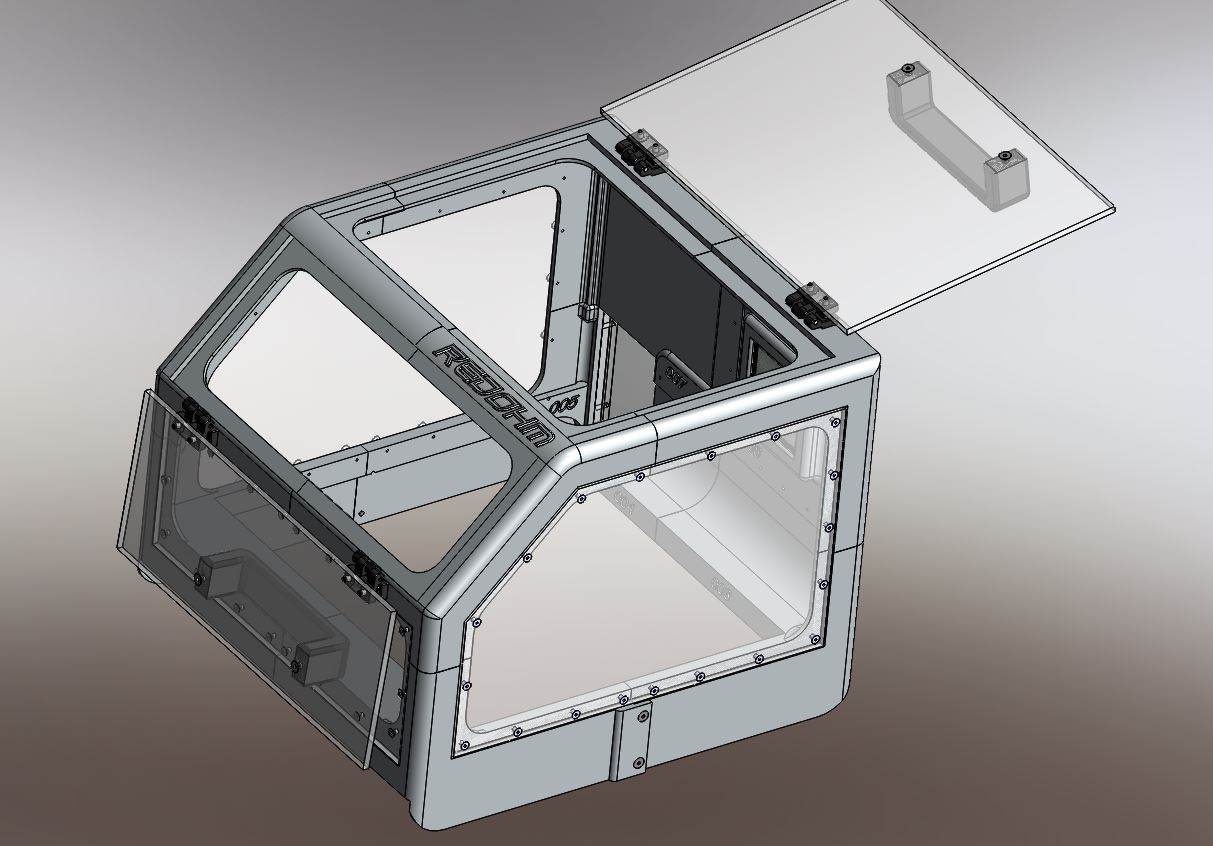
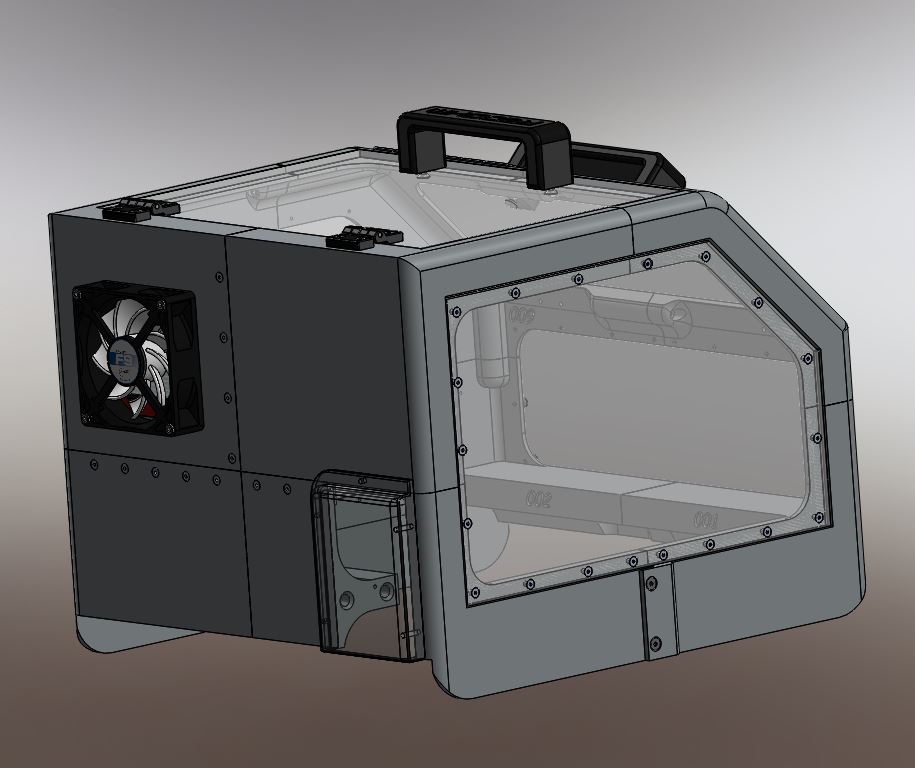
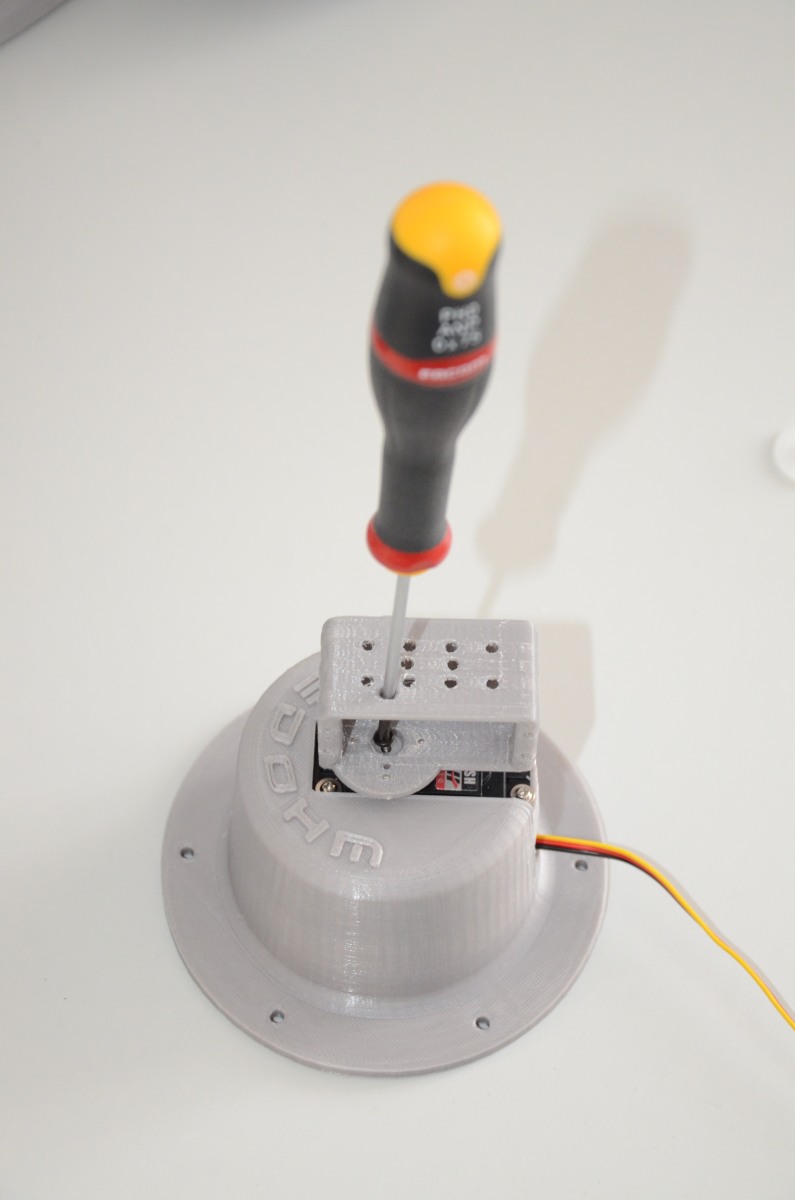
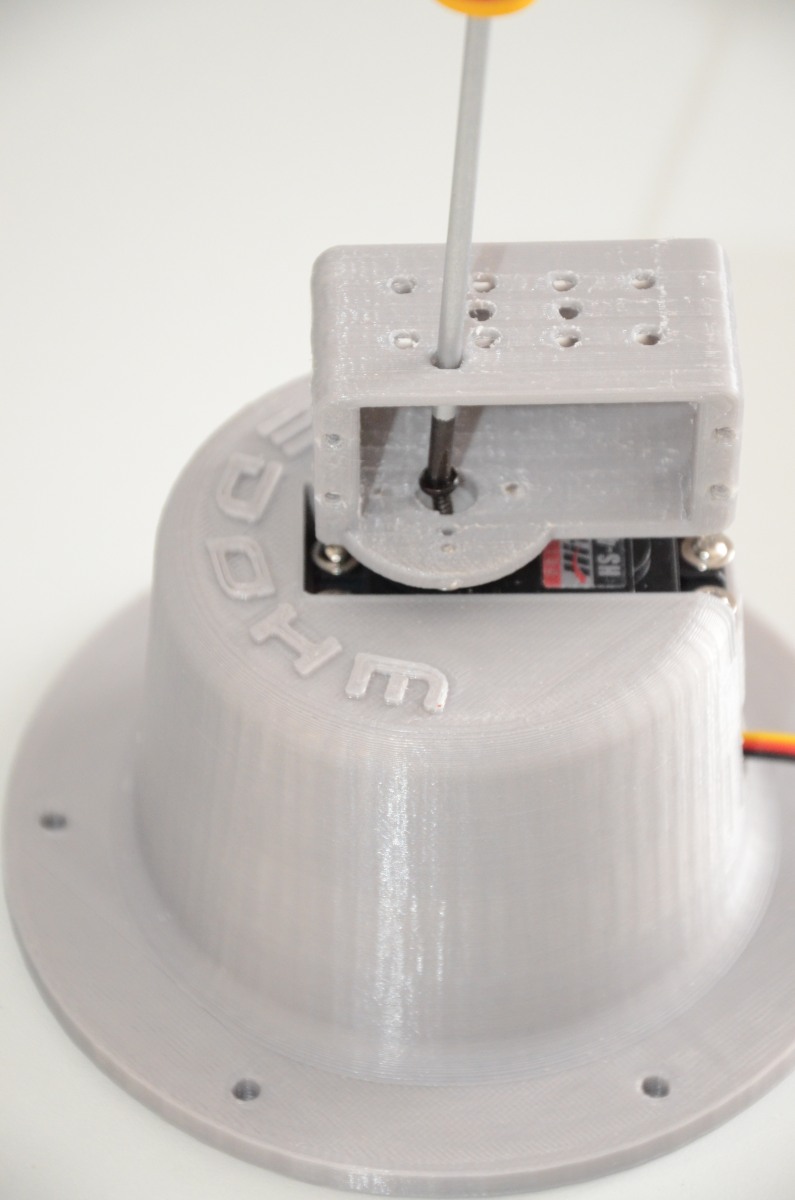
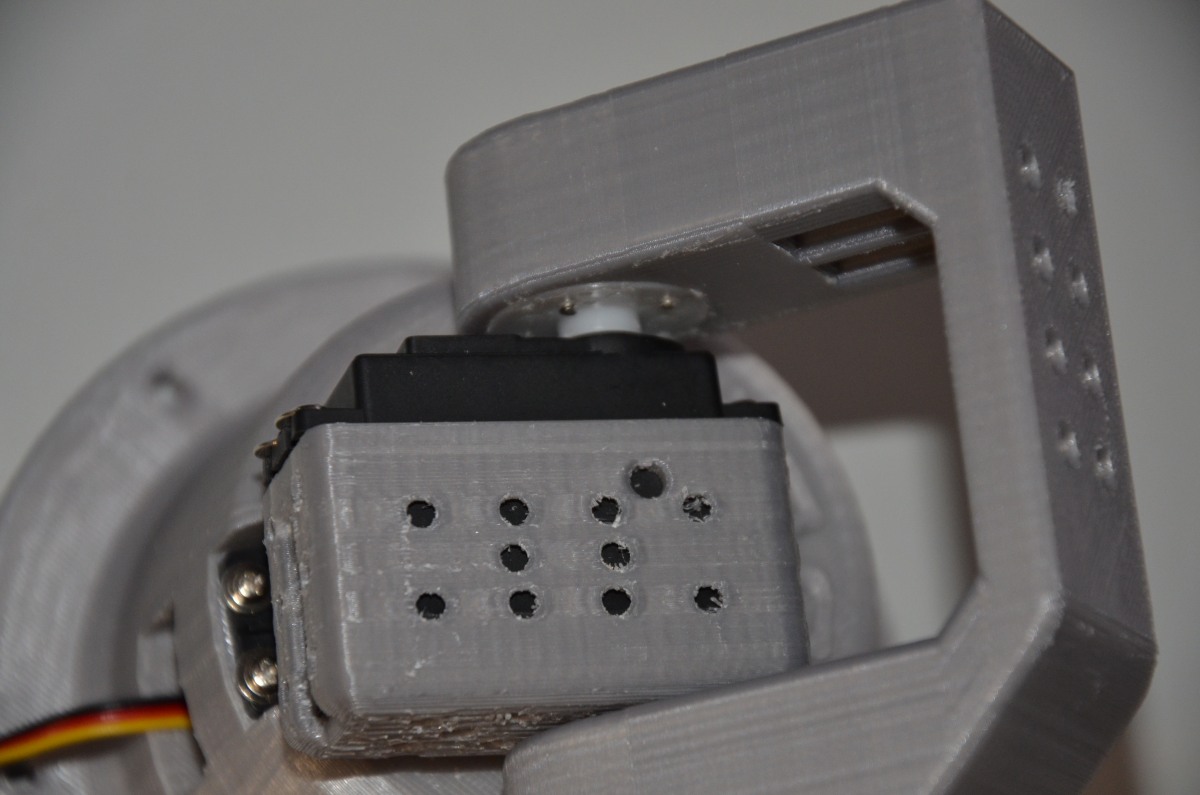
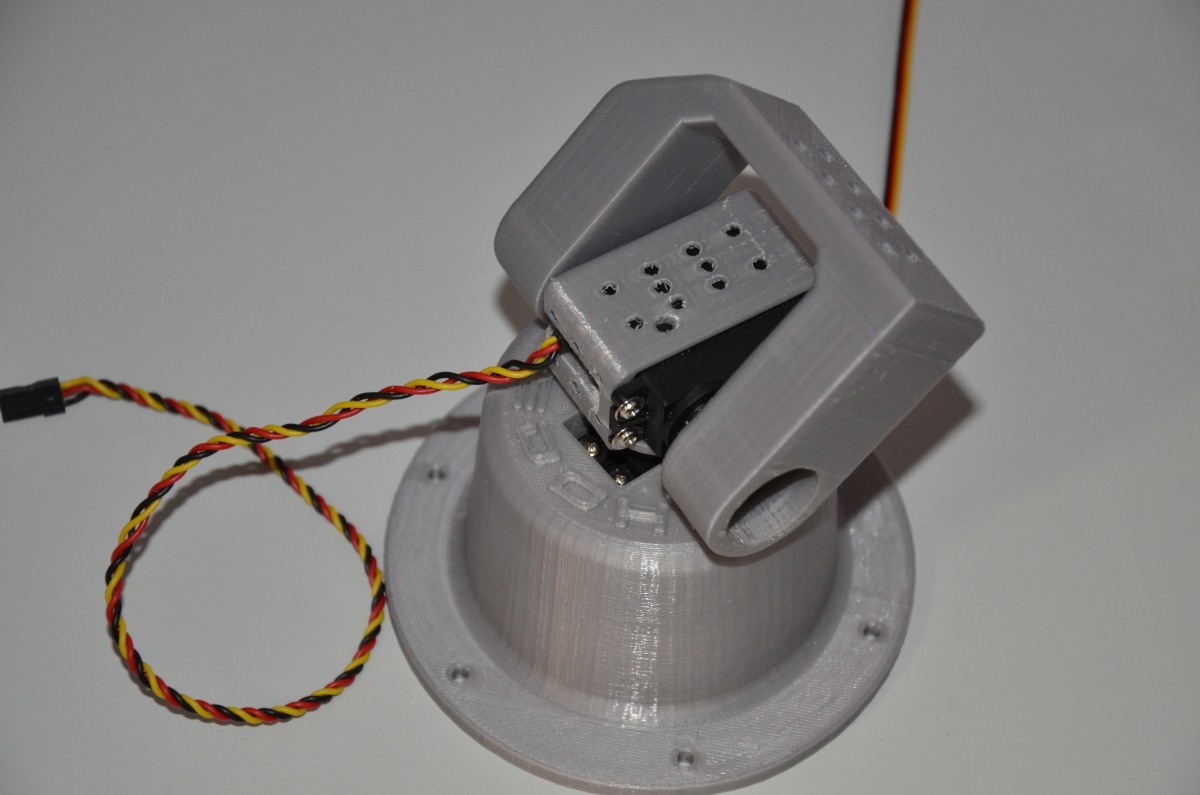
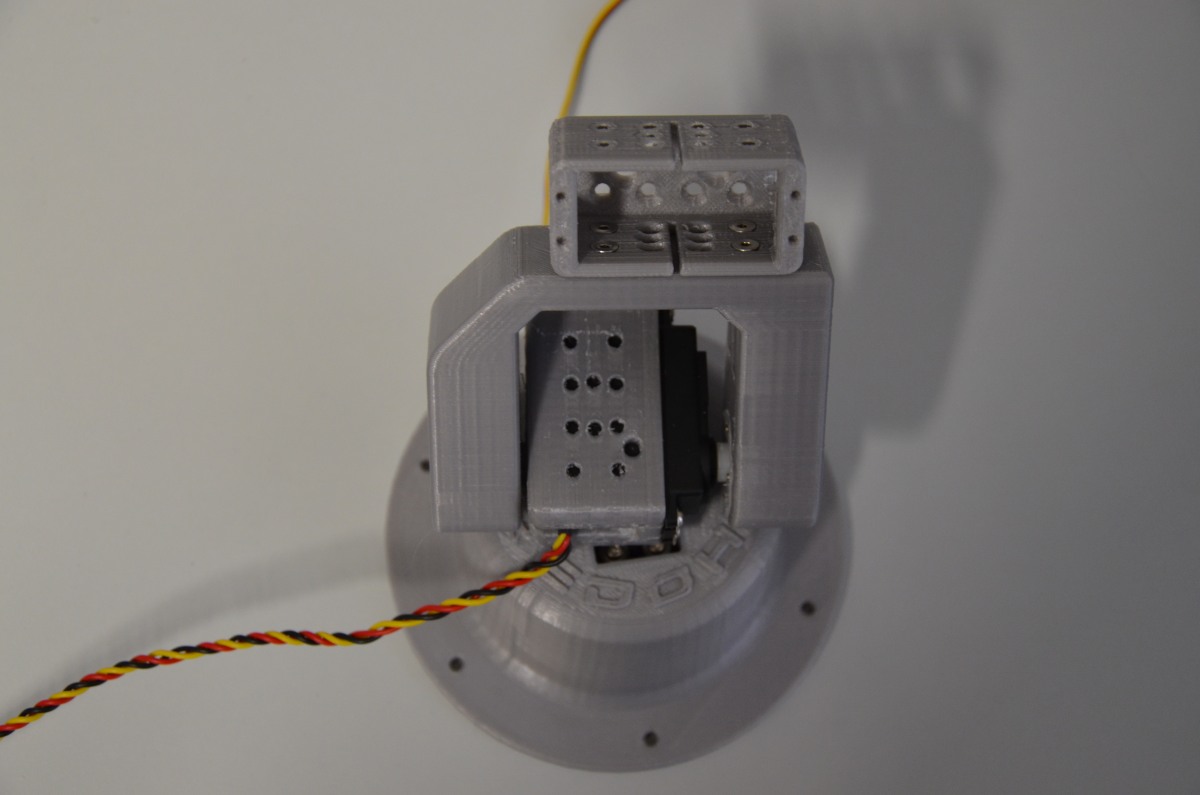
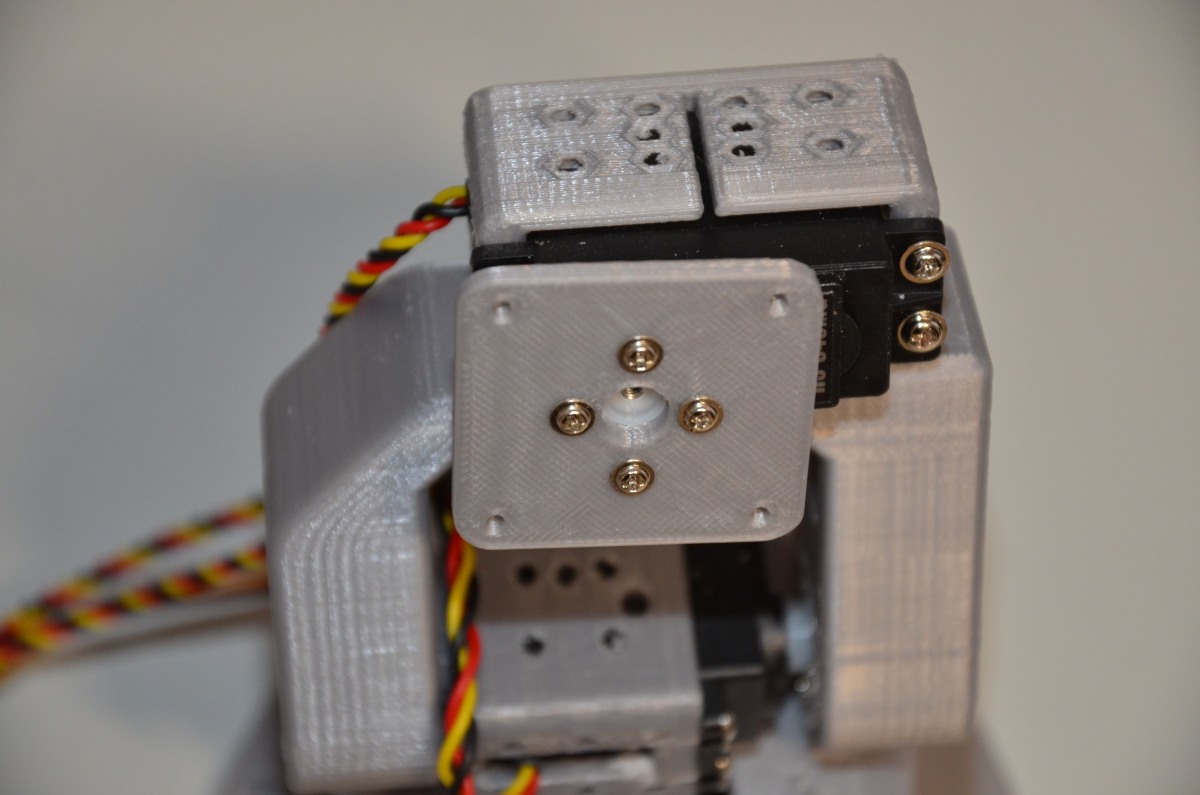
- 004 : Montage de l’ensemble
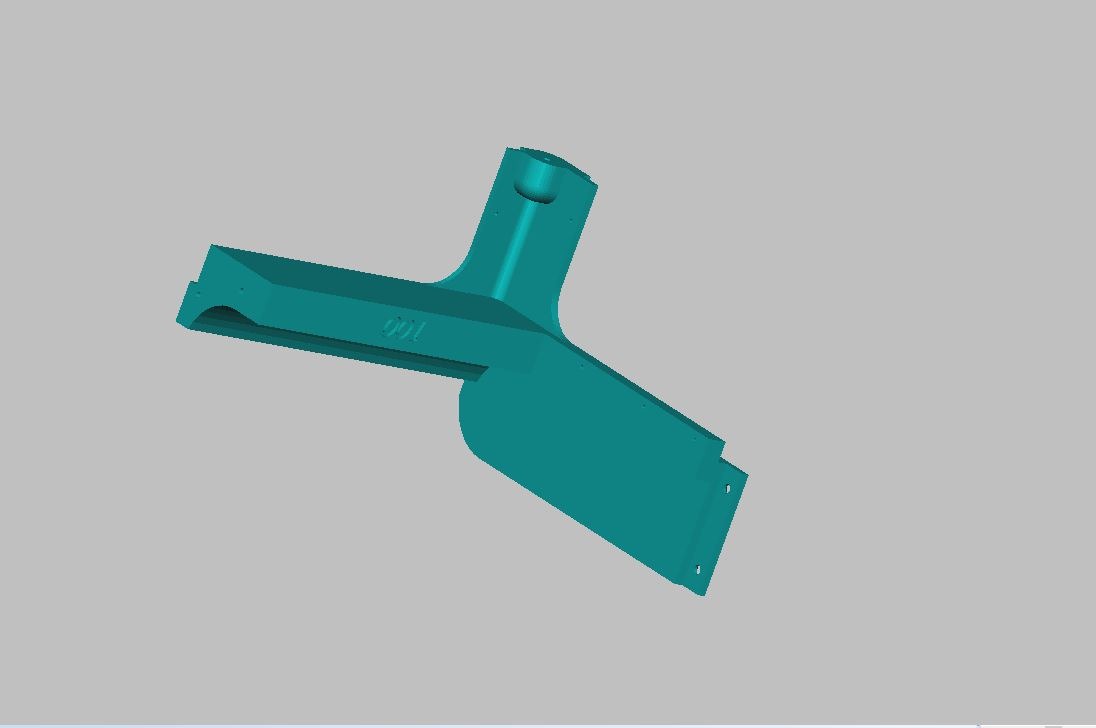
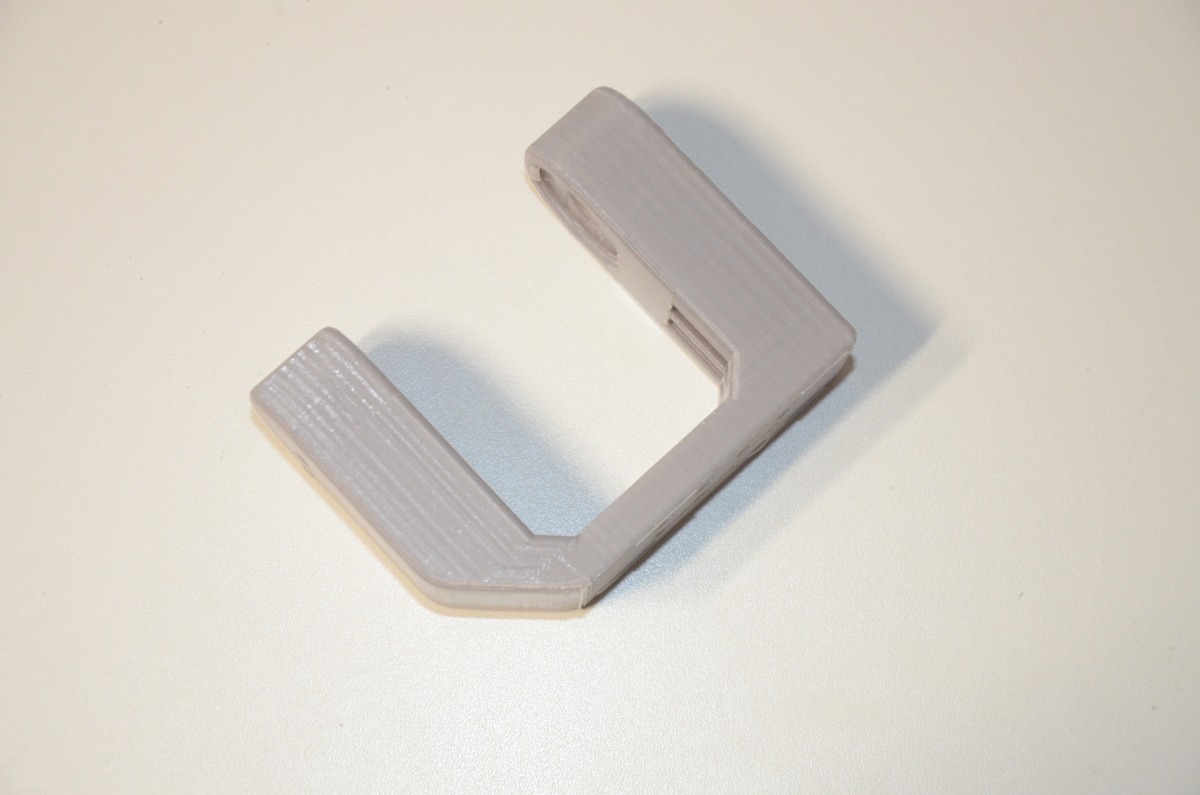
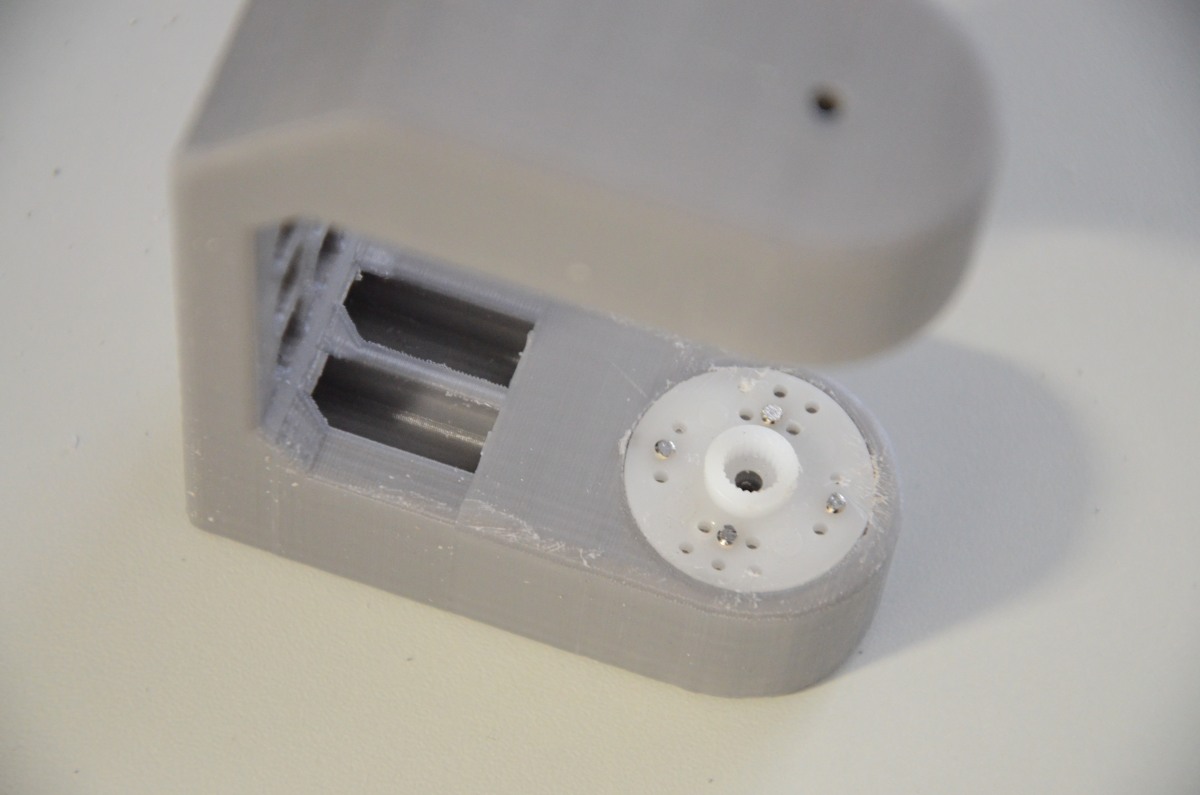
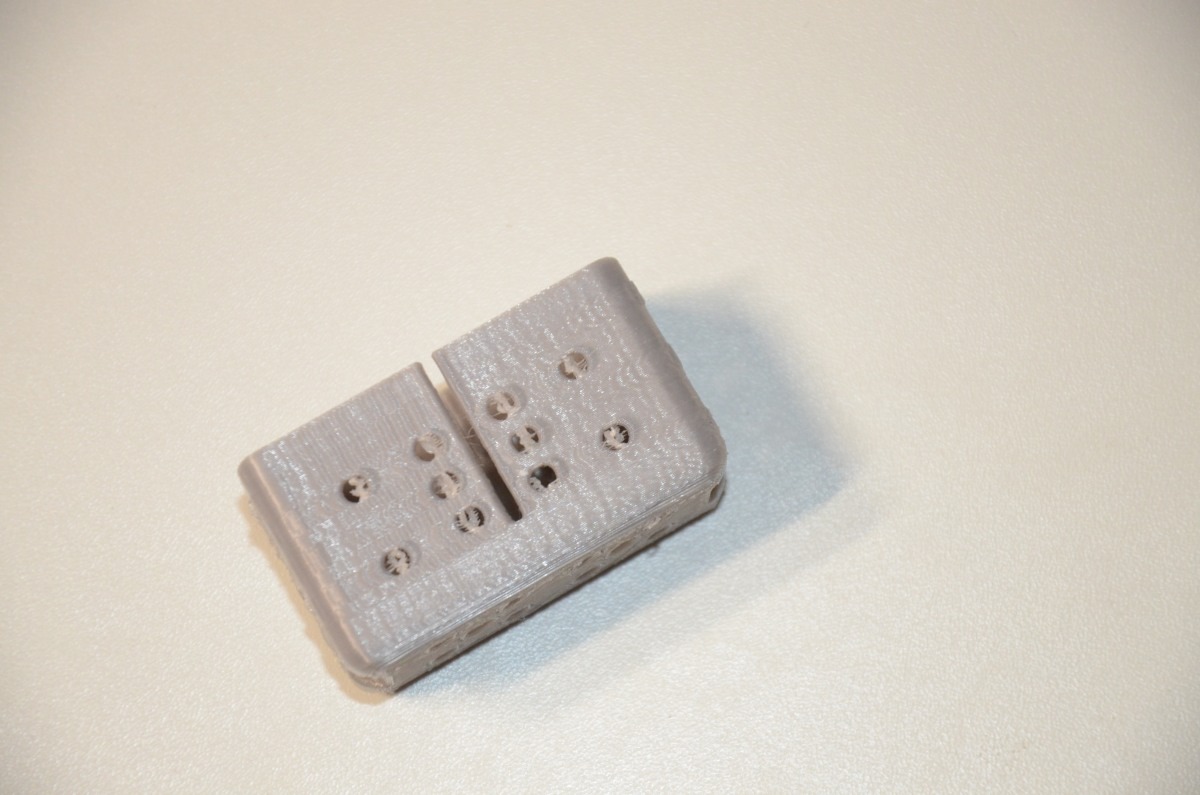
- 005 : Piece 001 – accessoire webcam
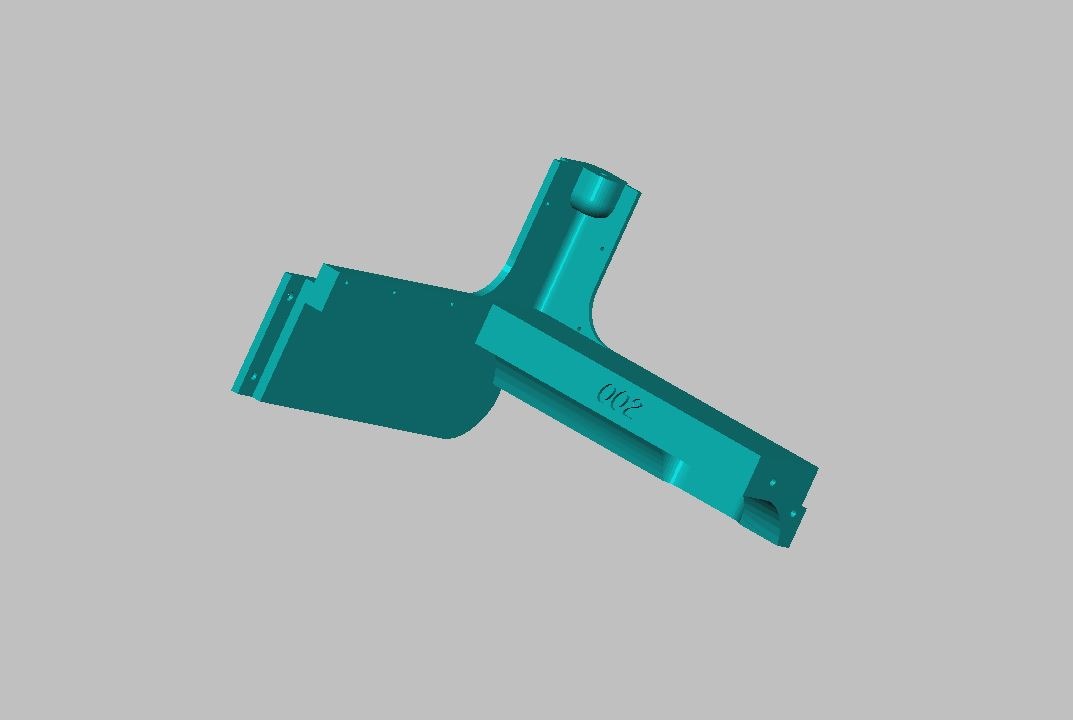
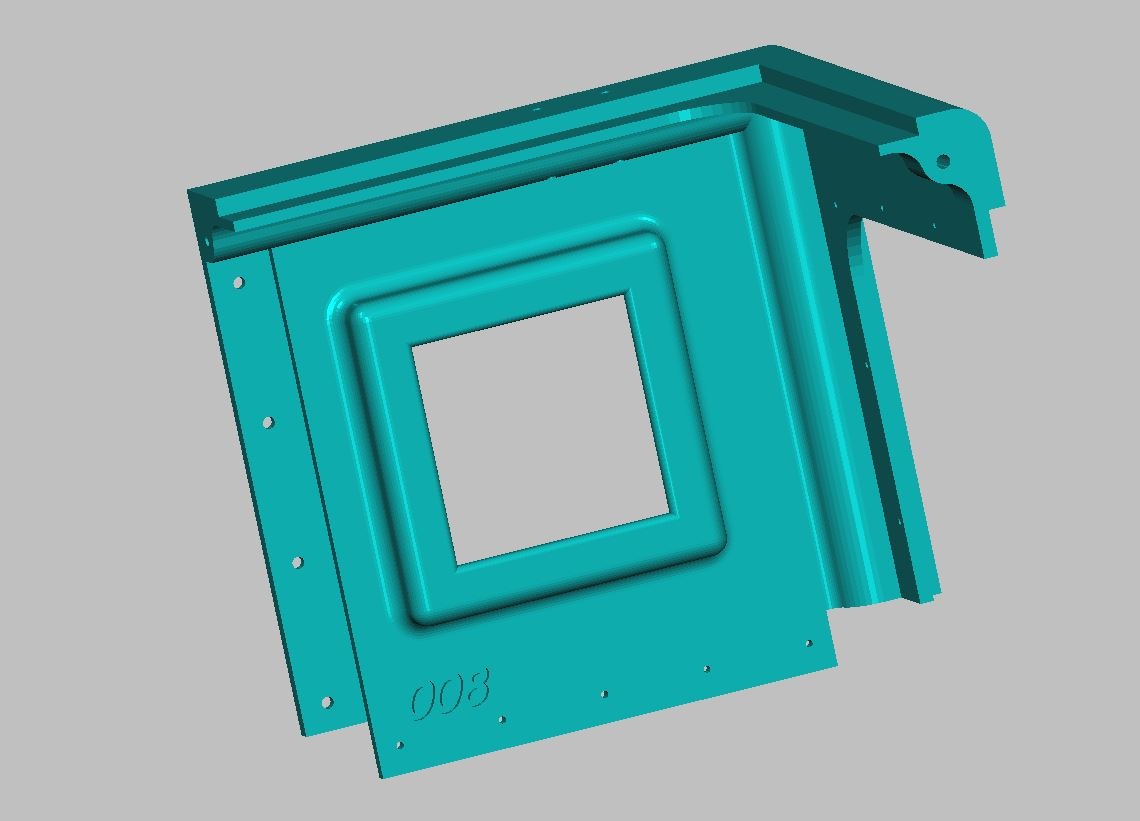
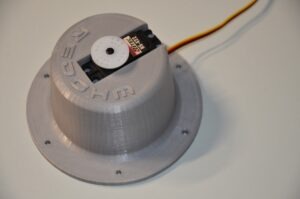
- 006 : Piece 002 – Socle
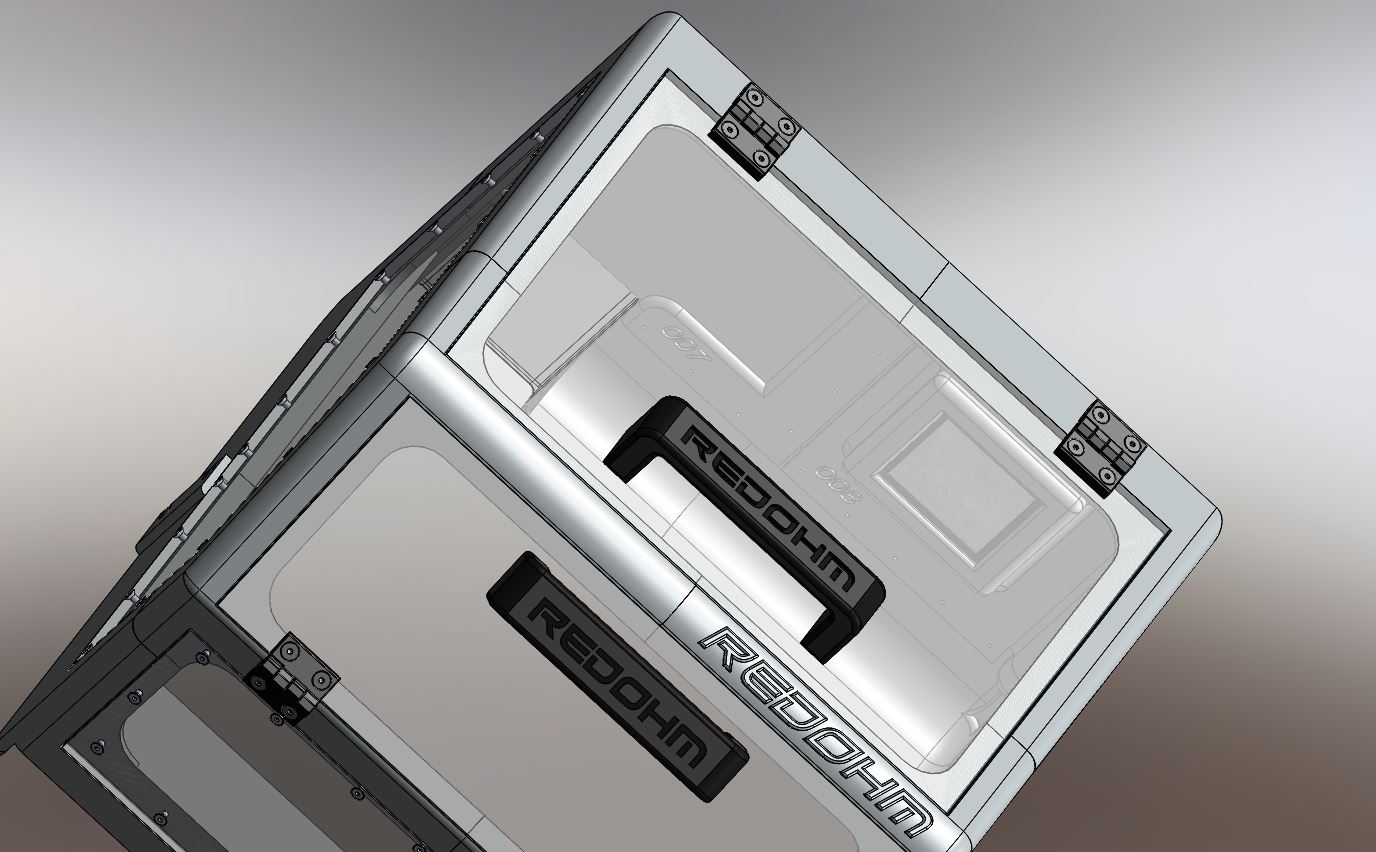
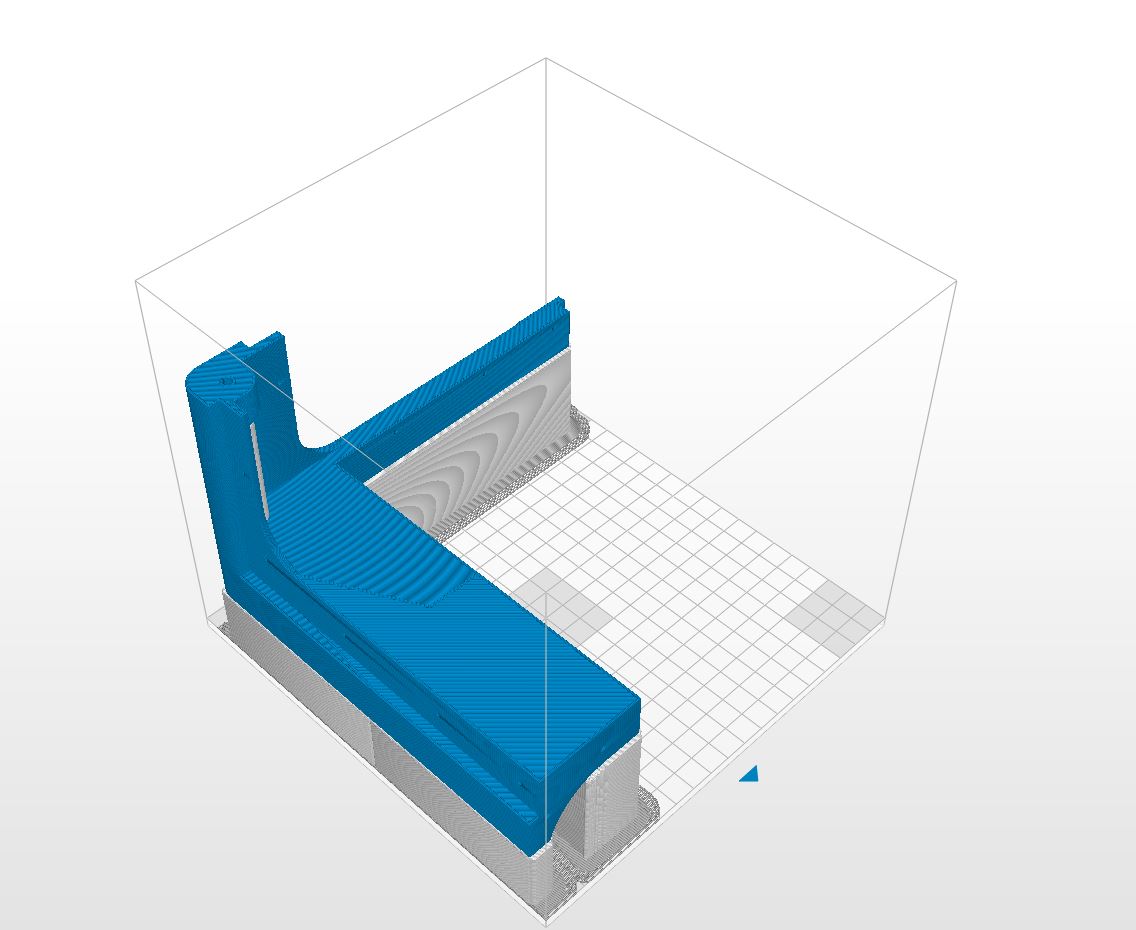
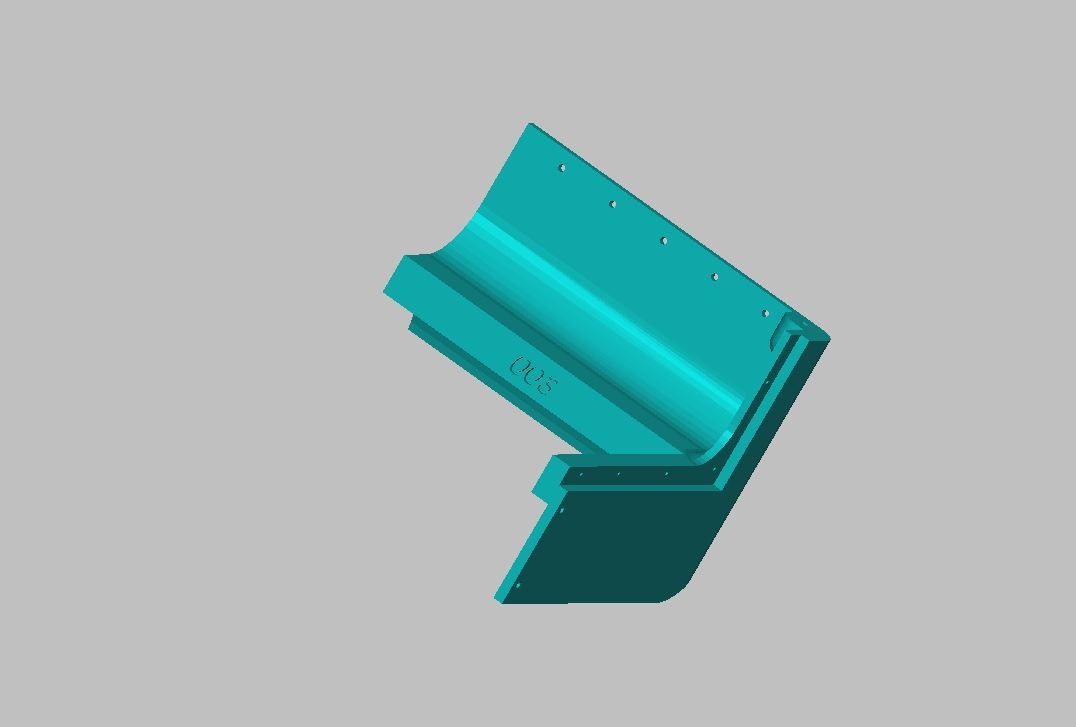
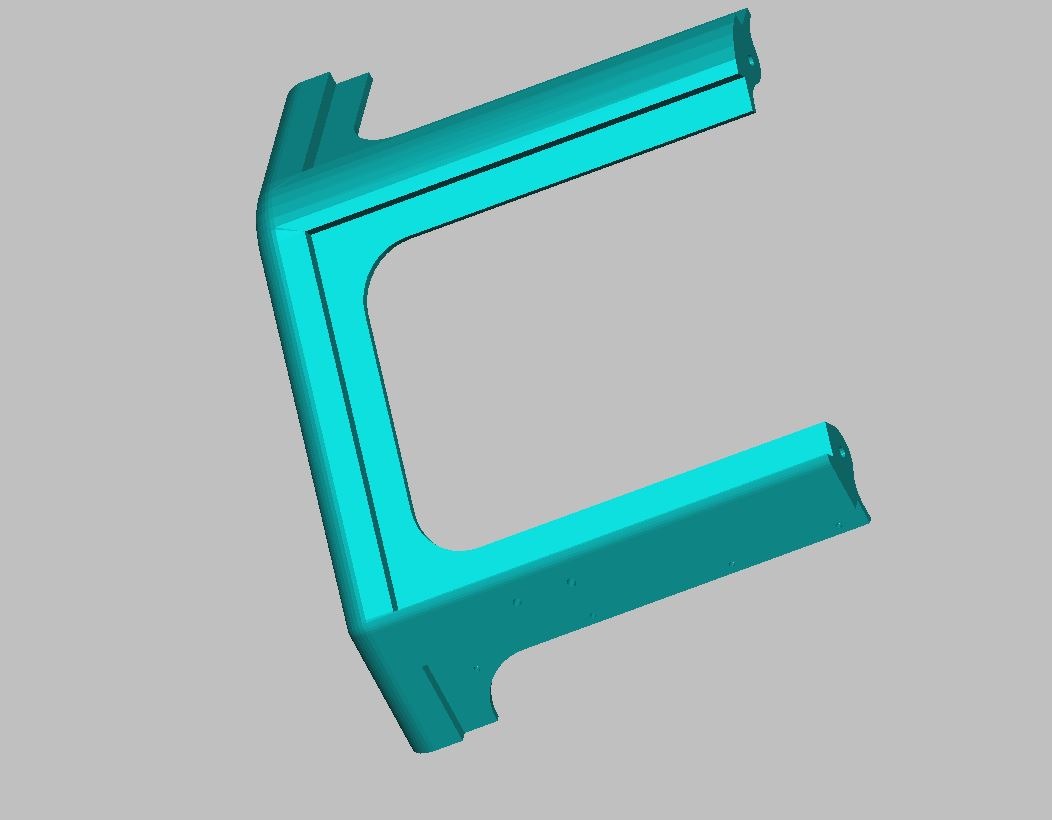
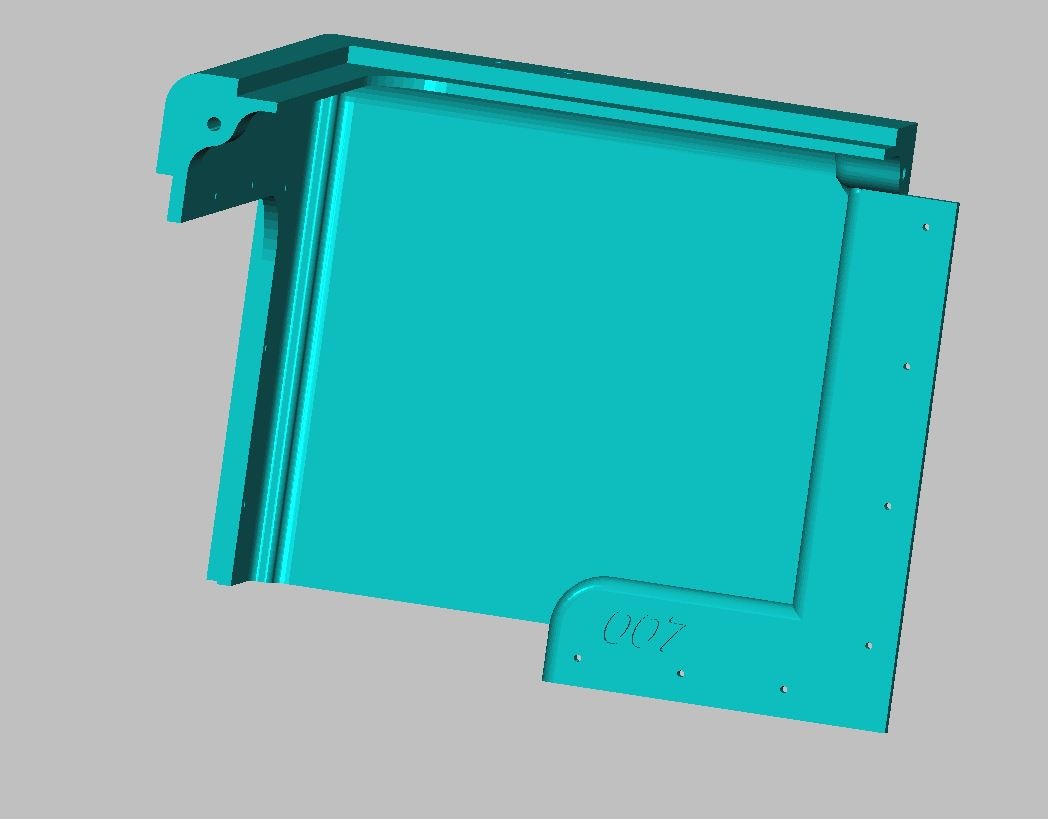
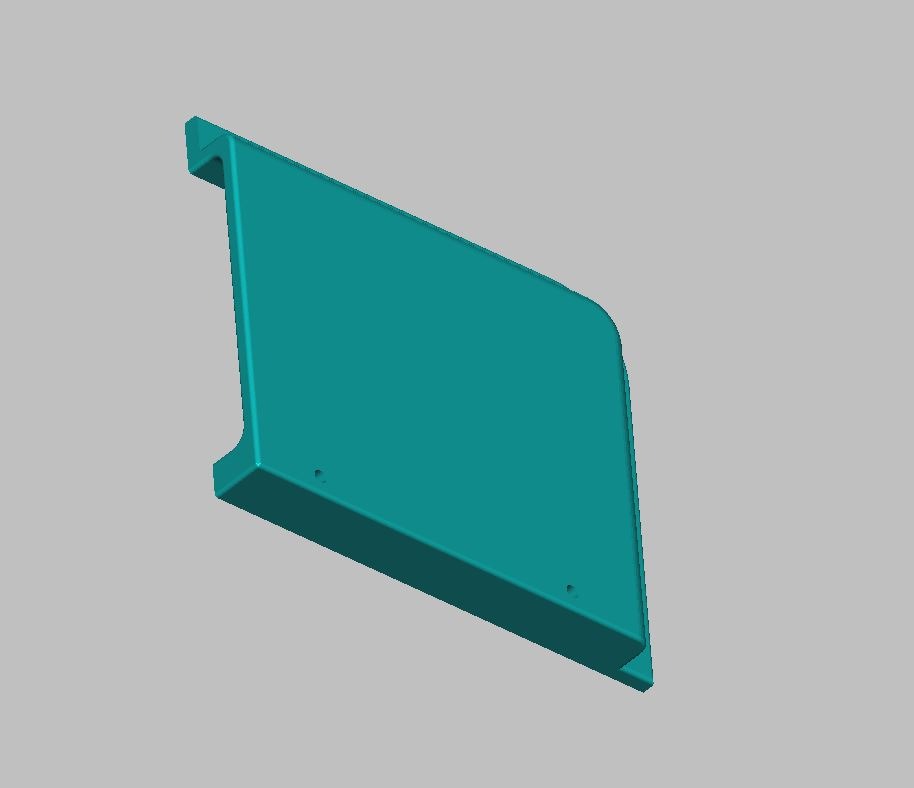
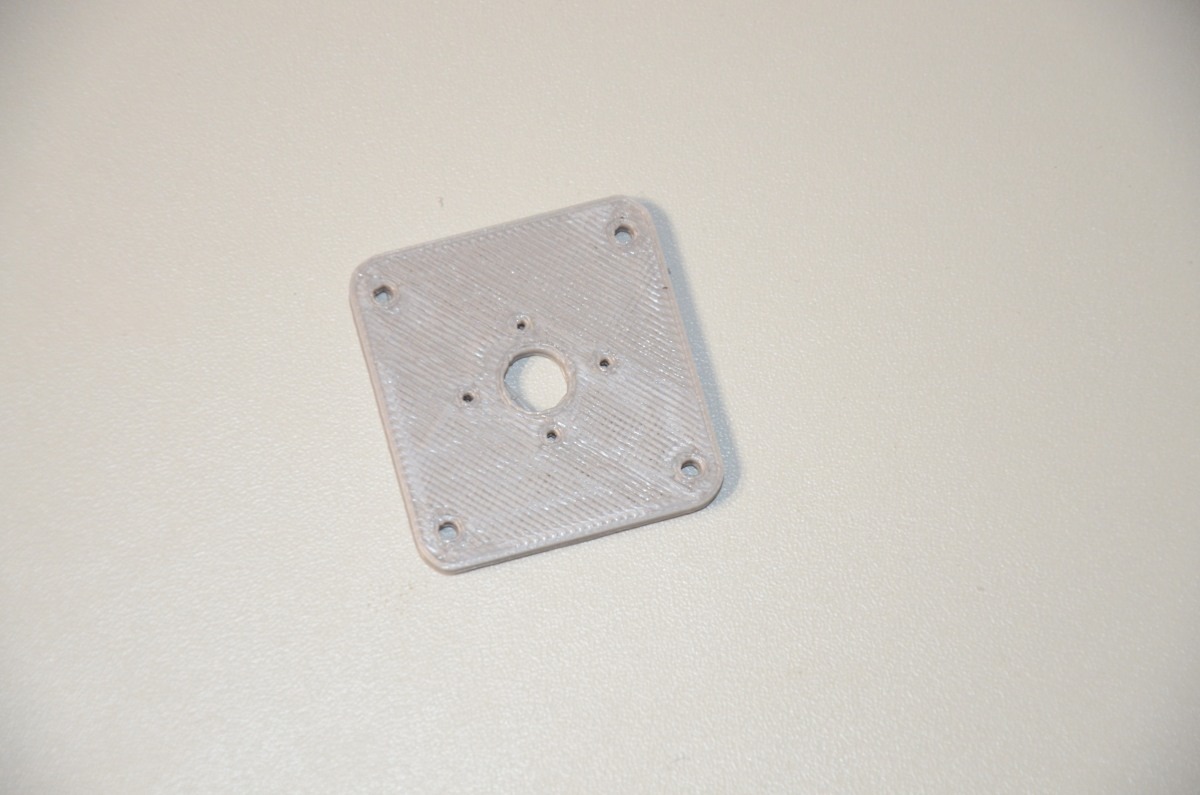
- 007 : Piece 003 – tablette
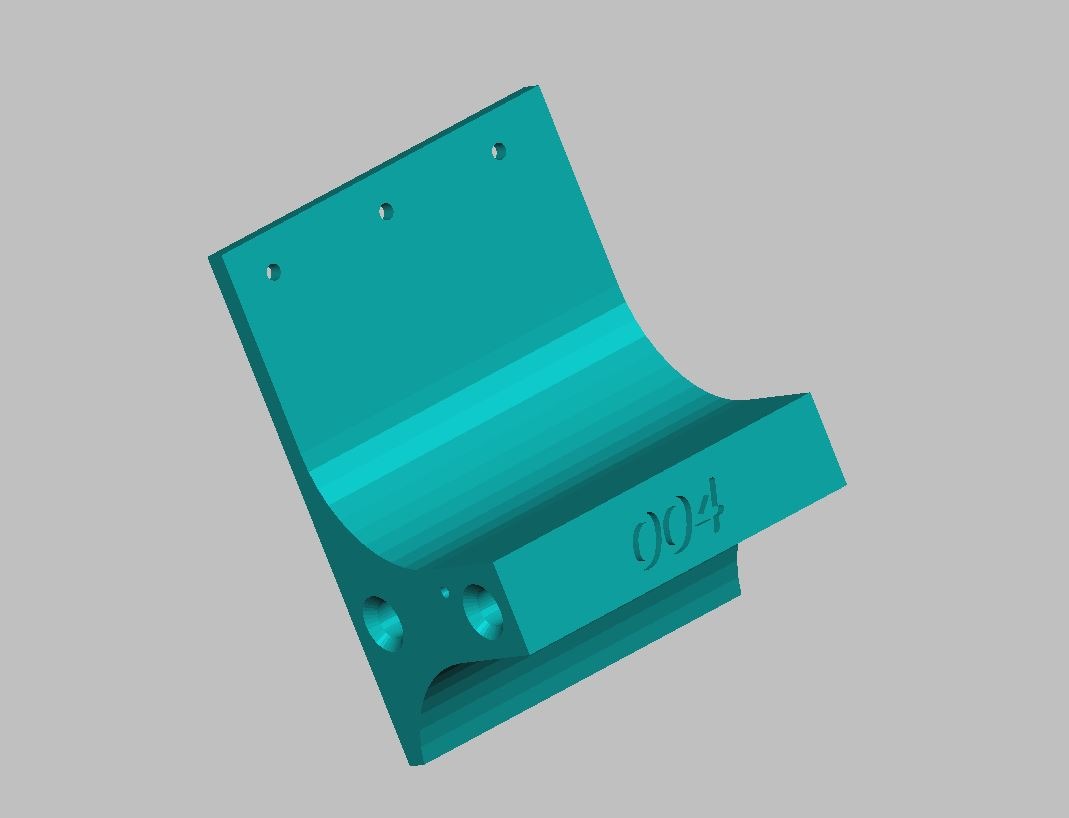
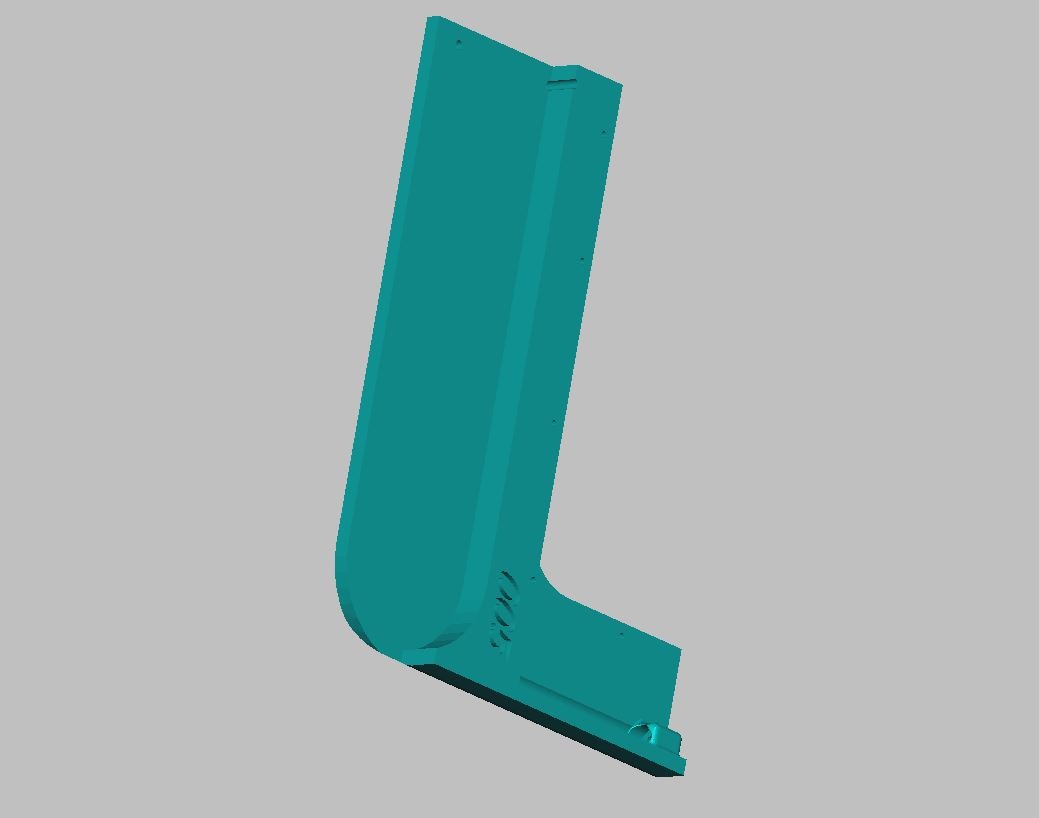
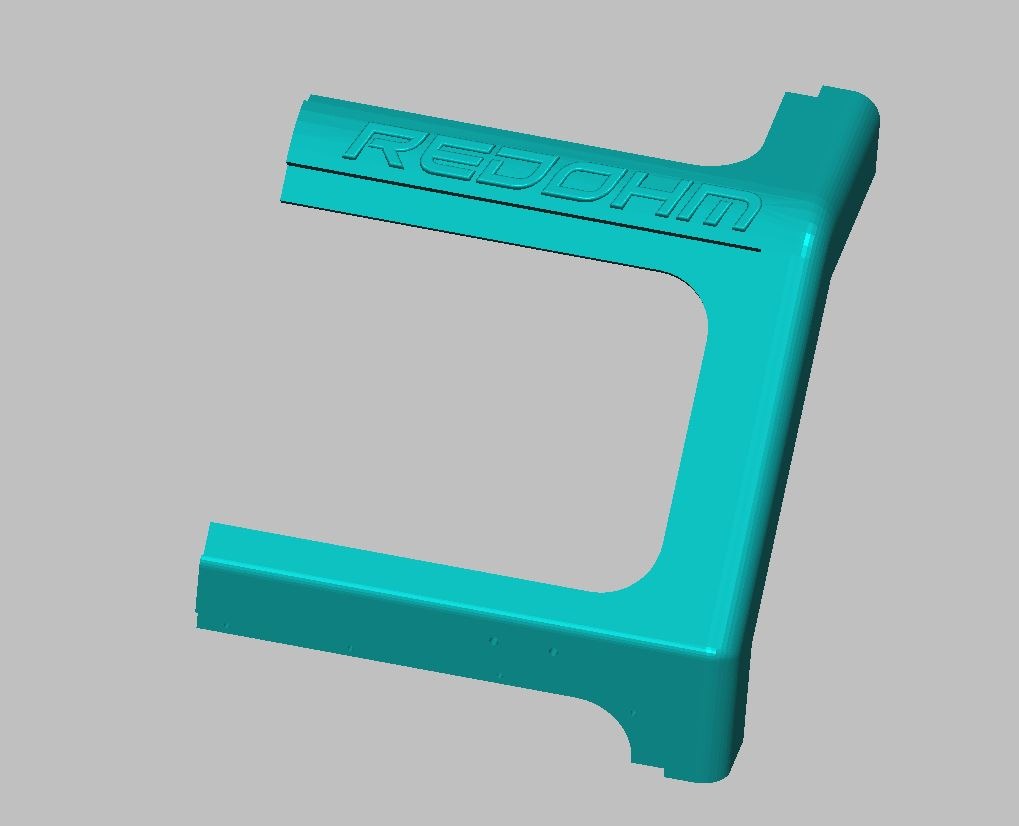
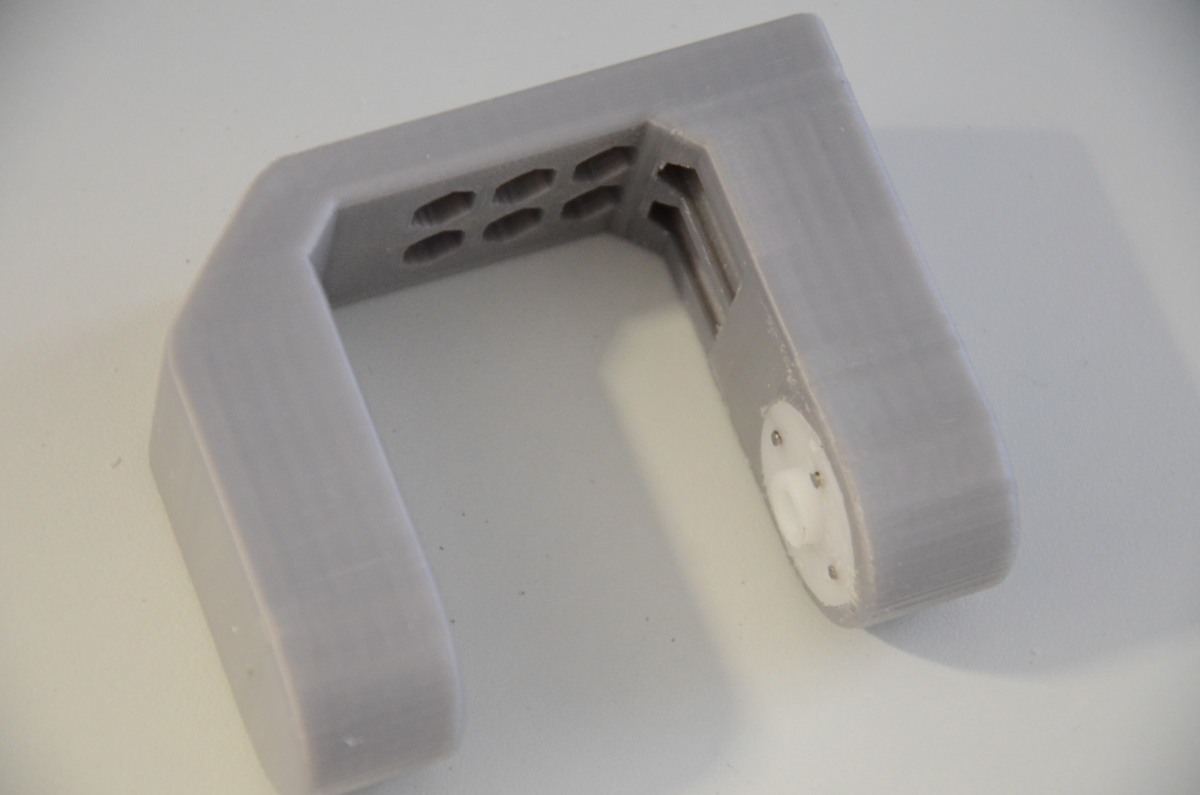
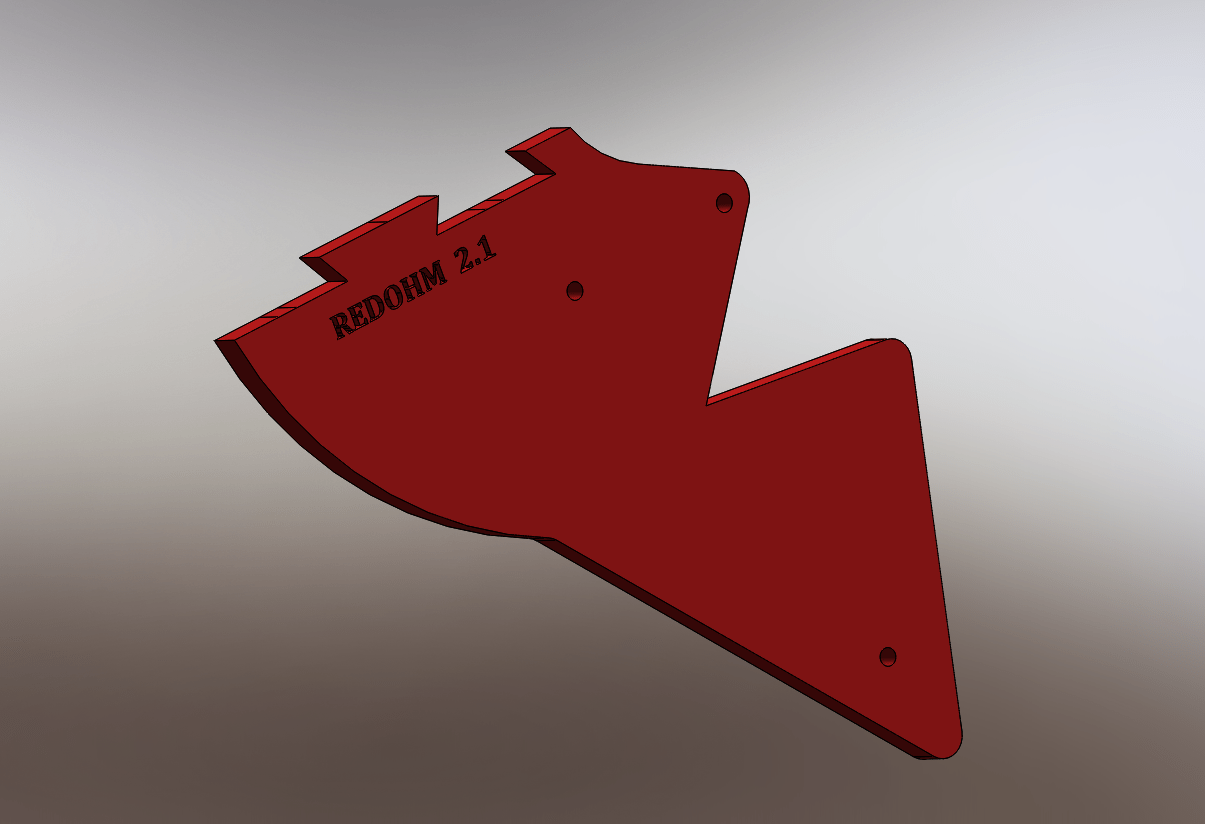
- 008 : Piece 004 – bras porte tablette
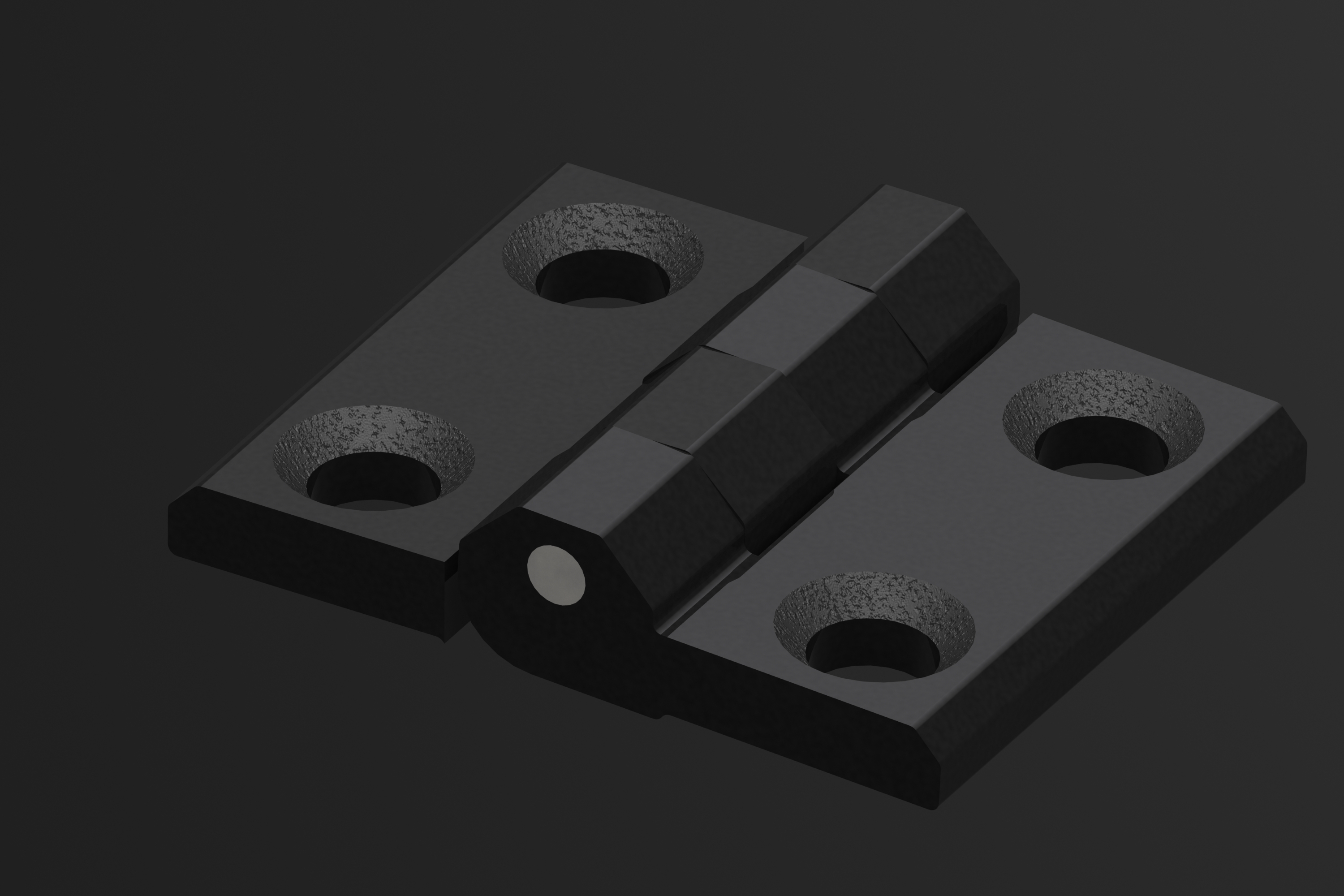
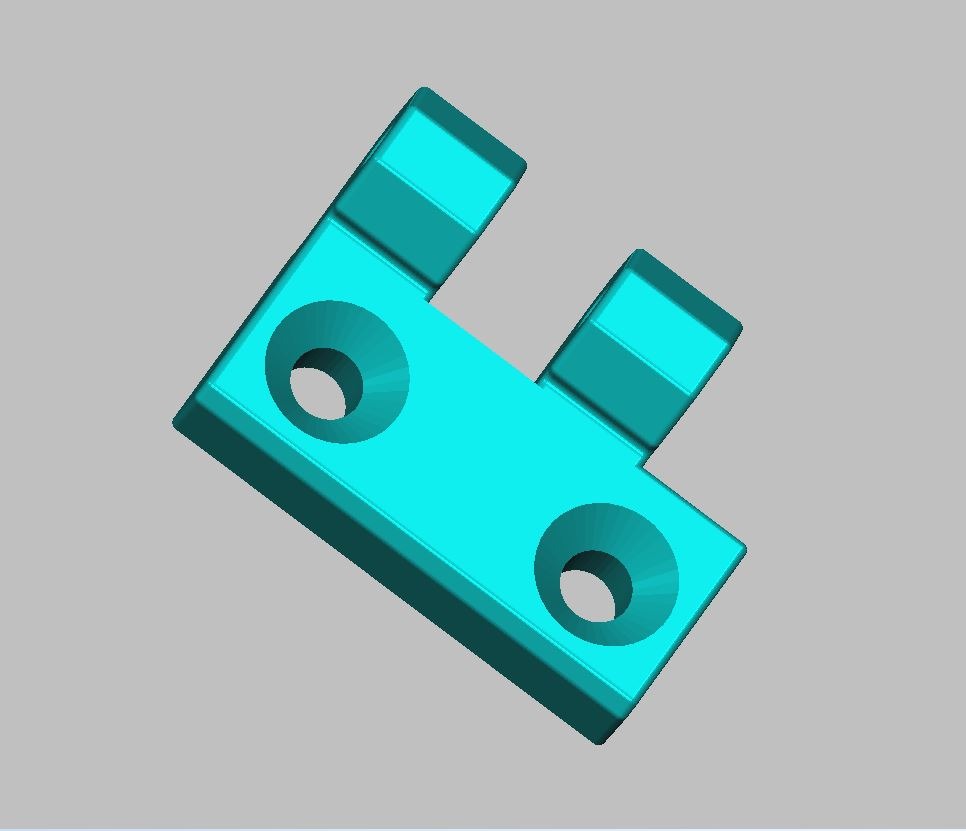
- 009 : Pièce 005-Targette
- 010 : Pièce 006 verrou tablette
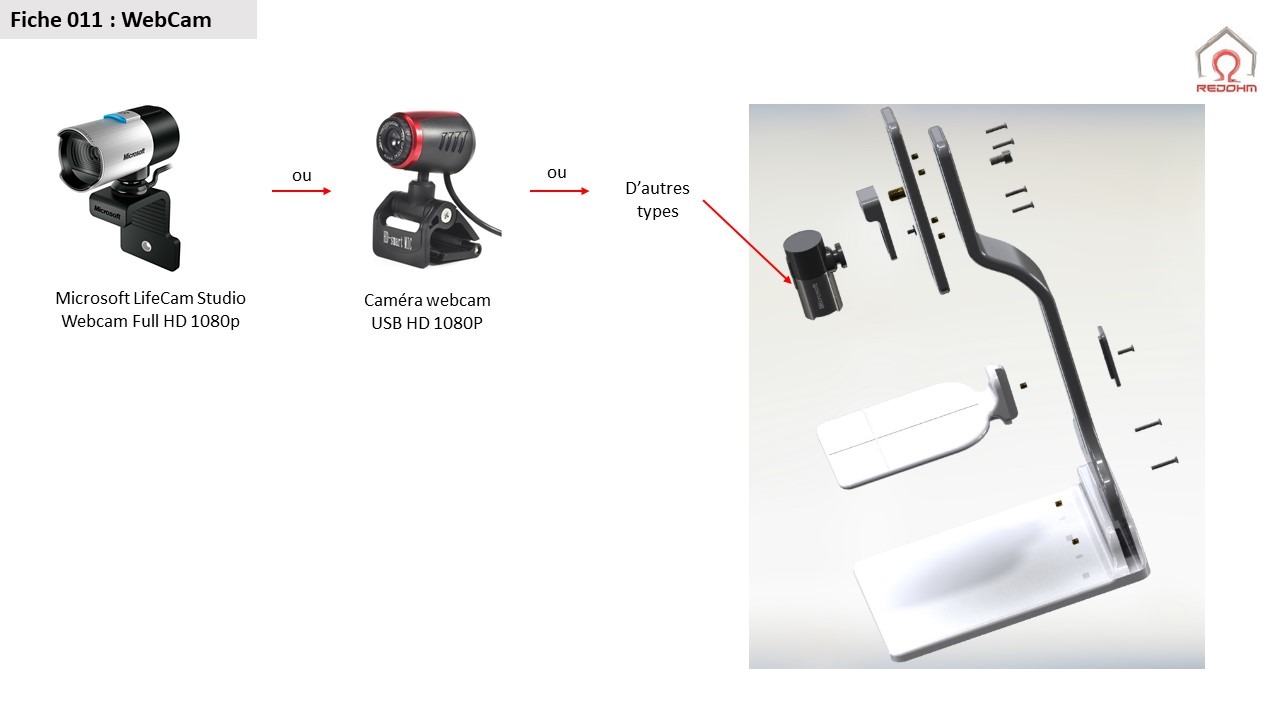
- 011 : WebCam
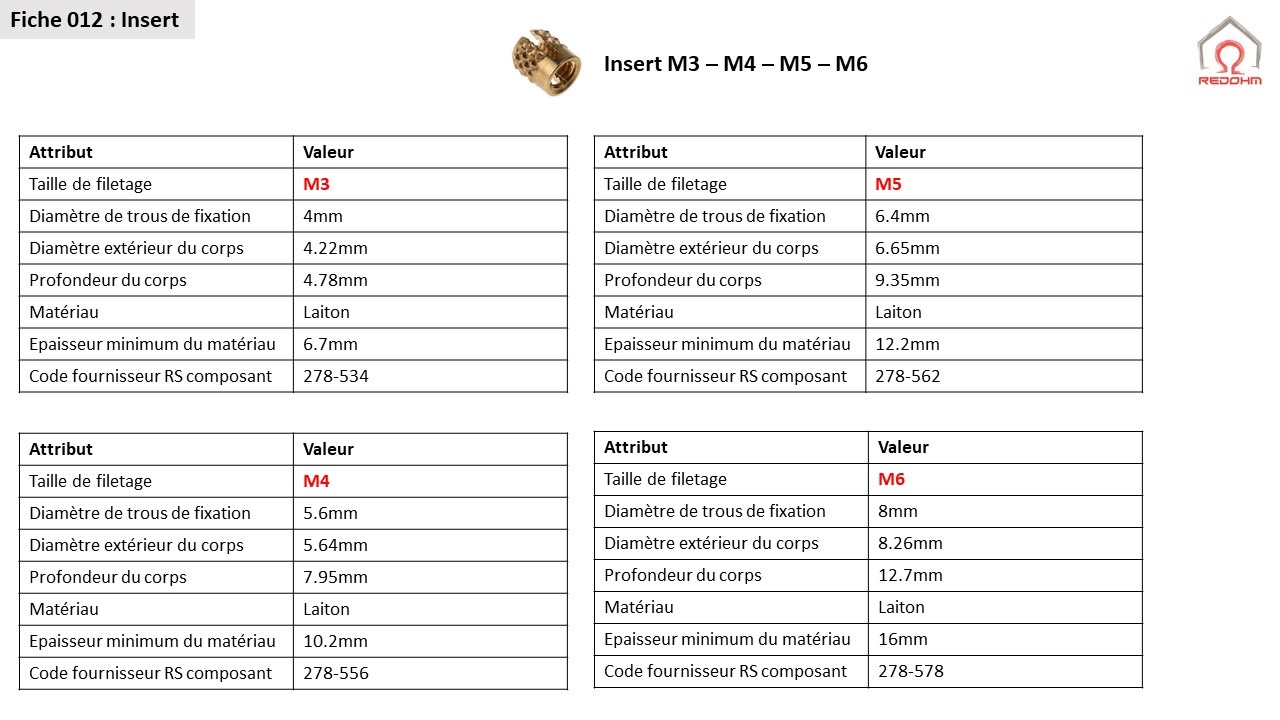
- 012 : Documentation sur les inserts
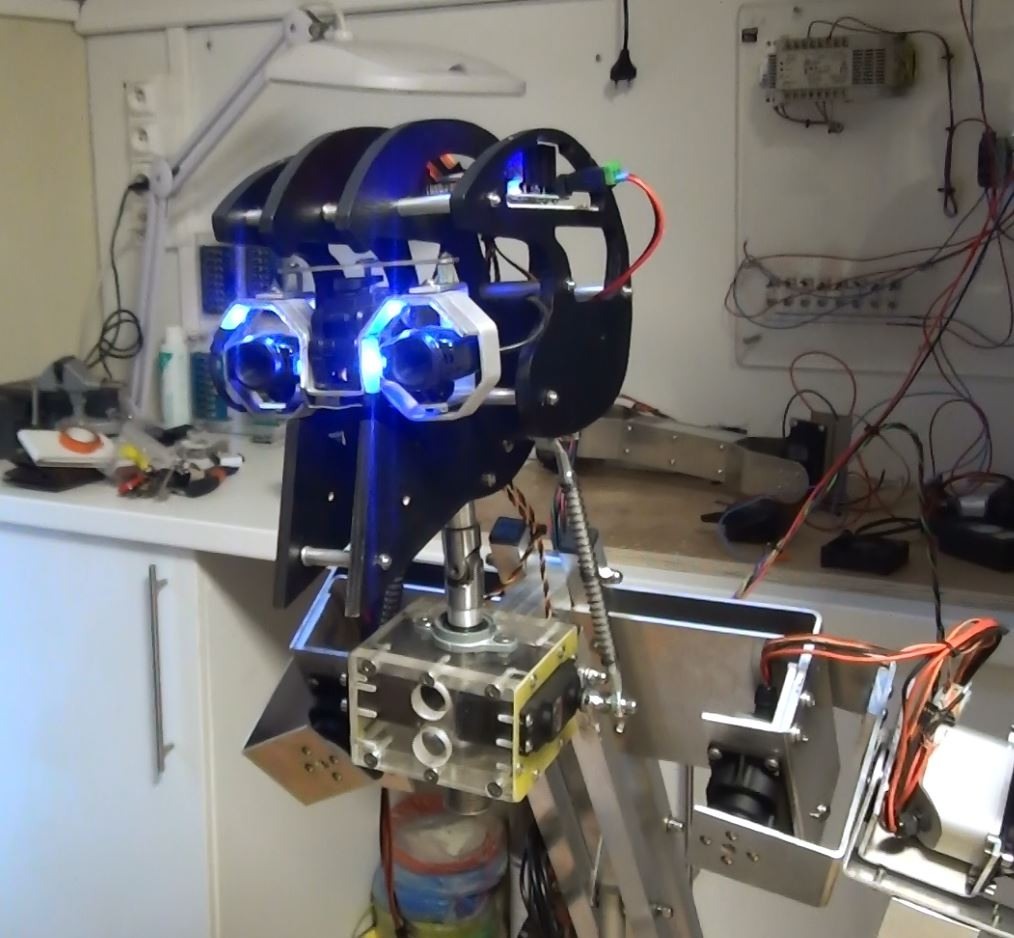
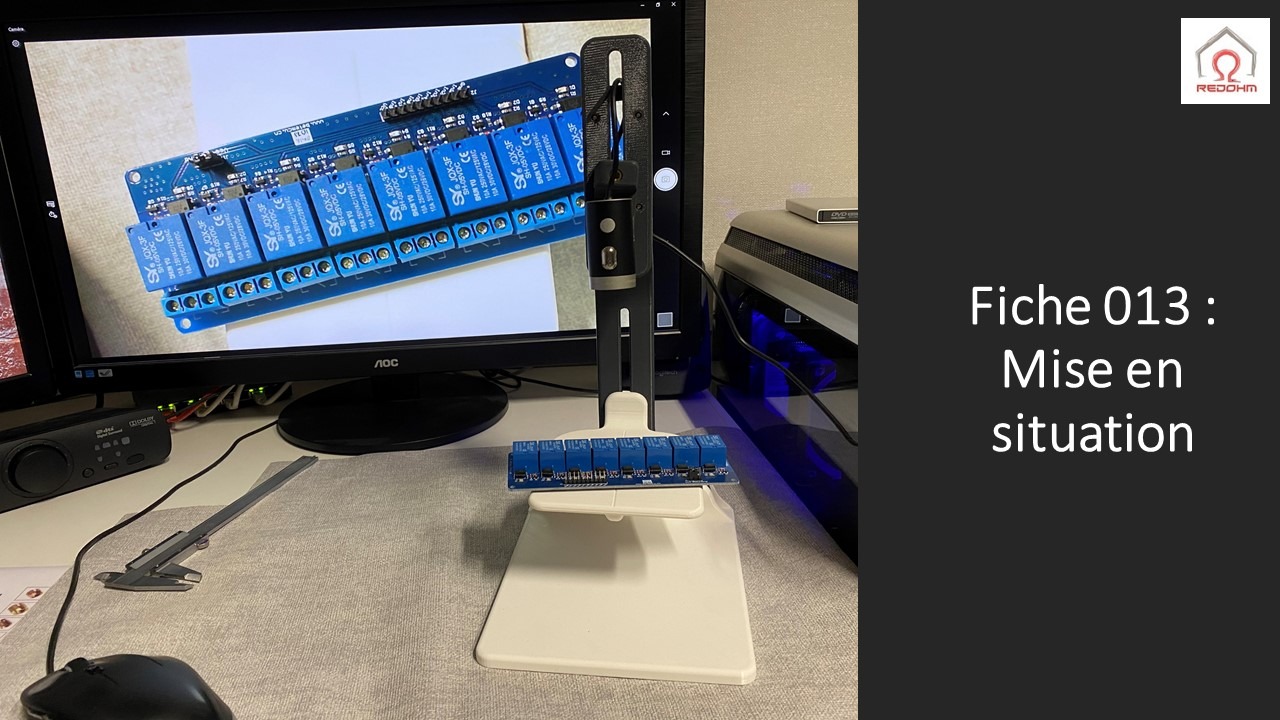
- 013 : Mise en situation
- Pour tout probléme
- Retour au menu
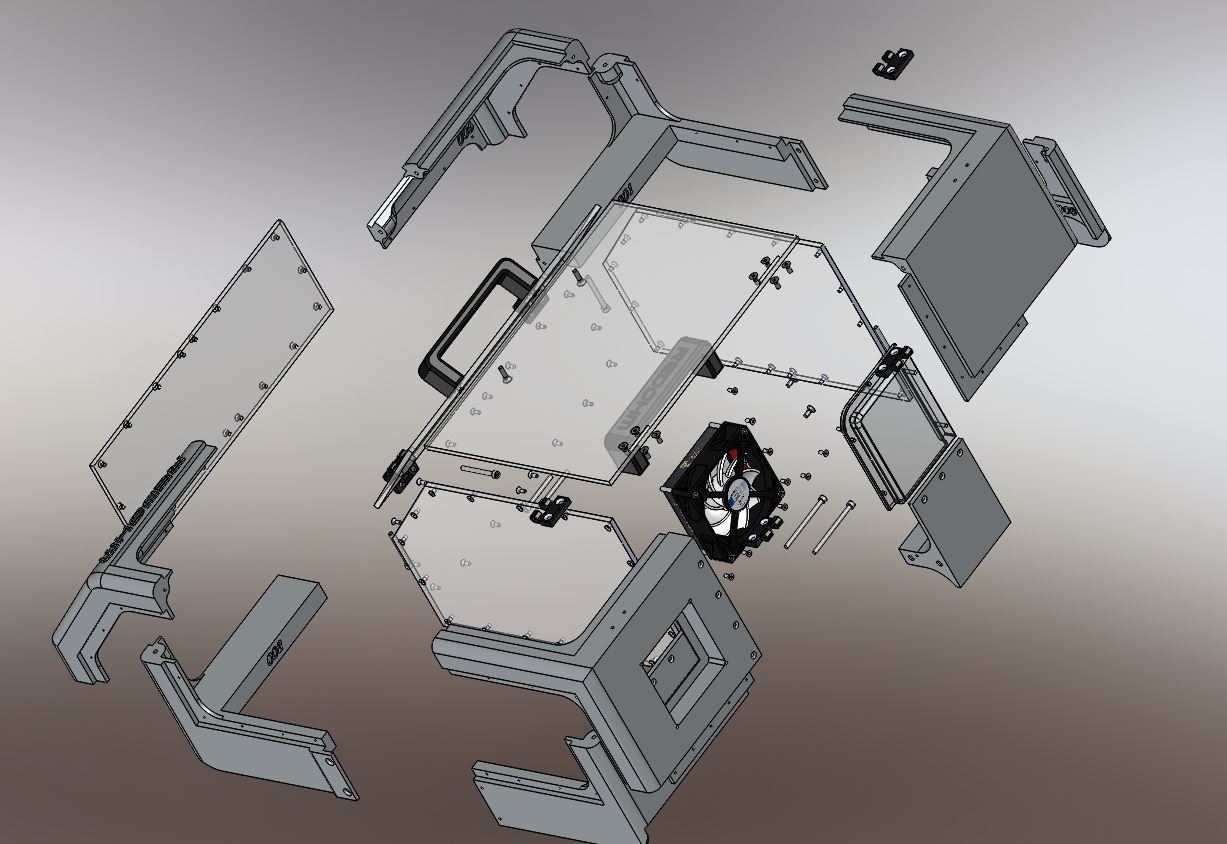
002 – Plan de montage |
.
.
Retour au sommaire
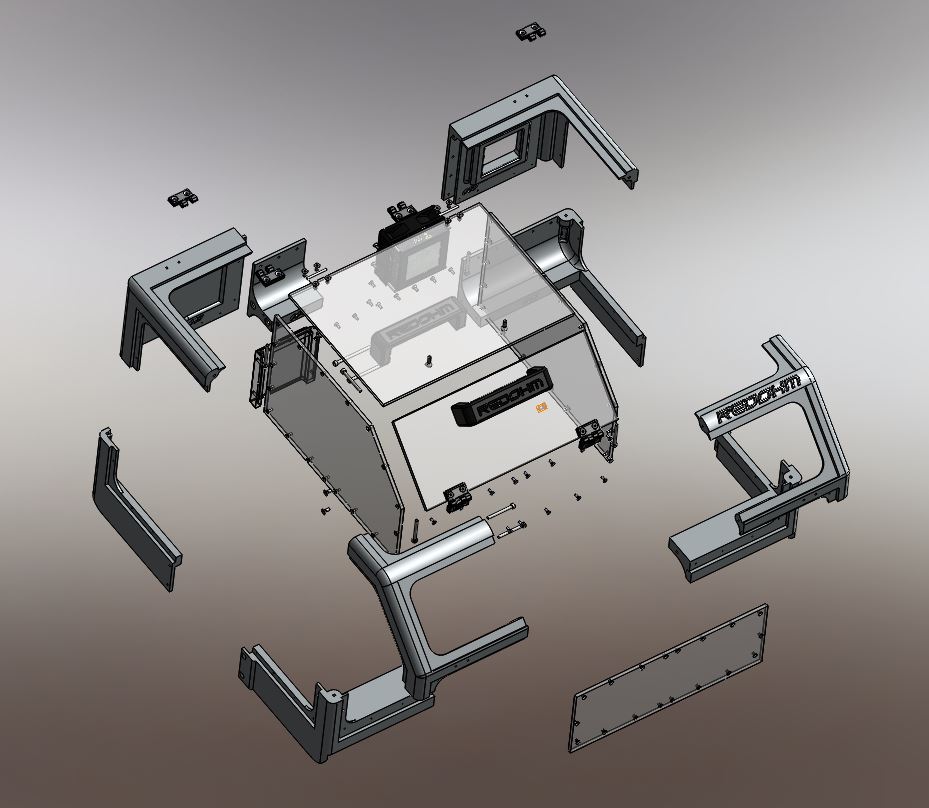
003 – Plan de montage B1 |
.
.
Retour au sommaire
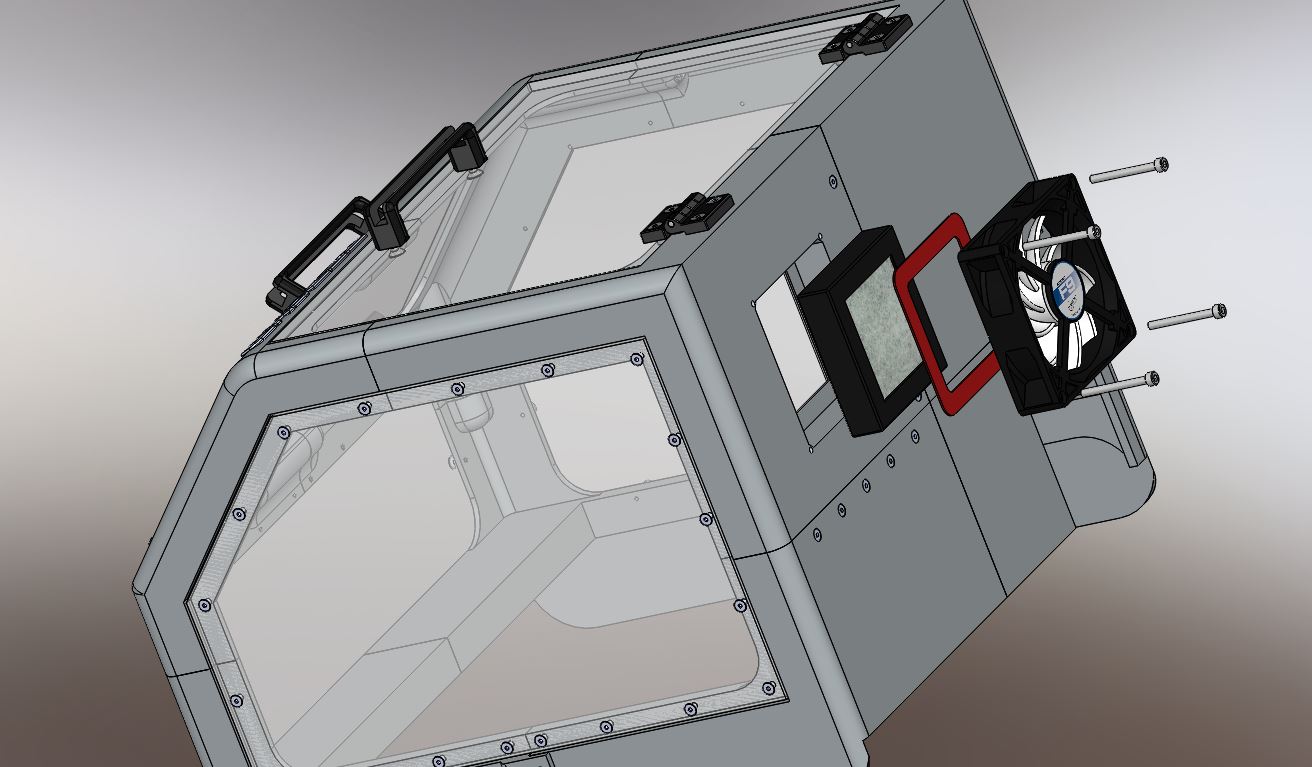
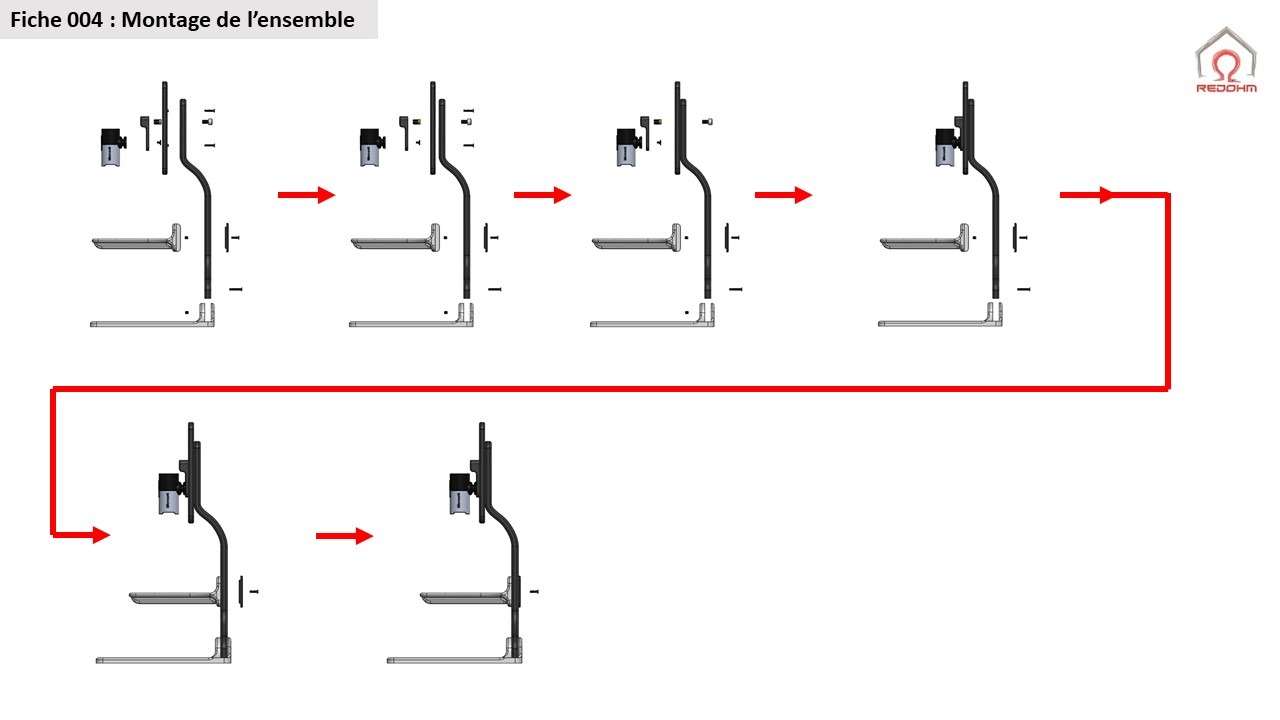
004 – Montage de l’ensemble |
.
.
Retour au sommaire
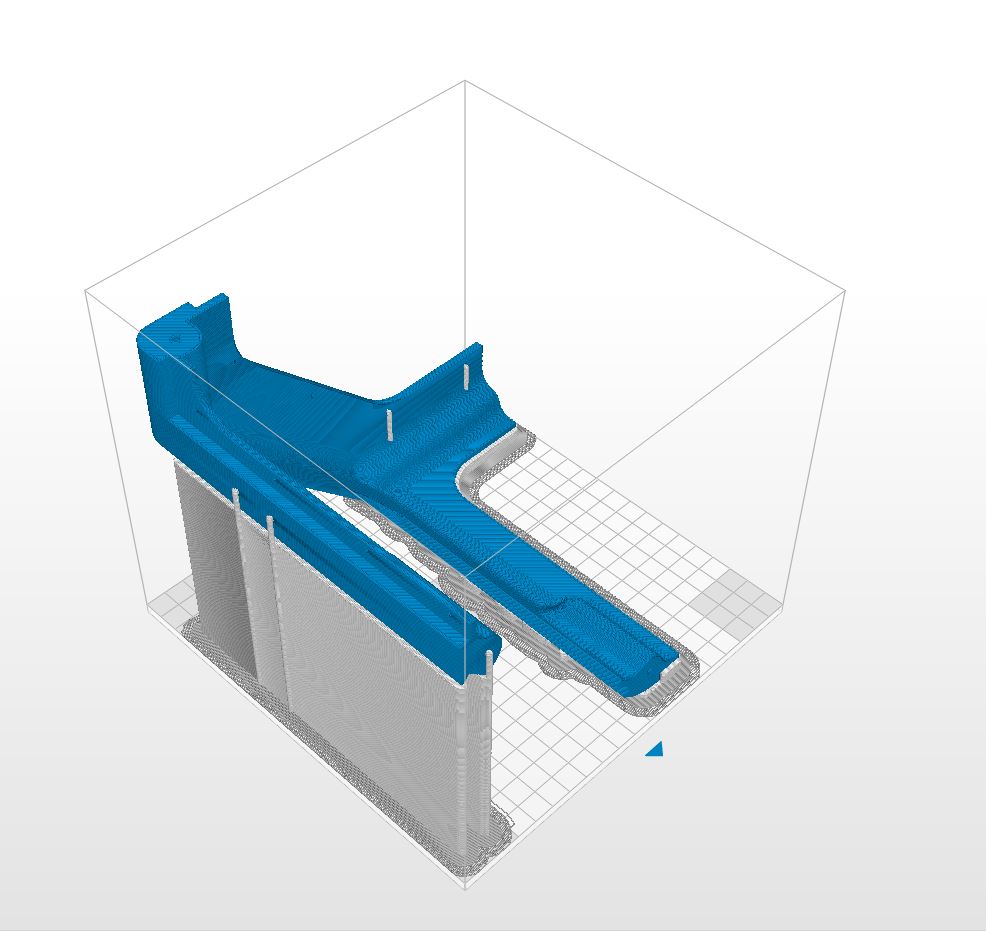
005 – Piece 001 – accessoire webcam |
.

.
Retour au sommaire
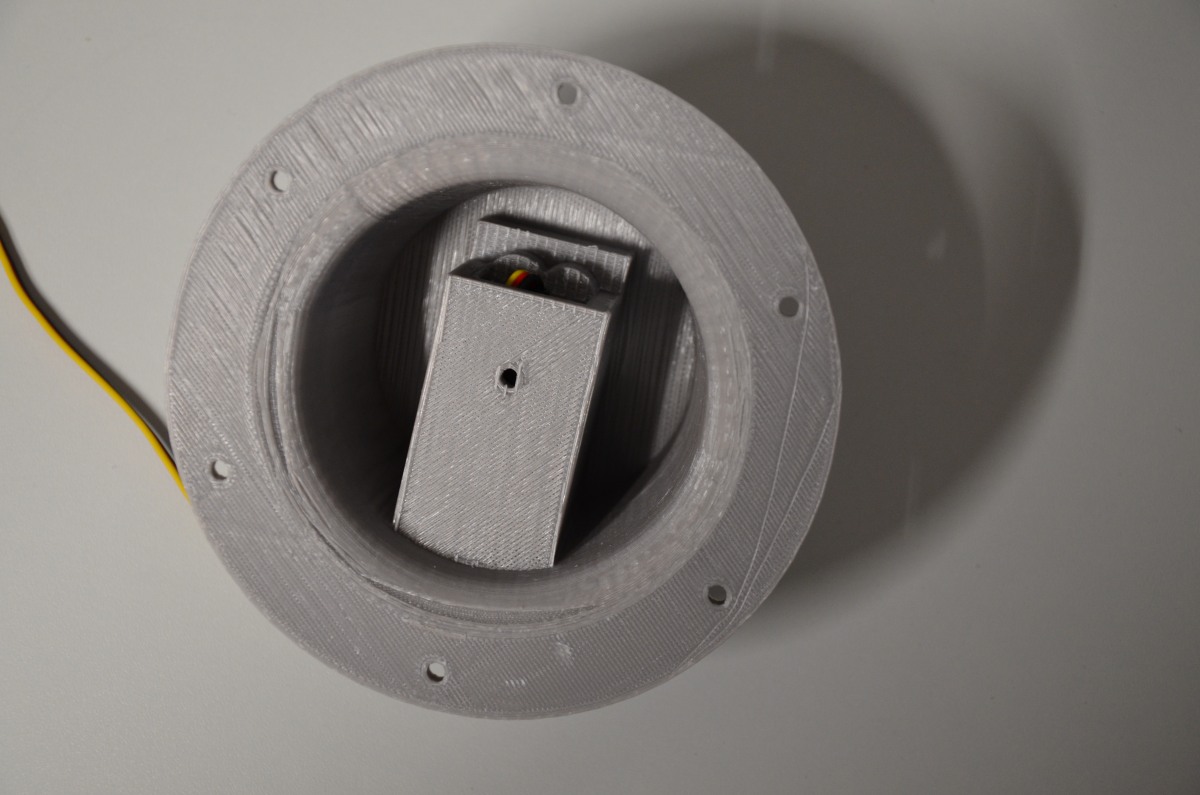
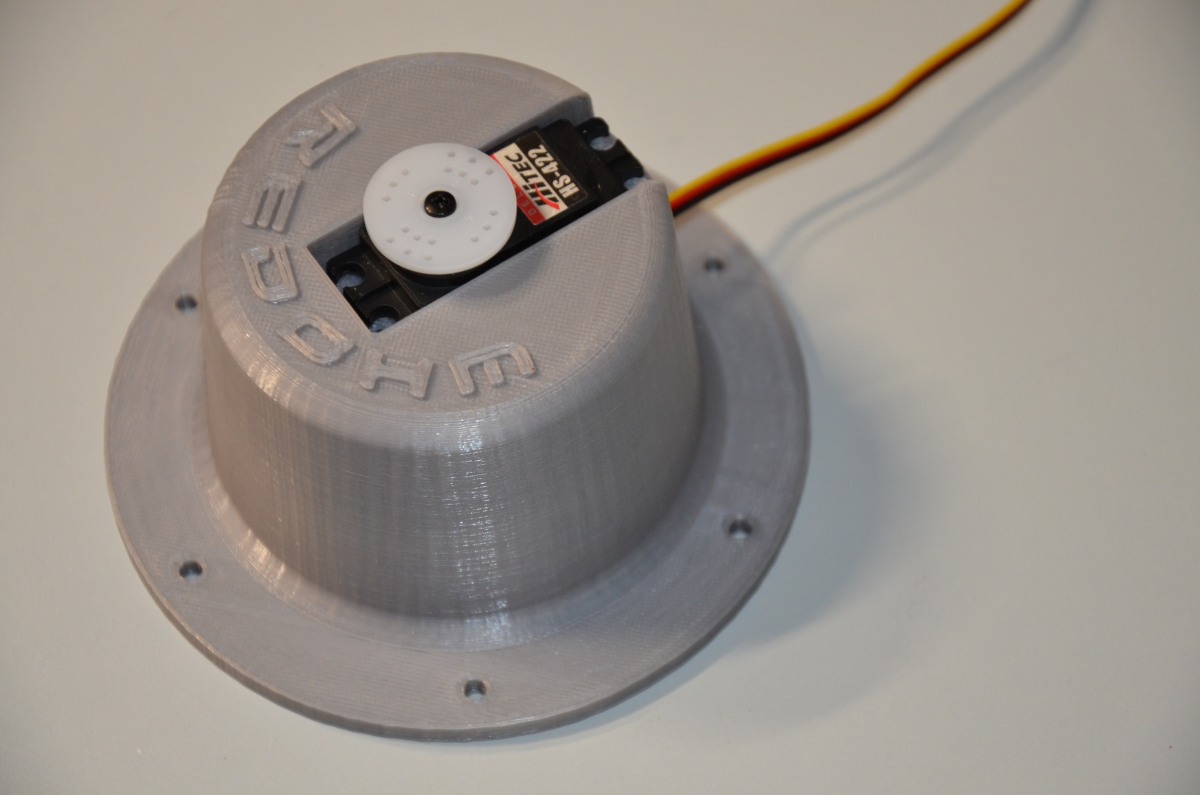
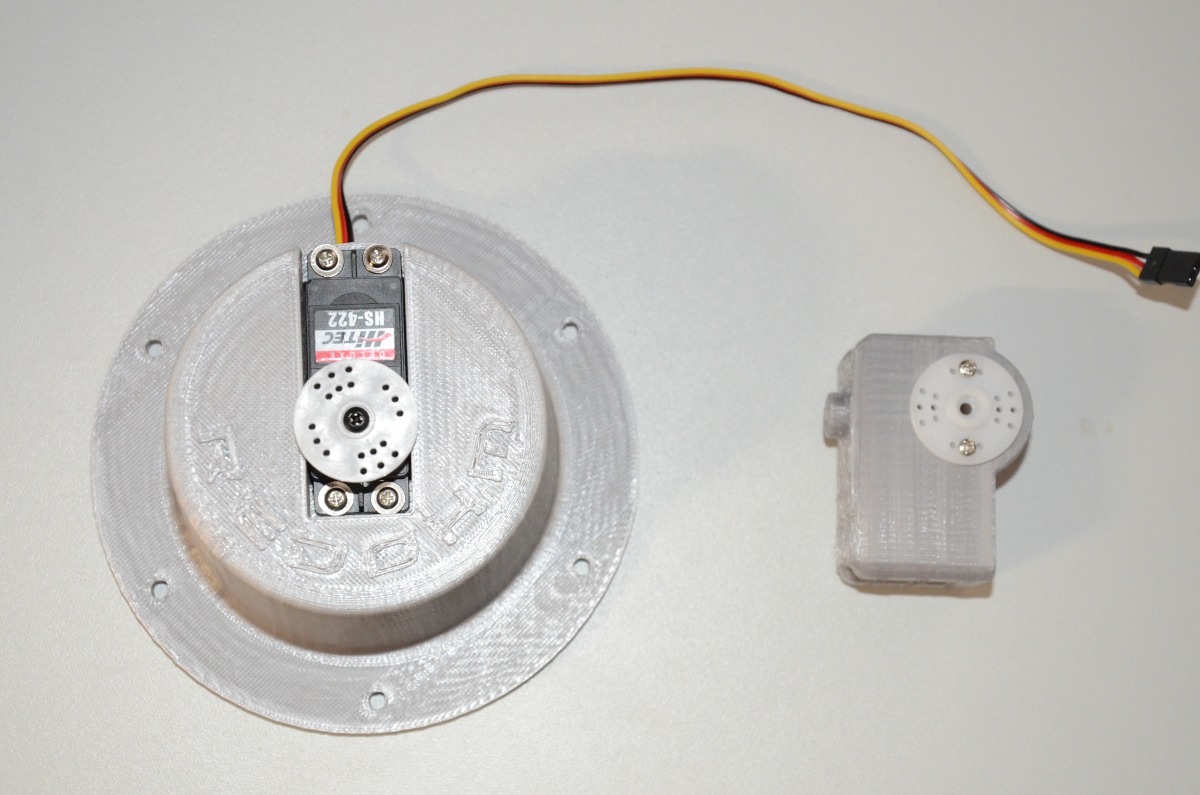
006 – Piece 002 – Socle |
.

.
Retour au sommaire
007 – Piece 003 – tablette |
.
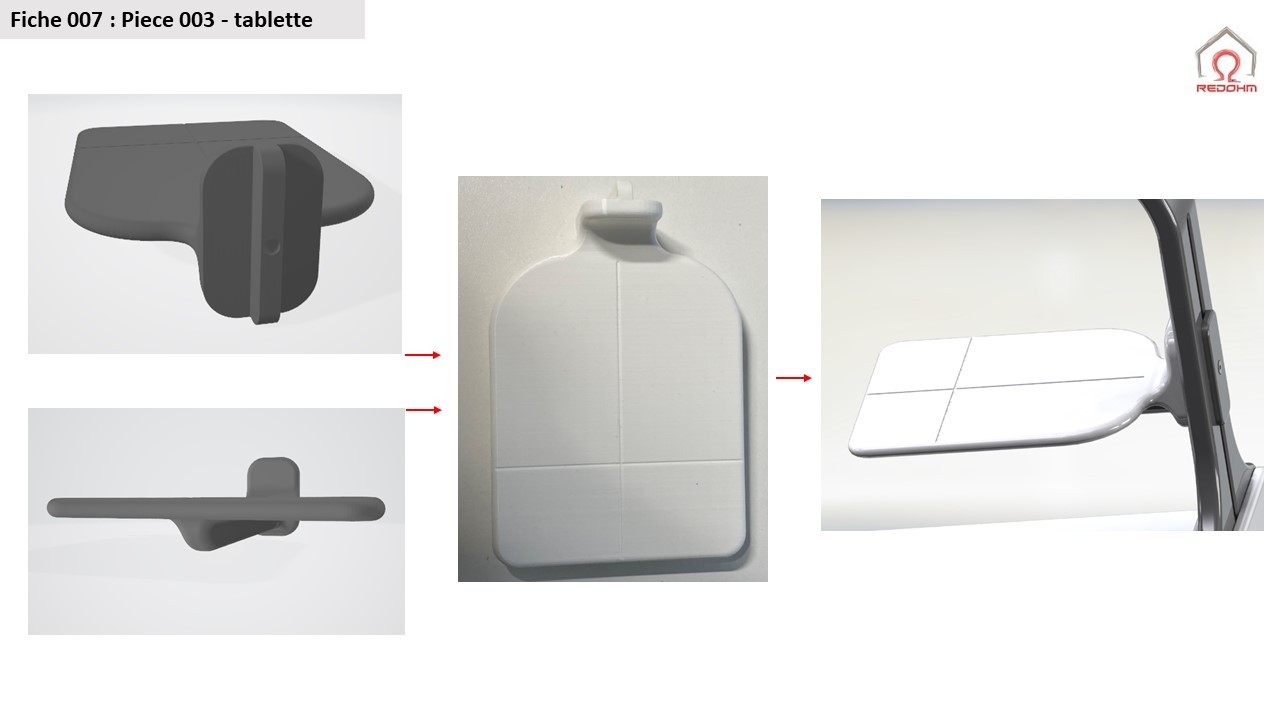
Fiche 007 – Piece 003 – tablette – RedOhm
.
Retour au sommaire
008 – Piece 004 – bras porte tablette |
.
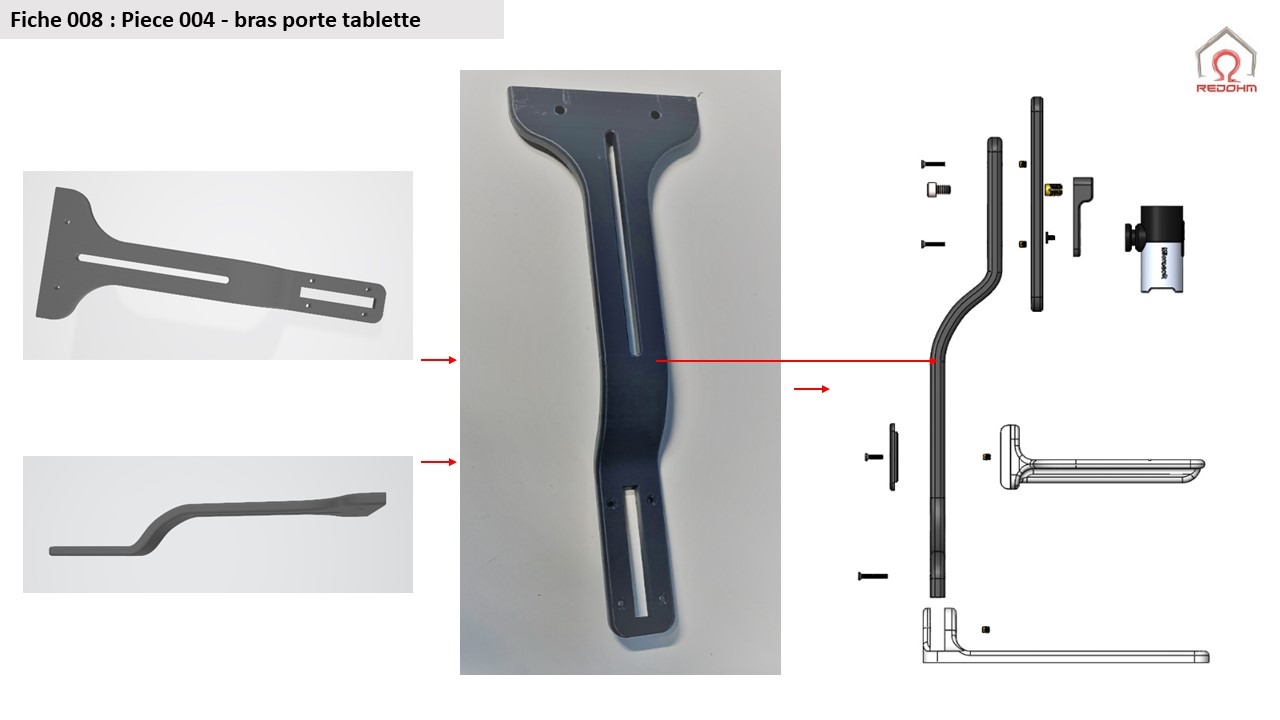
Fiche 008 – Piece 004 – bras porte tablette – RedOhm
.
Retour au sommaire
009 – Pièce 005-Targette |
.
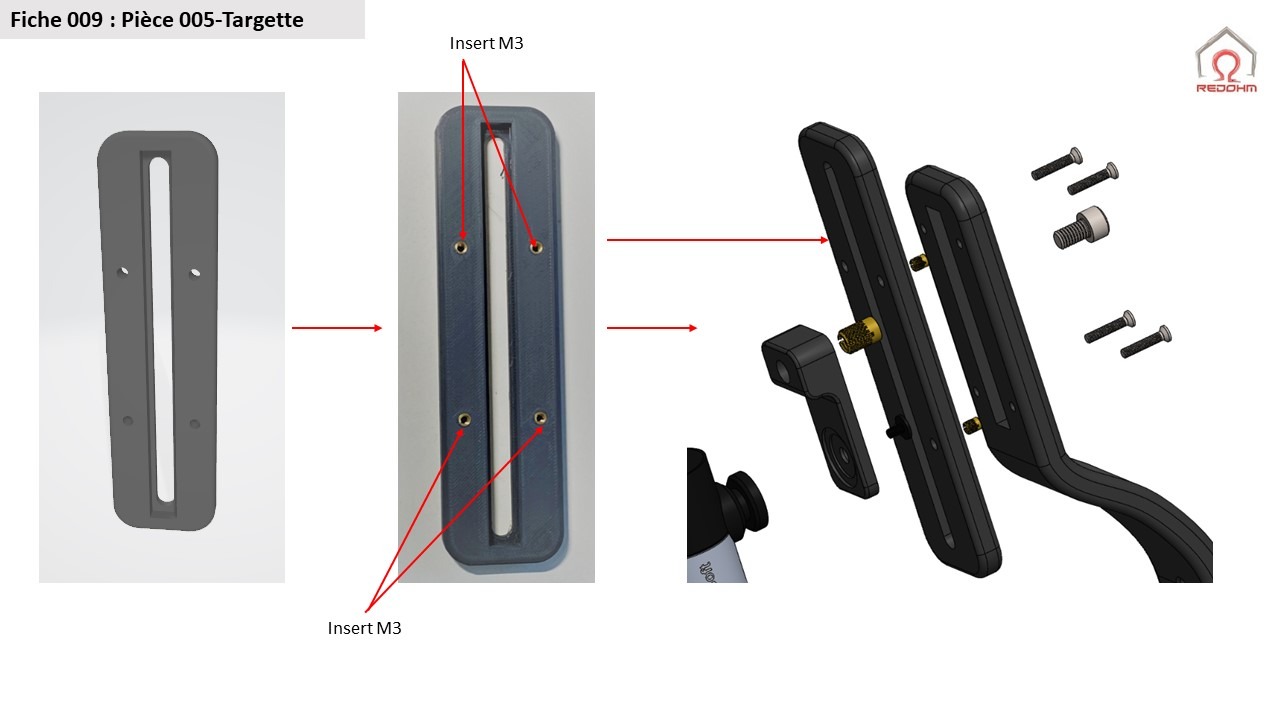
Fiche 009 – Pièce 005-Targette RedOhm
.
Retour au sommaire
010 – Pièce 006 verrou tablette |
.

.
Retour au sommaire
011 – WebCam |
.
.
Retour au sommaire
012 – Insert |
.
.
Retour au sommaire
013 – Mise en situation |
.
 .
.
Pour tout probléme |
.
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour au sommaire