.
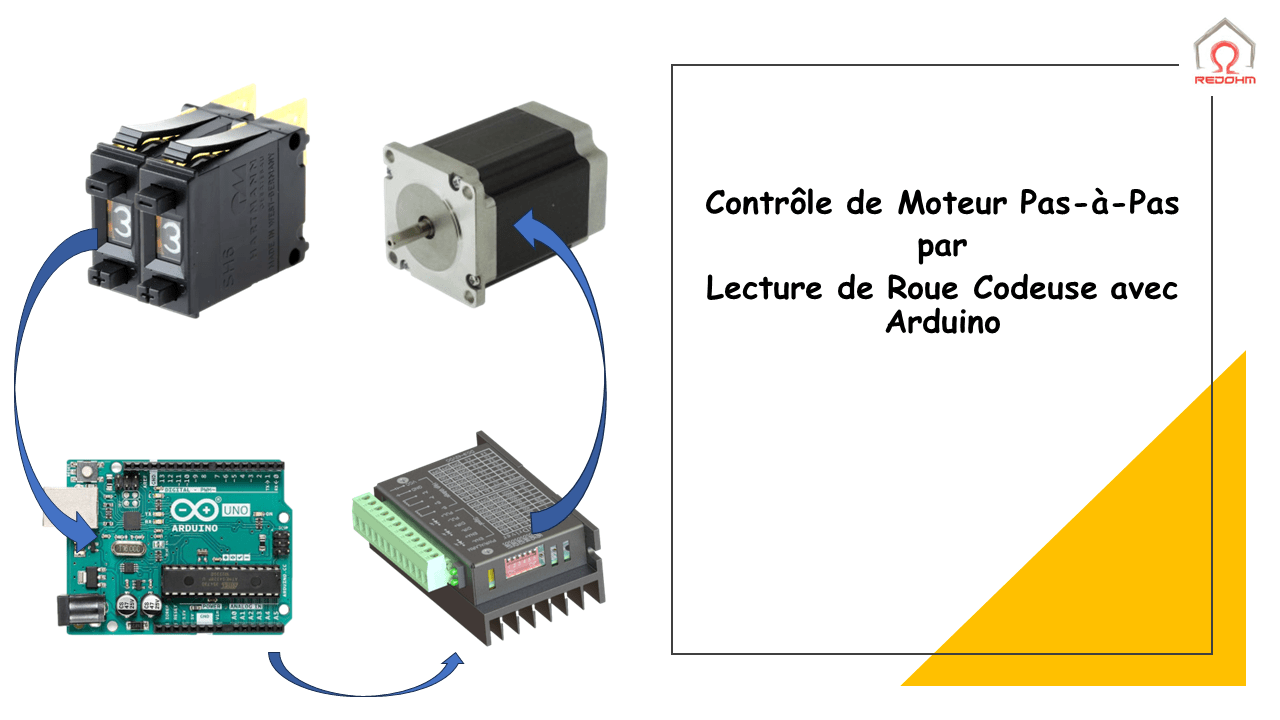
Ce tutoriel se concentre sur l’utilisation avancée de la bibliothèque AccelStepper pour le contrôle d’un moteur pas-à-pas en utilisant Arduino, enrichi par l’intégration de deux roues codeuses BCD pour un réglage fin du nombre de pas. À travers ce projet, vous apprendrez à configurer des entrées BCD pour saisir dynamiquement le nombre de rotations souhaitées, tout en bénéficiant d’une interface utilisateur simplifiée grâce à un bouton poussoir. Le système gère avec précision l’accélération et la vitesse du moteur, tout en évitant les déclenchements intempestifs via un mécanisme anti-rebond. Cette configuration est parfaitement adaptée aux projets nécessitant un contrôle précis de mouvement, tels que les équipements d’automatisation ou les installations artistiques interactives. Suivez ce guide pour assembler votre circuit, programmer votre Arduino, et explorer le potentiel des moteurs pas-à-pas contrôlés numériquement.
![]()
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celles qui vous intéressent .