
.
📜 Description : Dans cette vidéo, nous allons explorer un programme Arduino conçu pour contrôler la vitesse d’un moteur brushless en utilisant un contrôleur BLD-300B. Le code utilise la communication série pour recevoir des valeurs de vitesse entre 0 et 255, qui sont ensuite appliquées au moteur via ce contrôleur spécifique.
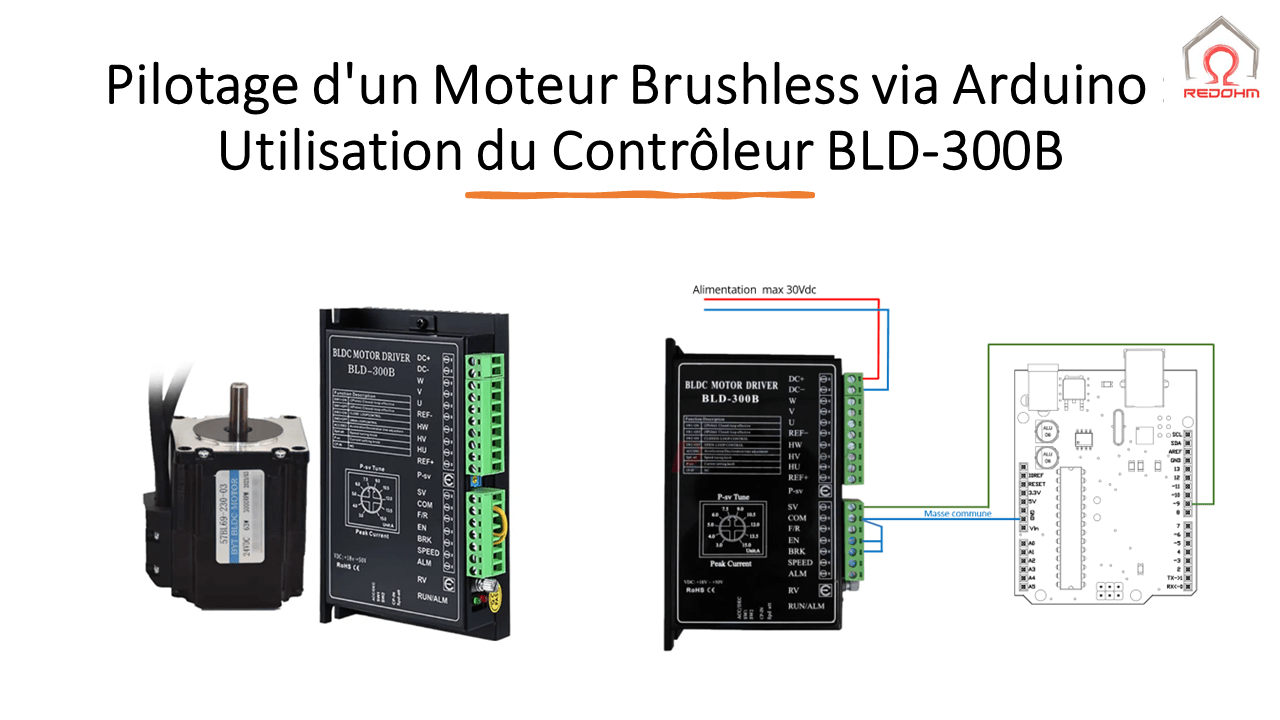
🔍 À propos du Contrôleur BLD-300B : Le BLD-300B est un contrôleur de moteur brushless qui permet une régulation fine de la vitesse et du couple du moteur. Il est souvent utilisé dans des applications industrielles et de robotique pour un contrôle précis.
🔑 Points clés :
1️⃣ Utilisation du Contrôleur BLD-300B : Nous utilisons le contrôleur BLD-300B pour une meilleure régulation de la vitesse du moteur.
2️⃣ Configuration de la broche PWM : La broche 9 de la carte Arduino est configurée comme sortie pour le signal PWM.
3️⃣ Communication Série : Le programme utilise la communication série pour recevoir les valeurs de vitesse du moteur.
4️⃣ Validation des Entrées : Le code vérifie si les valeurs reçues sont dans la plage autorisée (0-255) avant de les appliquer.
5️⃣ Feedback Utilisateur : Des messages sont affichés sur le moniteur série pour informer l’utilisateur de l’état actuel du système.
N’oubliez pas de 👍 aimer la vidéo, de 🔔 vous abonner et de 💬 laisser un commentaire si vous avez des questions ou des suggestions !
📅 Date : 04/10/2023
🛠️ Version de l’IDE Arduino : 2.2.1
👨💻 Réalisé par : Hervé Mazelin pour RedOhm
Informations complémentaires :
Sur une carte Arduino, le signal PWM (Pulse Width Modulation, ou Modulation de Largeur d’Impulsion en français) est généralement utilisé pour simuler un signal analogique à l’aide d’une sortie numérique. Les cartes Arduino ont des broches spécifiques capables de générer des signaux PWM, souvent marquées avec un symbole « ~ » à côté du numéro de la broche.
La fonction analogWrite() est utilisée pour envoyer un signal PWM à une broche spécifique. Cette fonction prend deux arguments : le numéro de la broche et la valeur du rapport cyclique, qui est généralement un nombre entre 0 et 255. Par exemple, analogWrite(9, 127) enverra un signal PWM avec un rapport cyclique d’environ 50% à la broche 9.
Le microcontrôleur sur la carte Arduino génère le signal PWM en alternant rapidement la broche entre les états haut et bas, en modifiant la durée pendant laquelle la broche reste à chaque état selon la valeur du rapport cyclique spécifié. Par exemple, une valeur de 127 sur une échelle de 0 à 255 fera en sorte que la broche soit à l’état haut environ 50% du temps et à l’état bas les 50% restants.
Le signal PWM sur Arduino est souvent utilisé pour contrôler la vitesse des moteurs, régler la luminosité des LEDs, ou même générer des sons simples. Cependant, il est important de noter que même si cela peut simuler un comportement analogique, le signal généré est en réalité toujours numérique (état haut ou bas), et certains dispositifs peuvent nécessiter un filtrage supplémentaire pour fonctionner correctement avec un signal PWM.