.
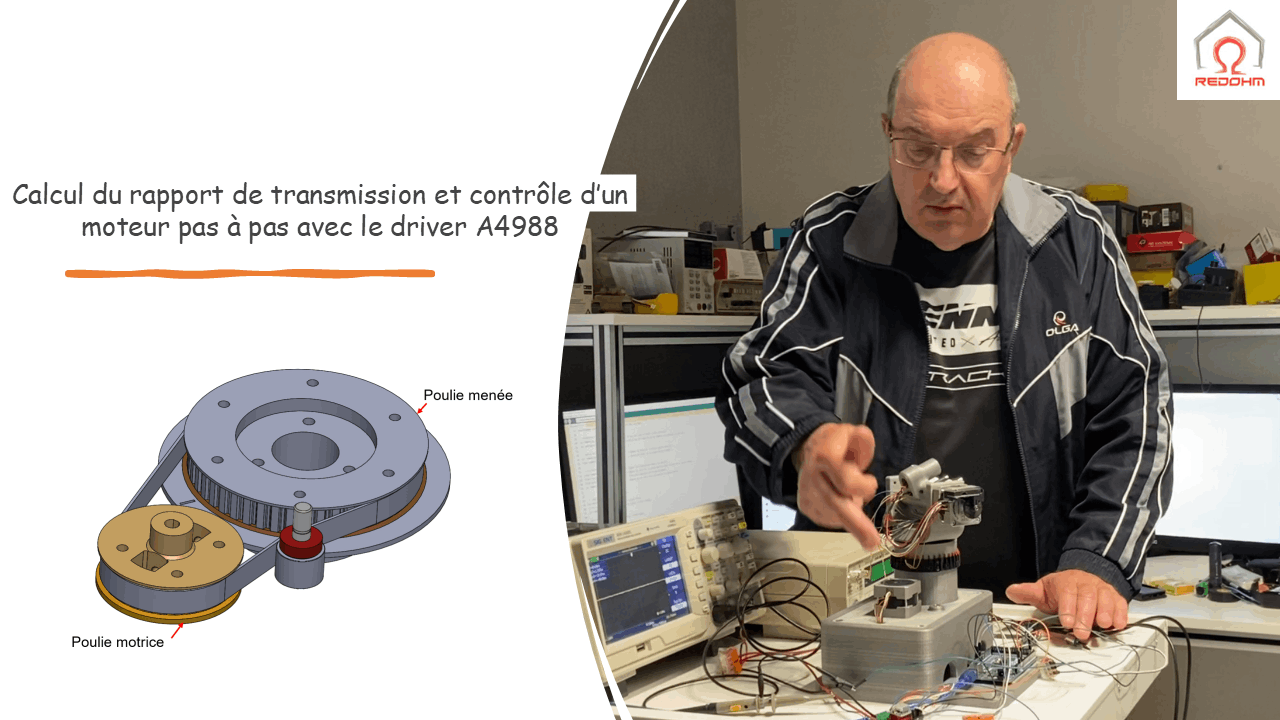
Dans ce tutoriel vidéo, nous vous guidons à travers le processus de contrôle d’un moteur pas-à-pas en utilisant un driver A4988 et une carte Arduino. Ce guide est particulièrement conçu pour ceux qui cherchent à comprendre et à maîtriser les concepts de calcul de transmission, de contrôle d’angle, et de répétition de mouvements cycliques dans des applications mécaniques et robotiques.
Ce que vous apprendrez.
Au fil de cette vidéo, nous explorons plusieurs aspects essentiels pour le contrôle précis d’un moteur pas-à-pas :
- Calcul du Rapport de Transmission :
- Apprenez à calculer le rapport de transmission entre deux poulies pour déterminer la relation de vitesse entre une poulie motrice et une poulie menée.
- Comprenez comment ce rapport influence le mouvement global du système mécanique.
- Calcul de l’Angle de Rotation :
- Découvrez comment définir et calculer l’angle de rotation demandé pour un moteur pas-à-pas, en tenant compte des caractéristiques du système comme le nombre de dents des poulies et les paramètres du driver.
- Maîtrisez l’utilisation des formules pour convertir un angle en nombre de pas, assurant ainsi un contrôle précis du mouvement.
- Répétition de l’Angle de Rotation :
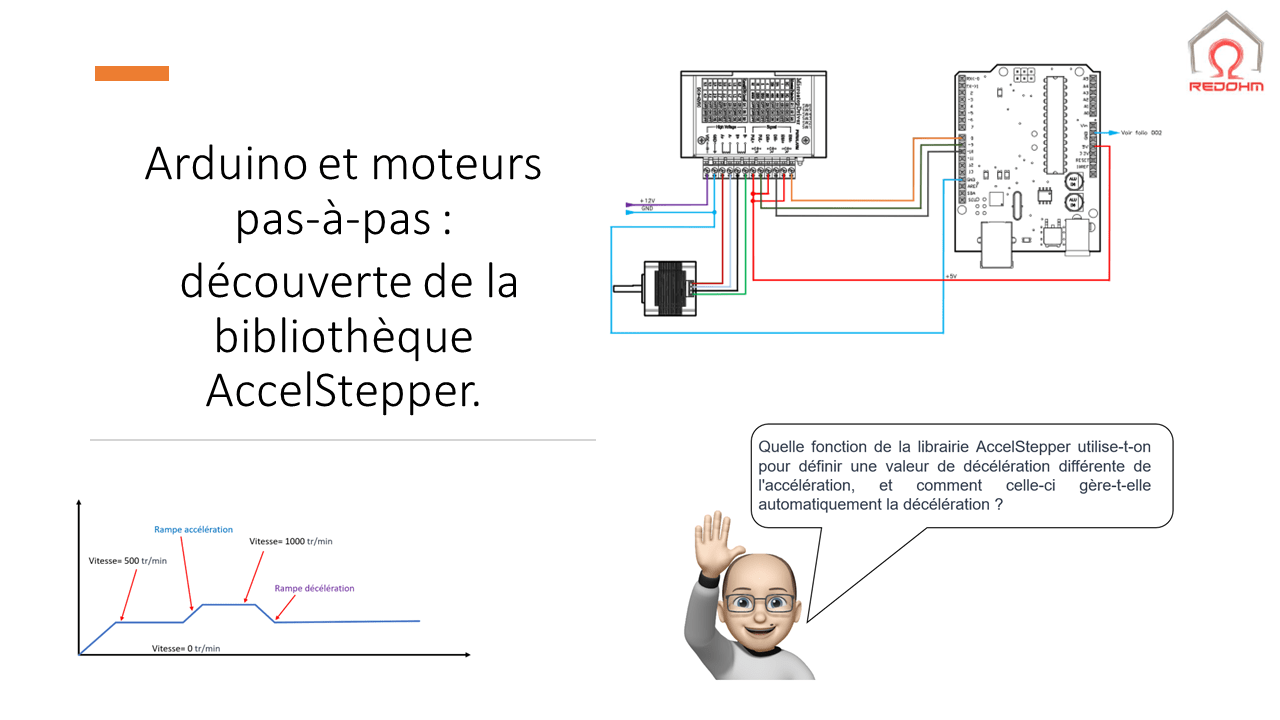
- Apprenez à configurer des cycles d’aller-retour du moteur, permettant de répéter un angle de rotation de manière précise et répétitive.
- Explorez comment utiliser un bouton-poussoir pour déclencher ces cycles, offrant ainsi un contrôle manuel sur le mouvement du moteur.
-
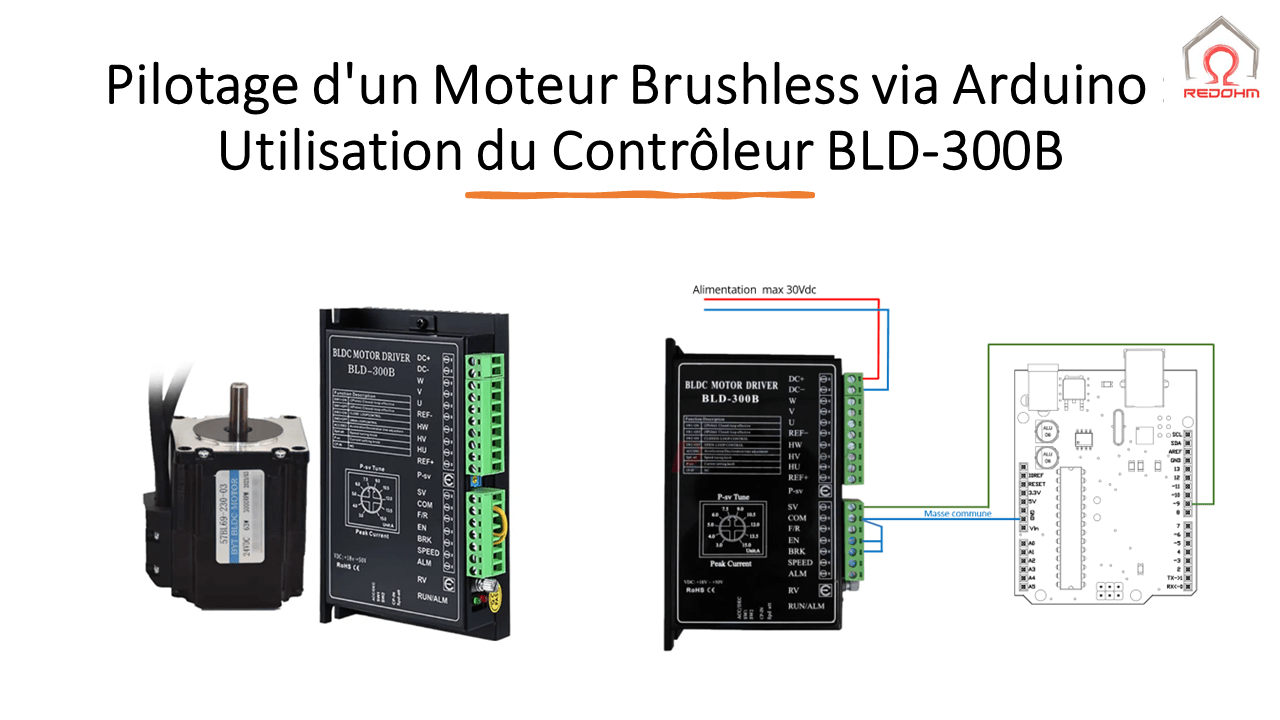
Utilisation d’un Driver A4988 :
- Familiarisez-vous avec le driver A4988, un composant clé pour contrôler un moteur pas-à-pas. Ce tutoriel vous montre comment configurer ce driver, ajuster la vitesse et l’accélération, et garantir que le moteur fonctionne dans les limites sécurisées.
Pourquoi suivre ce tutoriel ?
Ce tutoriel est idéal pour les amateurs de robotique, les ingénieurs et les bricoleurs qui souhaitent :
- Comprendre les principes fondamentaux du contrôle des moteurs pas-à-pas.
- Acquérir des compétences pratiques en calcul de transmission et en programmation Arduino.
- Appliquer ces connaissances dans des projets concrets, tels que des bras robotisés, des machines CNC, ou d’autres systèmes automatisés nécessitant des mouvements précis et contrôlés.
![]()
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celles qui vous intéressent .