–
Mise à jour le 03/11/2019 . Dans cet article vous trouverez les caractéristiques principales de driver de moteur à pas utilisé par RedOhm .
Sommaire :
- Présentation d’un driver de moteur pas à pas
- Driver Big EasyDriver 2A maxi avec refroidisseur
- Présentation du driver
- Description du driver Big EasyDriver
- Commande moteur pas-à-pas DRI0043 3.5A maxi
- Driver de moteur pas-à-pas DM432C de 1.31A à 3.2A maxi
- Driver DM860 de 2.4A à 7.2A maxi
- Retour au sommaire.
.
Retour au sommaire.
![]()
Présentation d’un driver de moteur pas à pas |
Une commande de moteur ou un driver de moteur : C’est un ensemble qui entre le moteur et l’utilisateur qui permet de convertir des signaux électriques pour que le moteur puisse les interpréter.
Un Driver pilotant un moteur pas à pas peut se diviser en 2 fonctions :
L’alimentation du moteur avec ses contraintes de tensions, courants et puissances à dissiper ainsi que la protection contre les surtensions et les surintensités. C’est l’électronique de puissance.
Le séquenceur qui gère la chronologie des impulsions :
- Du sens de rotation désiré du moteur.
- De la vitesse du moteur
- De mise en sécurité du driver
A savoir:
La vitesse de rotation et le couple des moteurs pas-à-pas dépendent de la tension d’alimentation et de l’inductance (ou du courant). Une faible inductance donne un faible couple mais permet d’atteindre des vitesses plus élevées. A contrario, une inductance élevée procure un couple élevé à basse vitesse.
Le choix de l’alimentation est primordial. Si l’application nécessite une faible vitesse, il est préférable d’utiliser une tension d’alimentation proche du minimum possible, ce qui diminue le bruit et l’échauffement et augmente le couple. Une tension d’alimentation élevée donnera une grande vitesse mais au prix de plus de bruit, d’échauffement et de possibles vibrations à basse vitesse.
Il est possible d’utiliser des alimentations continues régulées ou simplement redressées et filtrées. Lors de l’utilisation d’une alimentation régulée, il faut prévoir une réserve de puissance suffisante (par exemple prévoir 4 A pour un courant de 3 A). La tension conseillée pour alimenter le driver devrait être entre 3 fois et 25 fois la tension nominale du moteur.
–
Retour au sommaire.
![]()
Commande de pas-à-pas Big EasyDriver |
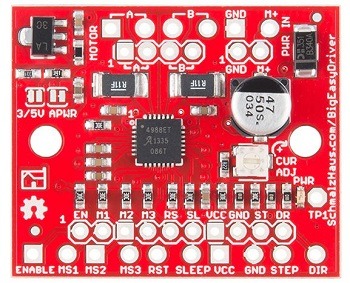 La carte de commande Big Easy Driver permet de contrôler facilement un moteur pas-à-pas bipolaire jusqu’à 2 A par phase. Une seule source d’alimentation est nécessaire car le module intègre un régulateur 5 V/3,3 V.
La carte de commande Big Easy Driver permet de contrôler facilement un moteur pas-à-pas bipolaire jusqu’à 2 A par phase. Une seule source d’alimentation est nécessaire car le module intègre un régulateur 5 V/3,3 V.
Elle est basée sur le circuit Allegro A4988 et permet de contrôler un moteur pas-à-pas très facilement à partir d’un microcontrôleur (une broche pour la direction et une pour la vitesse). Le module permet de fonctionner en mode pas complet, demi-pas, quart de pas, 1/8 de pas et 1/16 de pas (mode par défaut).
Description du driver :
- Alimentation moteur: 8 à 30 Vcc maxi
- Intensité: 2 A/phase maxi (1,4-1,7 A sans refroidisseur)
- Réglage intensité: 0 à 2 A
- Régulateur 5 V/3,3 V intégré
- Driver microstepping
- Dimensions: 36 x 30 mm
- Référence Sparkfun: ROB-12859 (remplace ROB-11876)
.
![]()
Commande moteur pas-à-pas DRI0043
|
Présentation :

Commande moteur pas-à-pas DRI0043
Module économique TB6600 permettant de commander un moteur pas-à-pas bipolaire jusqu’à 3,5 A RMS à partir de 3 sorties digitales d’un microcontrôleur (Arduino par exemple).
Ce driver fonctionne en pas complet, 1/2 pas, 1/4 de pas, 1/8 de pas, 1/16 de pas et 1/32 de pas (sélection par dip-switches).
A savoir :
Les connecteurs sont débrochables mais ne doivent pas être enlevés ou raccordés lorsque l’alimentation est branchée en raison de la force contre-électromotrice qui peut endommager le driver.
Description du driver :
- Tension d’alimentation: 9 à 42 Vcc
- Consommation maxi: 5 A (en fonction du moteur)
- Réglage courant: 0,5 A – 1 A – 1,5 A – 2 A – 2,5 A – 2,8 A – 3 A et 3,5 A
- Puissance: 160 W
- Réglage pas: 1, 2/A – 2/B – 4 – 8 – 16 – 32
- Température: -10 à 45°C
- Poids: 0,2 kg
- Dimensions: 96 x 71 x 37 mm
- Référence DFRobot: DRI0043
Fournisseur : Gotronic
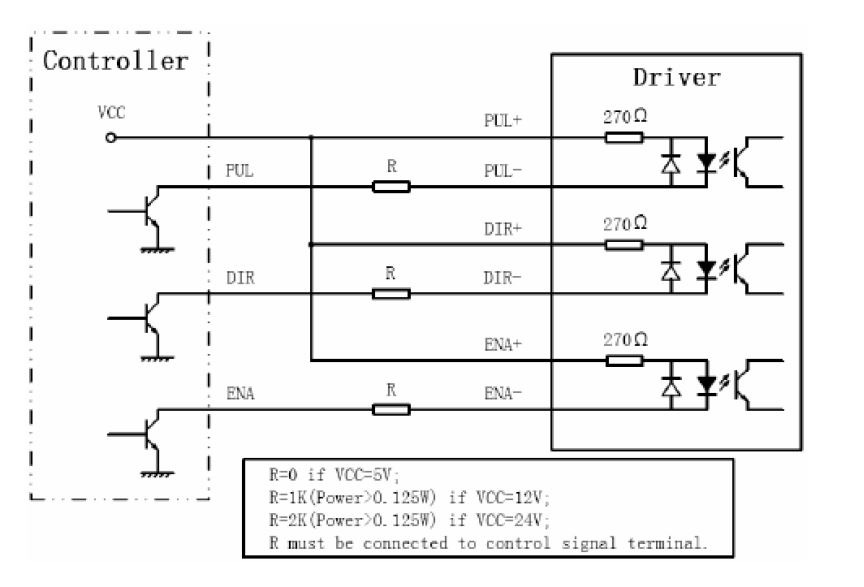
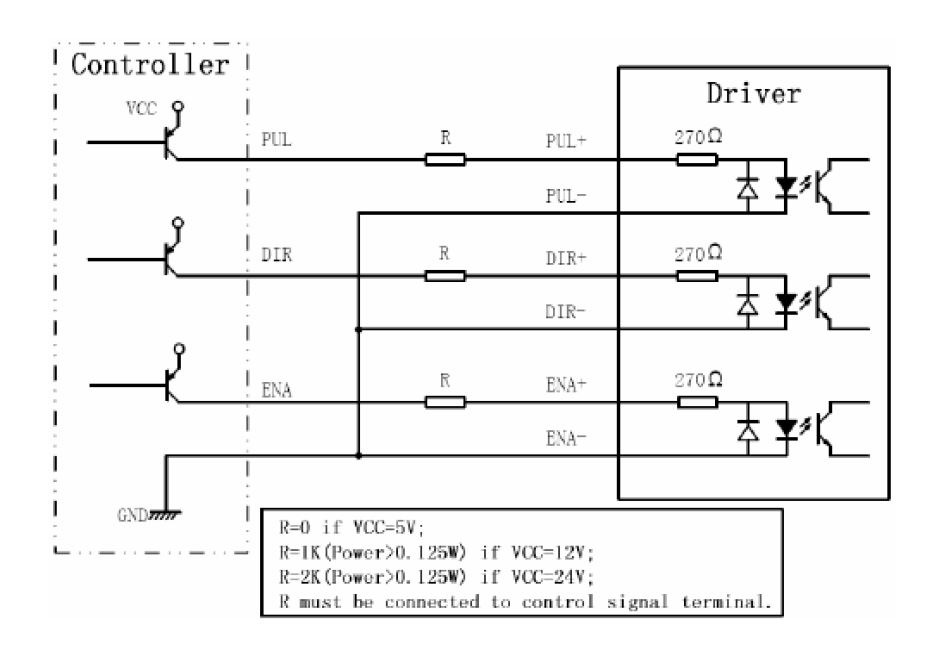
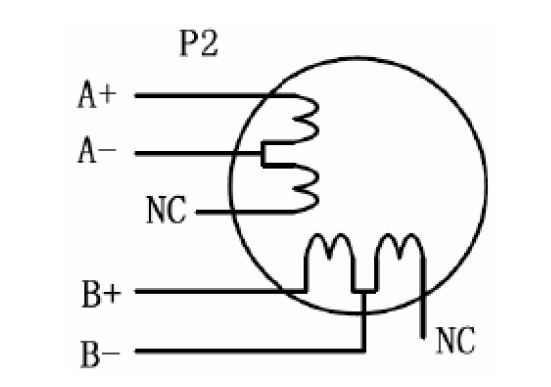
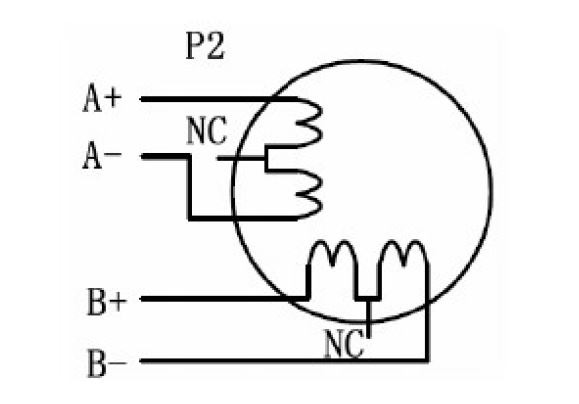
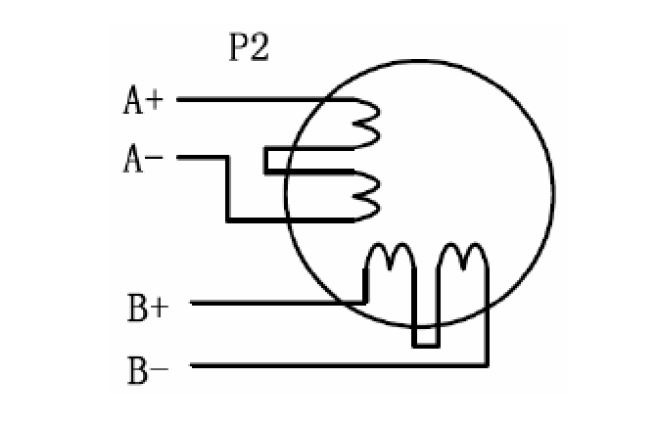
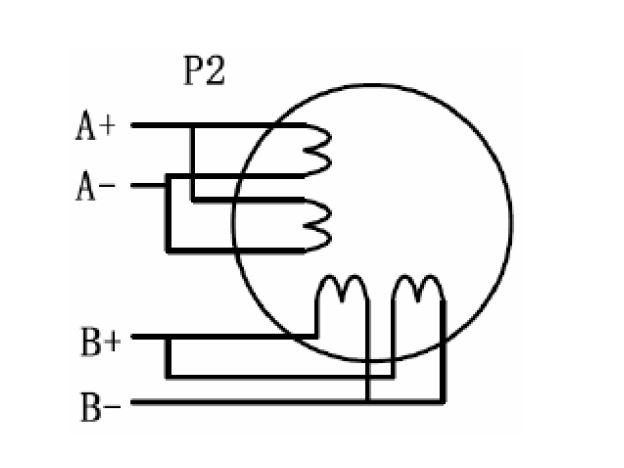
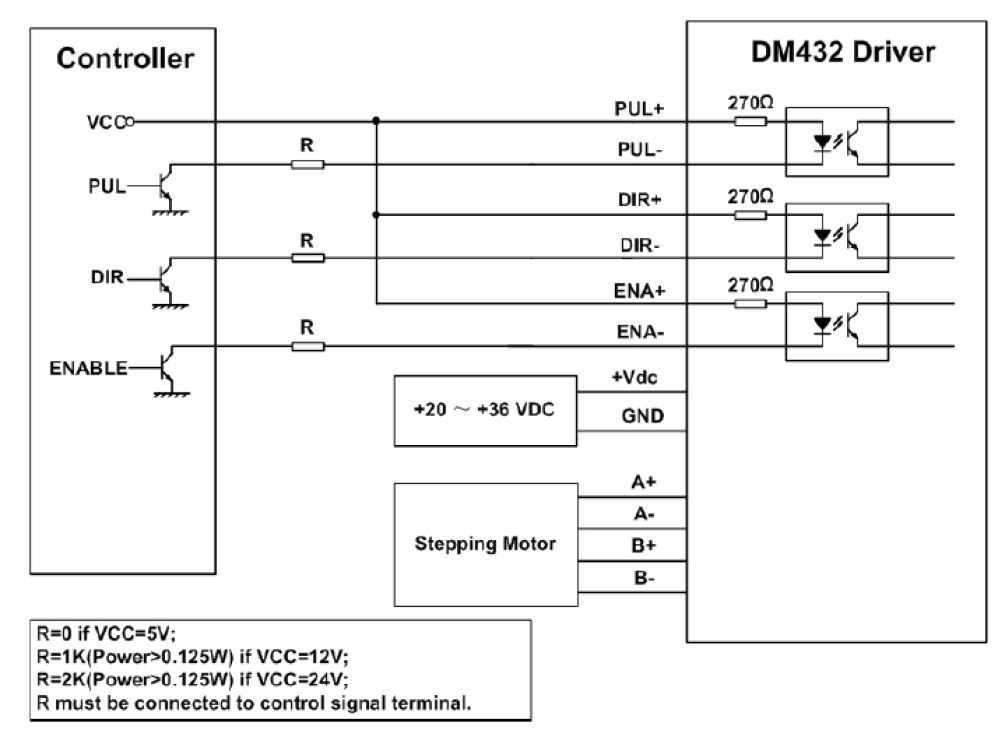
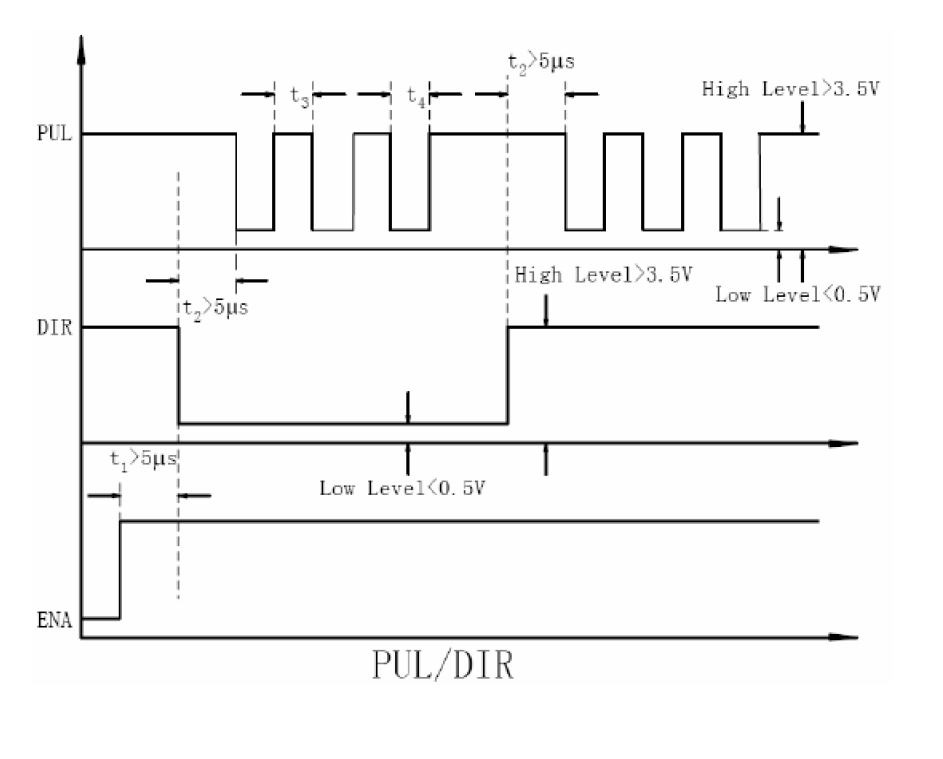
Schéma de câblage de principe :
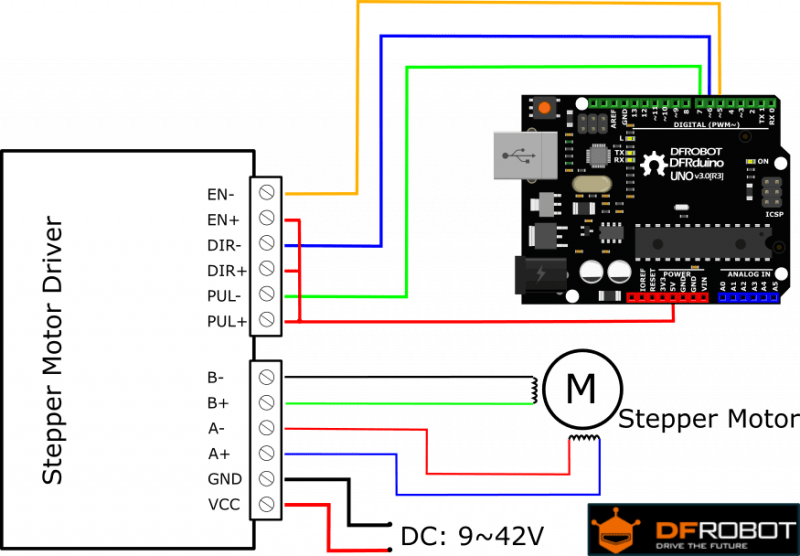
Schéma de câblage de principe , du driver DRI0043
.
![]()
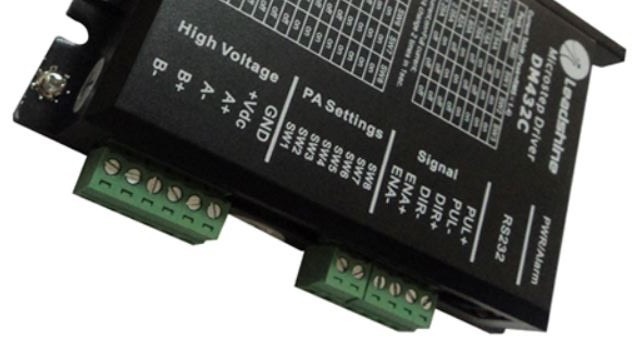
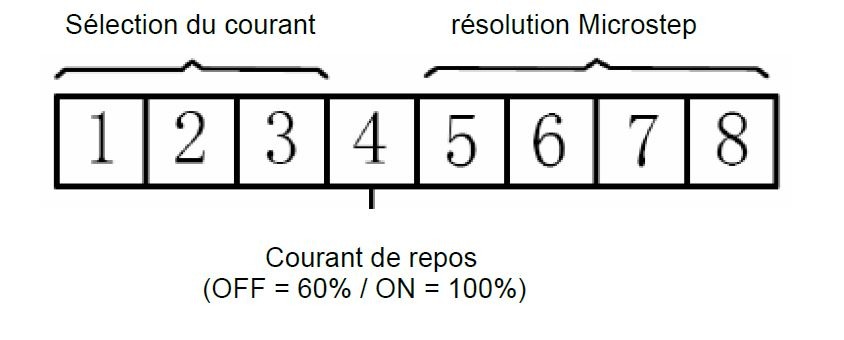
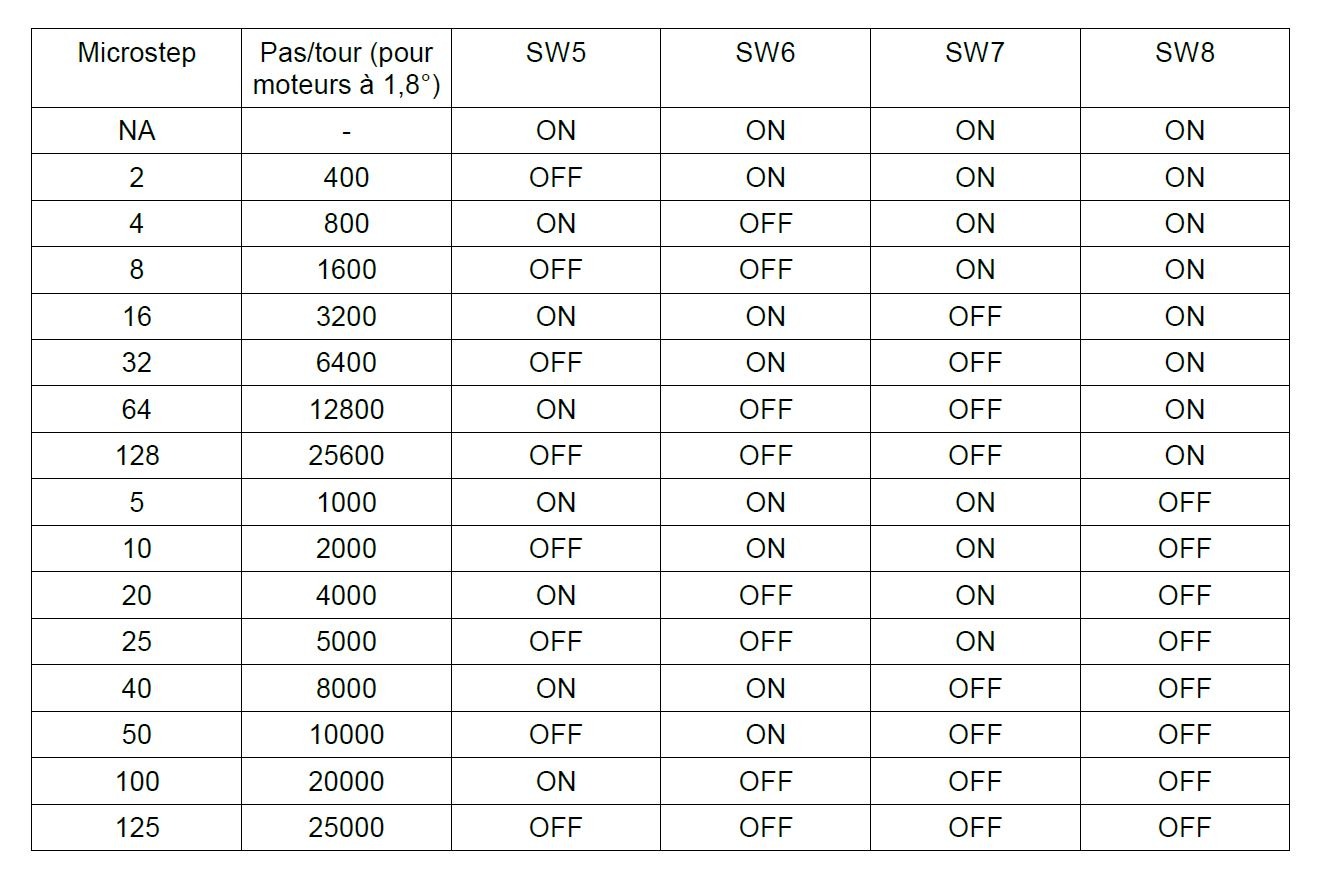
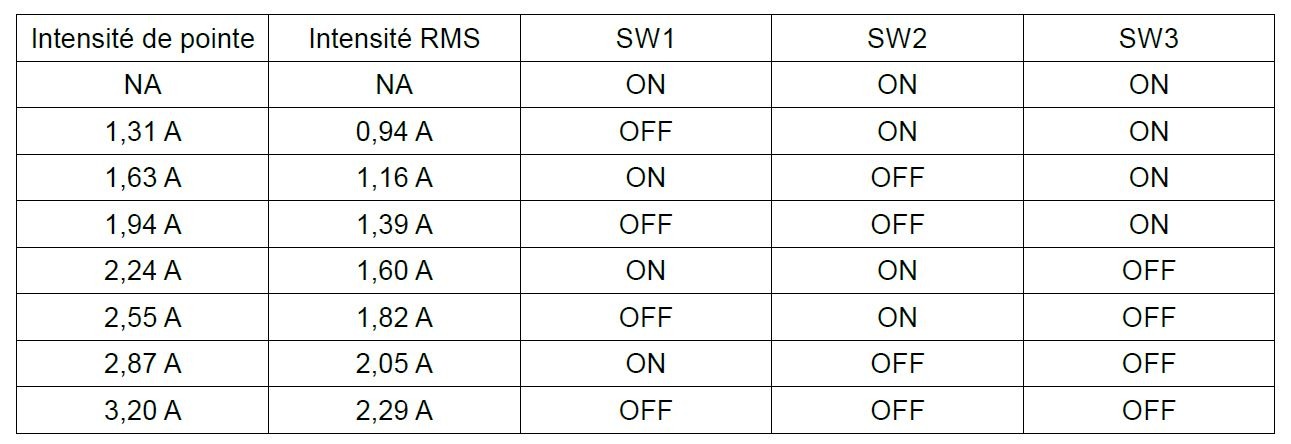
Driver de moteur pas-à-pas DM432C |

Driver de moteur pas-à-pas DM432C
Le DM432C de Leadshine est un module digital de commande de moteur pas-à-pas procurant un mouvement fluide à basse vitesse, un couple optimum, un faible échauffement et un faible bruit de fonctionnement. Son mode de fonctionnement est en demi-pas et il accepte les micro-pas.
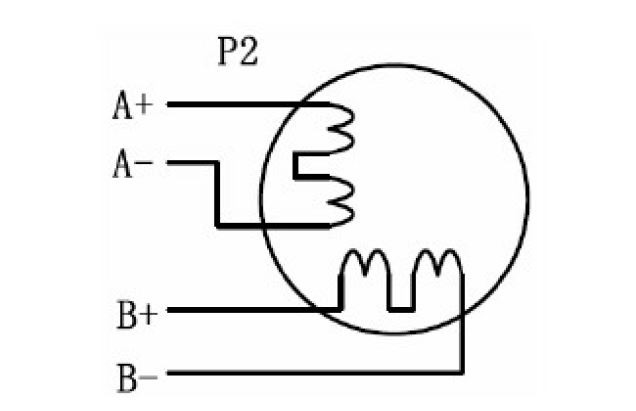
Il convient pour les moteurs bipolaires ou unipolaires 6 fils (half coil ou full coil) de la série NEMA 14 à 23 et sa fonction multistep permet d’atteindre des résolutions très élevées.
A savoir:
Les connecteurs sont débrochables mais ne doivent pas être enlevés ou raccordés lorsque l’alimentation est branchée en raison de la force contre-électromotrice qui peut endommager le driver.
- Plus d’information sur le Driver DM432C
- Moteur compatibles avec le driver DM432C
.
![]()
Driver de moteur pas-à-pas DM860 |

Le DM860 de Leadshine est un module digital de commande de moteur pas-à-pas procurant un mouvement fluide à basse vitesse, un couple optimum, un faible échauffement et un faible bruit de fonctionnement. Son mode de fonctionnement est en demi-pas et il accepte les micro-pas.
- Plus d’information sur le Driver DM860
Quelques moteurs compatibles pour le Driver DM860
- Moteur 34HS31-5504S :Moteur pas-à-pas bipolaire de taille Nema 34 présentant un couple important de 4,5 Nm, une grande précision et des niveaux de vibrations et de bruits faibles.
- Nombre de pas: 200
- Angle par pas: 1,8°
- Alimentation: 2,2 V
- Résistance/phase: 0,4 ohms
- Courant/phase: 5,5 A
- Inductance/phase: 3,5 mH
- Couple de maintien: 45,8 kg.cm
- Connexion: 4 fils
- Dimensions de l’axe: Ø14 x 35 mm
- Dimensions: 81 x 81 x 79 mm
- Poids: 2,3 kg
- Moteur 57STH56R : Moteur pas-à-pas bipolaire de taille Nema 23 présentant un couple de 11,2 kg.cm. Il est équipé d’un axe arrière de 3,8 mm permettant le montage d’un encodeur.
- Nombre de pas: 400
- Angle par pas: 0,9°
- Alimentation recommandée: 12 V
- Résistance/phase: 900 mΩ
- Courant/phase: 2,8 A
- Couple de maintien: 12 kg.cm
- Couple: 11,2 kg.cm
- Connexion: 4 fils
- Dimensions de l’axe: Ø6,35 x 19 mm
- Dimensions de l’axe arrière: Ø3,8 x 13 mm
- Dimensions: 56 x 56 x 56 mm
.
Retour au sommaire.
![]()