
Découvrez la richesse de l’univers des moteurs pas-à-pas avec notre gamme complète de tutoriels. De l’introduction des principes fondamentaux du pilotage à l’exploration de techniques plus avancées, chaque ressource a été conçue pour vous aider à maîtriser cette technologie fascinante. ( mise à jour le 15/02/2025)
Sommaire :
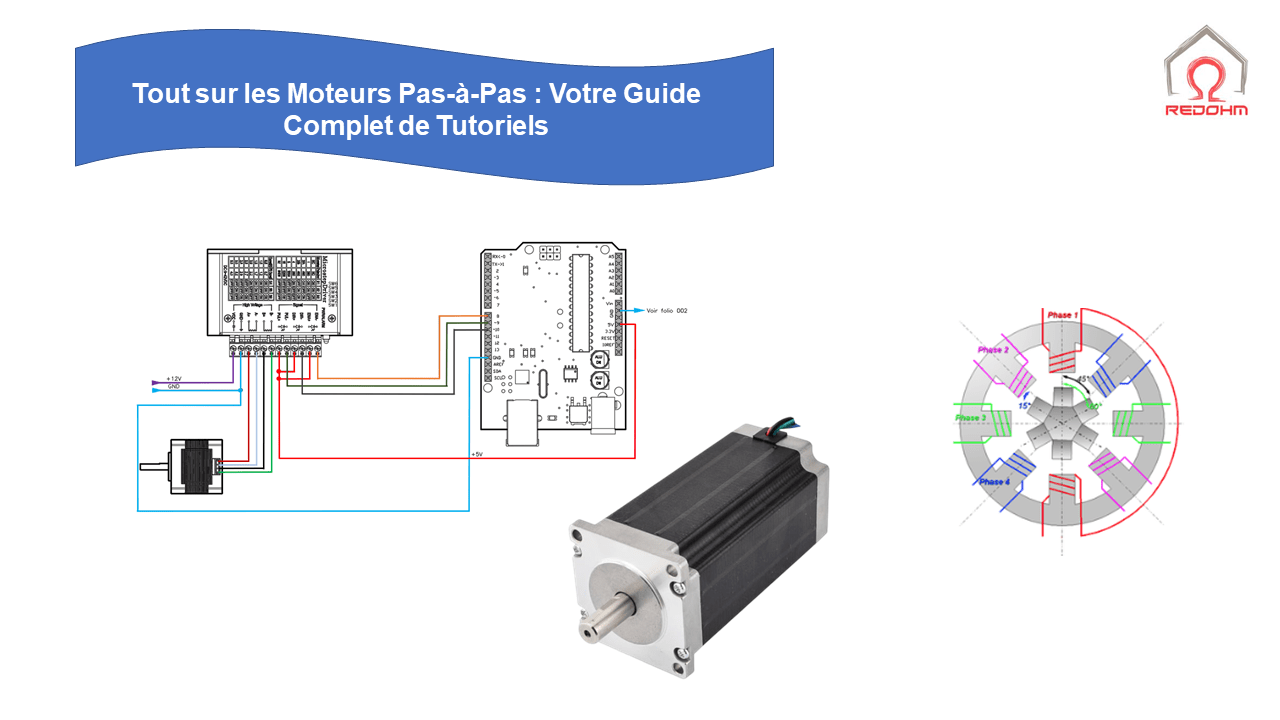
- le cablage des moteurs pas a pas (2019/06/10)
- Comment utiliser simplement un moteur pas a pas avec Arduino (2022/02/04)
- Principe de pilotage d’un moteur pas à pas avec Arduino (2021/02/24)
- Pilotage d’un moteur pas a pas avec un joystick
- Arduino et les moteurs pas a pas avec frein
- Création du train d’impulsion pour un moteur pas à pas avec Arduino
- Contrôle de vitesse et de direction d’un moteur pas-à-pas avec Arduino
- Faire tourner un moteur pas-à-pas à l’angle souhaité
- Piloter un moteur pas à pas sans microcontroleur : Module MKS OSC V1
- Carte Multimode pour Moteur Pas-à-Pas : Le mode aller-retour
- Presentation du driver pour moteur pas a pas Pololu 3133 ou tic t834
- Pilotage d’un moteur pas pas en I2C avec le driver pololu 3133 ou TIC T834 sur Arduino
- Intégration du capteur angulaire AS5600 pour vos projets de moteur pas à pas.
- Guide Pratique pour une Accélération Maîtrisée d’un Moteur Pas-à-Pas avec Arduino
- Arduino et moteurs pas-à-pas : découverte de la bibliothèque AccelStepper.
- Démarrage sûr et contrôle d’angle avec AccelStepper pour moteur pas à pas.
- stepper.setMaxSpeed : Clé du Contrôle de Vitesse dans AccelStepper pour moteur pas à pas.
- Contrôle de Moteur Pas-à-Pas par Lecture de Roue Codeuse avec Arduino
- Questions concernant les moteurs pas-à-pas.
- Quels critères déterminent le choix entre un câblage en logique positive ou négative pour un driver de moteur pas-à-pas, et quel impact cela a-t-il sur la programmation Arduino ?
- Importance de la Gestion de l’Accélération dans les Systèmes de Moteurs Pas-à-Pas.
Nos tutoriels vous guident à travers les subtilités du câblage de moteurs, les méthodes pour les utiliser efficacement avec Arduino, et même l’expérimentation de contrôle avec un joystick. Vous apprendrez également comment créer un train d’impulsion pour un moteur pas-à-pas, comment contrôler sa vitesse et sa direction, et comment l’amener à tourner à l’angle précis que vous souhaitez.
De plus, nous mettons en avant l’utilisation de matériel spécifique comme la carte multimode pour moteur pas-à-pas, le driver Pololu 3133 ou tic t834, et le capteur angulaire AS5600.
Ainsi, cette série de tutoriels constitue votre ressource complète pour maîtriser les moteurs pas-à-pas. De l’apprentissage des fondamentaux à l’exploration des techniques plus sophistiquées, nos guides sont là pour vous accompagner à chaque étape. Prêt à propulser vos projets d’électronique et de programmation à un niveau supérieur avec les moteurs pas-à-pas ? Débutez votre voyage d’apprentissage dès aujourd’hui et débloquez le potentiel illimité de cette technologie captivante !
– Questions concernant les moteurs pas-à-pas –
Quels critères déterminent le choix entre un câblage en logique positive ou négative pour un driver de moteur pas-à-pas, et quel impact cela a-t-il sur la programmation Arduino ?
Il est important de savoir que la manière dont on active le driver d’un moteur pas-à-pas dépend largement du câblage que nous réalisons sur celui-ci. Cet aspect, souvent sous-estimé mais crucial des drivers de moteurs, offre une flexibilité notable dans le câblage, en particulier dans la façon dont la broche ENA (Enable) est configurée. Il est essentiel de comprendre que lorsque l’on opte pour un certain type de câblage, ce choix s’applique à l’ensemble des trois bornes principales du driver : ENA (Enable), DIR (Direction) et PUL (Pulse). Cette configuration globale détermine non seulement comment le driver est activé, mais aussi comment il interprète les signaux de direction et de pulsation.
Logique Positive vs. Logique Négative
La flexibilité du câblage se manifeste principalement dans le choix entre une logique positive et une logique négative pour la broche ENA :
Logique Positive : Dans cette configuration, un signal HIGH (niveau de tension élevé) sur la broche ENA active le driver, tandis qu’un signal LOW le désactive. Cette approche est intuitive et souvent privilégiée dans les systèmes où un signal positif est synonyme d’activation.
Logique Négative : À l’inverse, un signal LOW sur ENA active le driver, tandis qu’un signal HIGH le désactive. Cette configuration peut être préférée pour des raisons de sécurité, car elle assure que le driver reste désactivé en cas de déconnexion accidentelle ou de panne du système de contrôle.
Considérations sur le Câblage et la Configuration
Choisir entre ces deux logiques de câblage implique de comprendre non seulement le matériel spécifique en question, mais aussi les exigences de l’application concernée. La documentation technique du driver est un outil inestimable pour naviguer dans ces choix et pour effectuer un câblage correct et sûr.
Adaptabilité dans la Programmation Arduino
La manière dont le driver est câblé doit se refléter dans le code de programmation, notamment lors de l’utilisation de plateformes comme Arduino. Par exemple, un code configuré pour un driver en logique positive activera le driver avec digitalWrite(ENA_PIN, HIGH);, tandis qu’avec un driver en logique négative, la même action nécessitera digitalWrite(ENA_PIN, LOW);.
Pour une plus grande adaptabilité, il est judicieux d’introduire dans le code Arduino une variable ou un paramètre indiquant la logique de câblage utilisée. Cette approche permet une modification rapide et facile du code en cas de changement de driver ou de modification de la configuration.
Pourquoi est-il crucial de bien gérer l’accélération dans les systèmes de contrôle de moteurs pas-à-pas, toutes plateformes et bibliothèques confondues, afin d’éviter les décrochages et d’assurer un fonctionnement optimal ?
Prévention des Décrochages :
Un décrochage se produit lorsque le moteur ne parvient pas à suivre la vitesse demandée, souvent en raison d’une accélération trop rapide ou d’une charge excessive.En définissant une accélération appropriée, vous assurez que le moteur augmente sa vitesse graduellement, ce qui permet au moteur de gérer efficacement les changements de vitesse sans être dépassé, évitant ainsi les décrochages.
Réduction des Mouvements Saccadés :
Les mouvements saccadés ou non fluides se produisent souvent lorsque le moteur change de vitesse brusquement.Une accélération bien définie assure une transition en douceur entre les vitesses. Cela signifie que le moteur accélère et décélère progressivement, ce qui se traduit par un mouvement plus fluide et régulier.
Gestion de la Dynamique du Moteur :
Chaque moteur a ses propres caractéristiques en termes d’inertie et de couple. L’accélération doit être adaptée à ces caractéristiques pour optimiser les performances.Une accélération trop élevée peut dépasser le couple disponible, tandis qu’une accélération trop faible peut rendre les réponses du moteur trop lentes.
Cobot Oryon Tuto pour le cablage des moteurs pas a pas |
.
Mise à jour le : 10/06/2019
.
Retour au sommaire
2022/02/04,Comment utiliser simplement un moteur pas a pas avec Arduino |
.
Ce tutoriel vise à simplifier au maximum le fonctionnement d’un moteur pas-à-pas. Nous vous guidons à travers l’utilisation d’un bouton pour sélectionner la direction de rotation – marche avant ou marche arrière – et d’un potentiomètre pour régler la vitesse du moteur selon vos besoins.
Le tutoriel est structuré en trois étapes essentielles pour une meilleure assimilation :
-
Présentation du fonctionnement du montage : Nous vous expliquons comment exploiter le moteur pas-à-pas de la façon la plus simple possible. Cette phase vous permettra d’acquérir une compréhension approfondie de l’assemblage et de ses composants.
-
Explication du schéma de câblage : Dans cette partie, nous vous guidons à travers le processus de câblage du driver et du moteur pas-à-pas. Nous vous fournissons des instructions détaillées et claires pour garantir un câblage réussi et sécurisé.
-
Explication du programme sur Arduino : Nous concluons avec une présentation détaillée de la programmation Arduino nécessaire pour faire fonctionner le driver et le moteur pas-à-pas. Nous déchiffrons le code ligne par ligne pour vous aider à comprendre chaque aspect du programme.
Le pilotage du moteur pas-à-pas est simplifié grâce à l’utilisation d’un interrupteur inverseur et d’un potentiomètre. Suivez ce tutoriel pas-à-pas pour prendre en main facilement vos projets impliquant des moteurs pas-à-pas et donnez vie à vos idées
.
Retour au sommaire
Principe de pilotage d’un moteur pas à pas avec Arduino |
.
.
Retour au sommaire
Pilotage d’un moteur pas a pas avec un joystick
|
.
.
Retour au sommaire
Arduino et les moteurs pas a pas avec frein
|
.
.
Retour au sommaire
TB6600 1/8, La création du train d’impulsion pour un moteur pas à pas avec Arduino |
.
Vidéo démontrant la commande d’un moteur pas-à-pas via une carte Arduino et un driver TB6600. Dans cette démonstration, les broches ENA, PULS et DIR sont utilisées pour générer des impulsions électriques qui contrôlent les mouvements du moteur. La fonction ‘setup()’ initialise ces broches comme sorties, tandis que la fonction ‘loop()’ émet des impulsions à une fréquence ajustable pour réguler la vitesse du moteur. Le code est conçu pour être facilement personnalisable, permettant l’ajout de fonctionnalités supplémentaires selon vos besoins.
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
.
Retour au sommaire
TB6600 2/8, Contrôle de la vitesse et de la direction d’un moteur pas-à-pas avec Arduino |
.
Dans ce tutoriel, nous allons apprendre comment contrôler la vitesse et la direction d’un moteur pas-à-pas à l’aide d’un Arduino et d’un driver type TB6600. Nous allons voir comment lire les données entrées sur le port série et comment utiliser la bibliothèque « Serial » pour les traiter. Nous allons également expliquer en détail chaque ligne de code utilisée pour ce projet.
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire
TB6600 5/8, Faire tourner un moteur pas-à-pas à l’angle souhaité ( 24/05/2023) |
.
Mise à jour le : 24/05/2023
Dans cette vidéo, nous mettons l’accent sur le contrôle précis d’un moteur pas-à-pas avec Arduino, permettant une rotation à l’angle souhaité. Grâce à un code clairement commenté, nous démontrons comment réaliser une telle précision. Joignez-vous à nous pour ce tutoriel pratique et enrichissez vos connaissances en programmation Arduino !
✔️ Descriptif : Ce code Arduino est conçu pour contrôler un moteur pas à pas en fonction d’un angle de rotation spécifié. Le moteur est contrôlé à l’aide de trois broches : ENA_PIN pour l’activation du moteur, PULS_PIN pour les impulsions de contrôle, et DIR_PIN pour déterminer le sens de rotation. Une broche supplémentaire, BOUTON_PIN, est utilisée pour lire l’état d’un bouton qui active ou désactive le moteur, et une LED, contrôlée par LED_PIN, indique si le moteur est en fonctionnement.
L’angle de rotation est défini par la variable ‘angle’, et la fonction ‘ConversionAngleEnTour’ convertit cet angle en nombre de pas que le moteur doit effectuer. Ceci est basé sur la résolution du moteur, qui est définie comme le nombre de pas que le moteur doit effectuer pour effectuer une rotation complète. Dans ce cas, la résolution est définie à 800 pas par tour ( 400* 1/2 Step).
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire
Comment piloter un moteur pas à pas sans microcontroleur avec le module MKS OSC V1 |
.
Mise à jour le : 02/03/2023
Dans cette vidéo, nous allons vous présenter le module MKS OSC V1, qui est une carte dédiée au pilotage de drivers pour moteurs pas à pas. Cette carte nous permet de piloter les fonctions Enable, Dir et Puls sans avoir à programmer un microcontrôleur. Dans cette vidéo, le module MKS OSC V1 est associé à un driver TB6600.
Vous avez une présentation de deux schémas vous expliquant le câblage de base de cette carte, ainsi qu’un schéma de câblage vous permettant une utilisation de cette carte en mode semi-automatique simplement par câblage.
✔️Ce type de matériel peut être utilisé pour piloter, par exemple : – le déplacement d’une table longitudinale ou transversale d’une fraiseuse, moyennant bien évidemment le câblage approprié. – pour le déplacement d’un télescope, facilitant ainsi le mouvement sur les axes de coordonnées horizontales et verticales (également appelé mouvement en azimut et en élévation).
Modes de fonctionnement du TB6600 : Il offre plusieurs modes de fonctionnement tels que le mode 1/1, le mode 1/2, le mode 1/4, le mode 1/8, le mode 1/16 et le mode 1/32. Ces modes de fonctionnement déterminent la résolution du moteur pas à pas. Protection : le TB6600 est équipé d’une protection contre les surintensités, les surtensions, les sous-tensions et les surchauffes pour assurer une utilisation sûre et fiable. Interface de commande : le TB6600 peut être contrôlé à l’aide d’une interface de commande à 3 ou 4 fils, ce qui le rend compatible avec une variété de microcontrôleurs tels que Arduino, Raspberry Pi et autres.
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire
Carte Multimode pour Moteur Pas-à-Pas : Simplifiez Vos Projets Le Mode aller-retour automatique |
.
Mise à jour le : 02/05/2023
Nous vous présentons une carte multimode pour moteur pas-à-pas, qui possède 4 modes de fonctionnement et permet de résoudre une multitude de problèmes. Elle n’a pas besoin de driver, cependant, elle est limitée à 800 mA
✔️ Descriptif : Cette carte multimode ne nécessite pas de programmation, car tout fonctionne électroniquement sans aucune ligne de code. Elle dispose de 4 modes de fonctionnement, dont voici le détail pour chacun d’entre eux :
[1] Mode : Utilisez le bouton S1 pour démarrer/arrêter, et le bouton S2 pour changer la direction (avant/arrière). La vitesse est contrôlée par le potentiomètre W2. Si une inversion de limite est nécessaire, connectez deux interrupteurs de fin de course à la broche P3. Montez les contacts sur l’arbre de mouvement du moteur, de sorte que le moteur se déplace entre les deux interrupteurs de fin de course pour contrôler sa course.
[2] Mode : Appuyez sur le bouton S1 pour démarrer le mouvement vers l’avant et sur le bouton S2 pour le mouvement vers l’arrière. Appuyez de nouveau sur l’un des boutons pour arrêter. La vitesse est réglée avec le potentiomètre W2. Si un arrêt de limite est nécessaire, connectez deux interrupteurs de fin de course à la broche P3. Le moteur s’arrêtera lorsqu’il touchera l’interrupteur de limite et s’inversera en appuyant sur le bouton opposé.
[3] Mode Jog : En appuyant sur le bouton S1, le moteur tourne vers l’avant et s’arrête lorsque le bouton est relâché. De même, en appuyant sur le bouton S2, le moteur tourne en sens inverse et s’arrête lorsqu’il est relâché. La vitesse est ajustée à l’aide du potentiomètre W2. Si un arrêt de limite est nécessaire, l’interrupteur de limite supérieur peut être connecté à la broche P3.
[4] Mode aller-retour automatique : Le bouton S1 permet de démarrer et d’arrêter, tandis que le bouton S2 inverse la direction. La vitesse est réglée à l’aide du potentiomètre W2, et le potentiomètre W1 ajuste le nombre de pas pour les mouvements aller-retour automatiques. Une fois démarré, le moteur effectue automatiquement des rotations d’avant en arrière selon le nombre de pas déterminé par W1
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire
Presentation du driver pour moteur pas a pas Pololu 3133 ou tic t834 |
.
Mise à jour le : 28/04/2022
Nous allons étudier l’ensemble des fonctions du driver Tic T834 ou sous la référence Pololu 3133. Cette carte de commande multi-interfaces basée sur un circuit DRV8834 permettant le contrôle d’un moteur pas-à-pas bipolaire. Ce driver peut être commandé via plusieurs interfaces telles que USB, I2C, série TTL, signal RC, analogique, etc et nécessite l’utilisation d’un logiciel disponible en téléchargement pour la configuration.
Cette carte dispose de plusieurs modes de fonctionnement « microsteps »: pas complet, demi-pas, quart de pas, 1/8 de pas, 1/16 de pas ou 1/32 de pas. La vitesse maximale peut être de 50 000 pas/seconde et la vitesse minimale jusqu’à 1 pas toutes les 200 secondes.
Interfaces de contrôle :
- USB pour connexion directe à un ordinateur
- Série TTL fonctionnant à 5 V pour une utilisation avec un microcontrôleur
- I²C à utiliser avec un microcontrôleur
- Impulsions de servo de loisir RC à utiliser dans un système RC
- Tension analogique à utiliser avec un potentiomètre ou un joystick analogique
- Entrée d’encodeur en quadrature à utiliser avec un cadran d’encodeur rotatif, permettant une rotation complète sans limites ( pas pour le retour de position)
- Entrées STEP/DIR pour la compatibilité avec le micrologiciel de commande de moteur pas à pas existant.
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire
Pilotage d’un moteur pas pas en I2C avec le driver pololu 3133 ou TIC T834 sur Arduino |
.
Mise à jour le : 04/05/2022
Cette vidéo vous explique comment connecter un microcontrôleur Arduino à interface I 2C du driver TIC afin que vous puissiez envoyer les commandes pour contrôler celui-ci. Attention selon votre configuration il sera peut-être nécessaire d’ajouter des résistances de rappel au ligne SCL et SDA de votre bus I2c. Pour plus d’informations, je vous joins le lien du constructeur sur ce type de problème.
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire
Pilotage d’un moteur pas pas en I2C avec le driver pololu 3133 ou TIC T834 sur Arduino |
.
Mise à jour le : 09/06/2023
Dans cette vidéo, nous allons vous présenter un tutoriel complet sur l’utilisation du capteur AS5600 avec une carte Arduino. Nous commencerons par vous expliquer le principe de fonctionnement de ce capteur et vous montrerons comment réaliser le câblage électrique pour le connecter à votre Arduino.
Nous avons également conçu un support spécifique pour fixer le capteur AS5600 à l’arrière d’un moteur pas à pas NEMA 14, ce qui facilitera son intégration dans vos projets.
Dans la deuxième partie de la vidéo, nous effectuerons des essais pratiques en manipulant l’aiguille du système d’indexe pour obtenir des mesures d’angle précises. Vous pourrez ainsi voir en direct les valeurs d’angle s’afficher sur le moniteur de l’IDE Arduino. Dans la troisième partie de notre tutoriel, nous allons vous fournir une explication détaillée du code que nous avons utilisé pour communiquer avec le capteur AS5600 et récupérer les mesures d’angle.
Tout d’abord, nous utilisons la bibliothèque « AS5600.h » qui nous permet d’interfacer facilement le capteur AS5600 avec notre Arduino. Nous incluons également la bibliothèque « Wire.h » pour gérer la communication I2C avec le capteur. Ensuite, nous déclarons différentes variables pour stocker les données nécessaires. Par exemple, la variable « positionZero » représente la position de référence à partir de laquelle nous mesurerons les angles.
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire
Guide Pratique pour une Accélération Maîtrisée d’un Moteur
|
.
Mise à jour le : 14/07/2023
Ce tutoriel met en œuvre une rampe d’accélération pour le moteur pas à pas. Activée par un bouton, elle permet au moteur d’augmenter graduellement sa vitesse, avec son état indiqué par une LED.
Ce code est destiné à contrôler un moteur pas à pas avec un Arduino, en utilisant un driver TB6600. Le code contrôle trois aspects du moteur : l’activation, la direction et la vitesse. Le contrôle du moteur est réalisé via les broches ENA (Enable), PULS (Pulse) et DIR (Direction). ENA sert à activer ou désactiver le moteur, PULS contrôle le mouvement du moteur en générant des impulsions, et DIR contrôle la direction du mouvement. L’état d’activation du moteur est contrôlé par l’état d’un bouton physique connecté à la broche Bouton_depart_cycle. Lorsque ce bouton est relâché, le moteur est activé et commence à se déplacer.
Le code utilise aussi une rampe d’accélération, qui est une façon d’augmenter progressivement la vitesse du moteur au démarrage. Lorsqu’elle est active, la rampe d’accélération modifie le délai entre les impulsions envoyées à la broche PULS, ce qui fait accélérer le moteur progressivement. L’activation de la rampe d’accélération est contrôlée par un autre bouton connecté à la broche Bouton_choix_rampe. L’état de la rampe d’accélération est aussi indiqué par une LED.
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire
Arduino et moteurs pas-à-pas : découverte de la bibliothèque AccelStepper. |
.
Mise à jour le : 05/19/2023
Découvrez la puissance et la flexibilité de la bibliothèque AccelStepper pour Arduino dans cette vidéo explicative. Nous dévoilons un code pratique mettant en lumière les fonctions essentielles de cette bibliothèque. Vous apprendrez comment piloter efficacement des moteurs pas à pas avec divers drivers comme le DM860 ou DM582. Plongez au cœur de l’accélération, de la vitesse et de la précision des moteurs pas à pas !
📘 Introduction à AccelStepper : La bibliothèque AccelStepper pour Arduino est un outil puissant pour piloter les moteurs pas à pas. Elle offre une flexibilité accrue par rapport aux solutions de base et permet des contrôles plus sophistiqués.
🌟 Avantages :
- Gestion des accélérations : Permet une montée et une descente en vitesse douce, ce qui protège le moteur et les mécanismes associés.
- Compatibilité étendue : Convient pour de nombreux types de drivers, y compris le DM860, DM582, et tout autre driver avec une connectique similaire.
- Contrôle précis : Contrôle de la position avec une précision au pas près, ainsi qu’une gestion avancée de la vitesse.
❗ Inconvénients :
- Courbe d’apprentissage : Pour les débutants, AccelStepper peut s’avérer plus complexe que certaines bibliothèques de base. Néanmoins, elle a l’avantage de gérer automatiquement le train d’impulsions, simplifiant considérablement le code.
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire
Démarrage sûr et contrôle d’angle avec AccelStepper
|
.
Mise à jour le : 27/11/2023
Ce code, intitulé « Démarrage sûr et contrôle d’angle avec AccelStepper » pour moteur pas à pas, est conçu pour un contrôle précis et fiable d’un moteur pas à pas via une pédale. Utilisant la bibliothèque AccelStepper, il permet des réglages fins de la rotation du moteur, avec la variable « valeur_de_la_rotation » offrant la possibilité de définir des angles de rotation spécifiques. Une gestion astucieuse des rebonds de la pédale assure une interaction utilisateur fluide. La boucle principale active le moteur et allume un voyant en réponse à la pression sur la pédale, démontrant une interaction directe entre l’entrée utilisateur et la commande mécanique. Réalisé par l’équipe RedOhm, le code se distingue par sa simplicité d’utilisation et son efficacité.
Dans le descriptif de la vidéo YouTube, vous retrouverez toutes les informations nécessaires.
Retour au sommaire Téléchargement fichiers