***
Mise à jour le 26/04/2016
Rappel : Documentation sur le matériel utile dans nos réalisations.
Driver de moteurs pas-à-pas DM860
1. Introduction
Le DM860 est un driver digital de moteurs pas-à-pas basé sur un circuit DSP fabriqué par Leadshine. Il fait partie de la dernière génération de contrôleurs de moteurs pas-à-pas et apporte un niveau unique de fluidité de mouvement, procure un couple optimum et une bonne stabilité. Les moteurs peuvent fonctionner plus silencieusement, avec moins d’échauffement et un mouvement plus régulier qu’avec les drivers classiques.
Caractéristiques
– antirésonance et couple optimum
– résolution fine grâce au mode multi-step
– résolution paramétrable jusque 40000 pas/tour
– démarrage ‘soft-start’ à la mise sous tension
– tension d’alimentation de 24 à 80 Vcc (incluant les fluctuations et la force contre-électromotrice)
– courant de sortie paramétrable de 2,4 à 7,2 A
– fréquence maxi des impulsions de 200 kHz
– entrées compatibles TTL et isolées optiquement
– réduction automatique du courant au repos
– convient pour moteurs unipolaires et bipolaires
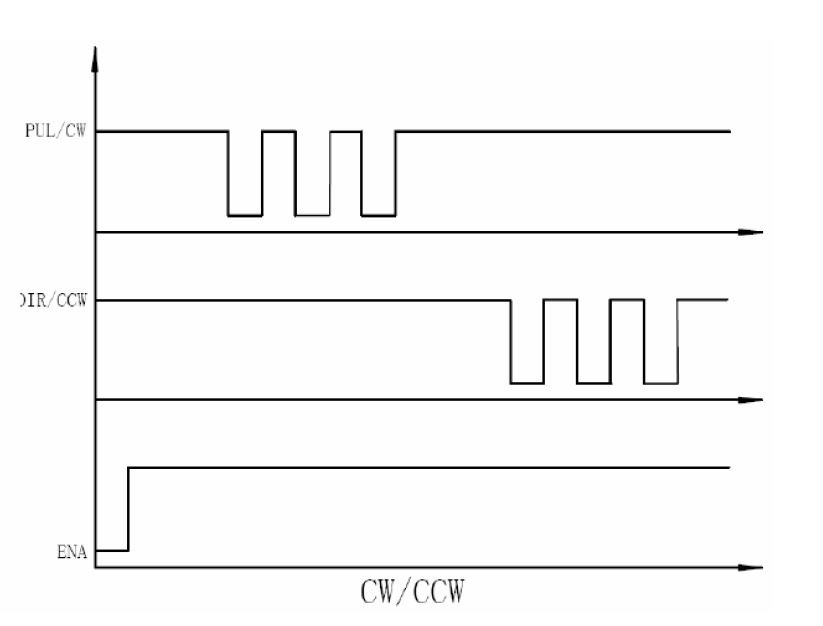
– supporte les modes PUL/DIR et CW/CCW
– protection contre les surtensions et les surintensités
– Pas de protection contre les inversions de polarité du driver
2. Spécifications électriques (Tj = 25 °C)
| Paramètres | Min | Typique | Max | Unité |
| Courant de sortie | 1 | – | 7.2 (en pointe) | A |
| Tension d’alimentation | 24 | 68 | 80 | Vcc |
| Intensité signal logique | 7 | 10 | 16 | mA |
| Fréquence d’impulsion | 0 | – | 200 | kHz |
| Largeur d’impulsion | 2.5 | – | – | micro/s |
| Tension d’impulsion | – | 5 | – | Vcc |
| Résistance d’isolation | 500 | Mohms |
Refroidissement
– La température du driver ne doit pas dépasser 70°C et la température de fonctionnement du
moteur ne doit pas dépasser 80°C.
– Il est recommandé d’utiliser la fonction de réduction automatique du courant de repos, ce qui
diminue l’échauffement du driver et du moteur.
– Il est recommandé de monter le boîtier du driver verticalement pour maximiser la surface du
refroidisseur. Une ventilation forcé peut être nécessaire.
Environnement
| Refroidissement | Refroidissement naturel ou ventilation forcée | |
| Environnement de travail | Environnement | Eviter la poussière, les vapeurs d’huile et les gaz corrosifs |
| Température ambiante | 0°C à 50°C | |
| Humidité 40 | 40 à 90% RH | |
| Température de service | 70°C maxi | |
| Vibration | 5,9 m/s² maxi | |
| Température de stockage | -20°C à +65°C | |
| Poids | Environ 620 g | |
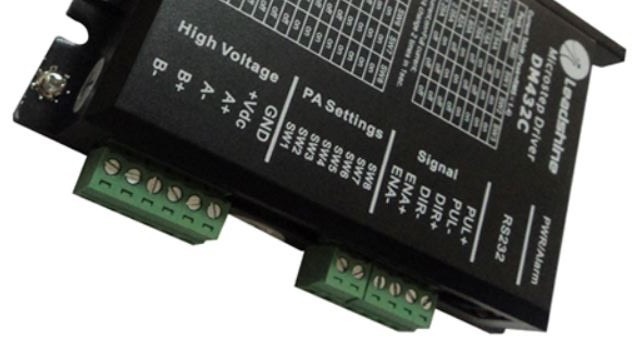
3. Description des broches
Le DM860 est équipé de 2 connecteurs débrochables : le connecteur P1 pour les signaux de contrôle et le connecteur P2 pour l’alimentation et le raccordement du moteur.
Configuration du connecteur P1
| Fonction | Détails |
| PUL+ | Pulse signal : en mode impulsion simple (pulse/direction), une impulsion montante ou descendante (cavalier interne J1) sur cette entrée fait avancer le moteur d’un pas. La tension de l’impulsion doit être de 4,5 à 5 V pour un état HAUT et 0 à 0,5 V pour un état BAS. En mode CW/CCW (cavalier interne J2), cette entrée représente une impulsion dans le sens des aiguilles d’une montre (CW). La largeur d’impulsion doit être de minimum 2,5 μs pour un fonctionnement correct. |
| PUL- | |
| DIR+ | DIR signal : en mode impulsion simple, ce signal a des niveaux de tension hauts et bas qui représentent les deux directions de rotation du moteur. En mode CW/CCW (cavalier interne J2), cette entrée représente une impulsion dans le sens contraire des aiguilles d’une montre (CW). Pour un fonctionnement fiable, ce signal doit être appliqué minimum 5 μs avant le signal PUL. La tension du signal DIR doit être de 4,5 à 5 V pour un état HAUT et 0 à 0,5 V pour un état BAS. La rotation dépend également du câblage. |
| DIR | |
| ENA+ | Enable signal : ce signal est utilisé pour permettre ou interdire l’utilisation du driver. Un signal haut permet d’utiliser le driver tandis qu’un sugnal bas le bloque. Ces broches sont habituellement laissées déconnectées. |
| ENA- |
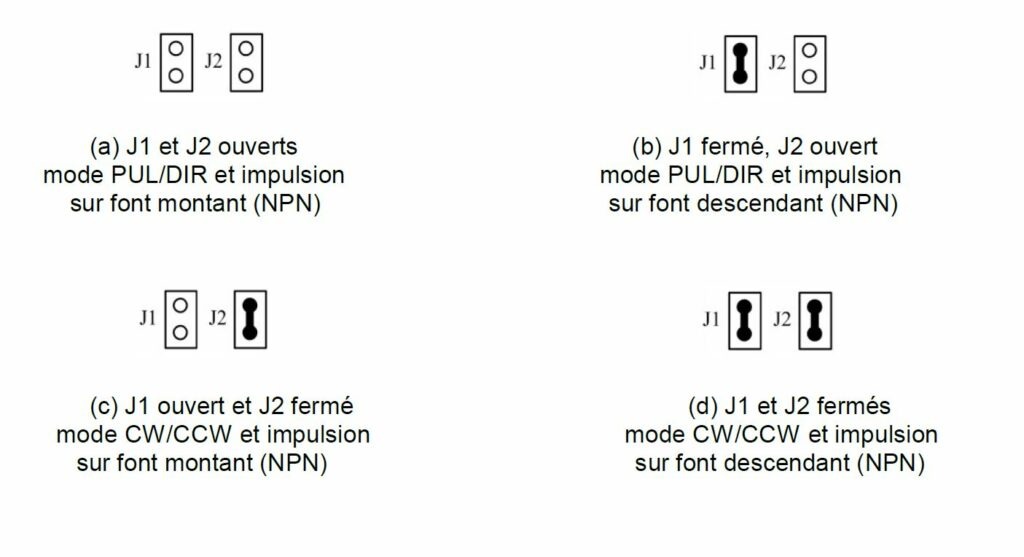
Sélection du type d’impulsion et du mode de contrôle du driver
Le DM860 dispose de 2 cavaliers internes J1 et J2. Le réglage par défaut est le mode PUL/DIR et une impulsion sur front montant. (Note : le cavalier J3 est utilisé pour inverser le sens de rotation du moteur)
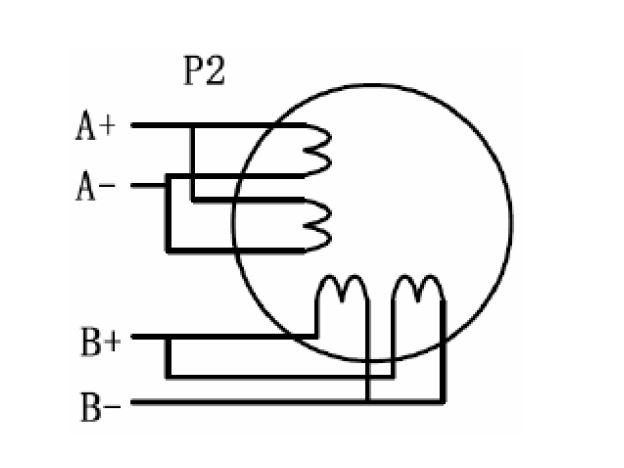
Configuration du connecteur P2
| Fonction | Détails |
| + Vcc | Tension d’alimentation : 24 à 80 Vcc (fluctuations de l’alimentation et force contre-électromotrice incluses) |
| GND | Masse |
| A+, A- | Phase A du moteur |
| B+, B- | Phase B du moteur |
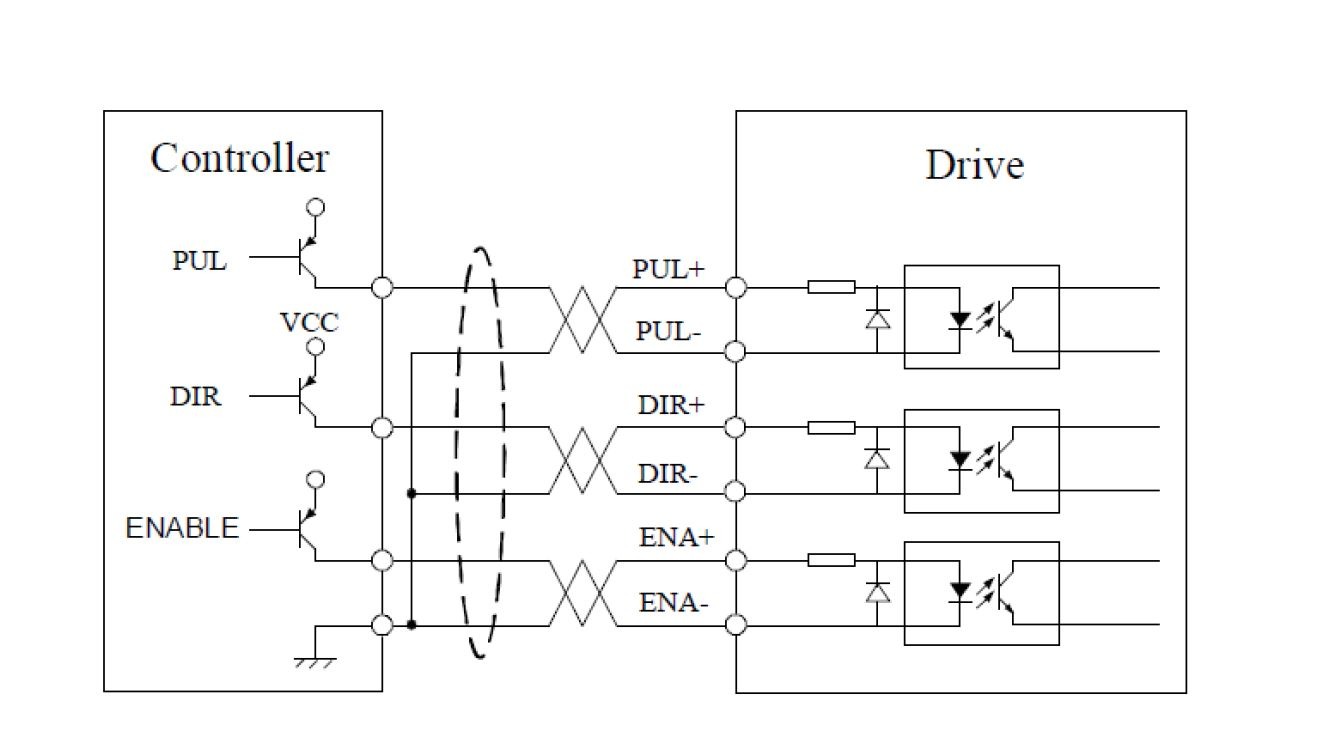
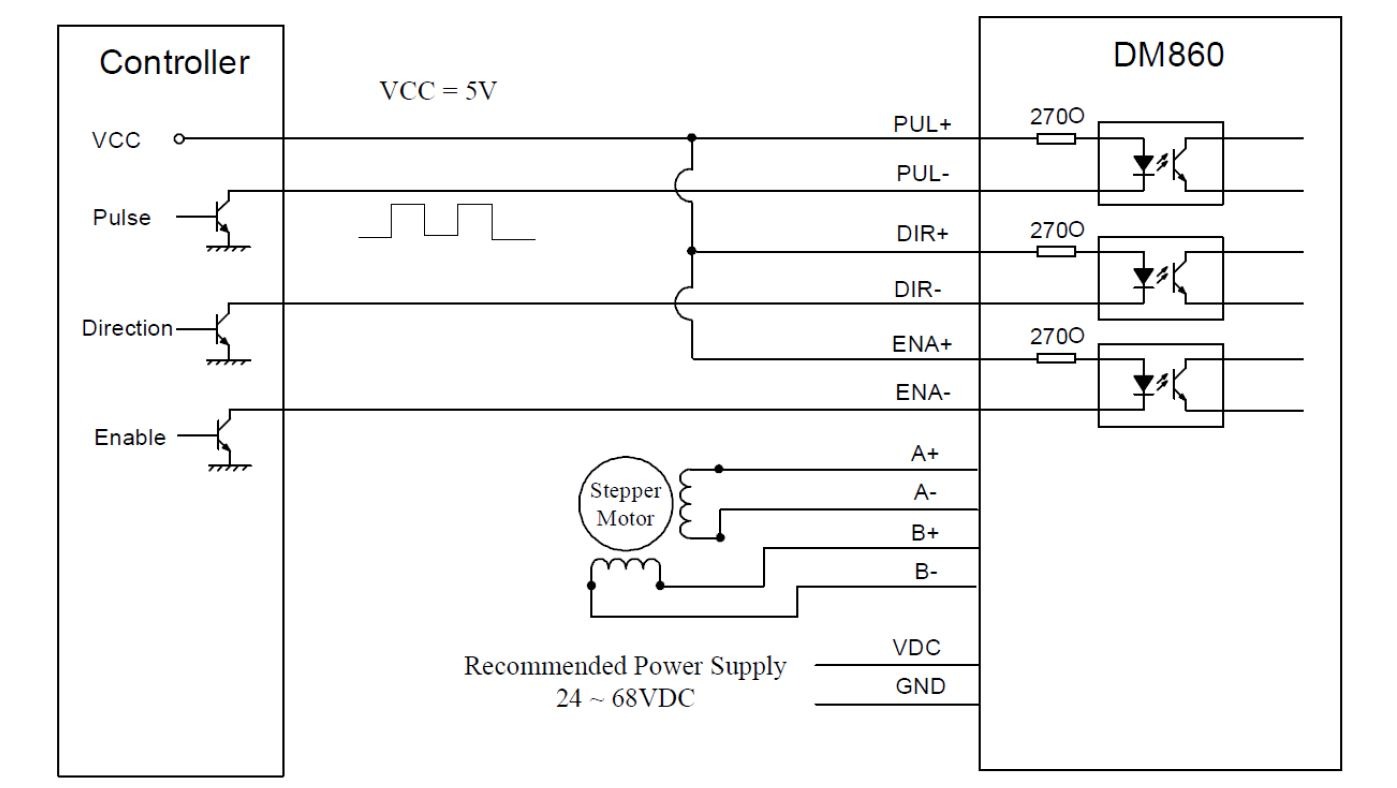
4. Signaux de contrôle (connecteur P1)
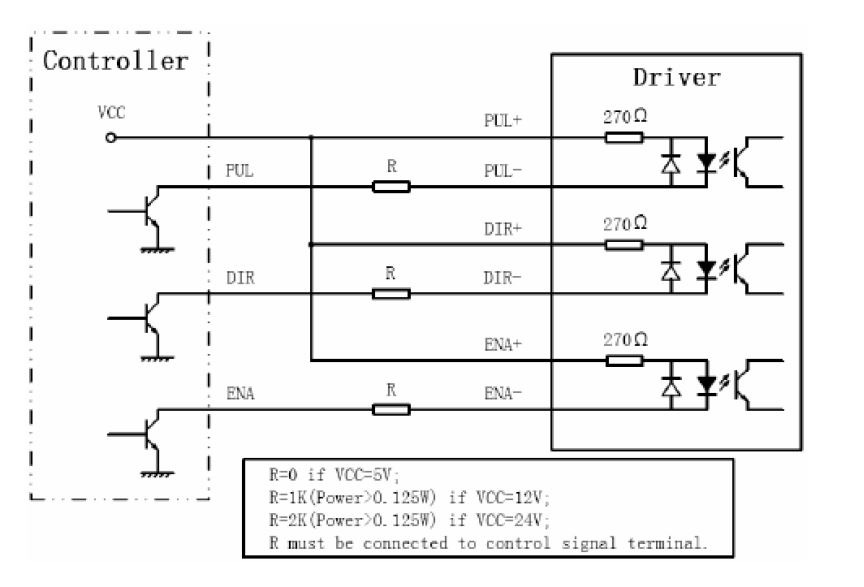
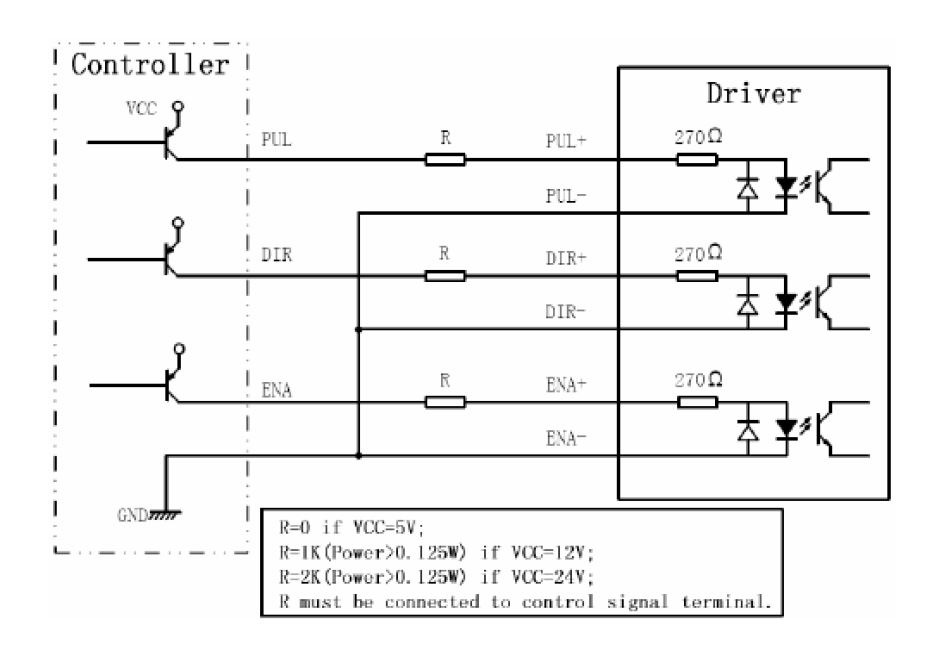
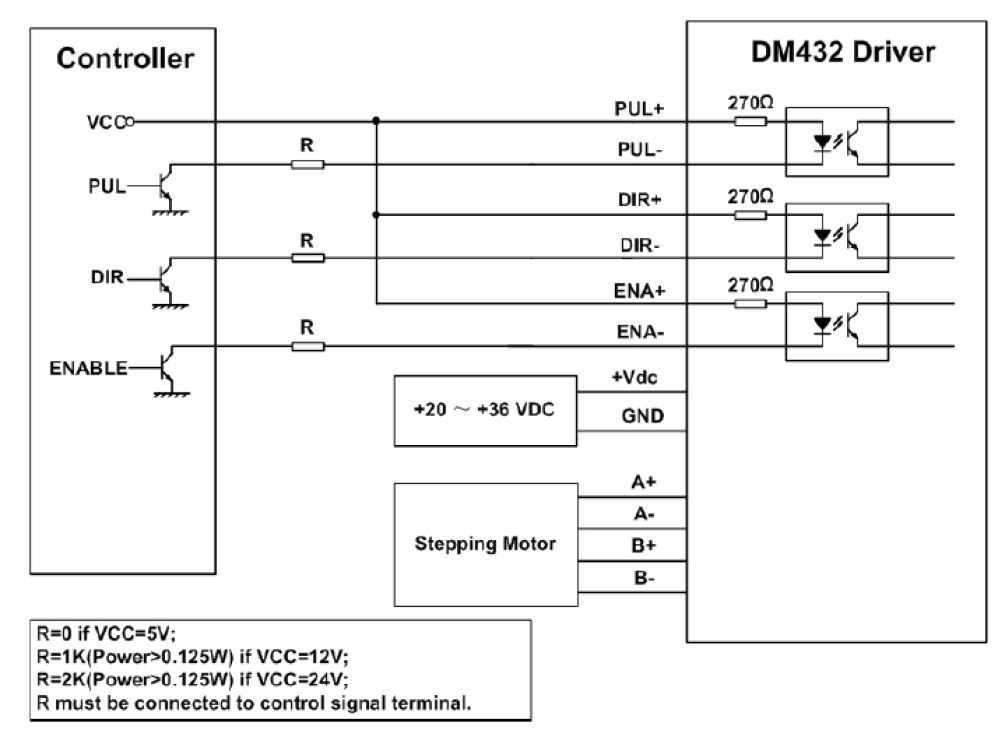
Le DM860 peut accepter des signaux différentiels et des signaux uniques (collecteur-ouvert et sortie PNP). Le DM890 dispose de 3 entrées logiques isolées optiquement situées sur le connecteur P1 destinées à recevoir les signaux de commande. Les connexions en collecteur ouvert et PNP sont décrites dans les schémas ci-dessous :
Fig.1 : Connexions en collecteur ouvert (anode commune)
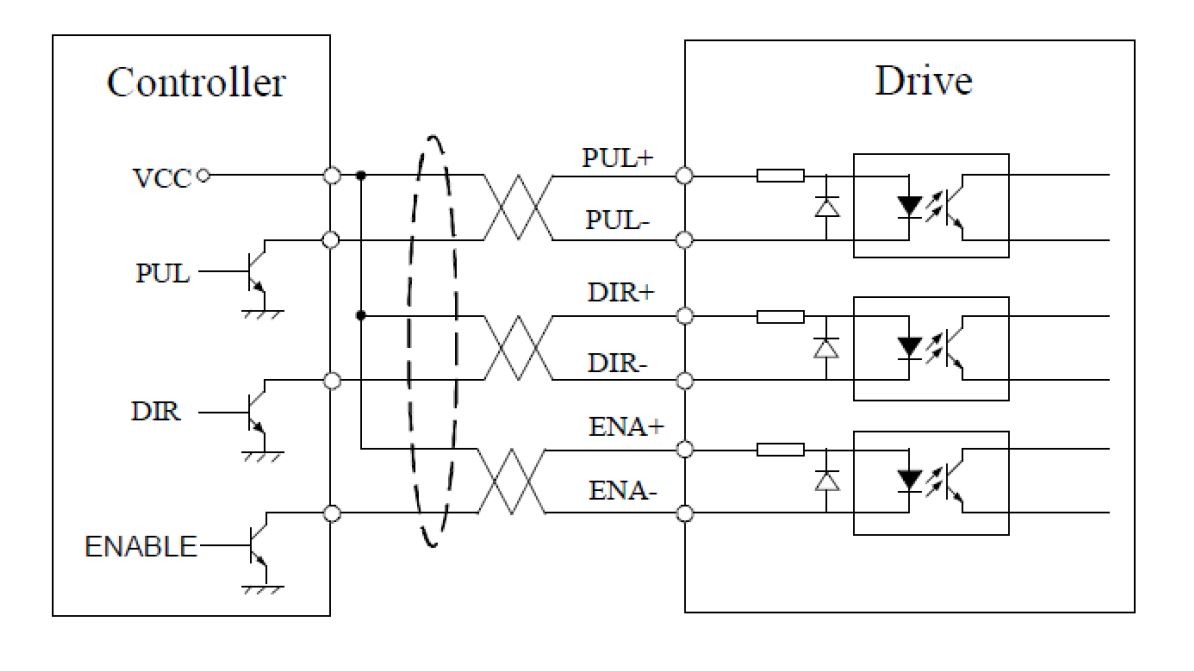
Fig.2 : Connexions en PNP (cathode commune)
5. Raccordement du moteur
Le DM860 peut piloter des moteurs pas-à-pas bipolaires et unipolaires.
NE JAMAIS RACCORDER OU DÉCONNECTER LE MOTEUR LORSQUE LE DRIVER EST SOUS
TENSION.
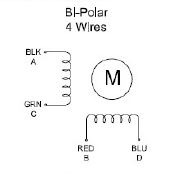
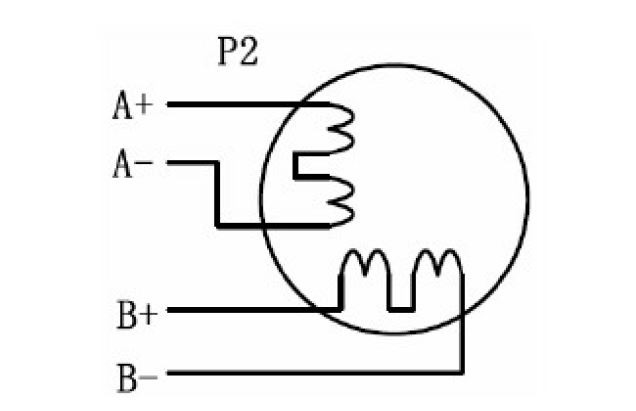
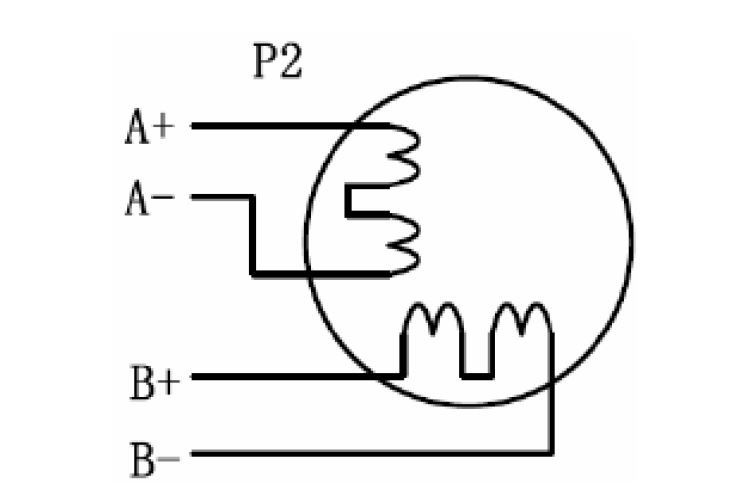
Connexions 4 fils
Les moteurs bipolaires à 4 fils sont les plus faciles à câbler. La vitesse et le couple dépendent de
l’inductance du bobinage. Lors de la sélection du courant de sortie du driver, il faut multiplier le courant de phase par 1,4 pour déterminer le courant de pointe.
Fig.3 : raccordement d’un moteur à 4 fils
Connexions 6 fils
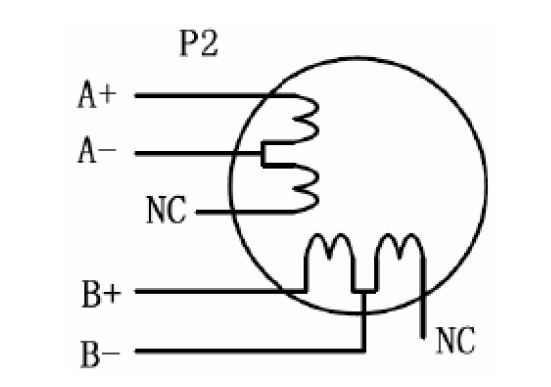
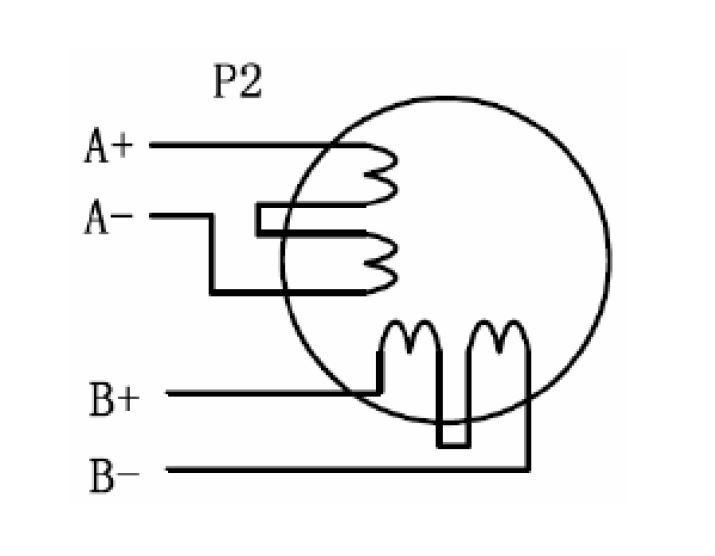
De même que pour les connexions à 8 fils, les moteurs à 6 fils peuvent être configurés pour obtenir des vitesses ou un couple élevé. La configuration »half coil » n’utilise que la moitié du bobinage et favorise les vitesses élevées, tandis que la configuration »full coil » utilise tout le bobinage et privilégie le couple.
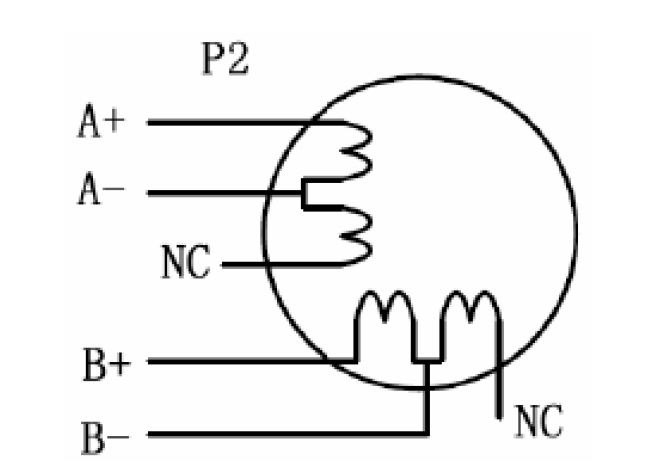
Configuration »half coil »
La moitié du bobinage est utilisée, ce qui donne une impédance plus faible et par conséquent moins de couple. Le couple sera plus stable à haute vitesse. Cette configuration est aussi appelée »half chopper ». Lors de la sélection du courant de sortie du driver, il faut multiplier le courant par phase (ou unipolaire) par 1,4 pour déterminer le courant de pointe.
Fig.4 : raccordement d’un moteur 6 fils en »half coil » (vitesse elevée)
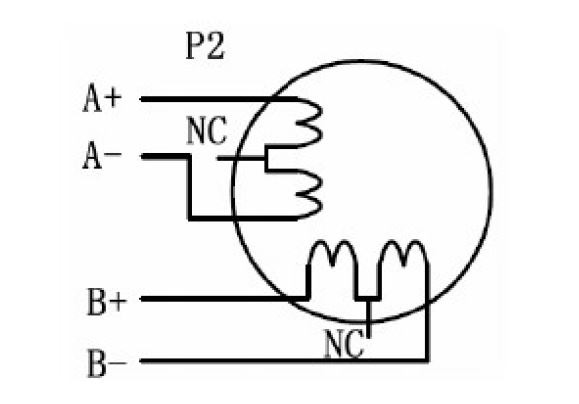
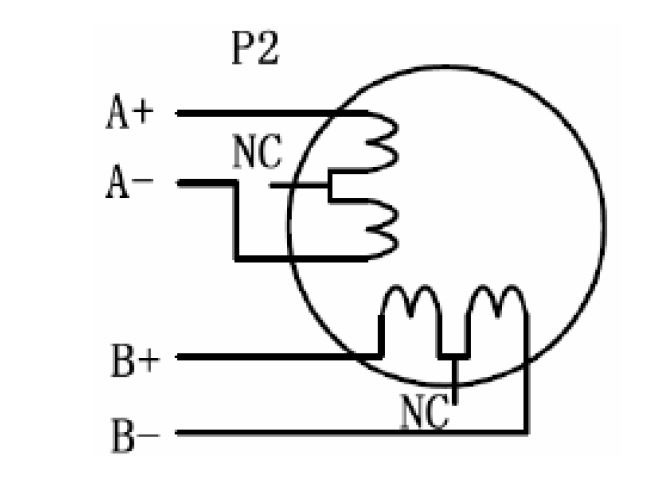
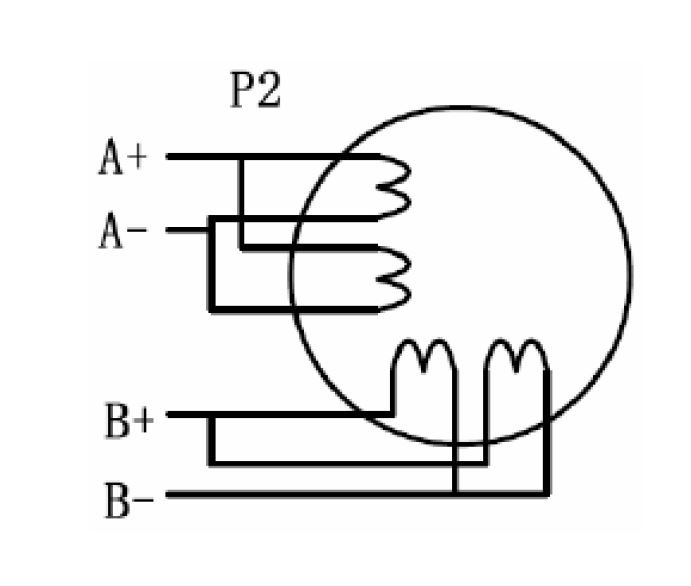
Configuration »full coil »
La configuration »full coil » sur un moteur à 6 fils doit être utilisée pour des applications nécessitant un couple élevé à faible vitesse. En mode »full coil », le moteur doit fonctionner à seulement 70% de son courant nominal pour éviter la surchauffe.
Fig. 5 : raccordement d’un moteur 6 fils en »full coil » (couple elevé)
Connexions 8 fils
Les moteurs à 8 fils offrent un haut degré de flexibilité au concepteur car ils peuvent être raccordés en série ou en parallèle.
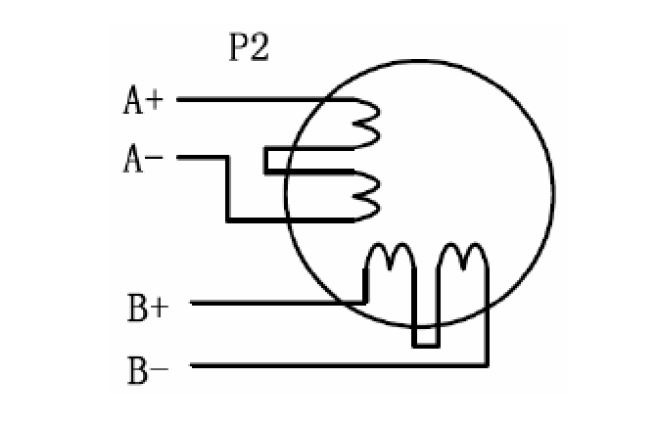
Connexions séries
Un raccordement en série est utilisé dans des applications nécessitant un couple élevé à faible vitesse.Cette configuration procure l’inductance la plus élevée ce qui entraîne une dégradation des performances à haute vitesse. En mode série, le moteur doit fonctionner à seulement 70% de son courant nominal pour éviter la surchauffe.
Fig.6 : raccordement d’un moteur 8 fils en série
Connexions parallèles
Un raccordement en parallèle offre un couple plus stable mais plus faible à faible vitesse. En raison de l’inductance plus faible, le couple sera plus élevé à haute vitesse. Lors de la sélection du courant de sortie du driver, il faut multiplier le courant par phase (ou unipolaire) par 1,96 pour déterminer le courant de pointe.
6. Choix de l’alimentation
Le DM860 convient pour des moteurs de moyenne et grandes tailles de NEMA 17 à 34. La tension d’alimentation détermine les performances du moteur à haute vitesse tandis que le courant détermine le couple de sortie du moteur spécialement à faible vitesse. Un tension d’alimentation élevée permettra d’atteindre des vitesses élevées, mais l’échauffement et le bruit seront plus importants. Si la vitesse demandée est faible, il est préférable d’utiliser une tension d’alimentation plus faible pour diminuer le bruit et l’échauffement et améliorer la fiabilité de fonctionnement.
Alimentation régulée ou non-régulée
Il est possible d’alimenter le driver avec une alimentation continue régulée ou simplement redressée et filtrée (non-régulée). Cependant, les alimentations non-régulées sont plus aptes à procurer un courant important instantanément.
Lors de l’utilisation d’une alimentation régulée, il faut prévoir une réserve de puissance suffisante pour assurer un fonctionnement correct en toutes circonstances (par exemple prendre une alim de 4A pour un courant nécessaire de 3A).
Choix de la tension d’alimentation
Les MOSFETS de puissance du DM860 peuvent fonctionner de 24 à 80 Vcc, fluctuations et force contre-électromotrice générée par le moteur incluses. Une tension d’alimentation élevée augmente le couple à haute vitesse, ce qui permet d’éviter de perdre des pas. Cependant, une tension d’alimentation élevée peut causer des vibrations du moteur à vitesse réduite et une surtension peut mettre le driver en protection ou l’endommager.
Il est donc conseillé de choisir la tension d’alimentation suffisamment haute pour l’application envisagée, et de ne pas sortir de la plage 24 Vcc à 68 Vcc.
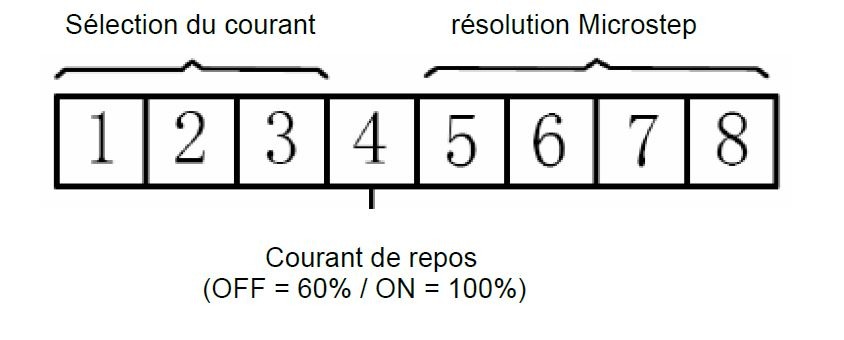
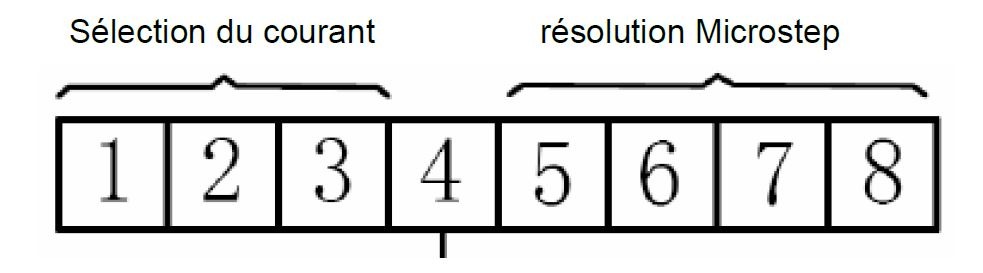
7. Sélection de la résolution et du courant
La résolution et le courant de sortie sont sélectionnables à l’aide de dip-switches. Un mode de configuration par logiciel existe mais nécessite un câble spécifique non disponible.
Courant de repos
(OFF = 50% / ON = 100%)
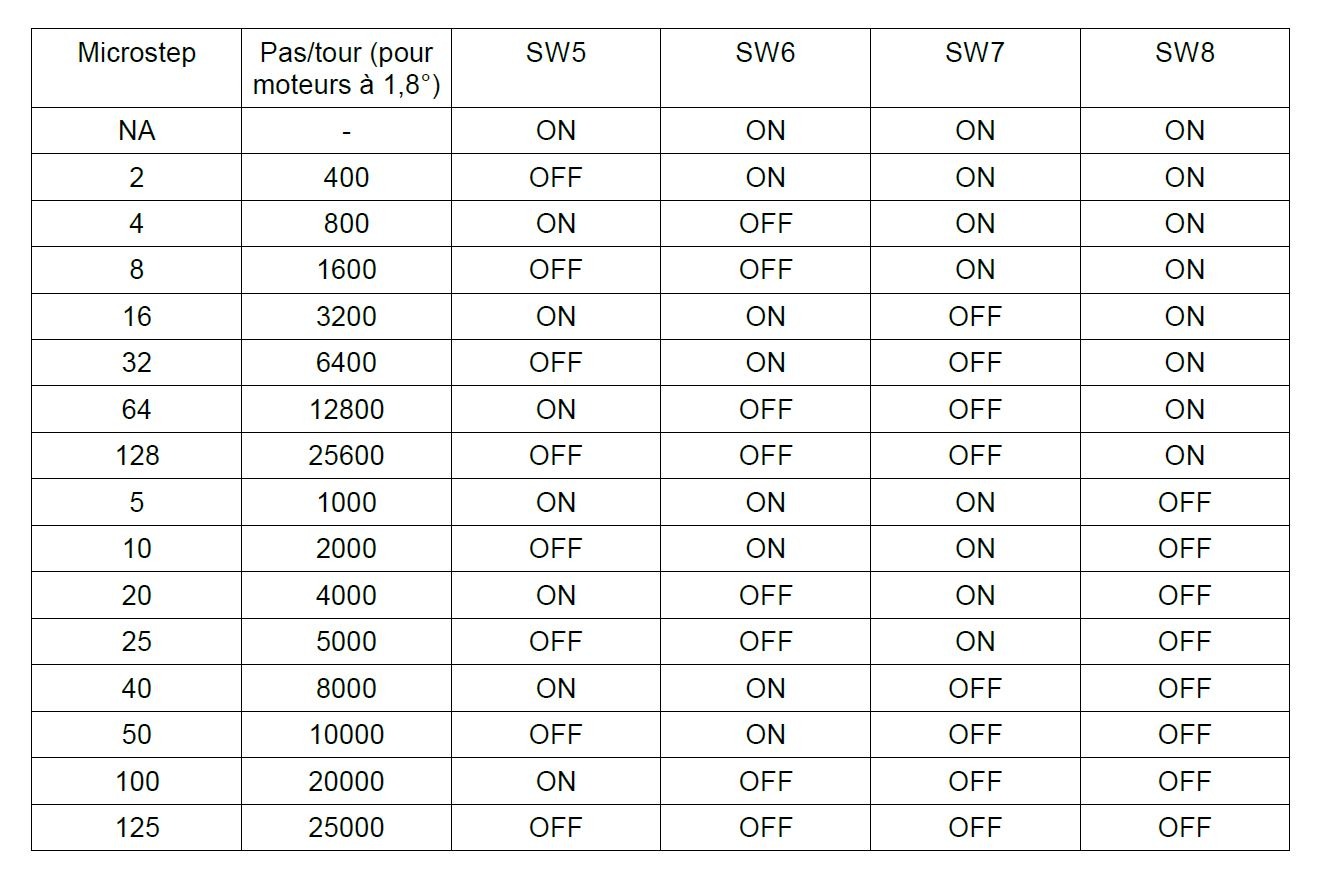
| Microstep |
Pas/tour (pour moteurs à 1,8°) |
SW5 | SW6 | SW7 | SW8 |
| 2 | 400 | ON | ON | ON | ON |
| 4 | 800 | OFF | ON | ON | ON |
| 8 | 1600 | ON | OFF | ON | ON |
| 16 | 3200 | OFF | OFF | ON | ON |
| 32 | 6400 | ON | ON | OFF | ON |
| 64 | 12800 | OFF | ON | OFF | ON |
| 128 | 25600 | ON | OFF | OFF | ON |
| 256 | 51200 | OFF | OFF | OFF | ON |
| 5 | 1000 | ON | ON | ON | OFF |
| 10 | 2000 | OFF | ON | ON | OFF |
| 20 | 4000 | ON | OFF | ON | OFF |
| 25 | 5000 | OFF | OFF | ON | OFF |
| 40 | 8000 | ON | ON | OFF | OFF |
| 50 | 10000 | OFF | ON | OFF | OFF |
| 100 | 20000 | ON | OFF | OFF | OFF |
| 200 | 40000 | OFF | OFF | OFF | OFF |
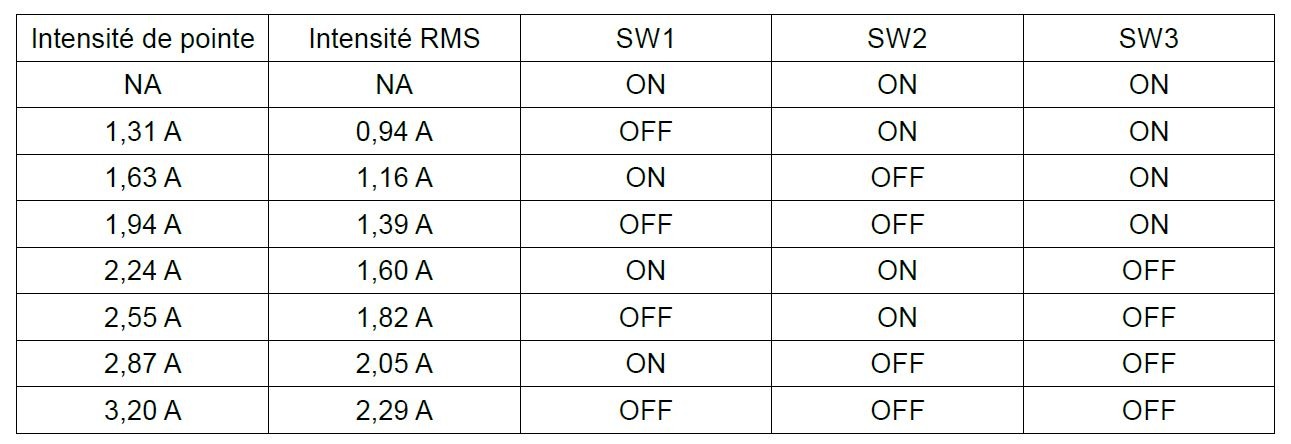
Réglage du courant
Pour un moteur donné, plus le courant du driver est élevé, plus le couple est élevé, mais cela entraîne plus d’échauffement dans le moteur et le driver. Par conséquent, le courant de sortie est en général ajusté de façon à éviter une surchauffe du moteur lors d’une utilisation prolongée. Le raccordement en série ou en parallèle des bobinages modifie de manière significative les inductance et résistance résultantes d’où l’importance d’en tenir compte lors du choix du courant de sortie.
L’intensité communiquée par le fabricant du moteur est importante pour sélectionner le courant, mais il faut également tenir compte du mode de raccordement.
Les 3 premiers inters du dip-switch permettent de régler le courant de sortie.
Réglage du courant de sortie dynamique
| Intensité de REF | Intensité de pointe | SW1 | SW2 | SW3 |
| 2.00A | 2.40A | ON | ON | ON |
| 2.57A | 3.08A | OFF | ON | ON |
| 3.14A | 3.77A | ON | OFF | ON |
| 3.71A | 4.45A | OFF | OFF | ON |
| 4.28A | 5.14A | ON | ON | OFF |
| 4.86A | 5.83A | OFF | ON | OFF |
| 5.43A | 6.52A | ON | OFF | OFF |
| 6.00A | 7.20A | OFF | OFF | OFF |
Note : en raison de l’inductance du moteur, l’intensité réelle dans les bobinages peut être plus faible que l’intensité de sortie dynamique sélectionnée, notamment en haute vitesse.
Réglage du courant de repos
SW4 permet de choisir entre un courant de repos réduit ou non. La position OFF permet de réduire le courant dans les bobinages à la moitié du courant de sortie sélectionné tandis que la position ON laisse le courant inchangé.
Le courant est automatiquement réduit à 50% de la valeur sélectionnée une seconde après la dernière impulsion. Cela doit diminuer l’échauffement théorique à 36% de sa valeur initiale.
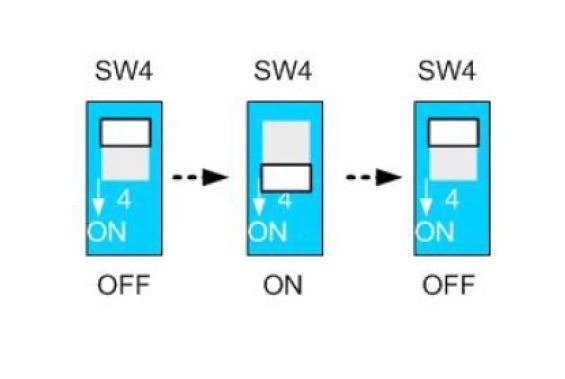
Auto réglage par SW4
Pour obtenir des performances optimisées, il suffit d’actionner 2 fois SW4 en une seconde pour
identifier les paramètres du moteur après l’avoir alimentée lors de sa première utilisation. Les
paramètres du moteur sont identifiés et les paramètres de courant en boucle du driver sont calculés automatiquement sur SW4 est activé. L’axe du moteur va vibrer pendant l’auto-configuration. Ne pas oublier de répéter l’opération en cas de changement de moteur.
Procédure d’auto-configuration
1. Raccorder le moteur au driver
2. Raccorder l’alimentation au driver
3. Brancher l’alimentation
4. S’assurer qu’aucune impulsion n’est envoyée au
driver
5. Actionner SW4 2 fois en 1 seconde (OFF-ONOFF
ou ON-OFF-ON)
8. Remarques concernant le câblage
– il est recommandé d’utiliser du câble blindé torsadé pour éviter les interférences
– pour éviter de perturber les signaux PUL et DIR, il est fortement déconseillé de placer les
câbles de commande et de puissance à proximité les uns des autres (une distance de 10 cm
entre les câbles de puissance et de commande est conseillée)
– la connexion ou déconnexion du connecteur P2 lorsque le driver est sous tension (même si le
moteur est au repos) endommagera le driver et annulera la garantie.
9. Connexions
Fig.8 : raccordement standard
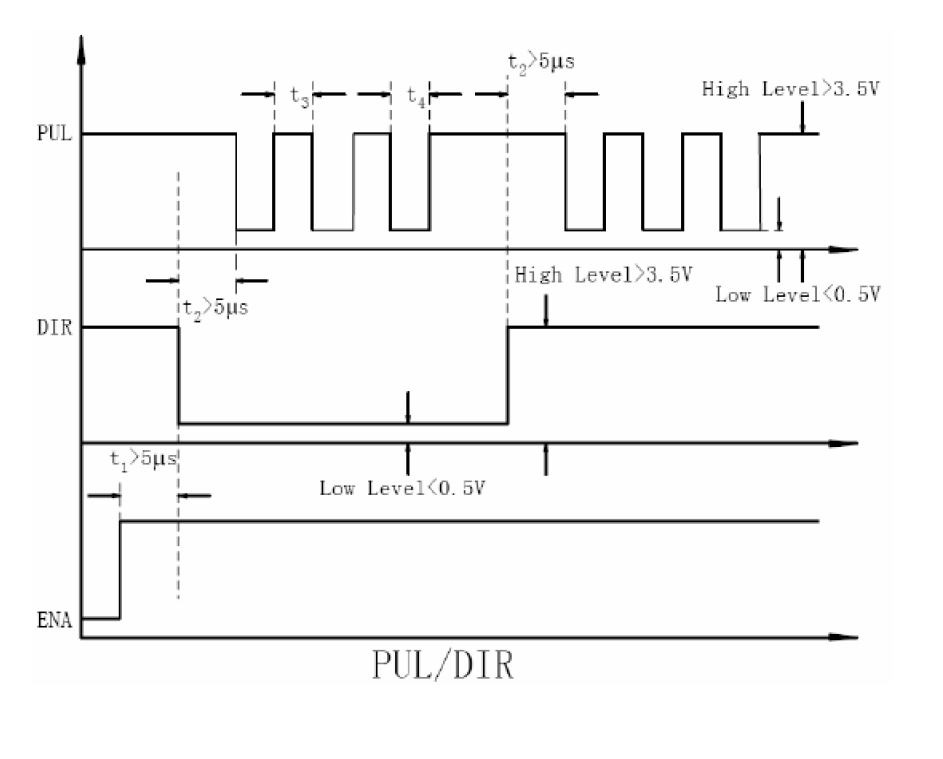
10. Signaux de commande
Afin d’éviter toutes perturbations de fonctionnement, les signaux de commande doivent respecter les règles ci-dessous :
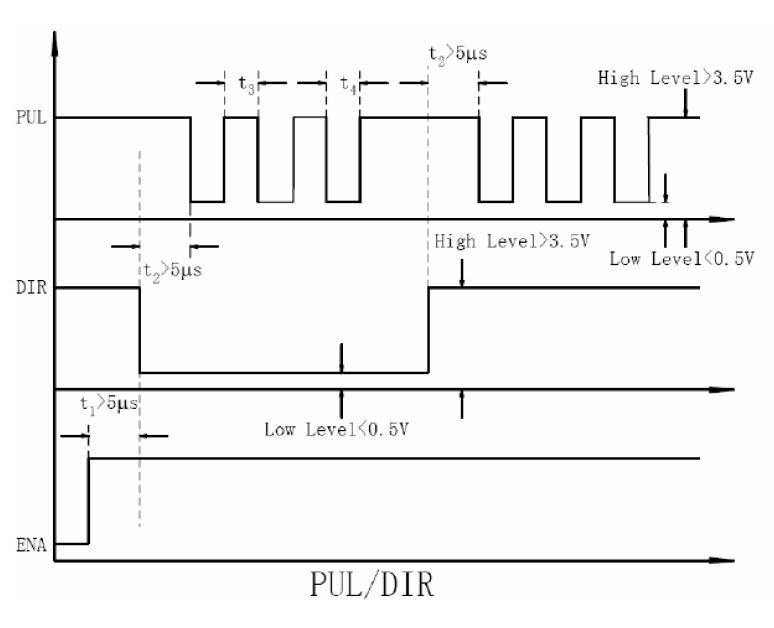
Remarques :
– t1 : ENA doit précéder DIR de minimum 5 μs. En règle générale, ENA+ et ENA- ne sont pas
connectées.
– t2 : DIR doit précéder PUL de minimum 5 μs pour assurer la rotation dans le bon sens.
– t3 : la largeur de l’impulsion doit être de 2,5 μs minimum
– t4 : la largeur de l’impulsion basse doit être de 2,5 μs minimum
11. Protections
Le driver est équipé de protections et utilise une LED rouge pour indiquer quelle protection a été activée. La période de la LED est de 3 secondes et le nombre de clignotements indique le type de protection activé. Etant donné qu’une seule protection peut être indiquée par la led, le driver indique la protection en fonction des priorités.
Protection contre les sur-intensités
La protection contre les sur-intensités sera activée si le courant est trop élevé ou en cas de court-circuit entre les bobinages du moteur et la masse. La LED rouge s’allumera 1 fois toutes les 3 secondes.
Protection contre les surtensions
Si la tension dépasse 96 ± 1 Vcc, la protection contre les surtensions sera activée et la LED rouge
s’allumera 2 fois toutes les 3 secondes.
ATTENTION : lorsque les protections ci-dessus sont activées, l’axe du moteur sera libre ou la LED rouge restera allumée. Lorsque les problèmes sont résolu, il faut redémarrer le driver en l’alimentant à nouveau. Le driver n’est pas protégé contre les inversions de polarité, une inversion de polarité détruira le driver instantanément et annulera la garantie.
Quelques pannes ou défauts
| Symptômes | Causes possibles |
| Le moteur ne tourne pas | Pas d’alimentation |
| Mauvaise résolution Microstep | |
| Mauvais choix de courant de sortie | |
| Erreur en cours (LED rouge clignote) | |
| Driver inhibé (voir ENA) | |
| Le moteur tourne dans le mauvais sens | Mauvais raccordement des bobinages |
| Driver en sécurité | Mauvais choix de courant de sortie |
| Problème avec les bobinages du moteur | |
| Fonctionnement erratique du moteur | Signal de commande trop faible |
| Interférence dans le signal de contrôle | |
| Mauvais raccordement du moteur | |
| Problème avec les bobinages du moteur | |
| Courant sélectionné trop faible, perte de pas | |
| Le moteur cale à l’accélération | Courant sélectionné trop faible |
| Moteur sous-dimensionné pour l’application | |
| Accélération trop élevée | |
| Tension d’alimentation trop faible | |
| Echauffement excessif du moteur et du driver | Refroidissement inadéquat |
| Réduction automatique du courant non utilisé | |
| Courant de sortie trop important |
Moteurs compatibles:
| Référence moteur | 34HS31-5504S | 23HS30-2804S | 23HS22-3006S | 57STH56R |
| Nbrs de pas | 200 | 200 | 200 | 200 |
| Courant phase | 5,5A | 2,8A | 3A | 2,8A |
| Couple de maintien | 45,8kg,cm | 18,9kg,cm | 9kg,cm | 12kg,cm |
| Poids | 2,3kg | 1kg | 700g | |
– Moteur 23HS30-2804S -> Moteur pas-à-pas bipolaire de taille Nema 23 présentant un couple important de 189 Ncm, une grande précision et des niveaux de vibrations et de bruits faibles.
– Moteur 23HS22-3006S -> Moteur pas-à-pas unipolaire à 6 fils de taille Nema 23 présentant un couple important de 90 Ncm, une grande précision et des niveaux de vibrations et de bruits faibles.
– Moteur 57STH56R ->Moteur pas-à-pas bipolaire de taille Nema 23 présentant un couple de 11,2 kg.cm. Il est équipé d’un axe arrière de 3,8 mm permettant le montage d’un encodeur.
– Moteur 34HS31-5504S -> Moteur pas-à-pas bipolaire de taille Nema 34 présentant un couple important de 4,5 Nm
***
Leadshine – 3/F, Block 2, Nanyou Tianan Industrial Park, Nanshan District Shenzhen, China (traduction Gotronic)
Rappel : Documentation sur le matériel utile dans nos réalisations. Ces documentations sont soit: des traductions issues de la documentation constructeur ou de nos fournisseurs ( ou des traduction fournisseur ) . Nous avons travaillé avec cette documentation mais il se peut qu’une erreur se soit glissée dans nos lignes et nous ne pouvons être tenu pour responsable .
![]()