
.
Mise à jour le 24/10/2019. Rubrique traitant du module IMU Grove 101020079. Un module IMU est d’une centrale à inertie servant à la navigation.
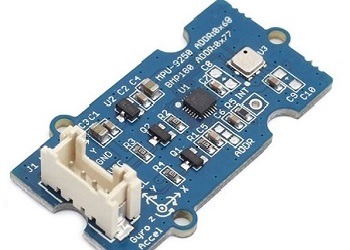
Module IMU ref : 101020079
Sommaire :
- Présentation du module IMU Grove 101020079
- Information sur le capteur BMP180 (Capteur de pression numérique)
- Brochage du capteur BMP180
- Information sur le capteur MPU-9250
- Brochage du capteur MPU-9250.
- Orientation des axes du capteur MPU-9250 .
- Comment calibrer le capteur Grove ?
- Comment afficher les données sortant du capteur Grove 101020079
- Source pour la réalisation de cet article
- A savoir sur l’utilisation des informations pour le module Grove 101020079
- Pour tout probléme
- Retour au menu.
![]()
Présentation du module IMU Grove 101020079 |
.
Ce module Grove est basé sur un MPU9250 et un BMP180 qui intègre un accéléromètre 3 axes (±2g, ±4g, ±8g et ±16g) couplé à un compas 3 axes (± 4800µT), à un gyroscope 3 axes (±250, ±500, ±1000 et ±2000dps) et à un capteur barométrique (300~1100hPa), qu’il vous sera possible de raccorder à une platine Arduino™ , CB210 , BeagleBone Black , Raspberry Pi™ d’une platine mère équipée de connecteurs « Grove ».
Il communique avec un microcontrôleur type Arduino ou compatible via le bus I2C.
- Interface : compatible Grove
- Alimentation : 5 Vcc
- Plage de mesures :
- gyroscope : ±250, ±500, ±1000 et ±2000 dps
- accéléromètre : ±2 g, ±4 g, ±8 g et ±16 g
- boussole : ±4800 µT
- pression : 300 ~ 1100 hPa
- Protocole : I2C
- Température de service : -40 ~ +85°C
- Dimensions : 25,4 x 20,3 mm
- Poids : 8 g
- Non compatible : avec Tinker Kit
- Référence Seeedstudio : 101020079
.
Retour au sommaire![]()
Information sur le capteur BMP180 |
.
Le BMP180 est le successeur compatible avec la fonction de l’BMP085, une nouvelle génération de capteur de haute précision de pression numériques pour les applications grand public.
La puissance ultra-faible, de l’électronique à basse tension du BMP180 est optimisé pour une utilisation dans les téléphones mobiles,PDA, appareils de navigation GPS et équipement de plein air. L’interface I2C permet facilement l’intégration du système avec un microcontrôleur.
Il se compose d’un capteur piézo-résistif, un convertisseur analogique-numérique et une unité de commande avec mémoire EEPROM et d’une interface série I2C. Les mesures brutes de pression et de température provenant du capteur BMP180 doit être compensée pour les effets de la température et d’autres paramètres en utilisant les données d’étalonnage enregistrées dans la mémoire EEPROM
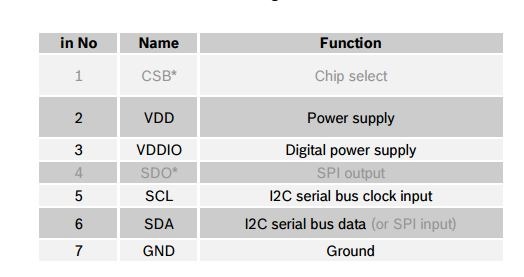
Brochage du capteur BMP180 :
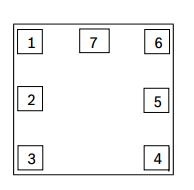
Brochage capteur BMP180
Documentation complète sur le BMP180
Retour au sommaire![]()
Information sur le capteur MPU-9250 |
.
Le dispositif de suivi du mouvement MEMS MPU-9250 à 9 axes contient un gyroscope MEMS, un accéléromètre et un compas, ainsi qu’un processeur de mouvement numérique (DMP) embarqué. L’unité de traitement du mouvement (MPU) propose un système en boîtier (SiP) qui intègre le MPU-6500 et la boussole numérique AK8963 à 3 axes. Cette interface de mouvement est prise en charge par les principaux systèmes d’exploitation et plates-formes matérielles disponibles. Les capteurs de mouvement MPU-9250 sont conçus pour l’utilisation dans les applications telles que les jeux, contrôleurs, souris 3D basés sur le mouvement, les télécommandes 3D pour tablettes, les téléviseurs téléphones intelligents et les capteurs portables.
.
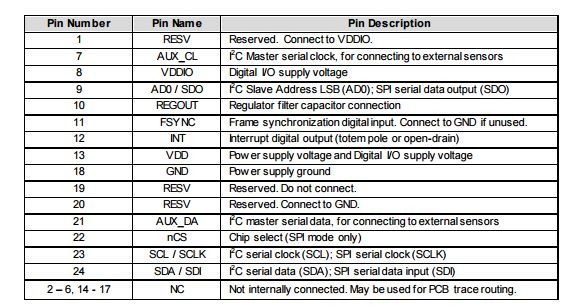
Brochage du capteur MPU-9250 .
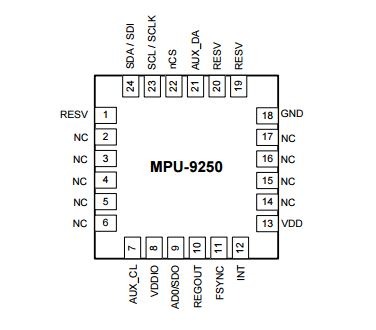
Brochage du capteur MPU-9250
Orientation des axes du capteur MPU-9250 .
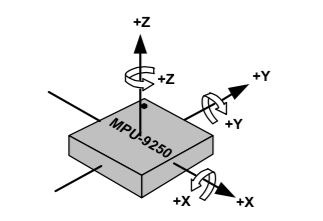
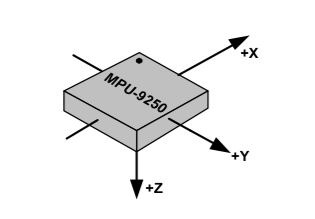
Retour au sommaire
![]()
Comment calibrer le capteur Grove 101020079 |
.
Ci-dessous , le programme vous permettant de calibrer le capteur
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 |
/* * * * Commenté par RedOHM * et modifié d'apres les sources * orginale * * Exemple de programme pour le * capteur IMU 10DOF * * Programme modifie pour la calibration du capteur * * nouvelle reference 101020050 * * 09/06/2016 * * Cette demonstration est sans garantie d'aucune sorte, * a vous de verifier la validitée des bibliothéques * que vous téléchargez et les parametres que vous modifiez. * ce programme a été testé sur notre materiel * * * */ // Initialise la librairie Wire et se connécte au bus I2C // Cette instruction ne doit normalement n'être appelée qu'une seule fois #include "Wire.h" /* Il est préférable d'insérer ces bibliothéques dans l'ordre suivant * bibliothéque I2Cdev : * La classe I2Cdev est construite pour être utilisée de manière statique, * ce qui réduit les besoins en mémoire si vous avez plusieurs périphériques * I2C dans votre projet. Une seule instance de la classe I2Cdev est * nécessaire */ #include "I2Cdev.h" // bibliothéque pour le gyroscope,l'accéléromètre et le compas #include "MPU9250.h" // bibliothéque pour le traitement du capteur de pression #include "BMP180.h" // l'adresse I2C par défaut est 0x68 // une adresses I2C spécifiques peut être transmise en tant que // paramètre ici // AD0 low = 0x68 // AD0 high = 0x69 MPU9250 accelgyro; I2Cdev I2C_M; uint8_t buffer_m[6]; // *** int16_t *** // Cette fonction lit les données d'un fichier à partir de la // position courante.Le but est de lire l'octet suivant du fichier // et renvoie la valeur de l'octet lu sous forme d'un int int16_t ax, ay, az; int16_t gx, gy, gz; int16_t mx, my, mz; // déclare des variables à virgule // Syntaxe -> float var = valeur; // var etant le nom de la variable float heading; float tiltheading; float Axyz[3]; float Gxyz[3]; float Mxyz[3]; // definition de -> #defini // Les constantes ainsi définie dans le langage Arduino // ne prennent aucune place supplémentaire en mémoire dans // le microcontrôleur. #define sample_num_mdate 5000 /* * Déclarer une variable volatile est une directive au compilateur. * Le compilateur est un logiciel qui traduit votre C dans le code * de la machine, qui sont les véritables instructions pour la puce * Atmega dans l'Arduino. * Plus précisément, elle dirige le compilateur pour charger la * variable de la mémoire vive, et non à partir d'un registre de * stockage, qui est un emplacement de mémoire temporaire dans lequel * les variables de programme sont stockées et manipulées. * Sous certaines conditions, la valeur d'une variable stockée dans * des registres peut être inexact. */ volatile float mx_sample[3]; volatile float my_sample[3]; volatile float mz_sample[3]; static float mx_centre = 0; static float my_centre = 0; static float mz_centre = 0; volatile int mx_max = 0; volatile int my_max = 0; volatile int mz_max = 0; volatile int mx_min = 0; volatile int my_min = 0; volatile int mz_min = 0; float temperature; float pressure; float atm; float altitude; BMP180 Barometer; void setup() { Wire.begin(); // initialisation de la connexion série // IMPORTANT : le terminal côté PC doit être réglé sur la même valeur. // sur ce projet la vitesse peut-etre établie à 38400 mais vous pouvez modifier // cette vitesse en fonction de votre projet Serial.begin(38400); Serial.println("***************************************************"); // vous informe que le systeme est initialisè Serial.println("* Initialisation du systeme I2C . *"); accelgyro.initialize(); Barometer.init(); // vérifie la connexion Serial.println("* Teste la connexion du peripherique *"); Serial.println("* *"); Serial.println(accelgyro.testConnection() ? "* MPU9250 connexion reussie" : "MPU9250 connexion a échoue "); Serial.println("***************************************************"); delay(3000); Serial.println(" "); // Commande si dessous pour la calibration Mxyz_init_calibrated (); } void loop() { getAccel_Data(); getGyro_Data(); // les données de la boussole ont été étalonné ci-dessous getCompassDate_calibrated(); // Avant d'utiliser la fonction ci-dessous, nous devrions // exécuter 'getCompassDate_calibrated () en premier lieu, // de sorte que nous pouvons obtenir des données étalonnées. // Alors nous pouvons obtenir l'angle correct. getHeading(); getTiltHeading(); Serial.println("calibration des parametres: "); Serial.print(mx_centre); Serial.print(" "); Serial.print(my_centre); Serial.print(" "); Serial.println(mz_centre); Serial.println(" "); Serial.println("Acceleration(g) of X,Y,Z:"); Serial.print(Axyz[0]); Serial.print(","); Serial.print(Axyz[1]); Serial.print(","); Serial.println(Axyz[2]); Serial.println("Gyro(degress/s) of X,Y,Z:"); Serial.print(Gxyz[0]); Serial.print(","); Serial.print(Gxyz[1]); Serial.print(","); Serial.println(Gxyz[2]); Serial.println("Compass Valeur of X,Y,Z:"); Serial.print(Mxyz[0]); Serial.print(","); Serial.print(Mxyz[1]); Serial.print(","); Serial.println(Mxyz[2]); Serial.println("L'angle horaire entre le nord magnetique et X-Axis:"); Serial.print(heading); Serial.println(" "); Serial.println("L'angle horaire entre le nord magnetique et la projection"); Serial.println("positif de X-Axis dans le plan horizontal:"); Serial.println(tiltheading); Serial.println(" "); // Lecture de la temperature ,cet indicateur doit etre appelé // en premier temperature = Barometer.bmp180GetTemperature(Barometer.bmp180ReadUT()); // Obetention de la pression pressure = Barometer.bmp180GetPressure(Barometer.bmp180ReadUP()); // Calcul de l'altitude altitude = Barometer.calcAltitude(pressure); atm = pressure / 101780; Serial.print("Temperature: "); // Affichage de 2 decimales Serial.print(temperature, 2); Serial.println("deg C"); Serial.print("Pression: "); // Affichage de 2 decimales Serial.print(pressure, 0); Serial.println(" Pa"); Serial.print("Ralated Atmosphere: "); // Affichage sur 4 decimales Serial.println(atm, 4); Serial.print("Altitude: "); // Affichage de 2 decimales Serial.print(altitude, 2); Serial.println(" m"); Serial.println(); delay(1000); } void getHeading(void) { heading = 180 * atan2(Mxyz[1], Mxyz[0]) / PI; if (heading < 0) heading += 360; } void getTiltHeading(void) { float pitch = asin(-Axyz[0]); float roll = asin(Axyz[1] / cos(pitch)); float xh = Mxyz[0] * cos(pitch) + Mxyz[2] * sin(pitch); float yh = Mxyz[0] * sin(roll) * sin(pitch) + Mxyz[1] * cos(roll) - Mxyz[2] * sin(roll) * cos(pitch); float zh = -Mxyz[0] * cos(roll) * sin(pitch) + Mxyz[1] * sin(roll) + Mxyz[2] * cos(roll) * cos(pitch); tiltheading = 180 * atan2(yh, xh) / PI; if (yh < 0) tiltheading += 360; } void Mxyz_init_calibrated () { Serial.println(F("Avant d'utiliser 9DOF, nous avons besoin de calibrer la boussole, cela prend environ 2 minutes.")); Serial.print(" "); Serial.println(F("Au cours du calibrage, vous devez faire pivoter et tourner le capteur en permanence pendant 2 minutes.")); Serial.print(" "); Serial.println(F("envoyer l'information ready.")); while (!Serial.find("ready")); Serial.println(" "); Serial.println("ready"); Serial.println("demmarrage de l'echantillonnage......"); Serial.println("attendez s'il vous plait ......"); get_calibration_Data (); Serial.println(" "); Serial.println("paramètre de calibrage du compas"); Serial.print(mx_centre); Serial.print(" "); Serial.print(my_centre); Serial.print(" "); Serial.println(mz_centre); Serial.println(" "); } void get_calibration_Data () { for (int i = 0; i < sample_num_mdate; i++) { get_one_sample_date_mxyz(); // Visualisation de l'echantillonnage Serial.print(mx_sample[2]); Serial.print(" "); Serial.print(my_sample[2]); Serial.print(" "); Serial.println(mz_sample[2]); //trouver de la valeur max if (mx_sample[2] >= mx_sample[1])mx_sample[1] = mx_sample[2]; if (my_sample[2] >= my_sample[1])my_sample[1] = my_sample[2]; if (mz_sample[2] >= mz_sample[1])mz_sample[1] = mz_sample[2]; if (mx_sample[2] <= mx_sample[0])mx_sample[0] = mx_sample[2]; if (my_sample[2] <= my_sample[0])my_sample[0] = my_sample[2]; if (mz_sample[2] <= mz_sample[0])mz_sample[0] = mz_sample[2]; } mx_max = mx_sample[1]; my_max = my_sample[1]; mz_max = mz_sample[1]; mx_min = mx_sample[0]; my_min = my_sample[0]; mz_min = mz_sample[0]; mx_centre = (mx_max + mx_min) / 2; my_centre = (my_max + my_min) / 2; mz_centre = (mz_max + mz_min) / 2; } void get_one_sample_date_mxyz() { getCompass_Data(); mx_sample[2] = Mxyz[0]; my_sample[2] = Mxyz[1]; mz_sample[2] = Mxyz[2]; } void getAccel_Data(void) { accelgyro.getMotion9(&ax, &ay, &az, &gx, &gy, &gz, &mx, &my, &mz); Axyz[0] = (double) ax / 16384; Axyz[1] = (double) ay / 16384; Axyz[2] = (double) az / 16384; } void getGyro_Data(void) { accelgyro.getMotion9(&ax, &ay, &az, &gx, &gy, &gz, &mx, &my, &mz); Gxyz[0] = (double) gx * 250 / 32768; Gxyz[1] = (double) gy * 250 / 32768; Gxyz[2] = (double) gz * 250 / 32768; } void getCompass_Data(void) { // activation du magnétomètre I2C_M.writeByte(MPU9150_RA_MAG_ADDRESS, 0x0A, 0x01); delay(10); I2C_M.readBytes(MPU9150_RA_MAG_ADDRESS, MPU9150_RA_MAG_XOUT_L, 6, buffer_m); mx = ((int16_t)(buffer_m[1]) << 8) | buffer_m[0] ; my = ((int16_t)(buffer_m[3]) << 8) | buffer_m[2] ; mz = ((int16_t)(buffer_m[5]) << 8) | buffer_m[4] ; Mxyz[0] = (double) mx * 1200 / 4096; Mxyz[1] = (double) my * 1200 / 4096; Mxyz[2] = (double) mz * 1200 / 4096; } void getCompassDate_calibrated () { getCompass_Data(); Mxyz[0] = Mxyz[0] - mx_centre; Mxyz[1] = Mxyz[1] - my_centre; Mxyz[2] = Mxyz[2] - mz_centre; } |
.
Téléchargement : Grove 101020079 capteur IMU calibration
.
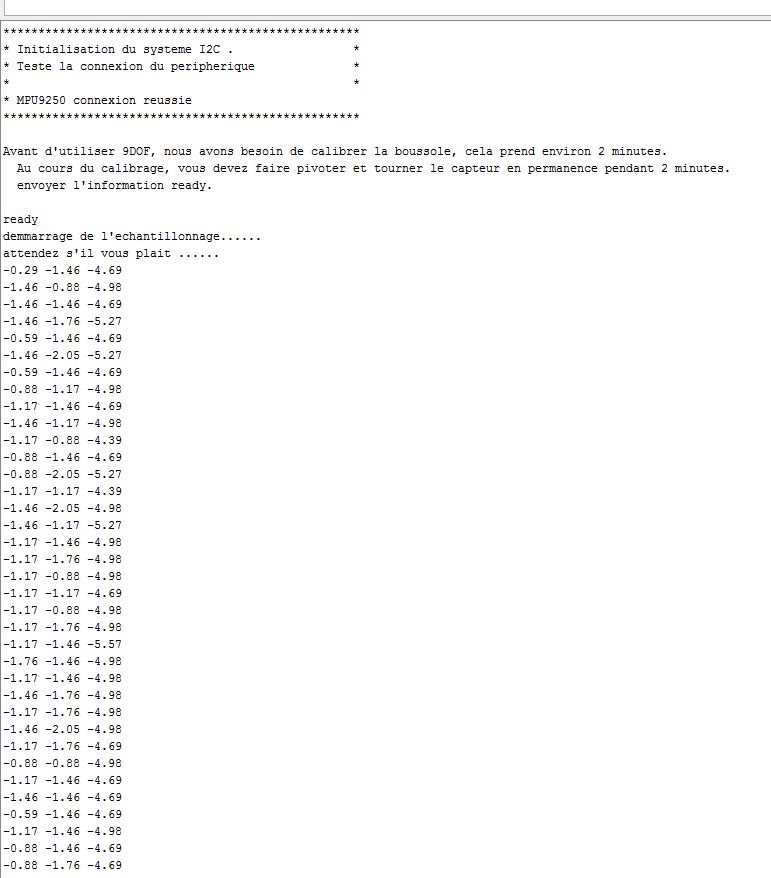
Démarrage du programme de calibration . Pour le démarrage de la calibration taper » ready » dans le masque de saisie sur le moniteur
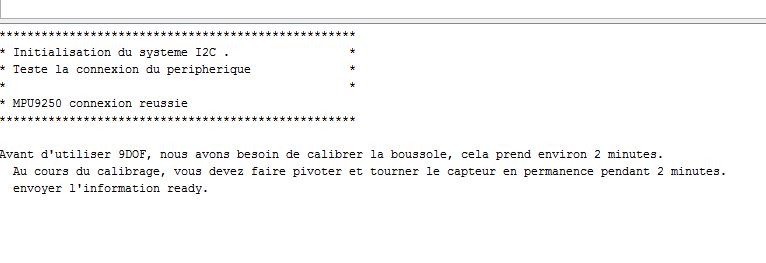
Apres avoir tapé « ready » vous verrez apparaître les différentes valeurs qui vont servir à la calibration du capteur
.
Retour au sommaire![]()
Comment affficher les données sortant du capteur Grove 101020079 |
.
Ci-dessous , le programme vous permettant de visualiser les différentes valeurs , du gyroscope 3 axes, de l’accéléromètre 3 axes, du magnétomètre 3 axes ,du baromètre et du capteur de température .
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 |
// // /* * Commenté par RedOHM * et modifié d'apres les sources * orginale * * Exemple de programme pour le * capteur IMU 10DOF * nouvelle reference 101020050 * * 19/05/2016 * * Cette demonstration est sans garantie d'aucune sorte, * a vous de verifier la validitée des bibliothéques * que vous téléchargez et les parametres que vous modifiez. * ce programme a été testé sur notre materiel */ // Initialise la librairie Wire et se connécte au bus I2C // Cette instruction ne doit normalement n'être appelée qu'une seule fois #include "Wire.h" /* Il est préférable d'insérer ces bibliothéques dans l'ordre suivant * bibliothéque I2Cdev : * La classe I2Cdev est construite pour être utilisée de manière statique, * ce qui réduit les besoins en mémoire si vous avez plusieurs périphériques * I2C dans votre projet. Une seule instance de la classe I2Cdev est * nécessaire */ #include "I2Cdev.h" // bibliothéque pour le gyroscope,l'accéléromètre et le compas #include "MPU9250.h" // bibliothéque pour le traitement du capteur de pression #include "BMP180.h" // l'adresse I2C par défaut est 0x68 // une adresses I2C spécifiques peut être transmise en tant que // paramètre ici // AD0 low = 0x68 // AD0 high = 0x69 MPU9250 accelgyro; I2Cdev I2C_M; uint8_t buffer_m[6]; // *** int16_t *** // Cette fonction lit les données d'un fichier à partir de la // position courante.Le but est de lire l'octet suivant du fichier // et renvoie la valeur de l'octet lu sous forme d'un int int16_t ax, ay, az; int16_t gx, gy, gz; int16_t mx, my, mz; // déclare des variables à virgule // Syntaxe -> float var = valeur; // var etant le nom de la variable float heading; float tiltheading; float Axyz[3]; float Gxyz[3]; float Mxyz[3]; // definition de -> #defini // Les constantes ainsi définie dans le langage Arduino // ne prennent aucune place supplémentaire en mémoire dans // le microcontrôleur. #define sample_num_mdate 5000 /* * Déclarer une variable volatile est une directive au compilateur. * Le compilateur est un logiciel qui traduit votre C dans le code * de la machine, qui sont les véritables instructions pour la puce * Atmega dans l'Arduino. * Plus précisément, elle dirige le compilateur pour charger la * variable de la mémoire vive, et non à partir d'un registre de * stockage, qui est un emplacement de mémoire temporaire dans lequel * les variables de programme sont stockées et manipulées. * Sous certaines conditions, la valeur d'une variable stockée dans * des registres peut être inexact. */ volatile float mx_sample[3]; volatile float my_sample[3]; volatile float mz_sample[3]; static float mx_centre = 0; static float my_centre = 0; static float mz_centre = 0; volatile int mx_max = 0; volatile int my_max = 0; volatile int mz_max = 0; volatile int mx_min = 0; volatile int my_min = 0; volatile int mz_min = 0; float temperature; float pressure; float atm; float altitude; BMP180 Barometer; void setup() { Wire.begin(); // initialisation de la connexion série // IMPORTANT : le terminal côté PC doit être réglé sur la même valeur. // sur ce projet la vitesse peut-etre établie à 38400 mais vous pouvez modifier // cette vitesse en fonction de votre projet Serial.begin(38400); Serial.println("***************************************************"); // vous informe que le systeme est initialisè Serial.println("* Initialisation du systeme I2C . *"); accelgyro.initialize(); Barometer.init(); // vérifie la connexion Serial.println("* Teste la connexion du peripherique *"); Serial.println("* *"); Serial.println(accelgyro.testConnection() ? "* MPU9250 connexion reussie" : "MPU9250 connexion a échoue "); Serial.println("***************************************************"); delay(3000); Serial.println(" "); // attention la commande si dessous doit d'etre activé pour la calibration // Mxyz_init_calibrated (); } void loop() { getAccel_Data(); getGyro_Data(); // les données de la boussole ont été étalonné ci-dessous getCompassDate_calibrated(); // Avant d'utiliser la fonction ci-dessous, nous devrions // exécuter 'getCompassDate_calibrated () en premier lieu, // de sorte que nous pouvons obtenir des données étalonnées. // Alors nous pouvons obtenir l'angle correct. getHeading(); getTiltHeading(); Serial.println("calibration des parametres: "); Serial.print(mx_centre); Serial.print(" "); Serial.print(my_centre); Serial.print(" "); Serial.println(mz_centre); Serial.println(" "); Serial.println("Acceleration(g) of X,Y,Z:"); Serial.print(Axyz[0]); Serial.print(","); Serial.print(Axyz[1]); Serial.print(","); Serial.println(Axyz[2]); Serial.println("Gyro(degress/s) of X,Y,Z:"); Serial.print(Gxyz[0]); Serial.print(","); Serial.print(Gxyz[1]); Serial.print(","); Serial.println(Gxyz[2]); Serial.println("Compass Valeur of X,Y,Z:"); Serial.print(Mxyz[0]); Serial.print(","); Serial.print(Mxyz[1]); Serial.print(","); Serial.println(Mxyz[2]); Serial.println("L'angle horaire entre le nord magnetique et X-Axis:"); Serial.print(heading); Serial.println(" "); Serial.println("L'angle horaire entre le nord magnetique et la projection"); Serial.println("positif de X-Axis dans le plan horizontal:"); Serial.println(tiltheading); Serial.println(" "); // Lecture de la temperature ,cet indicateur doit etre appelé // en premier temperature = Barometer.bmp180GetTemperature(Barometer.bmp180ReadUT()); // Obetention de la pression pressure = Barometer.bmp180GetPressure(Barometer.bmp180ReadUP()); // Calcul de l'altitude altitude = Barometer.calcAltitude(pressure); atm = pressure / 101780; Serial.print("Temperature: "); // Affichage de 2 decimales Serial.print(temperature, 2); Serial.println("deg C"); Serial.print("Pression: "); // Affichage de 2 decimales Serial.print(pressure, 0); Serial.println(" Pa"); Serial.print("Ralated Atmosphere: "); // Affichage sur 4 decimales Serial.println(atm, 4); Serial.print("Altitude: "); // Affichage de 2 decimales Serial.print(altitude, 2); Serial.println(" m"); Serial.println(); delay(1000); } void getHeading(void) { heading = 180 * atan2(Mxyz[1], Mxyz[0]) / PI; if (heading < 0) heading += 360; } void getTiltHeading(void) { float pitch = asin(-Axyz[0]); float roll = asin(Axyz[1] / cos(pitch)); float xh = Mxyz[0] * cos(pitch) + Mxyz[2] * sin(pitch); float yh = Mxyz[0] * sin(roll) * sin(pitch) + Mxyz[1] * cos(roll) - Mxyz[2] * sin(roll) * cos(pitch); float zh = -Mxyz[0] * cos(roll) * sin(pitch) + Mxyz[1] * sin(roll) + Mxyz[2] * cos(roll) * cos(pitch); tiltheading = 180 * atan2(yh, xh) / PI; if (yh < 0) tiltheading += 360; } void Mxyz_init_calibrated () { Serial.println(F("Avant d'utiliser 9DOF, nous avons besoin de calibrer la boussole, cela prend environ 2 minutes.")); Serial.print(" "); Serial.println(F("Au cours du calibrage, vous devez faire pivoter et tourner le capteur en permanence pendant 2 minutes.")); Serial.print(" "); Serial.println(F("envoyer l'information ready.")); while (!Serial.find("ready")); Serial.println(" "); Serial.println("ready"); Serial.println("demmarrage de l'echantillonnage......"); Serial.println("attendez s'il vous plait ......"); get_calibration_Data (); Serial.println(" "); Serial.println("paramètre de calibrage du compas"); Serial.print(mx_centre); Serial.print(" "); Serial.print(my_centre); Serial.print(" "); Serial.println(mz_centre); Serial.println(" "); } void get_calibration_Data () { for (int i = 0; i < sample_num_mdate; i++) { get_one_sample_date_mxyz(); // vous pouvez activer la visualisation de l'echantillonnage // en desactivant les commentaires ci-dessous /* Serial.print(mx_sample[2]); Serial.print(" "); Serial.print(my_sample[2]); Serial.print(" "); Serial.println(mz_sample[2]); */ //trouver de la valeur max if (mx_sample[2] >= mx_sample[1])mx_sample[1] = mx_sample[2]; if (my_sample[2] >= my_sample[1])my_sample[1] = my_sample[2]; if (mz_sample[2] >= mz_sample[1])mz_sample[1] = mz_sample[2]; if (mx_sample[2] <= mx_sample[0])mx_sample[0] = mx_sample[2]; if (my_sample[2] <= my_sample[0])my_sample[0] = my_sample[2]; if (mz_sample[2] <= mz_sample[0])mz_sample[0] = mz_sample[2]; } mx_max = mx_sample[1]; my_max = my_sample[1]; mz_max = mz_sample[1]; mx_min = mx_sample[0]; my_min = my_sample[0]; mz_min = mz_sample[0]; mx_centre = (mx_max + mx_min) / 2; my_centre = (my_max + my_min) / 2; mz_centre = (mz_max + mz_min) / 2; } void get_one_sample_date_mxyz() { getCompass_Data(); mx_sample[2] = Mxyz[0]; my_sample[2] = Mxyz[1]; mz_sample[2] = Mxyz[2]; } void getAccel_Data(void) { accelgyro.getMotion9(&ax, &ay, &az, &gx, &gy, &gz, &mx, &my, &mz); Axyz[0] = (double) ax / 16384; Axyz[1] = (double) ay / 16384; Axyz[2] = (double) az / 16384; } void getGyro_Data(void) { accelgyro.getMotion9(&ax, &ay, &az, &gx, &gy, &gz, &mx, &my, &mz); Gxyz[0] = (double) gx * 250 / 32768; Gxyz[1] = (double) gy * 250 / 32768; Gxyz[2] = (double) gz * 250 / 32768; } void getCompass_Data(void) { I2C_M.writeByte(MPU9150_RA_MAG_ADDRESS, 0x0A, 0x01); //enable the magnetometer delay(10); I2C_M.readBytes(MPU9150_RA_MAG_ADDRESS, MPU9150_RA_MAG_XOUT_L, 6, buffer_m); mx = ((int16_t)(buffer_m[1]) << 8) | buffer_m[0] ; my = ((int16_t)(buffer_m[3]) << 8) | buffer_m[2] ; mz = ((int16_t)(buffer_m[5]) << 8) | buffer_m[4] ; Mxyz[0] = (double) mx * 1200 / 4096; Mxyz[1] = (double) my * 1200 / 4096; Mxyz[2] = (double) mz * 1200 / 4096; } void getCompassDate_calibrated () { getCompass_Data(); Mxyz[0] = Mxyz[0] - mx_centre; Mxyz[1] = Mxyz[1] - my_centre; Mxyz[2] = Mxyz[2] - mz_centre; } |
Téléchargement du programme:
Grove 101020079 capteur IMU***
Visualisation des données sur le terminal de IDE Arduino après le lancement du programme ci-dessus
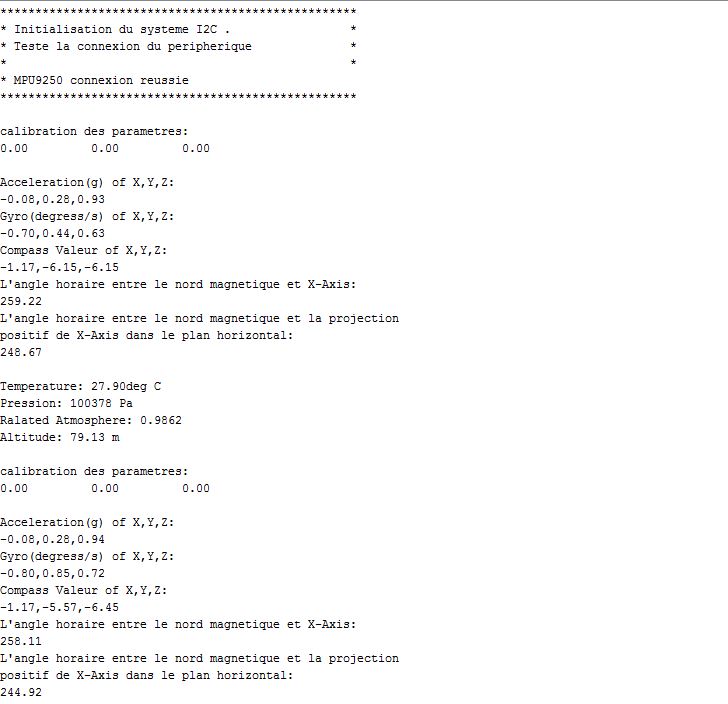 .
.![]()
Source pour la réalisation de cet article |
.
BMP180 datasheet
seeedstudio
Gotronic
.
Retour au sommaire![]()
A savoir sur l’utilisation des informations pour le module
|
A savoir sur l’utilisation des informations :
Les informations sur les caractéristiques et spécificités du module IMU Grove 101020079 qui sont fournis sur cette page correspondent aux informations des fiches techniques du constructeur si malgré le soin apporté à la réalisation de cet article une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable.
Les programmes , schémas et autres que ceux donnés par le constructeur font parti des montages utiles à nos applications si malgré le soin apporté à nos montages une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable .
L’ensemble des informations techniques de cet article a été utilisé pour nos applications, elles vous sont fournies comme un exemple de document de travail. Mais nous ne pourrions être tenu responsables d’une mauvaise utilisation de celle-ci.
.
Retour au sommaire
Pour tout probléme |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour au sommaire.