Sommaire :
- Communication en bluetooth d’une tablette vers Arduino
- Mit Inventor création d’un controlPad
- Mit inventor, le capteur d’orientation ( en cours )
- 2023-01-08 : Contrôler votre Smartphone avec le capteur de luminosité
- 2022-11-05 : 1/5 – Mit inventor creation d’un joystick analogique pour Arduino
- 2023-01-19 : 2/5 – Mit inventor un joystick analogique pour Arduino ,decryptage de la chaine de positionnnement .
- 2022-09-16 : Mit inventor le changement de page
- Retour au menu Vidéo
Communication en bluetooth d’une tablette vers Arduino
|
Mise à jour le 08/10/2022.
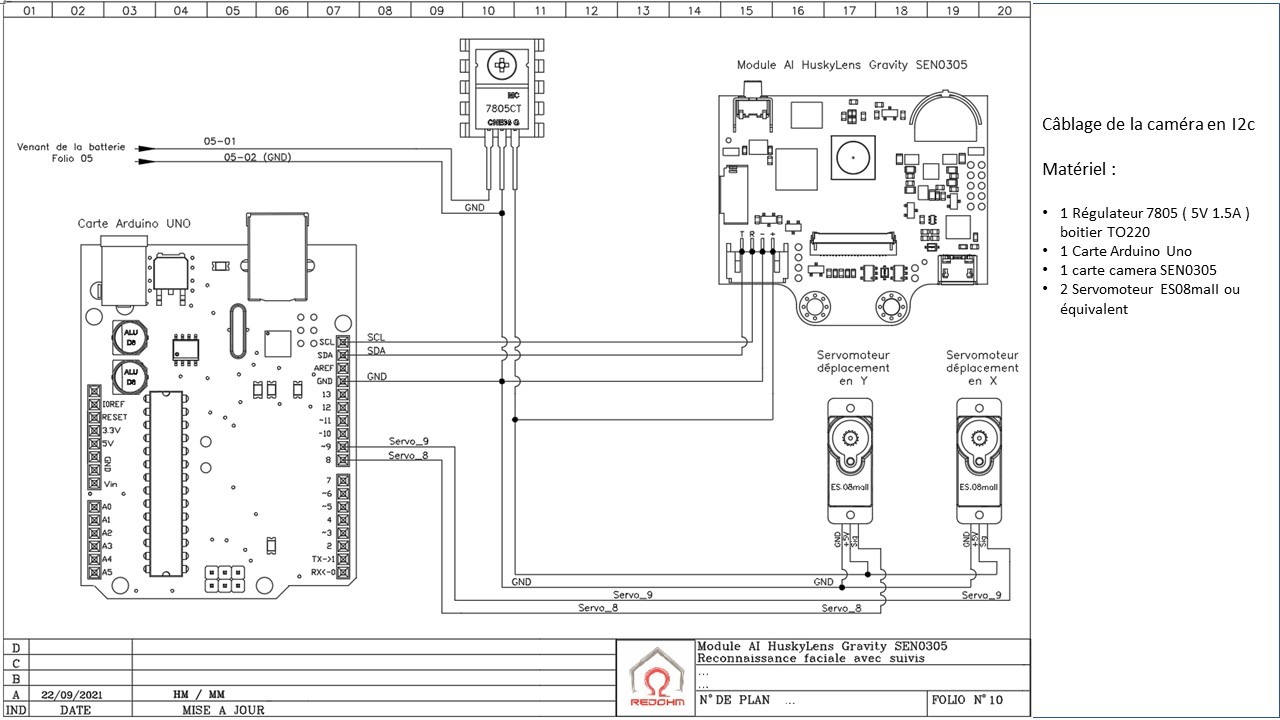
Dans ce tuto ,nous allons travailler sur la communication entre une tablette sous Android et une carte Arduino équipée d’une carte bluetooth de type HC06
Nous allons donc étudier la partie interface sous Mit App Inventor pour la tablette et le traitement des informations avec l’ide Arduino
.
télécharger les fichiers . Retour au sommaire
Mit Inventor création d’un controlPad |
.
Mise à jour 11/10/2022.
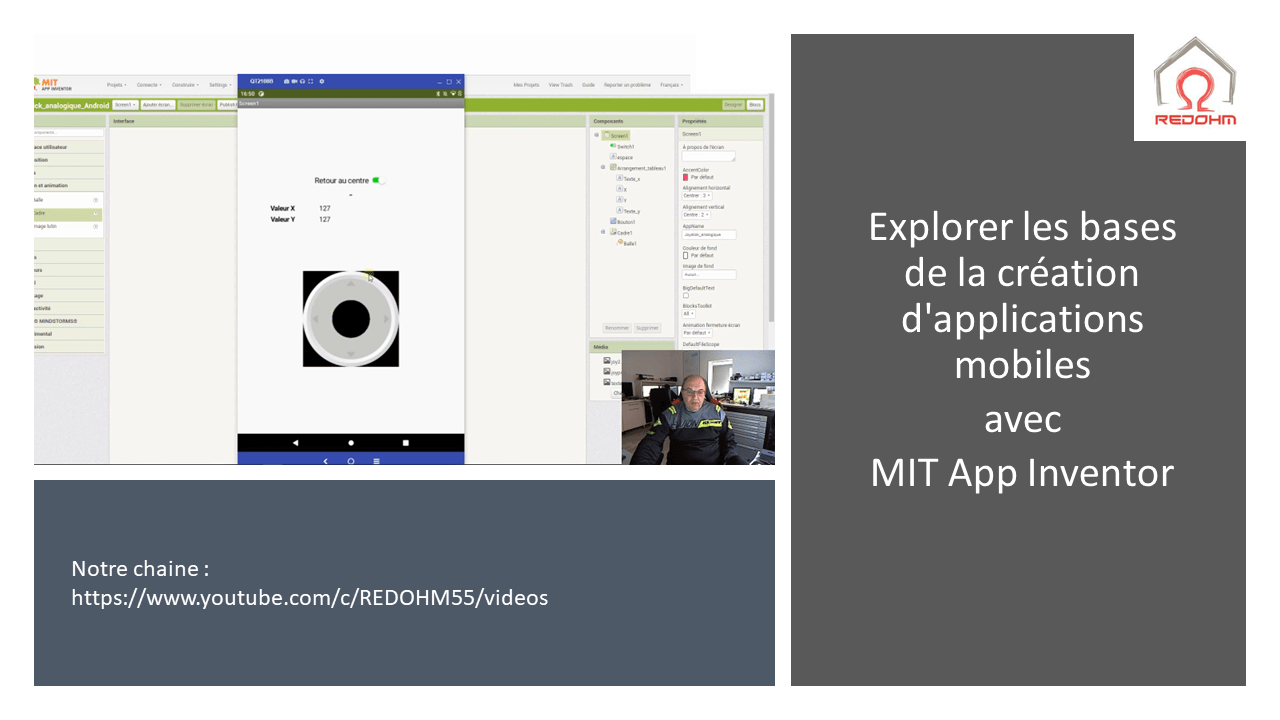
Cette vidéo est un tutoriel pratique détaillant la création d’une interface de contrôle pour piloter un robot mobile via une carte Arduino, utilisable sur tablette ou smartphone. Elle débute par une présentation générale du projet , suivie d’une session sur la réalisation de l’interface utilisateur avec le Designer dans MIT App Inventor . La majeure partie de la vidéo se concentre sur la programmation des blocs dans MIT App Inventor, illustrant comment les différents éléments de l’interface peuvent être programmés pour contrôler le robot. Le tutoriel se conclut avec un essai pratique du système et une conclusion , offrant une démonstration concrète de l’application en action et résumant les points clés appris.
télécharger les fichiers Retour au sommaire
2023-01-08- Mit inventor contrôler votre Smartphone avec le capteur de luminosité |
Dans ce tutoriel, nous allons étudier sur Mit Inventor comment contrôler votre smartphone avec le capteur de luminosité ou bien retranscrire ces informations vers votre carte Arduino ou tout autre carte microcontrôleur. Avec ce type de capteur, nous pouvons créer un luxmètre ou d’autres applications qui réagissent avec la lumière. On peut bien évidemment s’en servir aussi comme capteur de proximité
.
télécharger les fichiers Retour au sommaire
2022-11-05- Mit inventor creation d’un joystick analogique pour
|
Dans ce tutoriel nous allons étudier sur Mit Inventor comment créer un joystick analogique sur votre tablette ou sur un smartphone afin de pouvoir piloter en Bluetooth une unité mobile avec la carte microcontrôleur Arduino. Vous aurez donc un ensemble de 5 tutoriels traitant de ce type de pilotage.
.
télécharger les fichiers Retour au sommaire
2023-01-19- Mit inventor un joystick analogique pour Arduino decryptage de la chaine de positionnnement 2/5 |
Dans ce tutoriel, nous allons étudier comment décrypter une chaîne de caractères de type String envoyé par Bluetooth depuis votre smartphone ou votre tablette vers arduino. Cette chaîne sera donc décryptée par arduino pour extraire les valeurs x et y de déplacement du joystick virtuel de votre application nous permettant de piloter un robot mobile , une plateforme ou tout autre objet qui peut être piloté . Cette vidéo nous permet de mettre en lumière les fonctions ou les méthodes à utiliser comme indexOf , concat ,substring.
.
Retour au sommaire
2022-09-16- Mit inventor le changement de page |
Vous trouverez dans cette vidéo les informations nécessaires pour la création de plusieurs pages sur Mit Inventor et surtout la possibilité de naviguer entre elle.
Mit App Inventor est un soft pour la création d’applications pour toutes les plateformes basées sur Microsoft , qui évite le langage complexe de codage en bloc de construction visuelle par glisser-déposer.
.
Retour au sommaire