
***
Maya la passion de bien faire – RedOhm
Mise à jour le 09/08/2017
Sommaire :
- 31/01/2017 Etude des bras et avant bras ( Diaporama )
- 04/02/2017 Etude et réalisation du support carte pour la version 1.00 de Maya
- 10/02/2017 Suite de l’étude des bras et avant bras avant essais
- 12/02/2017 L’étude se poursuit sur le réalisation du bras ( Diaporama )
- 18/02/2017 L’étude de la partie mécanique du coude ( plan mécanique )
- 20/02/2017 Etat de l’avancement de la rotation du poignet ( Diaporama )
- 24/02/2017 Rotation du thorax et motorisation de celui-ci et réservation dans le buste pour l’installation d’un pico-projecteur ( Photo )
- 25/02/2017 Schéma de principe du circuit de contrôle ( Photo du schéma de principe )
- 18/03/2017 Impression du haut du bras ( Diaporama )
- 19/03/2017 Modification de la rotation du buste ( Photo et diaporama )
- 08/04/2017 Essai du bras de Maya.
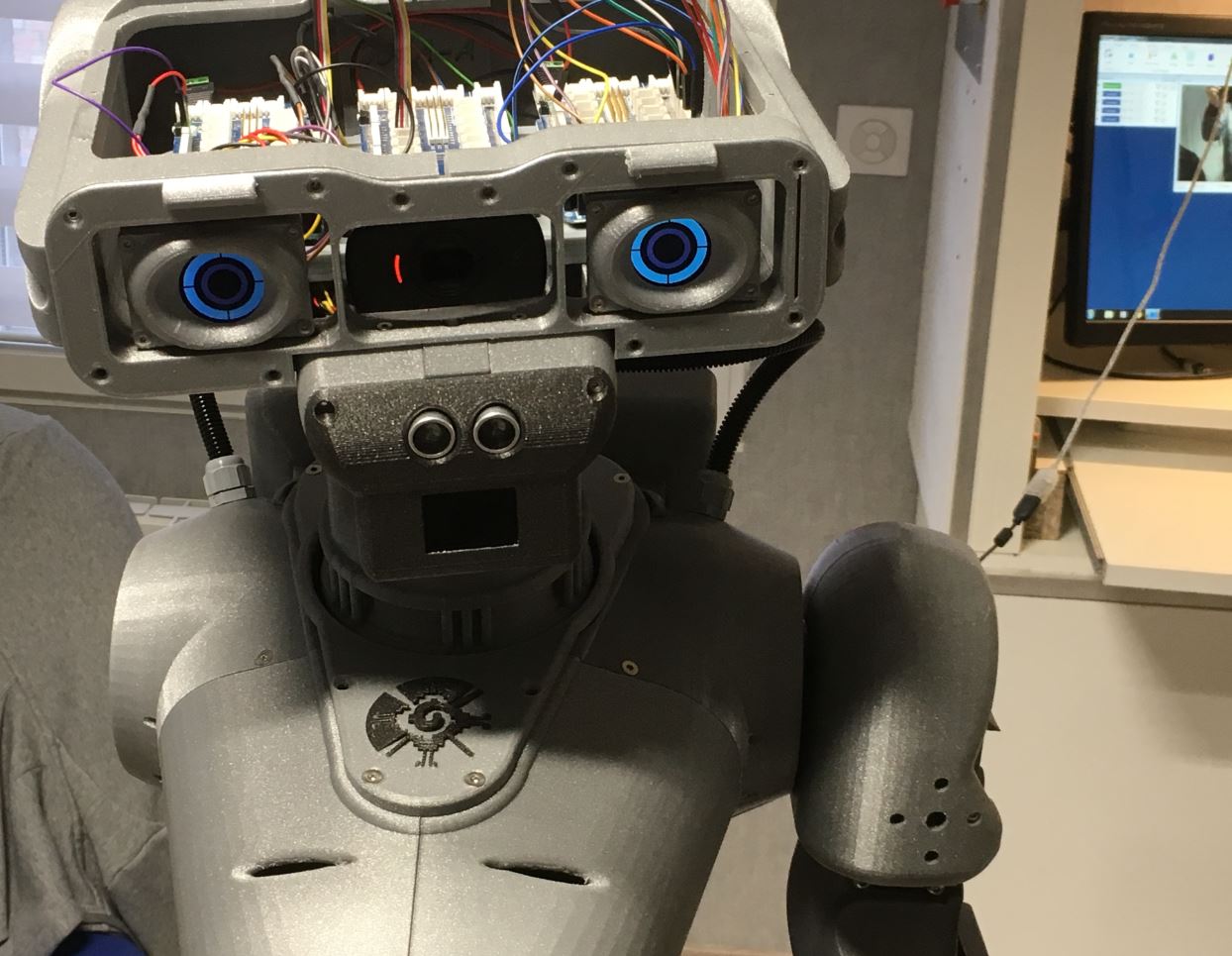
- 22/04/2017 Fonctionnement manuel des différents mouvements de la tête ( Vidéo ) .
- 29/04/2017 Maya un robot avec de la voix ( Photo ) .
- 06/05/2017 Maya groupe de propulsion châssis M001 ( Photo ).
- 11/06/2017 Coffret tuning pour variateur de propulsion ( Diaporama ).
- 06/08/2017 Présentation du châssis extérieur pour Maya ( Vidéo ) .
- 08/08/2017 Vue du fonctionnement de la main de Maya ( Vidéo ) .
| Retour au sommaire principal |
![]()
31/01/2017 Etude des bras et avant bras |
Voici la suite de l’étude de la partie du bras et avant bras de Maya. Comme vous avez pu l’observer sur le dessin les servomoteurs sont en entraînement direct. Le bras est rattaché à l’épaule par un servomoteur en entraînement direct (les seules démultiplications sont à l’intérieur du servomoteur).Celui-ci assurera la rotation de l’épaule, un second servomoteur monté dans la cage de l’épaule assurera l’élévation du bras. Le type de servomoteur choisi nous permettra de porter des charges relativement conséquentes (les tests nous confirmeront le poids des charges déplacées).
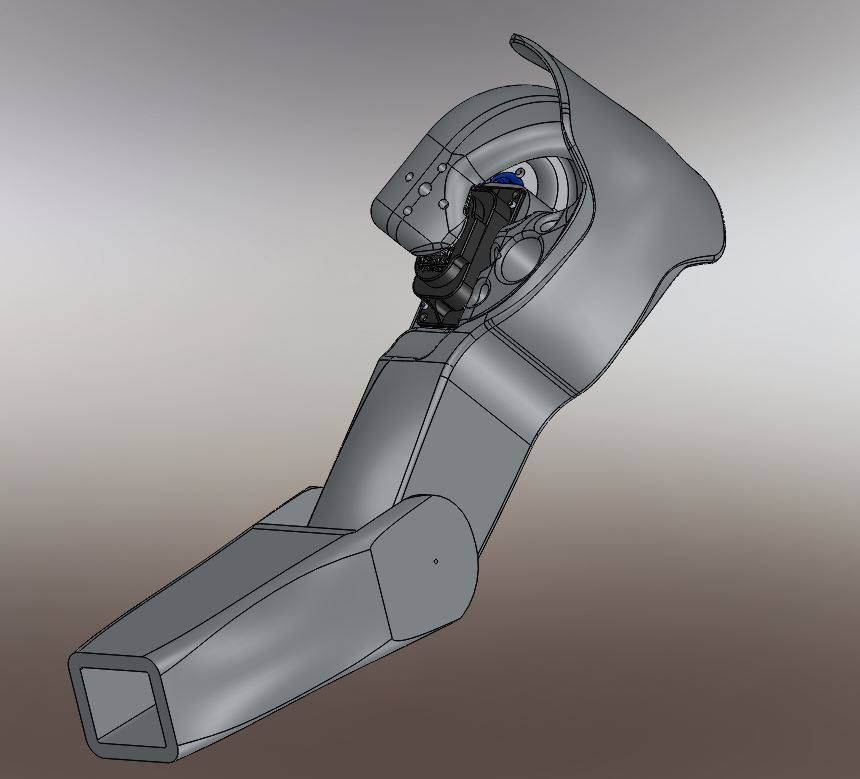
Etude des bras et avant bras du robot Maya – RedOhm
–
En voir plus , diaporama des bras et avant bras état du projet au 31/01/2017
–
| Retour au sommaire |
![]()
04/02/2017 Etude et réalisation du support carte
|
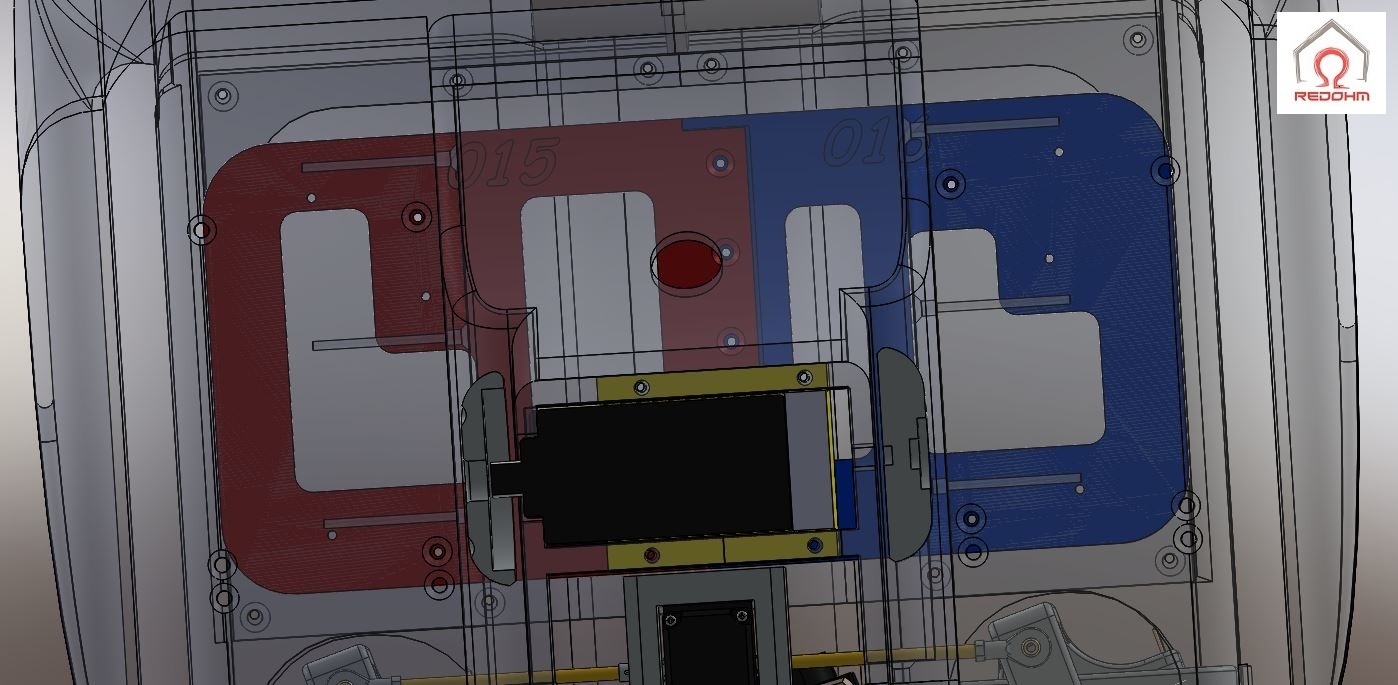
Maya support carte Arduino Version 1.00 ( position de carte dans la boite crânienne ) – RedOhm -003
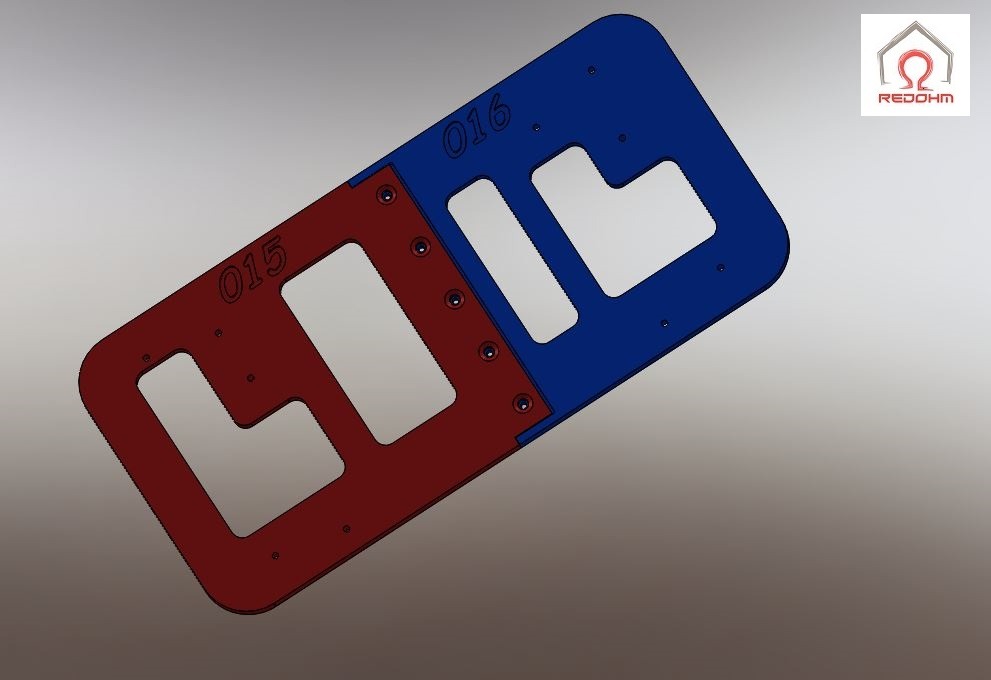
Maya soutien carte arduino Version 1.00 – RedOhm -002
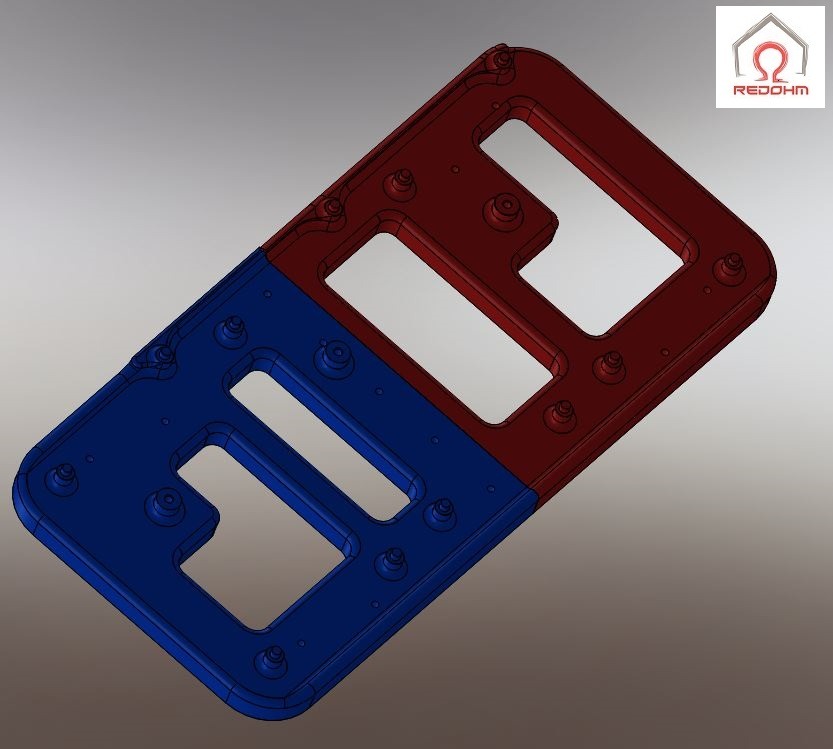
Maya soutien carte arduino Version 1.00 – RedOhm -001
| Retour au sommaire |
![]()
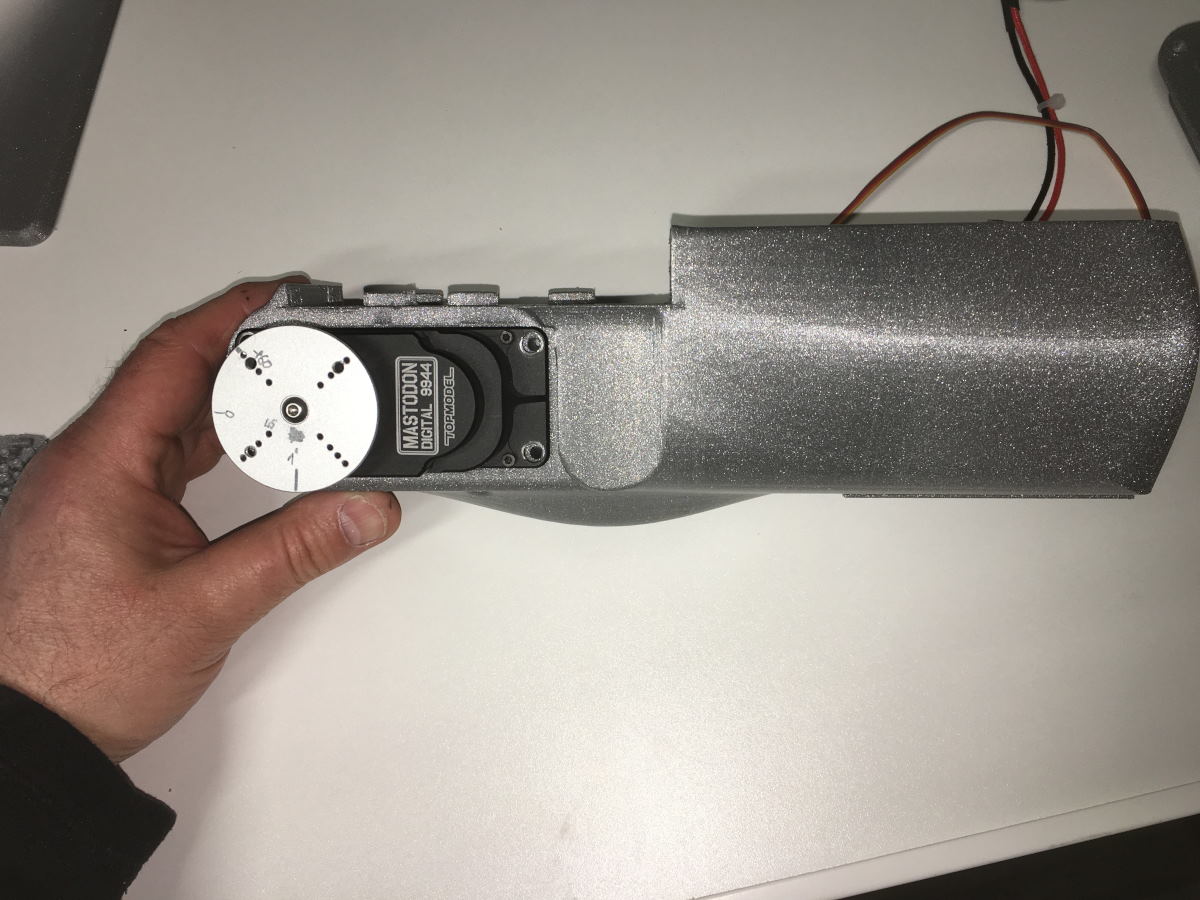
10/02/2017 Suite de l’étude des bras et avant bras avant essais |
Nous voilà à une étape très importante, la fabrication des bras, l’étude étant terminée, nous allons commencer l’impression pour tester la résistance et la mobilité de l’ensemble. La motorisation du haut du bras est assurée par un servomoteur Mastodon 9944 de la marque Topmodel . Ce matériel est disponible chez le distributeur France robotique, Il développe une poussée de 99 kg.cm et affiche une excellente performance. Sur ce matériel, pour avoir le couple maximal, il faudra construire une alimentation de 7.4 V de façon à optimiser le couple de sortie. La partie de l’avant-bras est motorisée par un servo de marque Hitec HS805BB, il développe un couple de 24 kg.cm. Un seul bémol à ce choix et le coût des servomoteurs Mastodon, il sera donc prévu une motorisation avec des servomoteurs moins chers mais évidemment avec des performances plus modestes.

_
Les informations sur les servomoteurs sur -> Les servomoteurs
| Retour au sommaire |
![]()
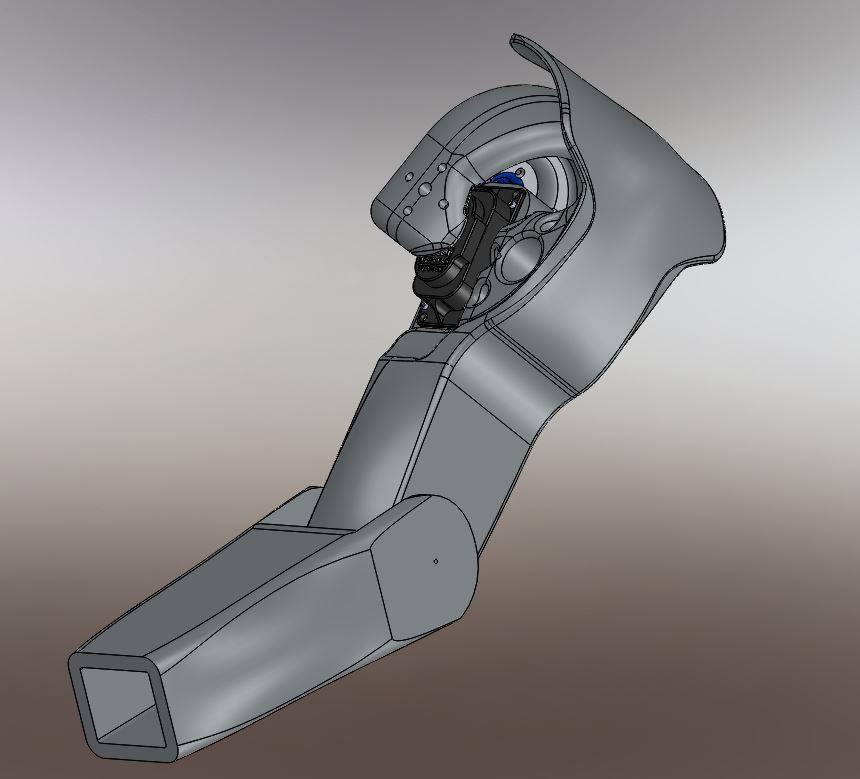
12/02/2017 L’étude se poursuit sur le réalisation du bras |
L’étude se poursuit sur notre robot Maya. Après l’étude du bras et de l’avant-bras terminé, voici maintenant la rotation poignée. La rotation poignée sera motorisée avec un servomoteur de type Hitec 645 MG. Voici un bref rappel des différents servo qui composent le bras, nous avons donc un Mastodont 9944 pour le haut du bras, pour le coude nous avons un servomoteur Hitec HS805BB.
Il sera prévu des motorisations différentes et surtout moins onéreuses, mais je pense avec des performances plus modestes.
Robot Maya état au 12/02/2017 – RedOhm


–
| Retour au sommaire |
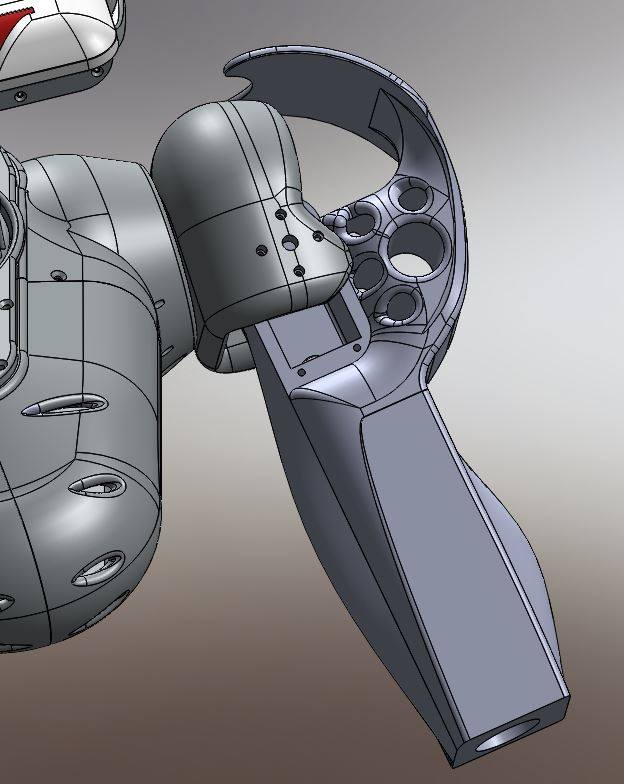
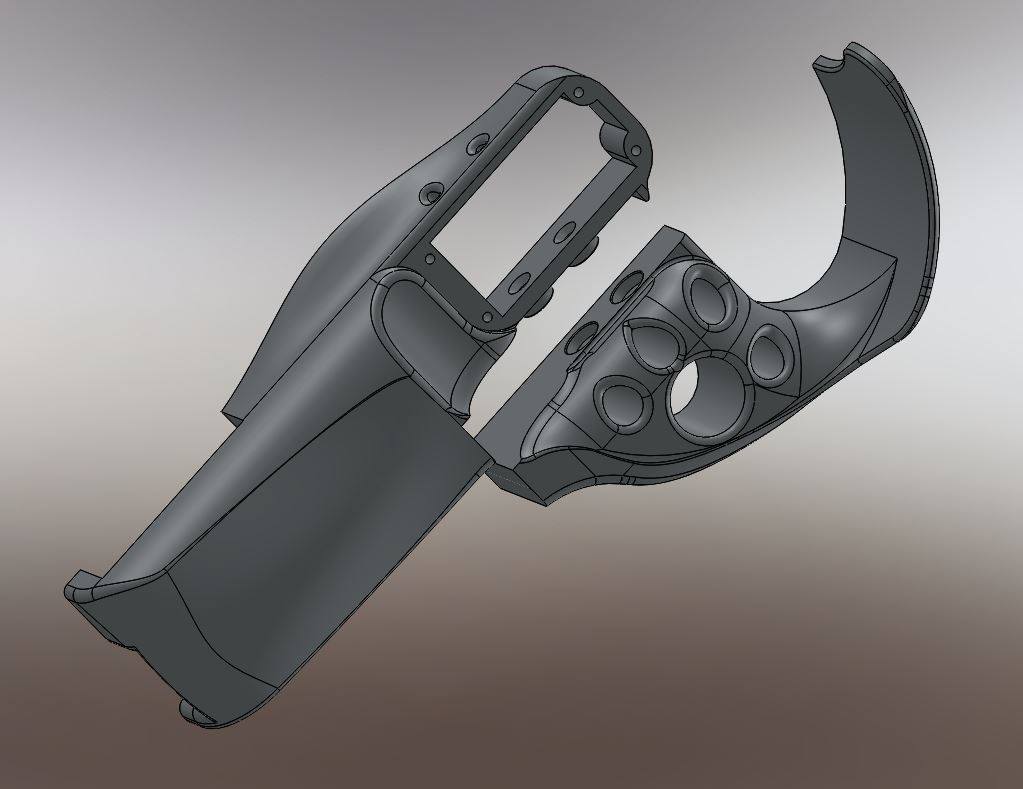
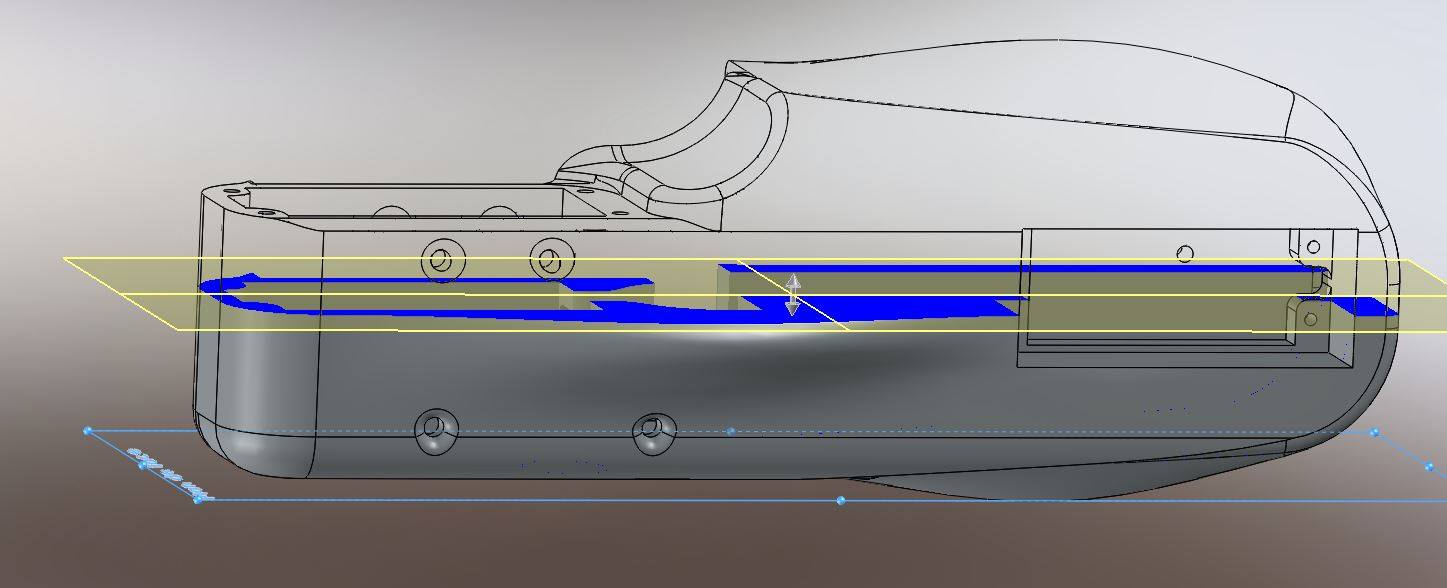
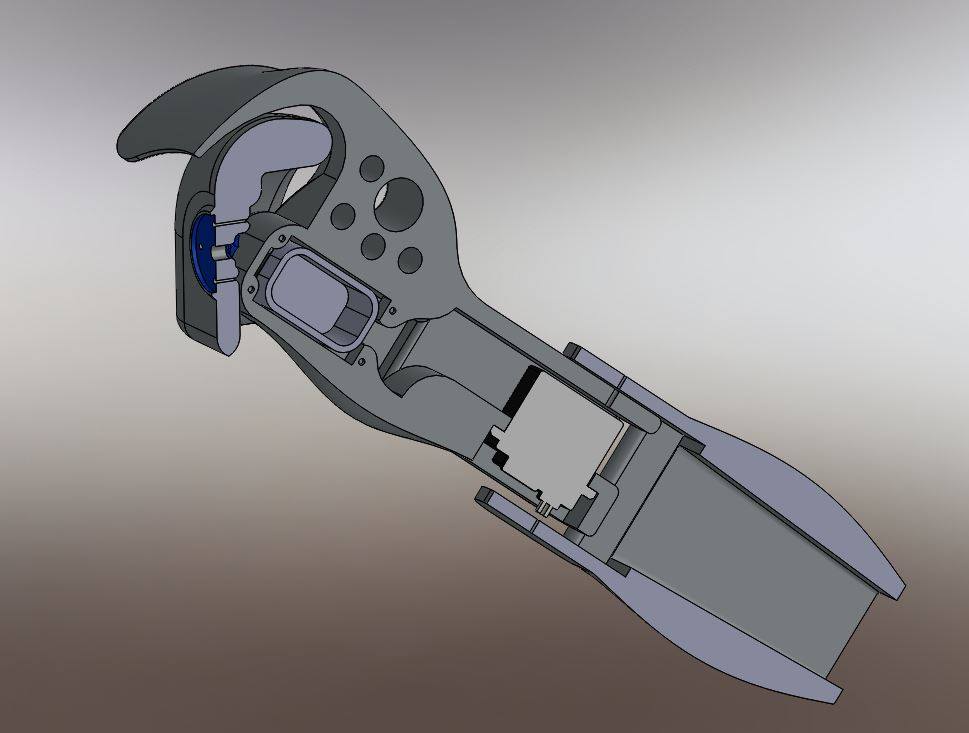
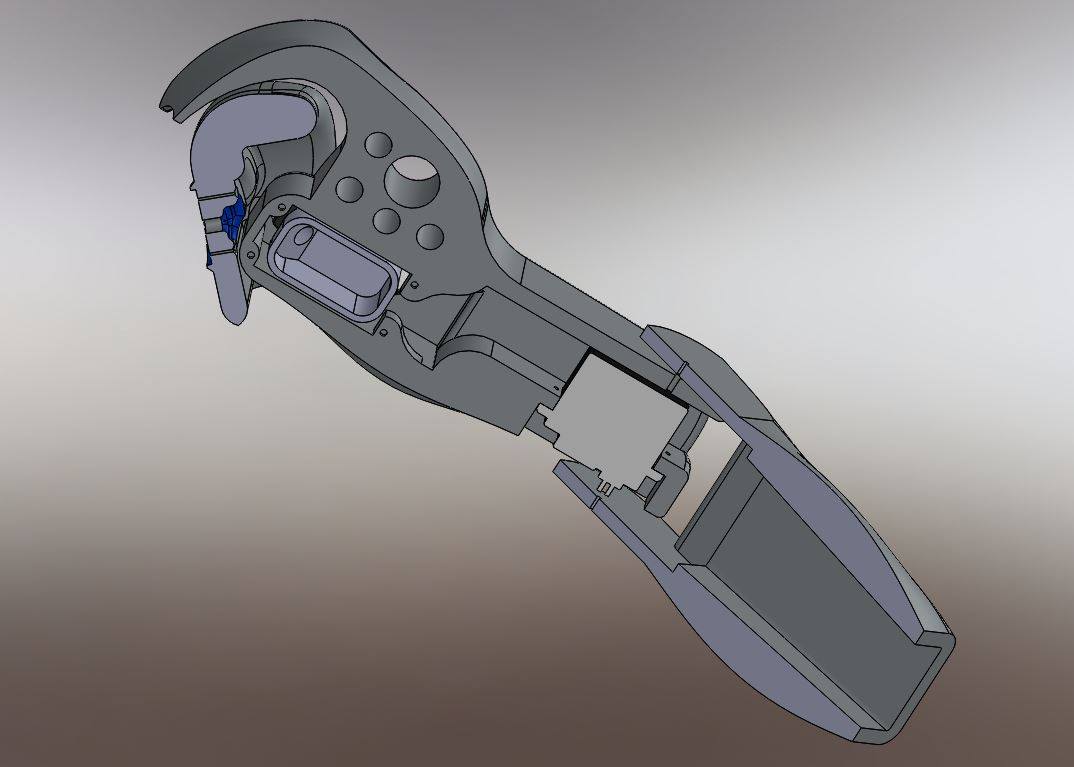
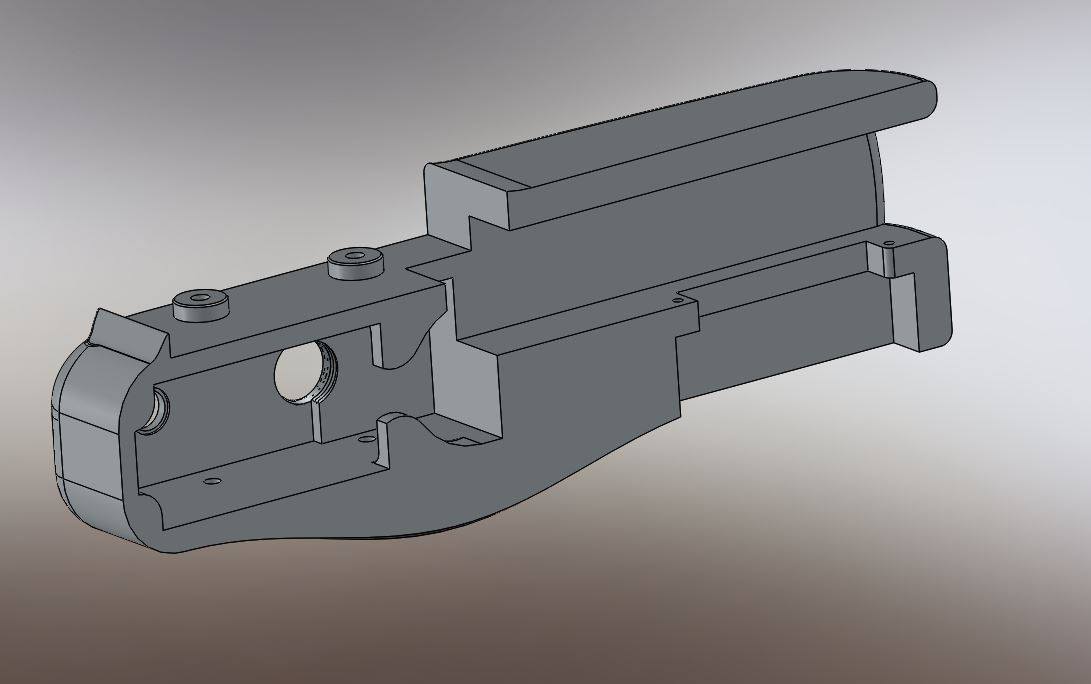
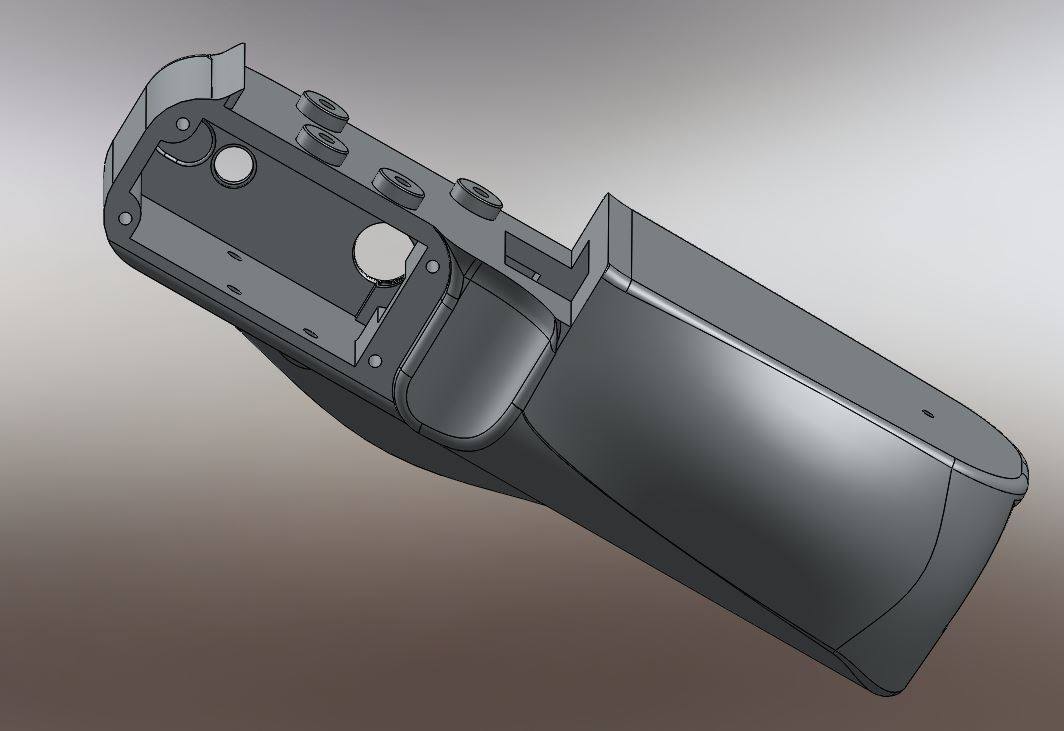
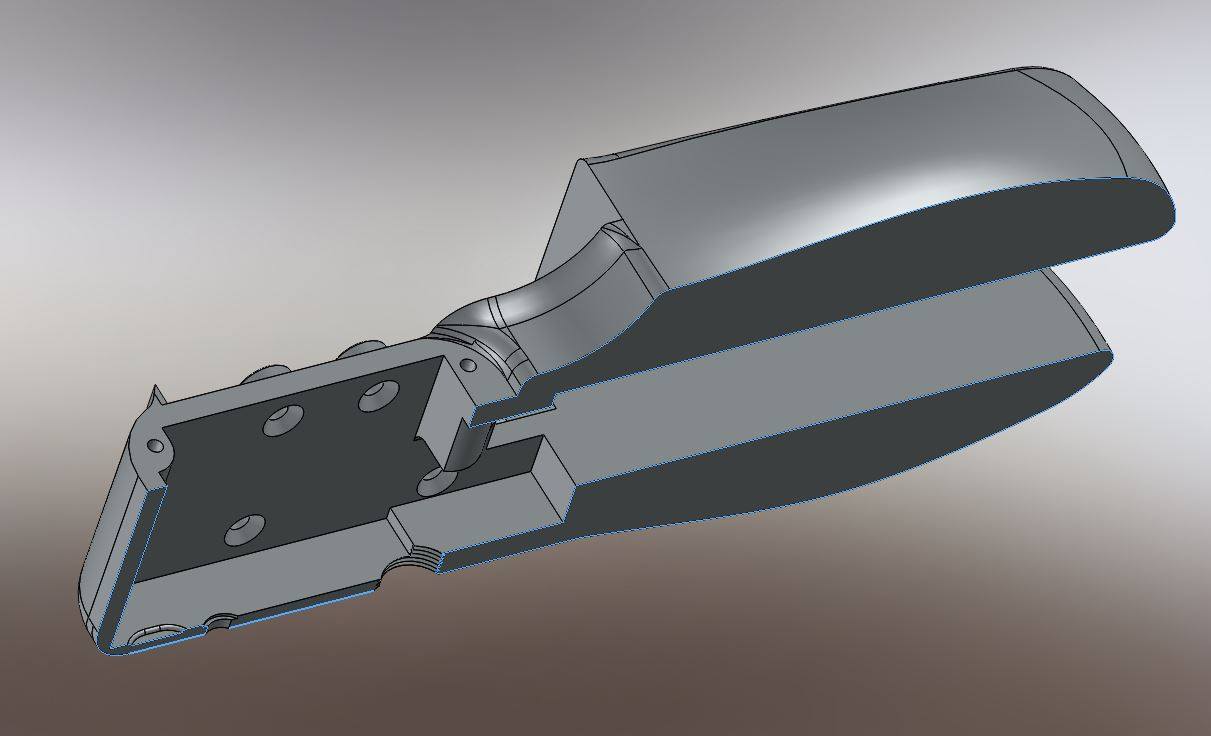
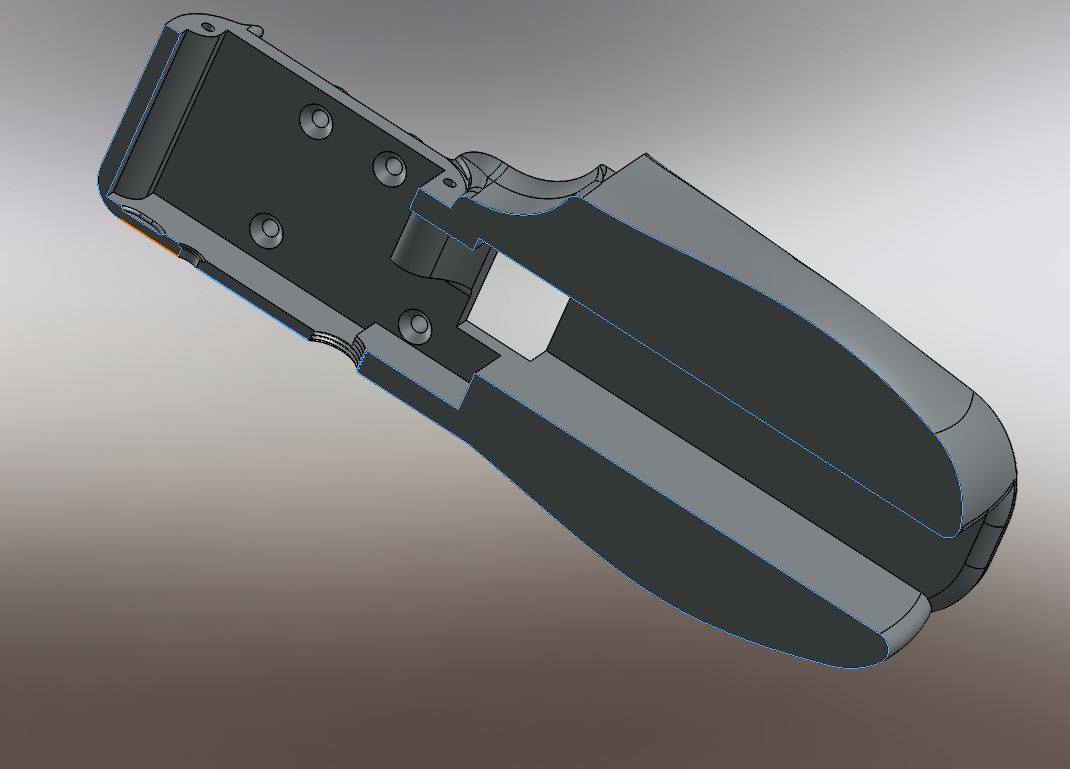
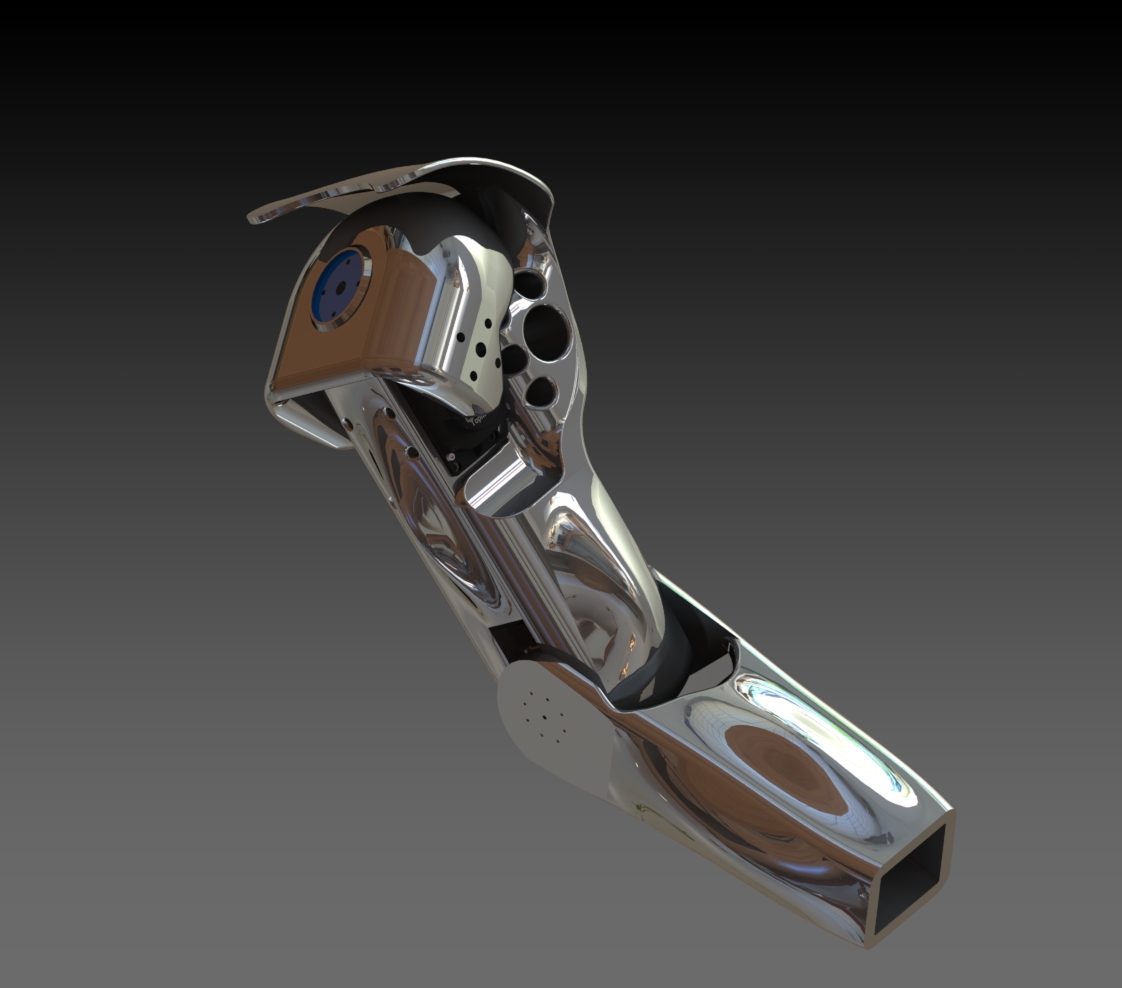
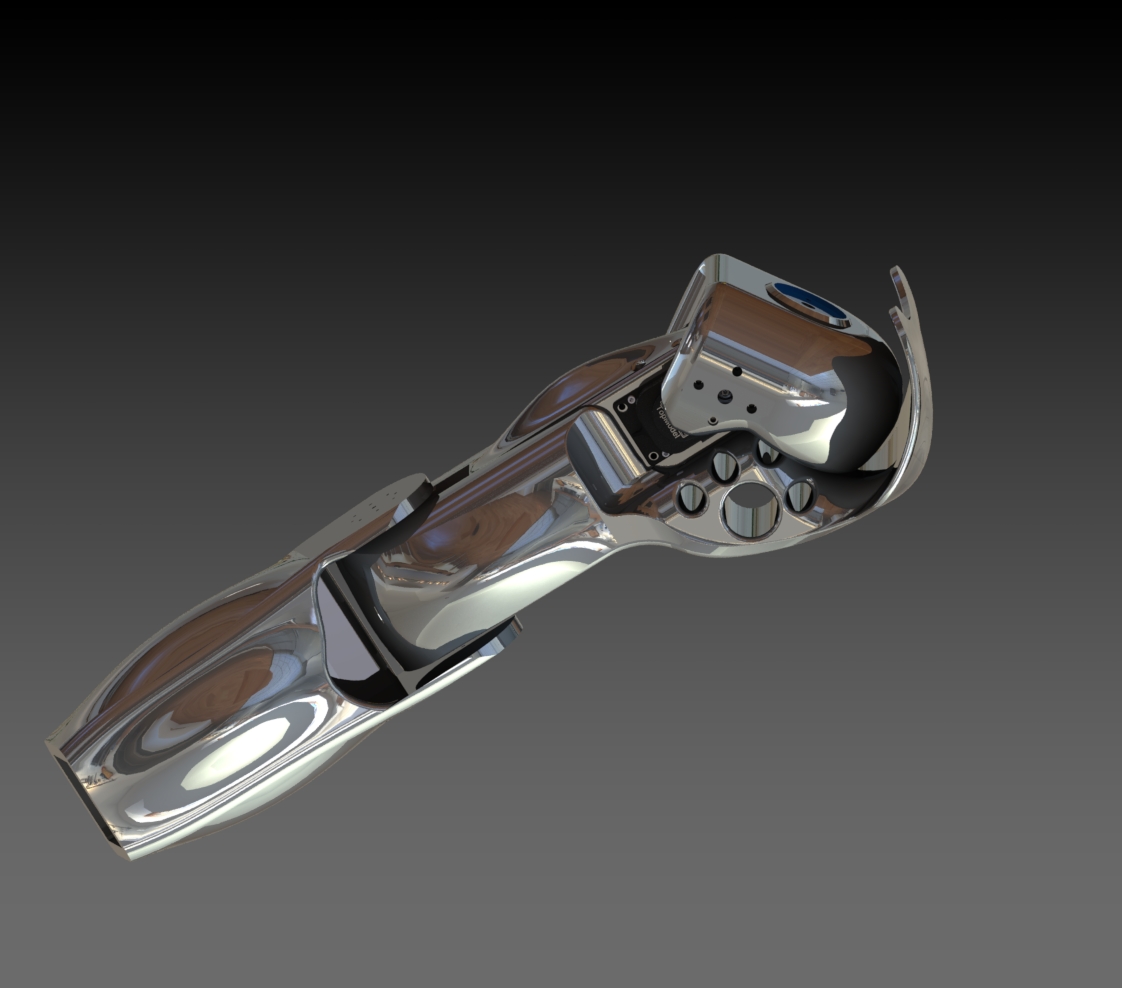
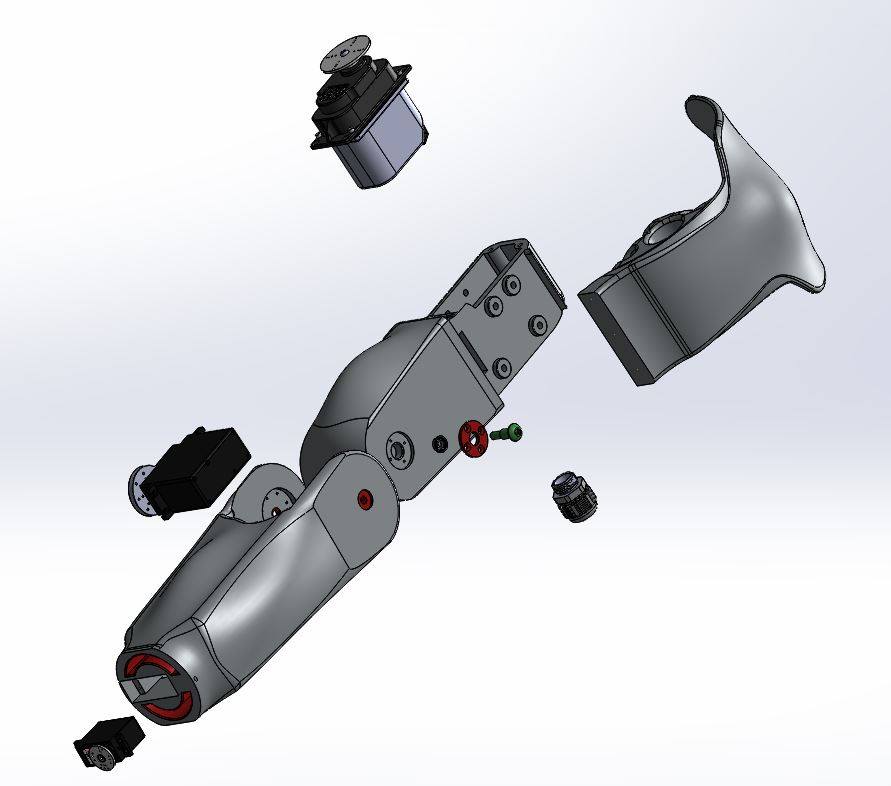
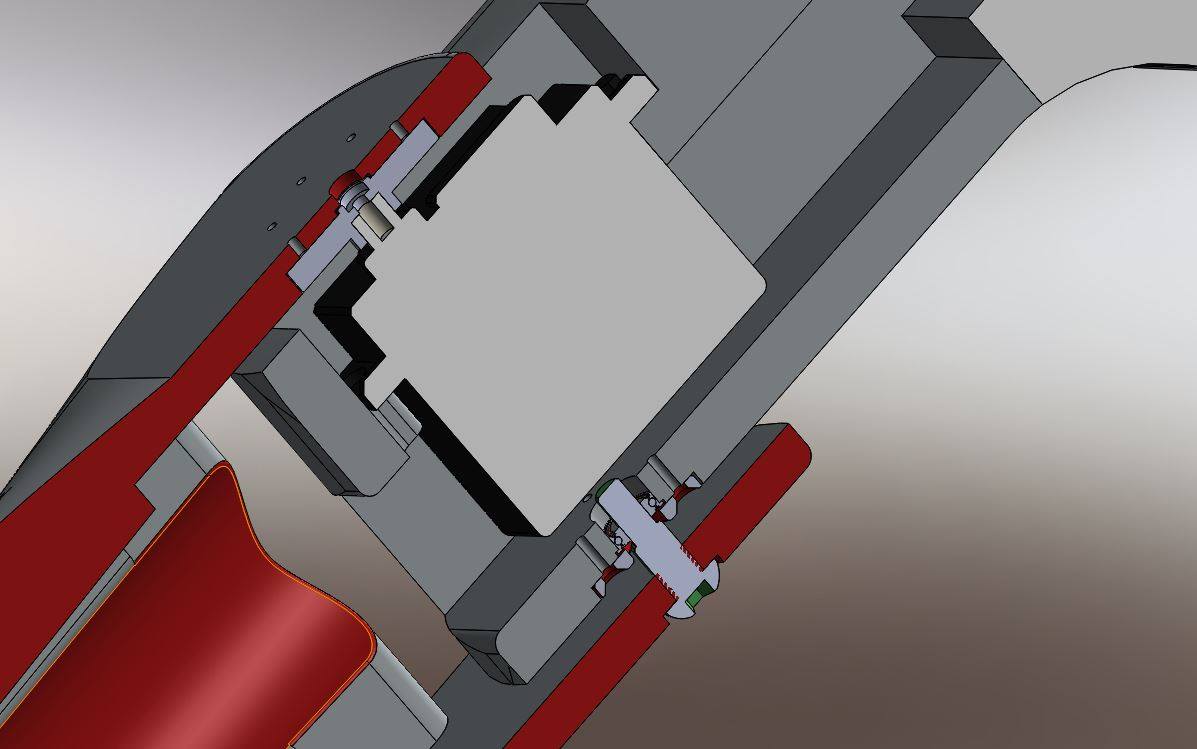
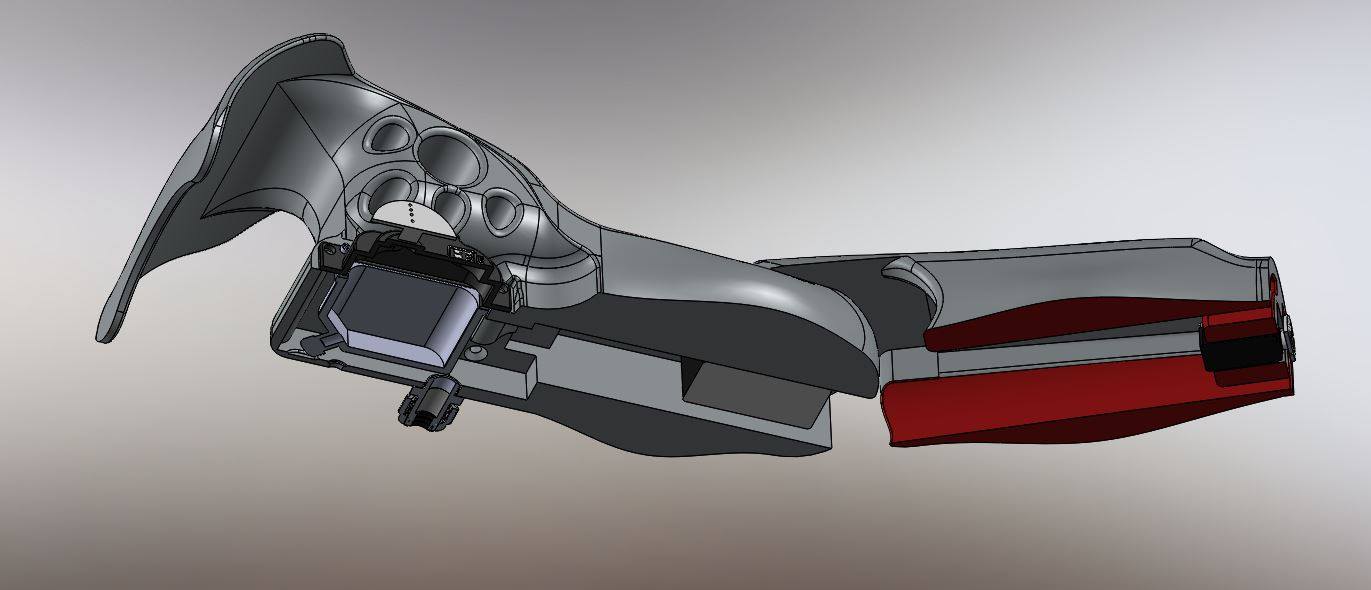
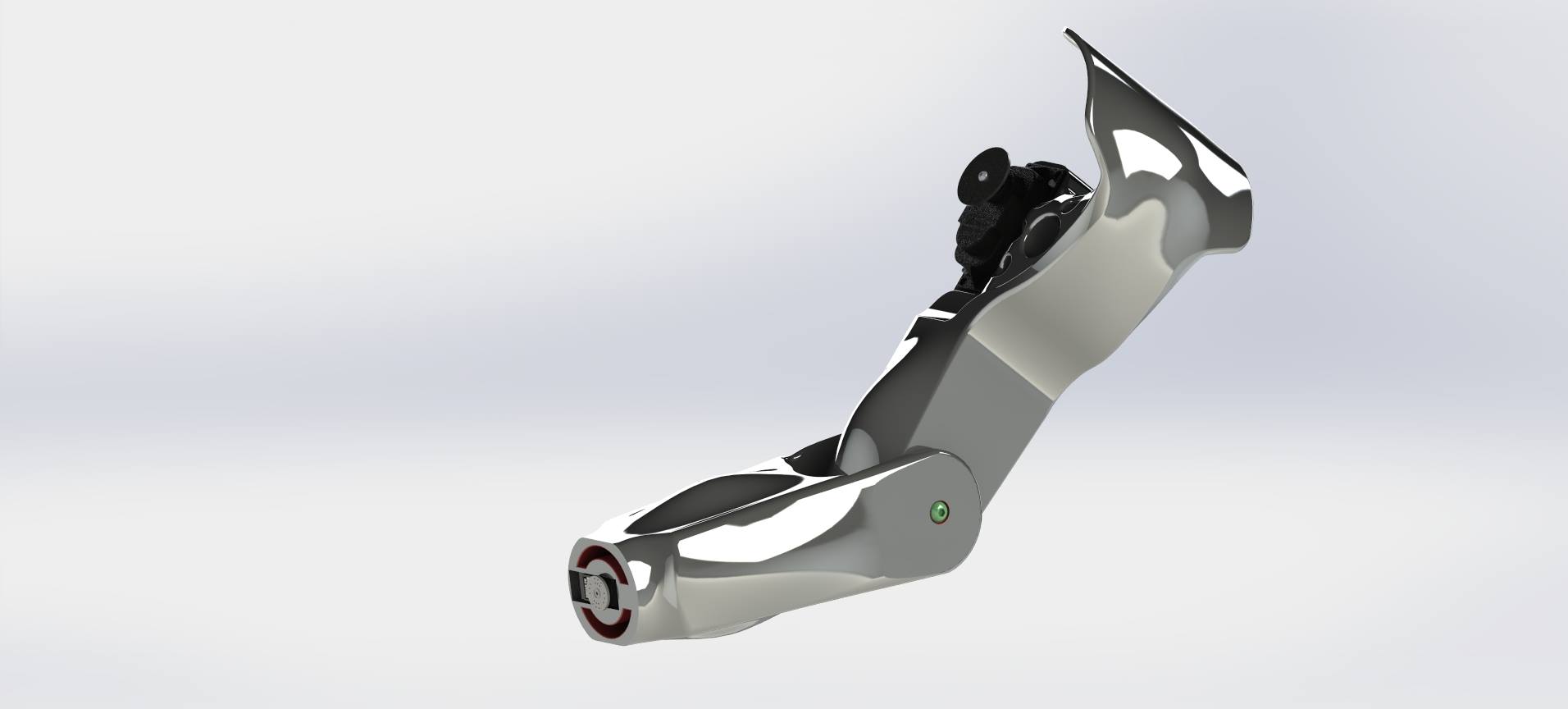
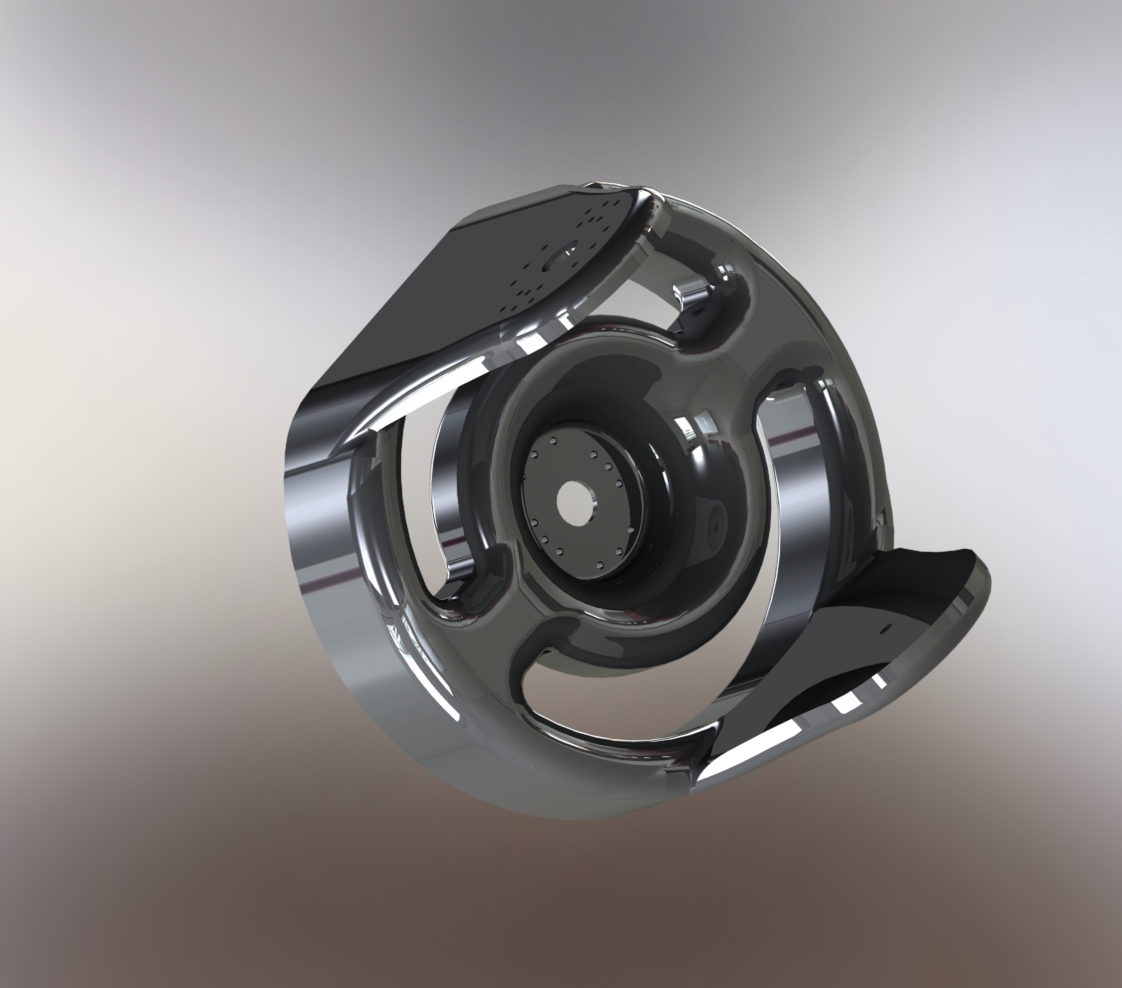
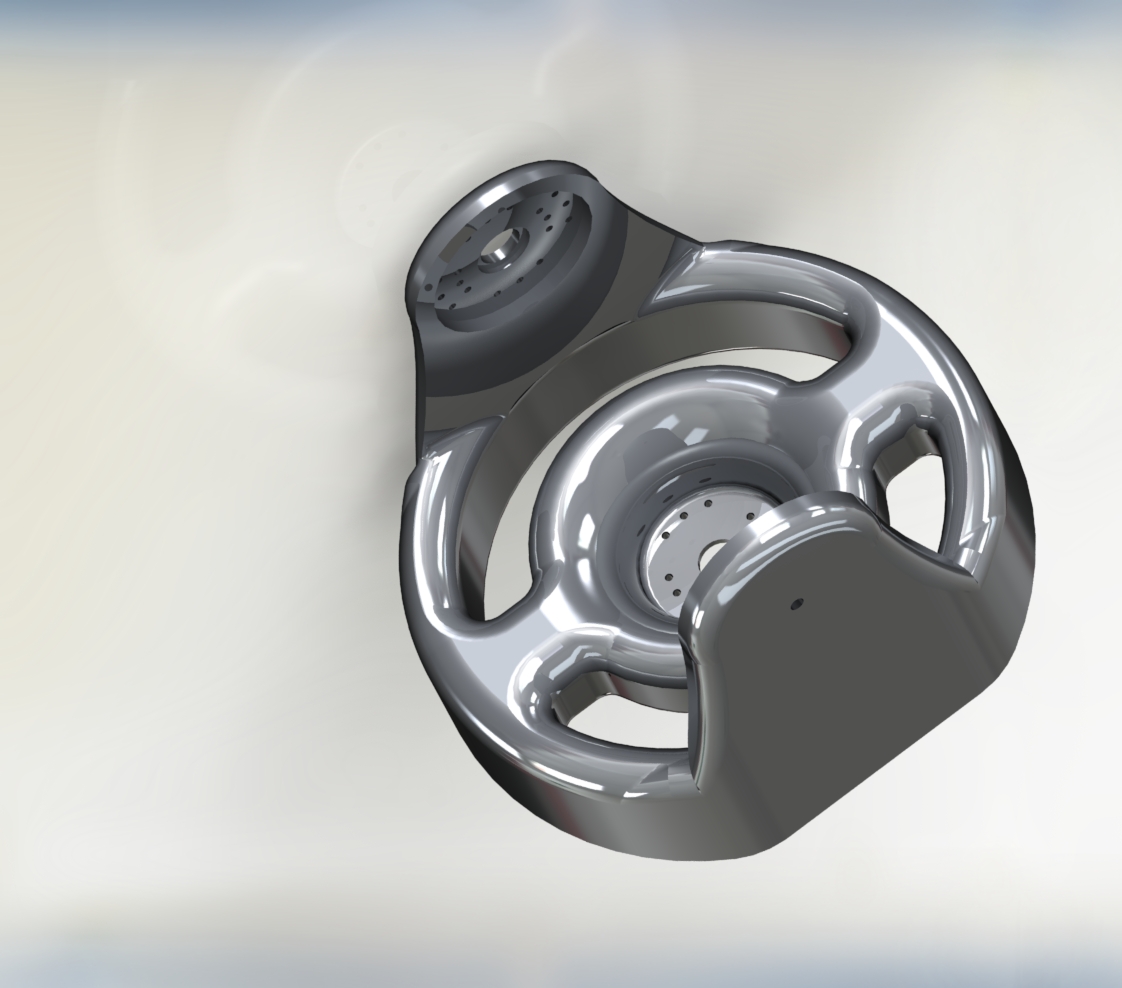
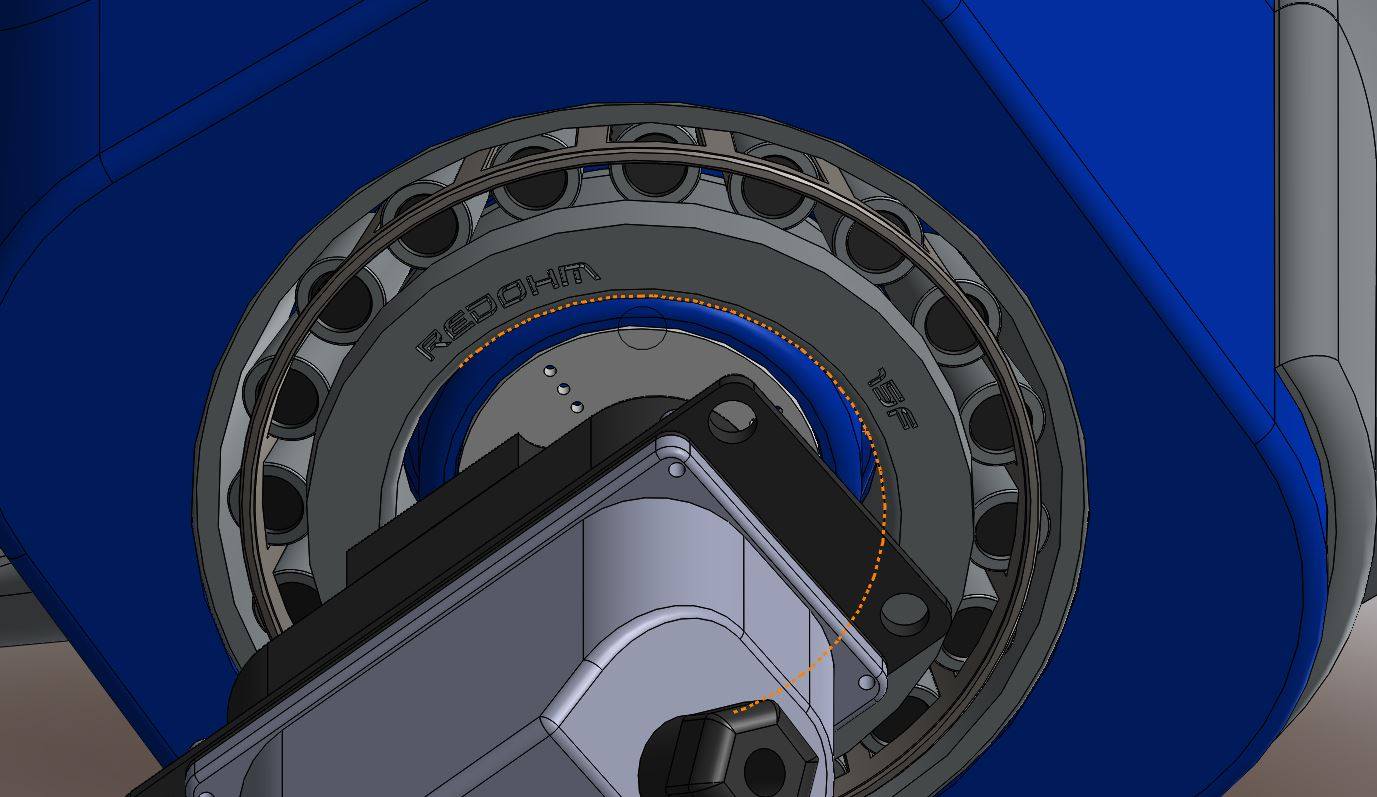
18/02/2017 L’étude de la partie mécanique du coude |
Voici des vues plus détaillées sur la partie mécanique qui compose le coude. Nous pouvons observer sur la figure 1, une pièce pour Le maintien axial de la rotation de l’avant-bras, cette pièce devra être réalisée avec un tour .Les contraintes mécaniques sont trop importantes pour réaliser cette pièce en impression 3D. Vous trouverez sur notre site les plans mécaniques pour pouvoir les réaliser. Ou vous avez la possibilité de commander cette pièce auprès d’un artisan, nous allons vous communiquer le lien. Nous avons déjà fait chiffrer cette pièce qui est de l’ordre de 8 euros. Vous remarquerez que la rotation du coude est supportée par un roulement de type SMF126 ZZ ( prix moyen 8.83€ ) , et enfin l’ensemble est bloqué par une flasque.
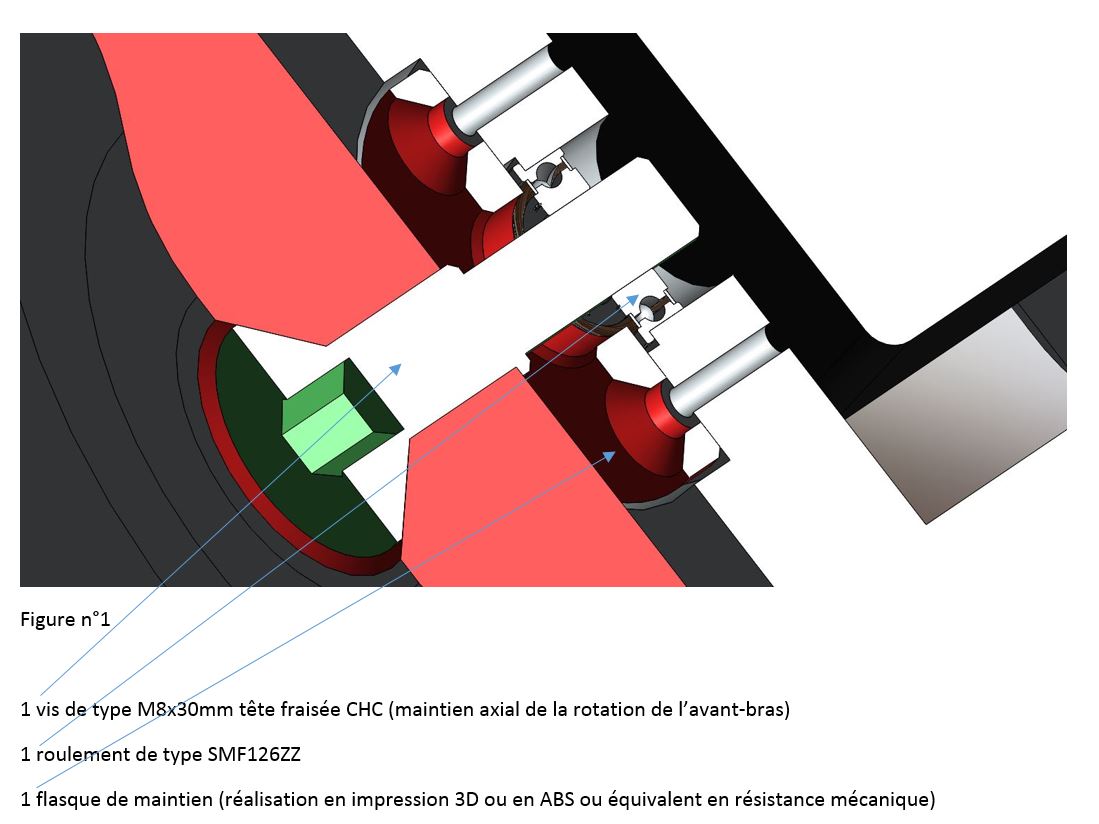
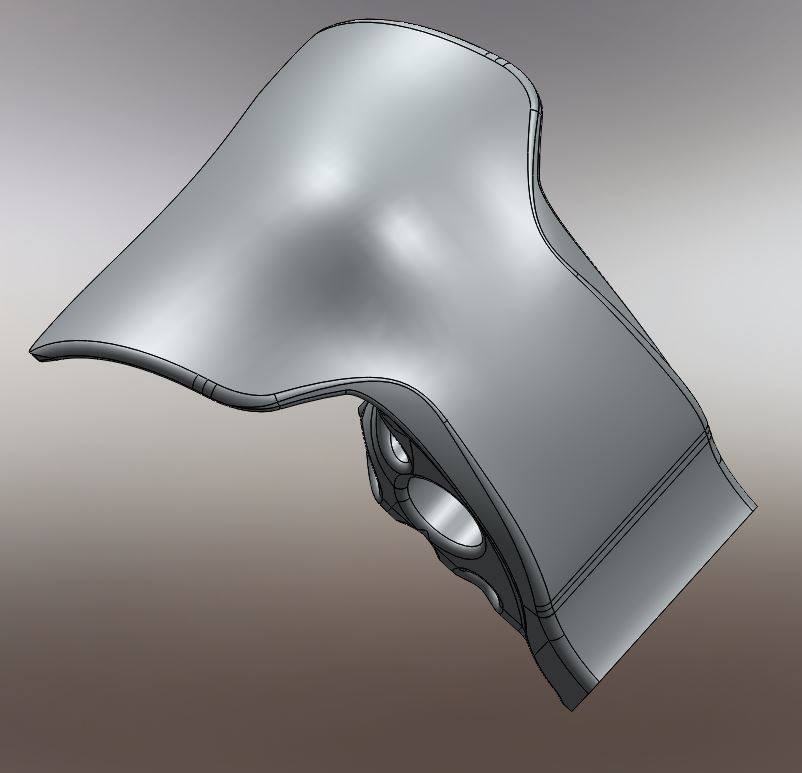
Vue du maintien axial de rotation de l’avant bras – RedOhm
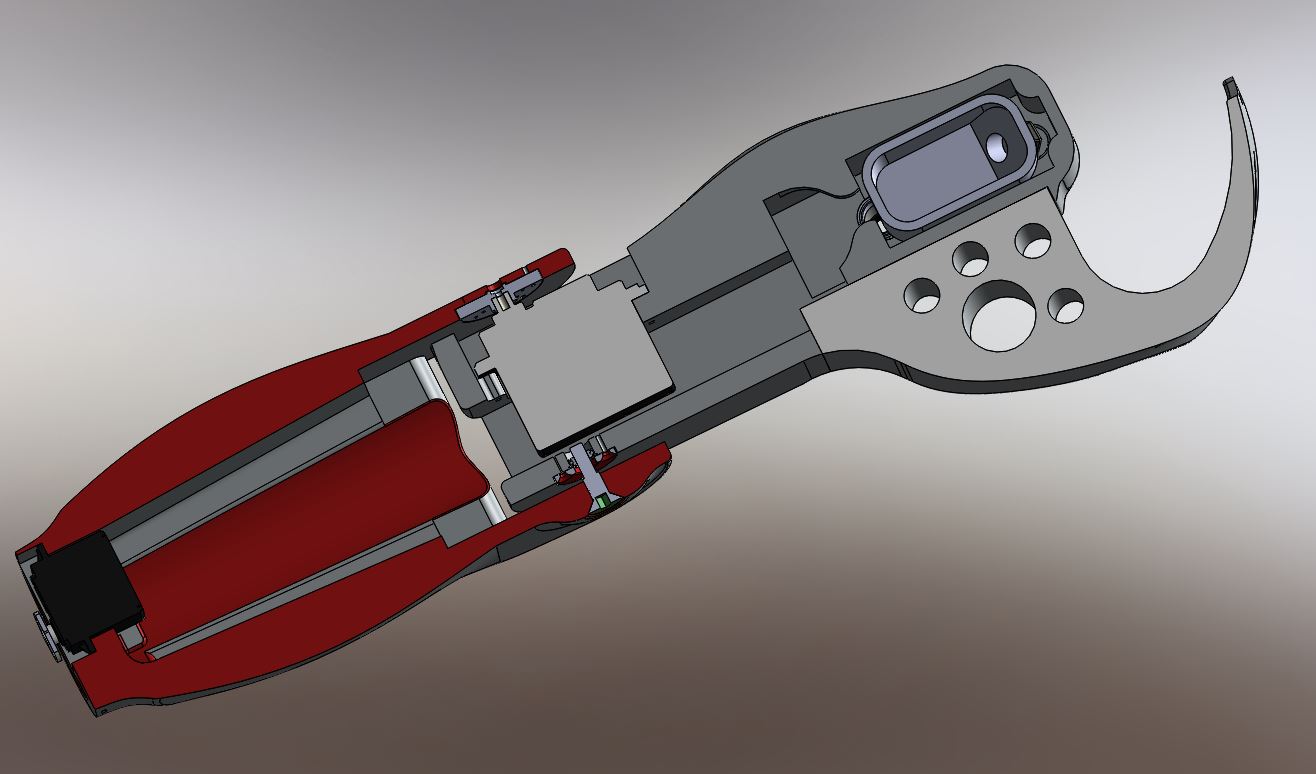
Robot Maya vue en coupe du bras , coude et de l’avant bras RedOhm
–
| Retour au sommaire |
20/02/2017 Etat de l’avancement de la rotation du poignet
|



–
| Retour au sommaire |
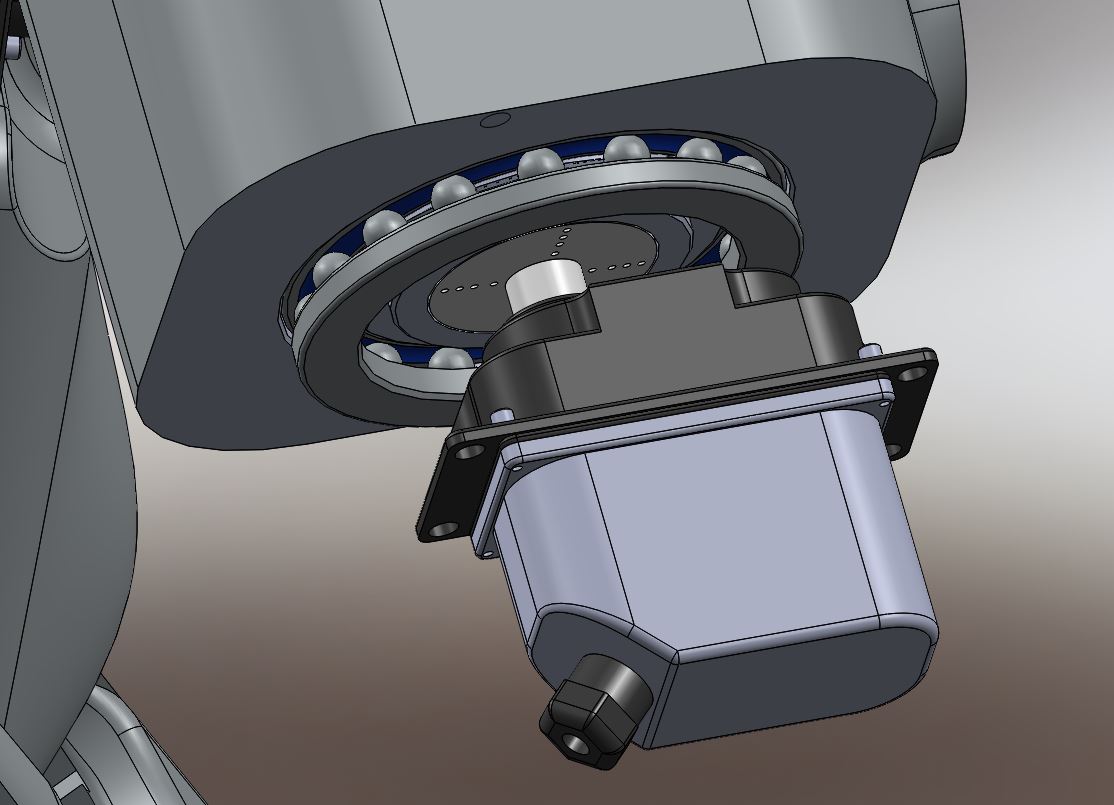
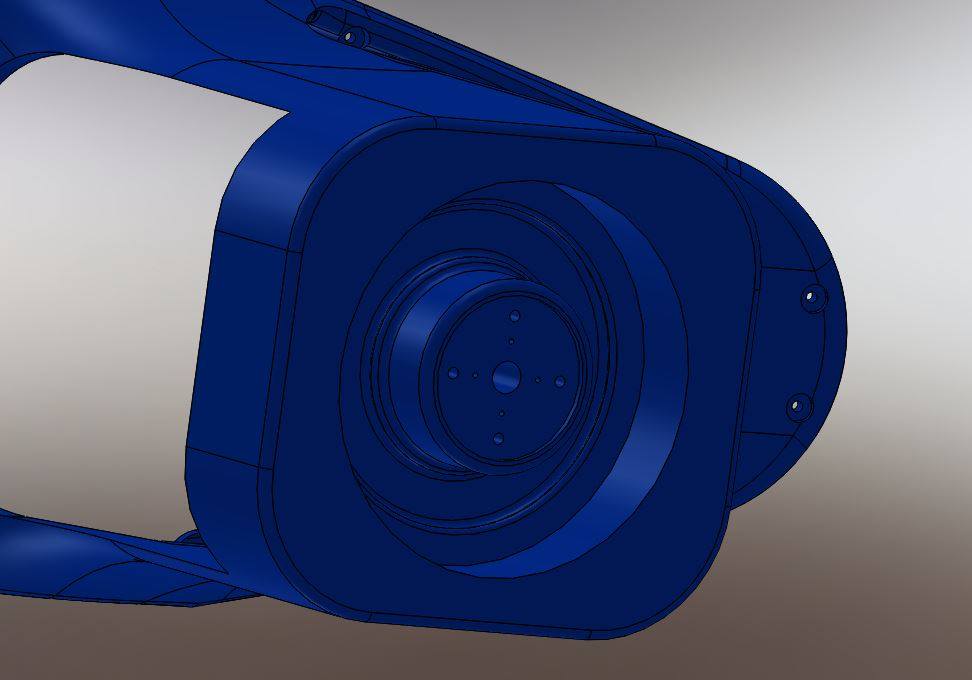
24/02/2017 Rotation du thorax et motorisation de celui-ci
|
Nous voici maintenant arrivé à la rotation du buste, nous pouvons remarquer sur les photos que nous avons repris le système de buté à bille déjà utilisée pour la rotation du cou. Le servomoteur 99 44 qui effectue cette rotation a été choisi pour ses qualités mécaniques. Nous pouvons remarquer au-dessus du système de rotation que l’on peut apercevoir une sorte de petit œil, nous avons à faire là ,à un Pico projecteur qui occupe une partie de la cage thoracique, évidemment cet accessoire est purement optionnel (c’est certainement un petit coup de nostalgie de R2-D2) .
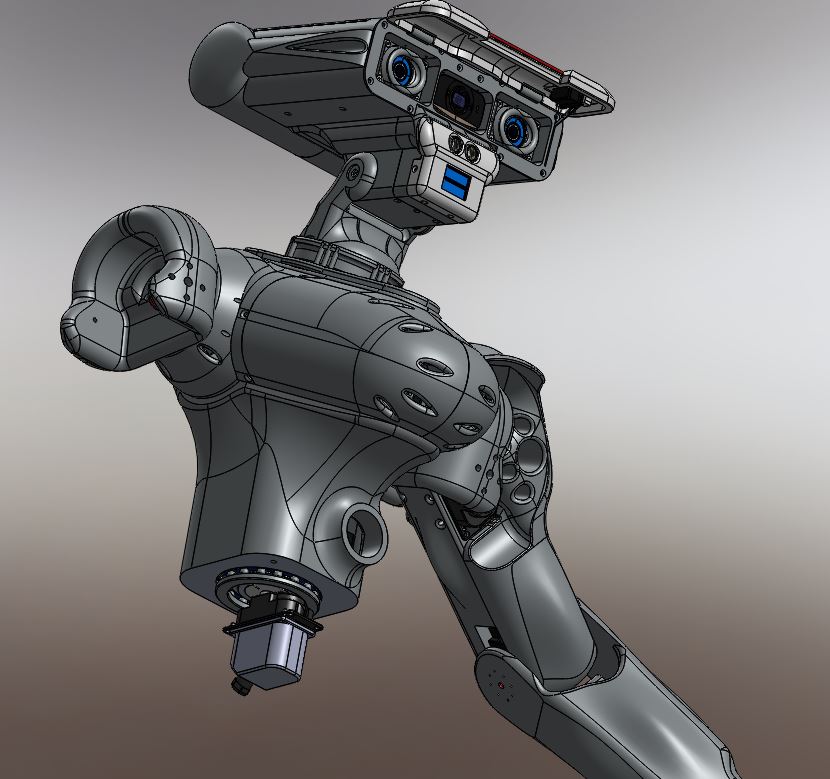
thorax de rotation Maya RedOhm – 001
thorax de rotation Maya RedOhm – 002
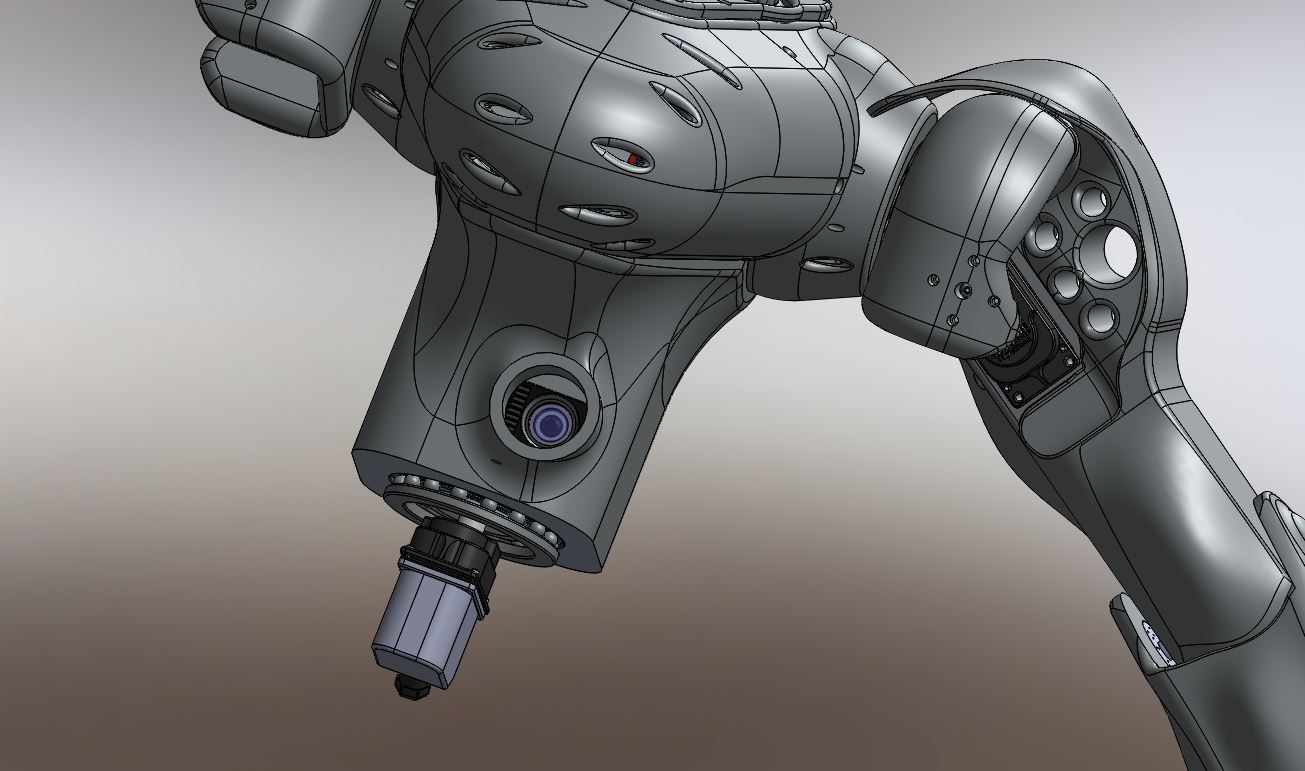
Maya rotation thorax visu sur le pico projecteur RedOhm – 003
Maya rotation thorax visu sur le pico projecteur RedOhm – 004
Information sur le fonctionnement des servomoteurs : Servomoteur
–
| Retour au sommaire |
![]()
25/02/2017 Schéma de principe du circuit de contrôle
|
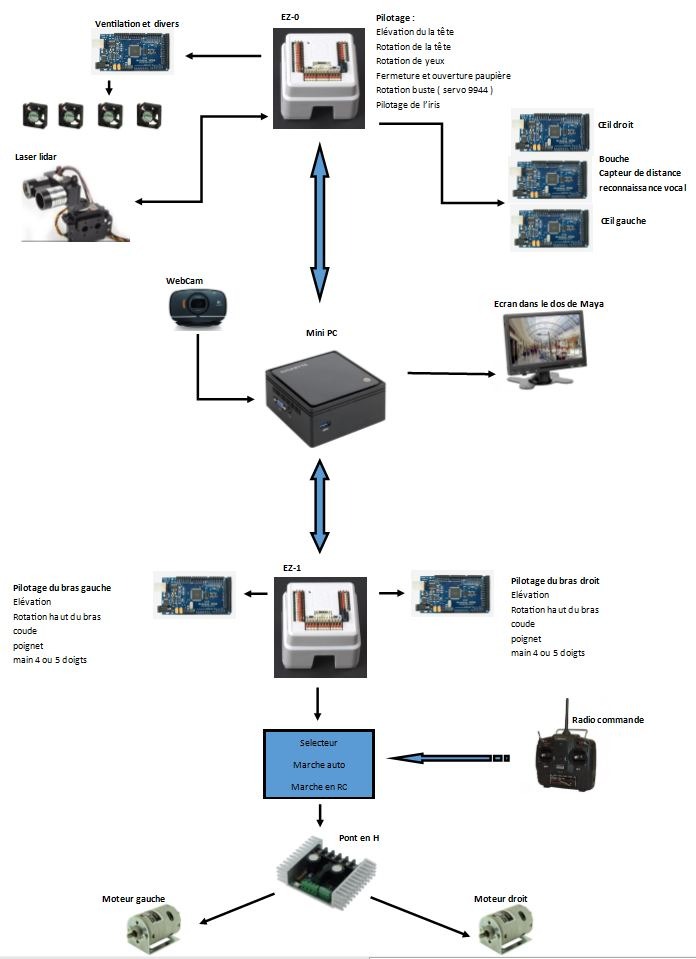
Maya schéma de principe du circuit de contrôle RedOhm
Voici d’une façon schématique comment va s’articuler le système de communication entre les diverses cartes utilisées. Un grand nombre de protocoles de communication sera utilisés dans ce système.
Exemple :
I2C : Communication entre les 3 cartes Arduino des yeux et de la bouche
SPI : Communication des afficheurs avec les carte Arduino 2560
WIFI ; Entre le mini pc et les cartes EZ-Robot
Filaire binaire : Entre les cartes EZ-Robot les cartes Arduino 2560
Rc : La radiocommande pour reprendre la main en cas anomalie
Vous remarquerez que sur ce dessin nous ne voyons pas apparaître tous les capteurs, vous aurez d’autres schémas correspondants à différents systèmes de détection que Maya utilisera. Nous développons actuellement un autre système pour remplacer le mini PC ceci afin de baisser le coût de construction , pour le moment nous avons jeté notre dévolu sur la carte LattePanda.
La carte de développement LattePanda est un ordinateur monocarte compatible Arduino. Elle fonctionne sous Windows 10 Home Edition 32 bits (avec la licence incluse) installé sur une mémoire flash de 32 GB intégrée. Le LattePanda fonctionne sur une base d’Intel ATOM X5-Z8300 comportant 2 GB de mémoire RAM.
Le LattePanda peut se connecter à un moniteur (via port HDMI ou MIPI-DSI) et propose une connectivité complète: WiFi, Bluetooth 4.0, 2 ports USB 2.0, port USB 3.0, port microSD (carte microSD non livrée), port audio Jack 3.5, connecteur RJ45 et 6 connecteurs pour capteurs compatibles Gravity. Le LattePanda peut effectuer les tâches simples d’un PC de bureau (feuilles de calcul, traitement de texte, décodage flux vidéos 1080p, internet, jeux peu gourmands en ressources…).
Nous avons déjà installé le logiciel EZ-Robot , et tester cette application sur la carte LattePanda pour le moment les résultats sont plutôt encourageants.
Notre fournisseur : Gotronic
Prix moyen de la carte : 155 €
–
| Retour au sommaire |
![]()
18/03/2017 Impression du haut du bras
|
Voici quelques photos du haut du bras de Maya. L’impression a duré 66 heures, pour 731 g de produit de chez ArianePlas . On peut déjà apercevoir un des deux servomoteurs montés dans la partie haute du bras.

Maya le 18-03-2017 par RedOhm




–
| Retour au sommaire |
![]()
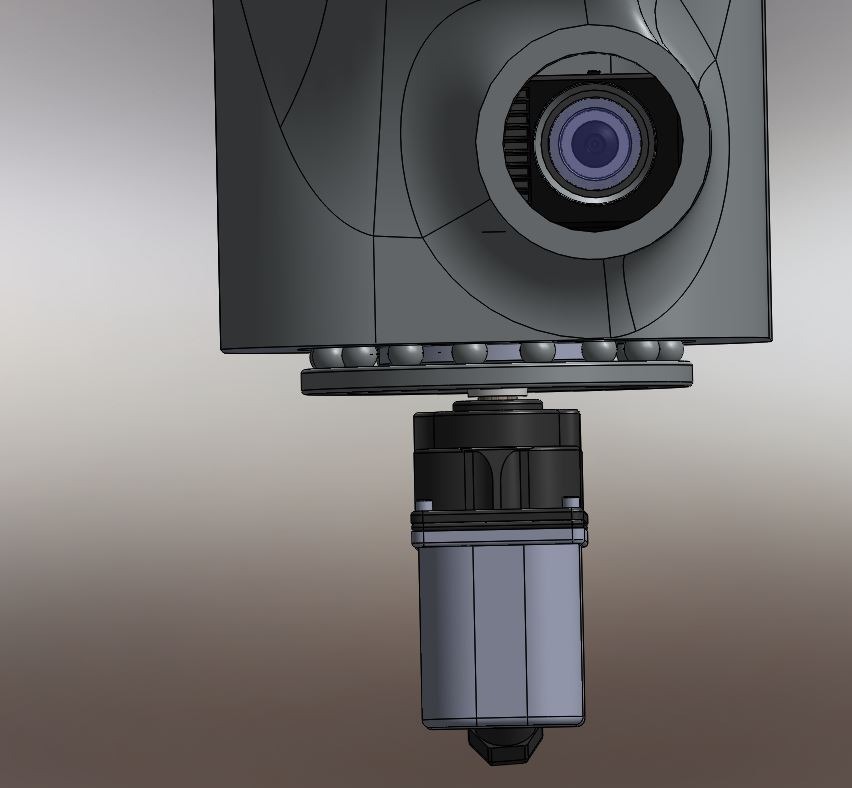
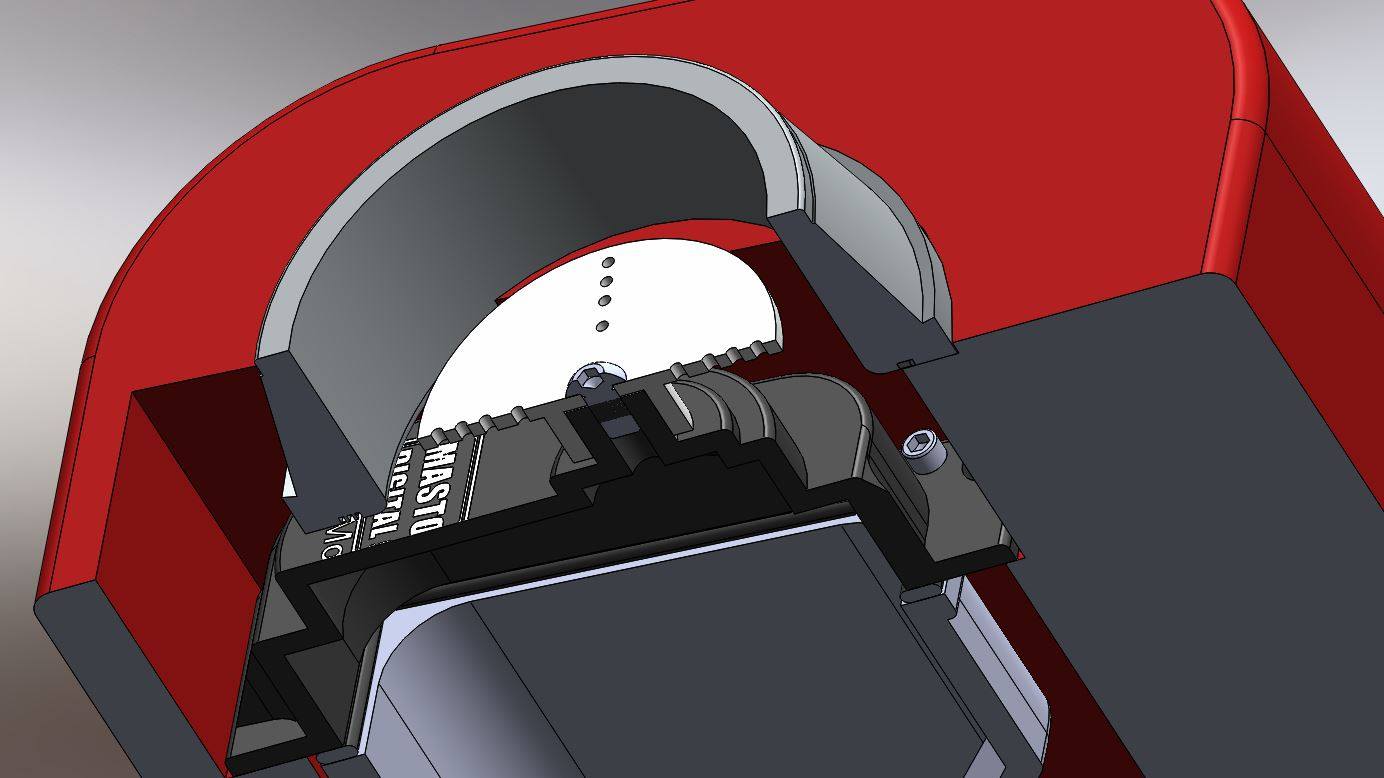
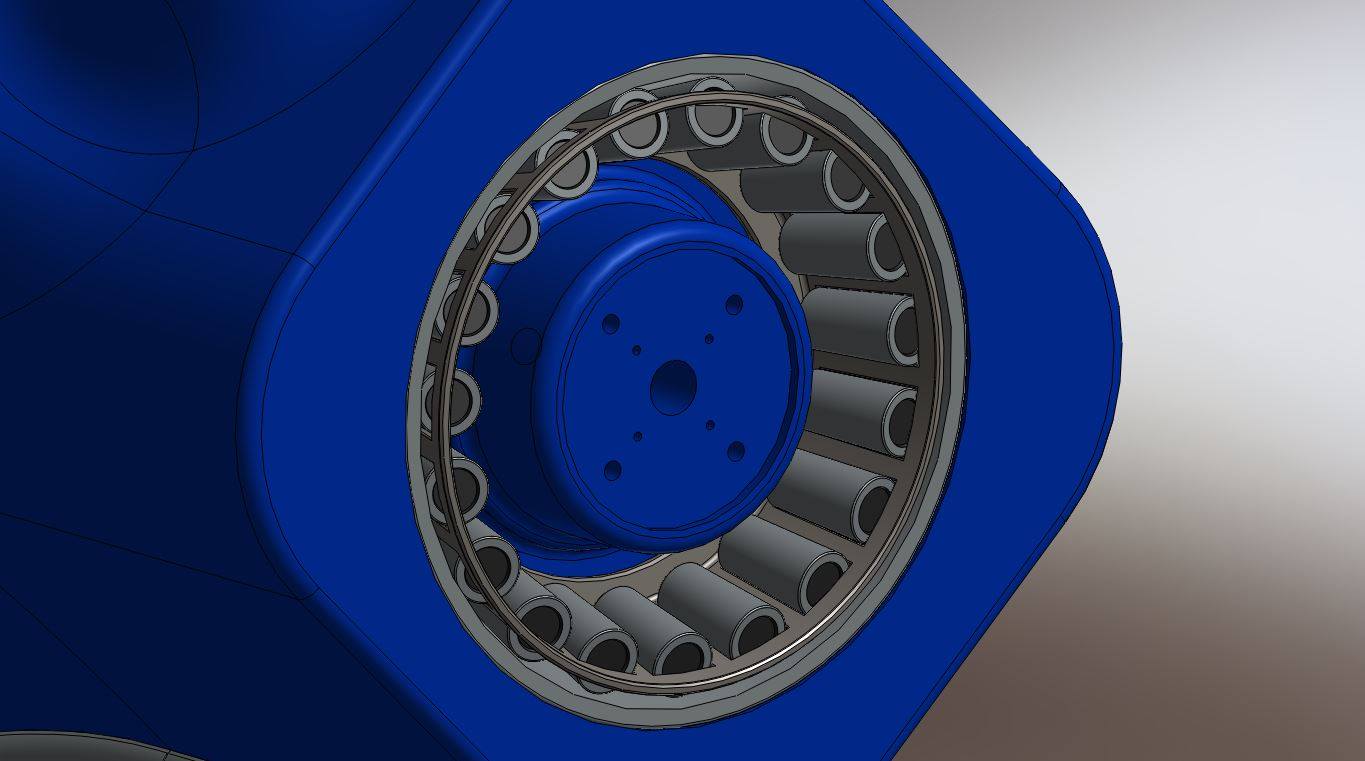
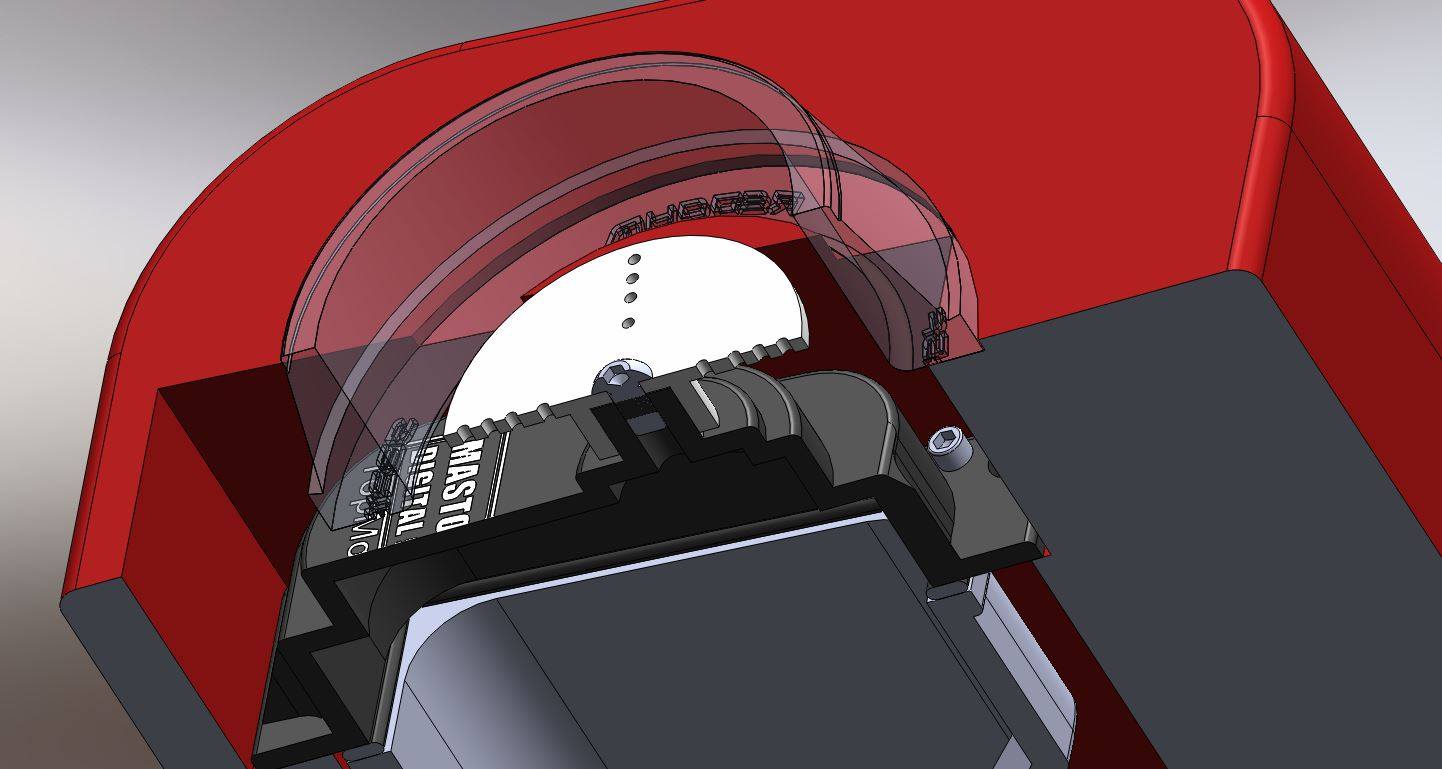
19/03/2017 Modification de la rotation du buste
|
Voici quelques photos qui vous donnent l’état des modifications pour la rotation du buste. Lors de la première étude, nous avions travaillé sur la rotation du buste par l’intermédiaire d’une buté à billes. Après présentation de l’étude à nos lecteurs, nous avons eu une remarque judicieuse (merci à notre lecteur) sur les efforts radial et axial de la rotation du buste (surtout avec le balancement des bras). Après quelques vérifications, nous avons donc inséré dans le buste un roulement à rouleaux coniques, ceci afin d’avoir une meilleure stabilité de l’ensemble et d’absorber les différents efforts.
–
| Retour au sommaire |
08/04/2017 Essai du bras de Maya.
|
–
Nous allons déjà faire le point sur les actionneurs nécessaires à la construction du bras.
Nous avons pour la rotation et l’élévation du haut du bras .2 servomoteurs Mastodon 9944 de chez Topmodel (Couple: 99 kg.cm).
Pour la partie du coude, nous utilisons un servomoteur Hitec HS805BB. Ce servomoteur à roulement à billes se caractérise par un couple très élevé (Couple: 24 kg.cm).
Pour la partie rotation du poignet, nous avons un servomoteur Hitec HS645MG .Ce servomoteur à double roulements à billes se caractérise par un excellent centrage et un couple très élevé pour sa taille (Couple: 9,6 kg.cm).
Nous avons choisi pour piloter cet ensemble un module Ez robot. Le module EZ-Robot contient les composants nécessaires pour réaliser rapidement cette manipulation pilotée par PC via une liaison sans fil Wifi .L’utilisation du logiciel EZ-Builder sur votre ordinateur vous permet de contrôler les sorties de la carte de commande EZ-B V4.
Passons à la tension d’alimentation, pour faire ces essais , nous aurons besoin de 7.4V pour la partie puissance des servomoteurs Mastodon 9944. Une tension de 6 V pour le servomoteur du coude et de la rotation du poignet. Pour l’alimentation du module de contrôle , nous aurons besoin d’une tension de 12 V.
Vous remarquerez que nous avons choisi d’utiliser les tensions maximales sur les servomoteurs pourquoi ? Simplement pour avoir le couple maximum donné par le constructeur.
Informations utiles sur les servomoteurs sur -> Les servomoteurs
–
| Retour au sommaire |
![]()
22/04/2017
|
–
Voici une présentation du fonctionnement manuel des différents mouvements de la tête. Nous avons déjà la rotation des yeux comme un être humain, nous bougeons d’abord nos yeux avant de bouger la tête, et enfin seulement quand nos yeux sont en buté ou je dirais plutôt au maximum de leurs déplacements, la tête tourne pour continuer à observer. Il en sera de même pour notre robot. De même, vous pourrez voir dans cette vidéo le système d’élévation de la tête. L’ensemble du déplacement des yeux, de la rotation de la tête et de l’élévation de la tête et piloté par la caméra qui se trouve au centre de la boîte crânienne de Maya. Évidemment, cette caméra passe par un ordinateur qui après traitement, renvoie ces informations de déplacement sur les servomoteurs qui pilotent ses ensembles. Vous pourrez remarquer aussi que les yeux de Maya sont opérationnels, ils sont surtout là pour vous donner l’état d’esprit de notre robot (et voilà, je considère qu’il est vivant cela ne vous rappelle rien) sur la vidéo, le robot possède des yeux qui reflètent qu’il est attentif, vous pourrez observer plus tard qu’il possède une multitude de formes d’œil, qui démarre de la colère, attentif, penaud, choqué etc.
| Retour au sommaire |
![]()
29/04/2017
|
Nous avons intégré dans la boîte crânienne de Maya une enceinte Bluetooth qui permettra de restituer la parole de notre robot, mais bien évidemment, vous aurez aussi la possibilité de mettre des haut-parleurs filaires. Comme nous l’avions annoncé dès le départ, notre robot est sous le signe de la culture Maya , donc nous avons réalisé la grille du haut-parleur avec une reproduction stylisée du calendrier maya. Vous remarquerez aussi que nous avons dû percer avec un trépan la boîte crânienne de notre robot là encore, de nouveaux fichiers seront disponibles, pour éviter cette manipulation. En revanche, ceux qui ont déjà sorti la boîte crânienne, la grille du haut-parleur s’adapte parfaitement. Le trépan utilisé pour percer la boîte crânienne de Maya est de diamètre 54. C’est un trépan que l’on trouve facilement dans n’importe quel magasin de bricolage.
Calendrier Maya

Nous avons réalisé la grille du haut-parleur avec une reproduction stylisée du calendrier maya – RedOhm

Le trépan utilisé pour percer la boîte crânienne de Maya est de diamètre 54. – RedOhm

L’ensemble sur Maya -RedOhm
| Retour au sommaire |
![]()
06/05/2017
|
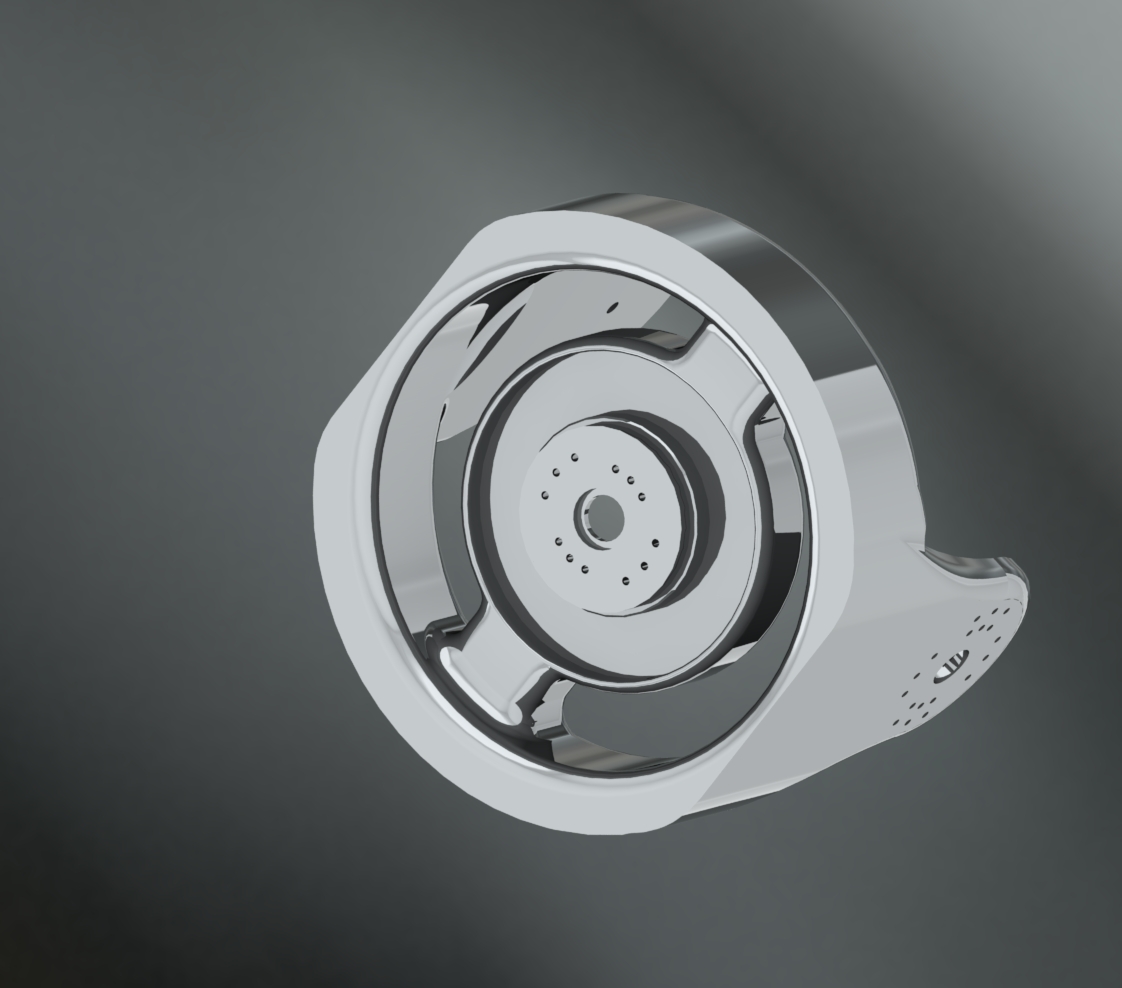
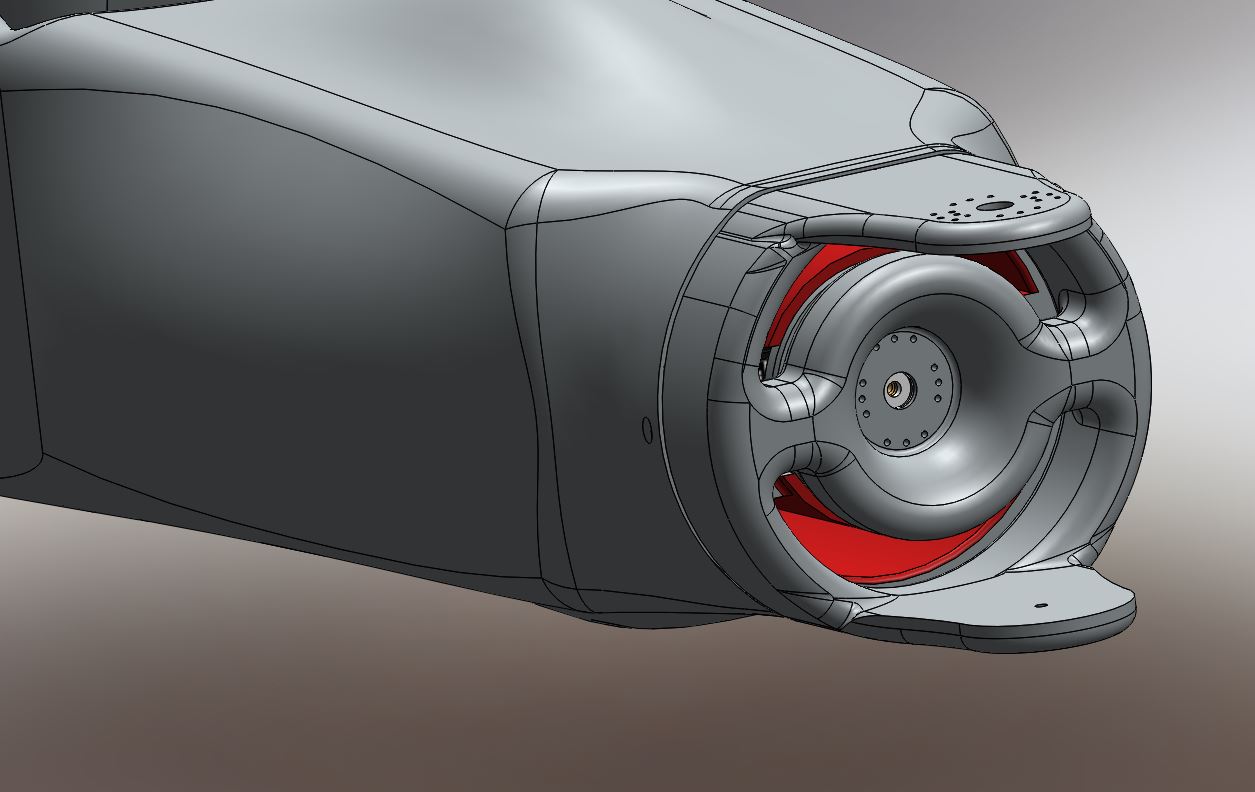
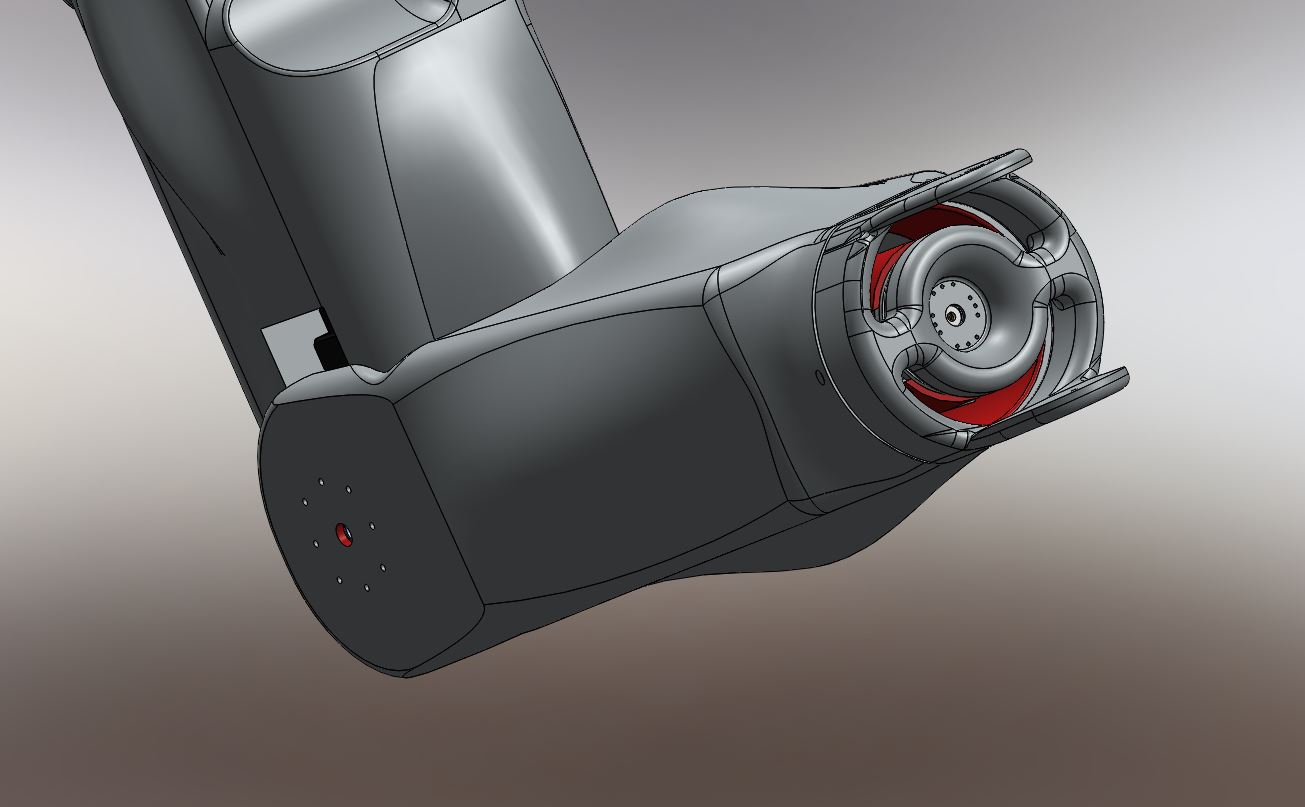
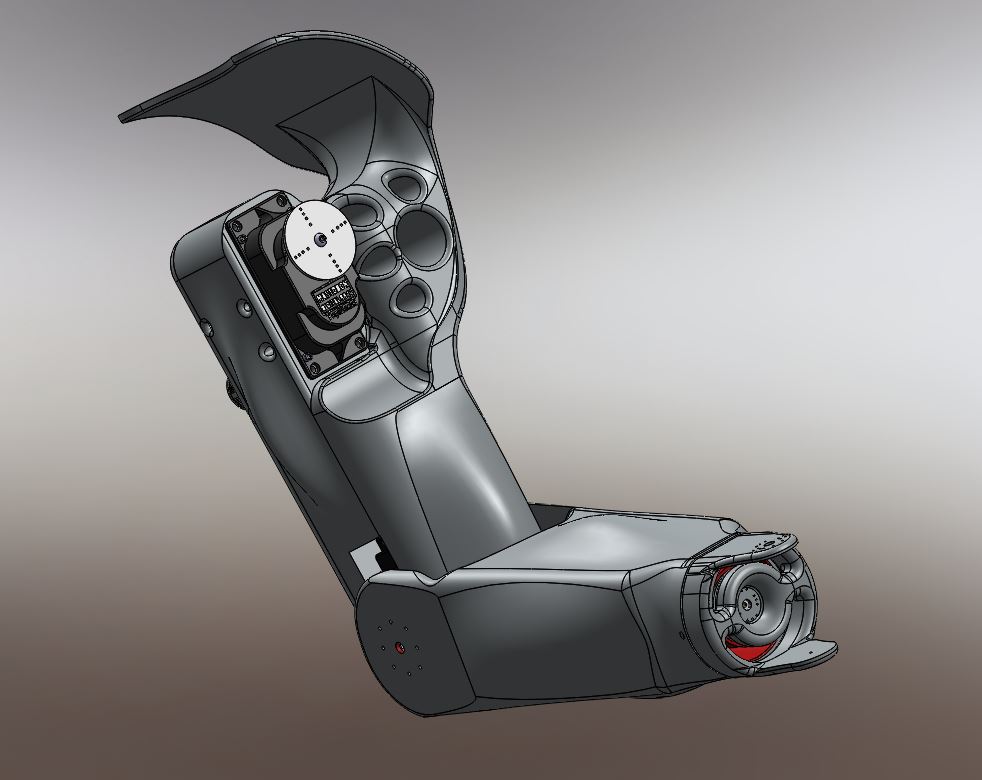
Pour le déplacement de Maya nous avons réfléchi sur trois types de châssis différents, nous allons commencer par le châssis qui est prévu plutôt pour rouler en plein air. L’ensemble est relativement facile à construire « Eh oui il va falloir faire un peu de mécanique », le montage est composé d’un moto réducteurs compact Doga 319 *12V/95rpm (mais rien ne vous empêche de récupérer 2 moteurs d’essuie-glace de même type), de 2 paliers à semelle avec graisseur UCP 202, une tôle en aluminium de 6 mm d’épaisseur, et enfin de construire l’axe principal est l’élargissement de roue qui sera adaptée au type de roue que vous pourrez récupérer. Vous aurez toutes les informations techniques, les dessins, les branchements électriques avec le variateur sur notre site.
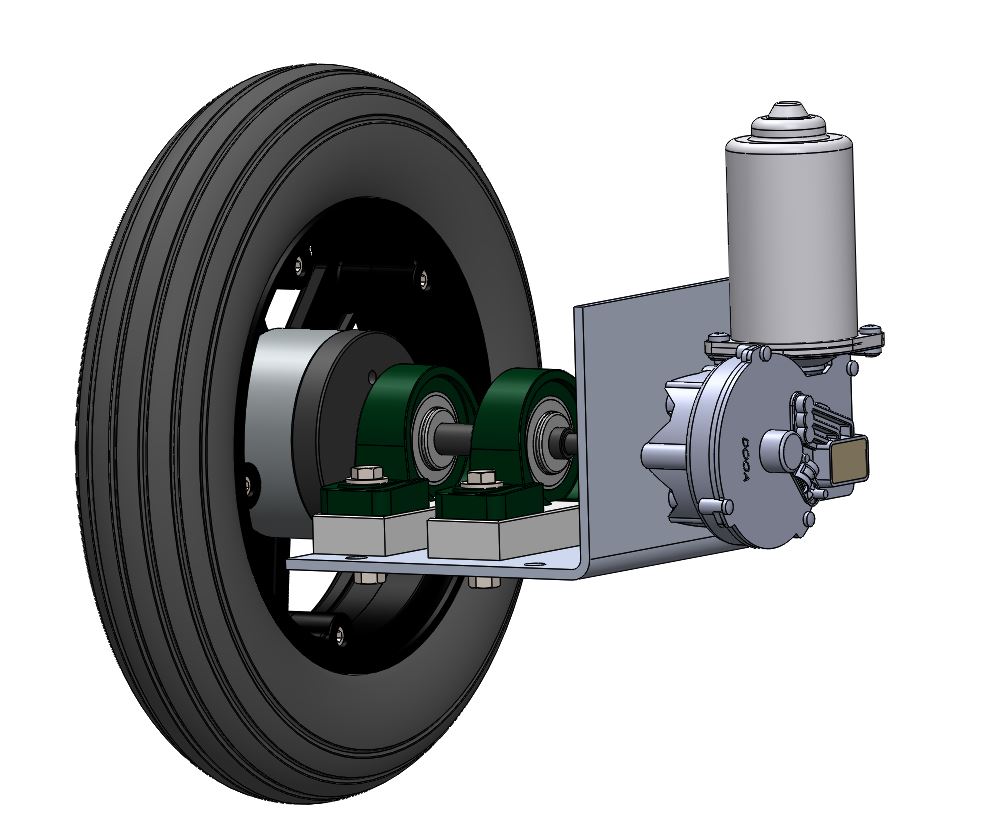
Maya groupe moto-propulseur vue sur le moto-réducteur RedOhm
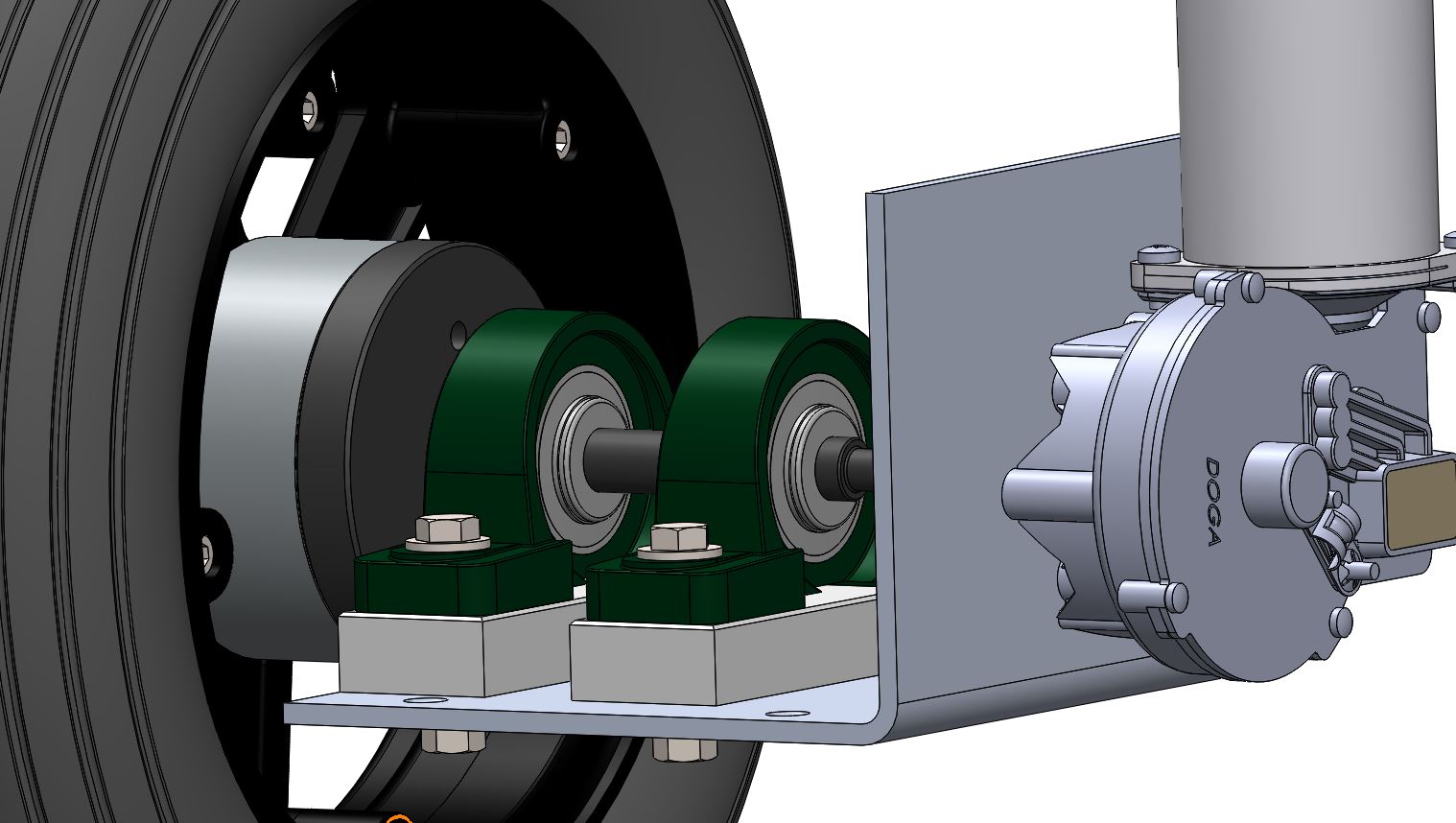
Maya groupe moto-propulseur vue sur le moto-réducteur RedOhm – 001
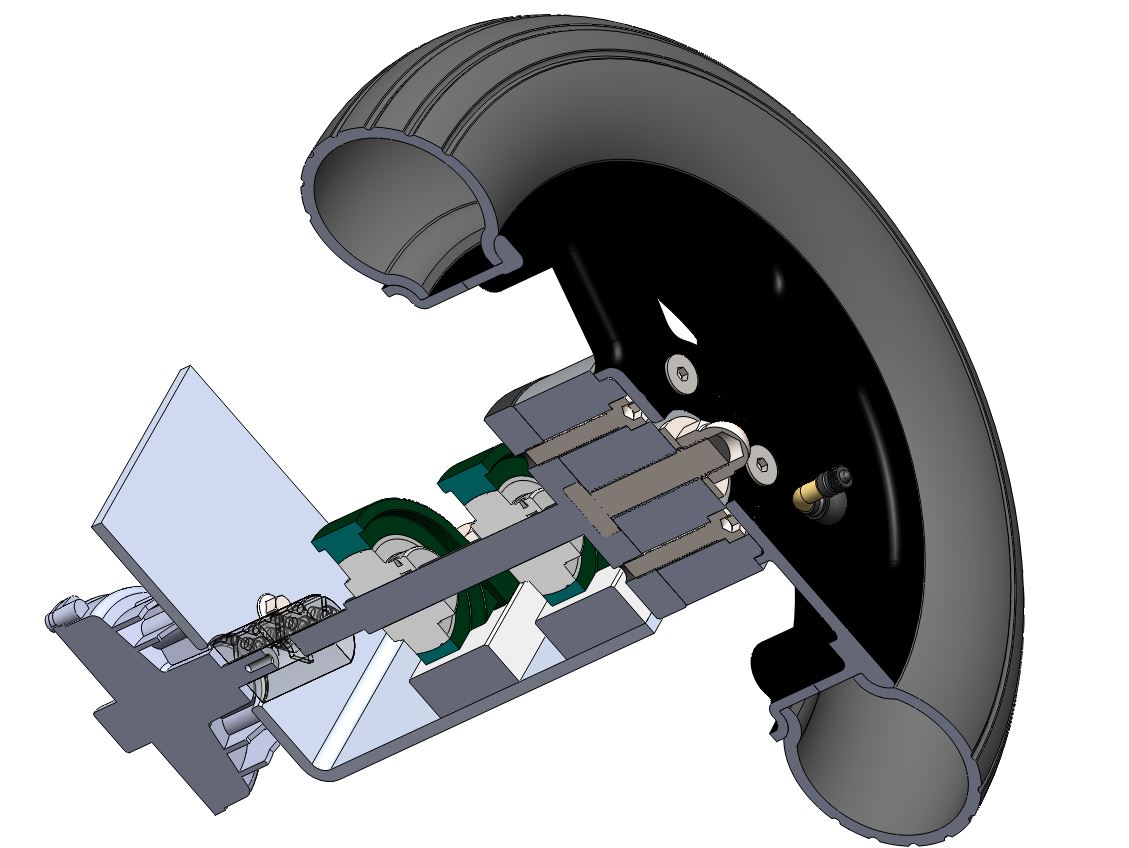
Maya groupe moto-propulseur vue sur le moto-réducteur RedOhm – 002
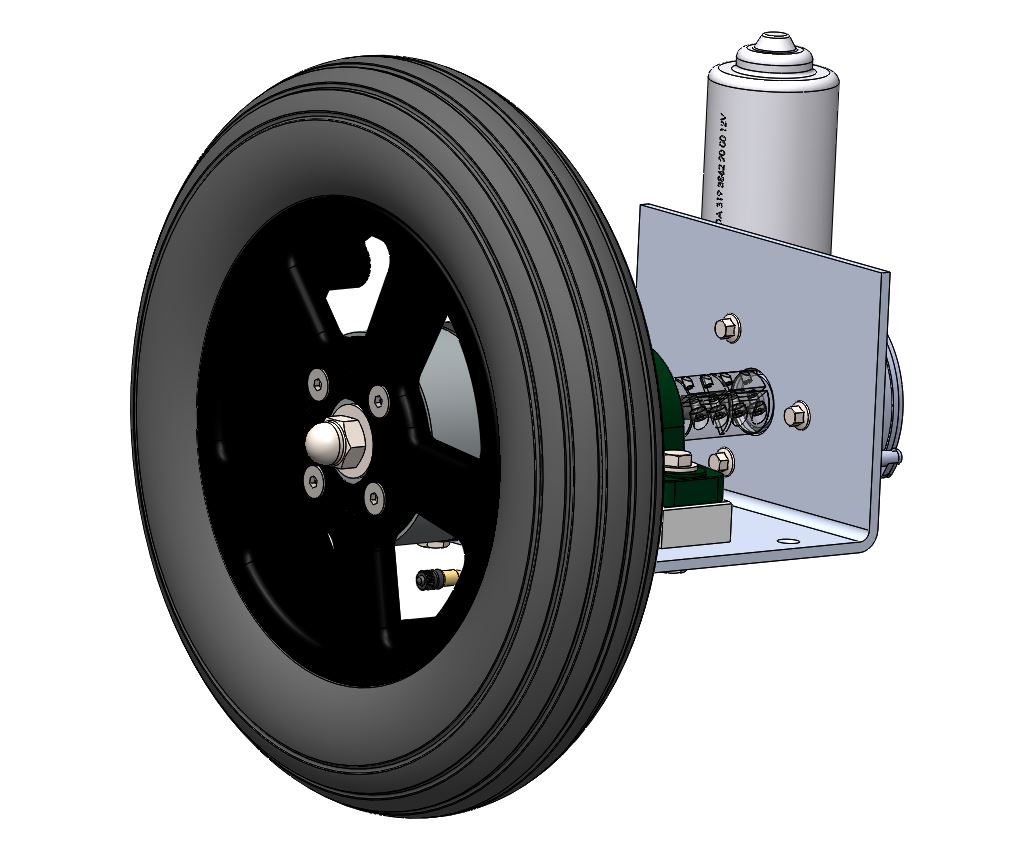
Maya groupe moto-propulseur vue sur le moto-réducteur RedOhm – 003
Information technique :
Groupe moto-réducteur : Doga 319 la page ou le site Mdp
Palier à semelle avec graisseur UCP 202 : 1001roulements la page ou 1001roulements le site
| Retour au sommaire |
![]()
11/06/2017
|
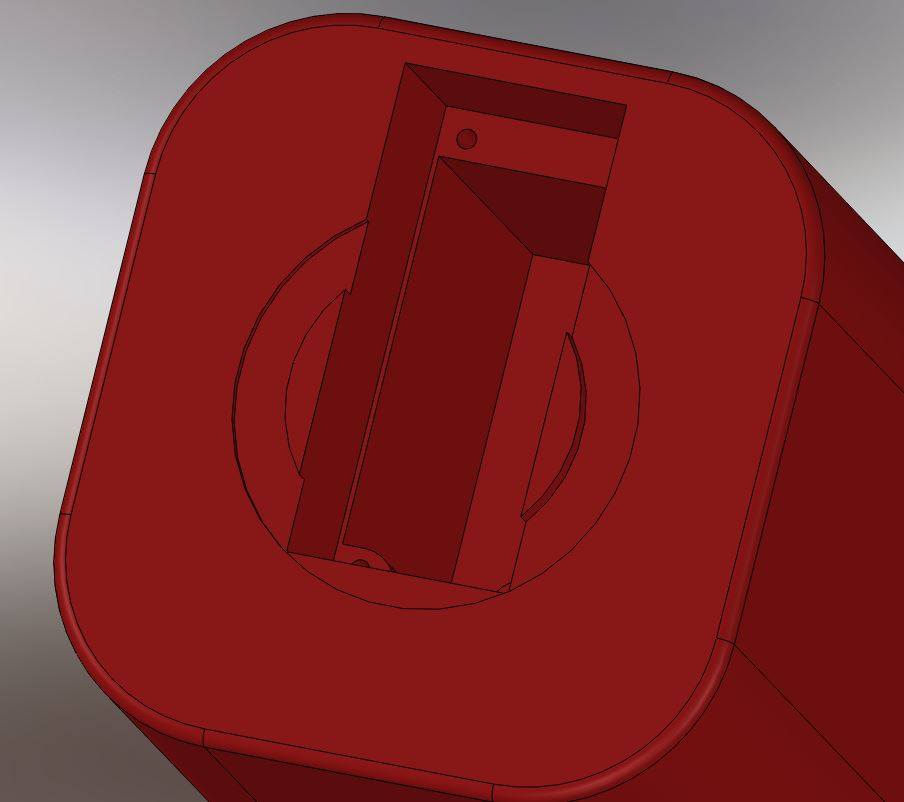
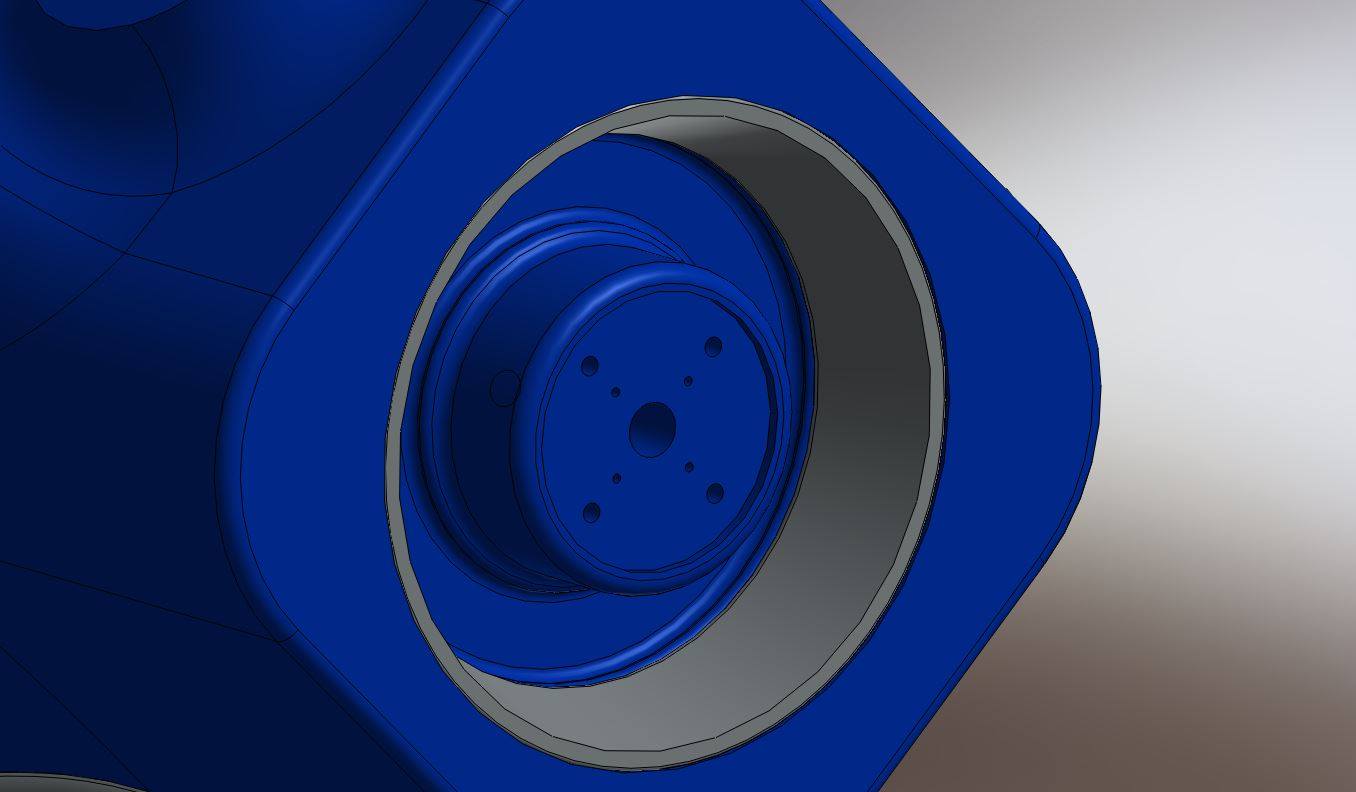
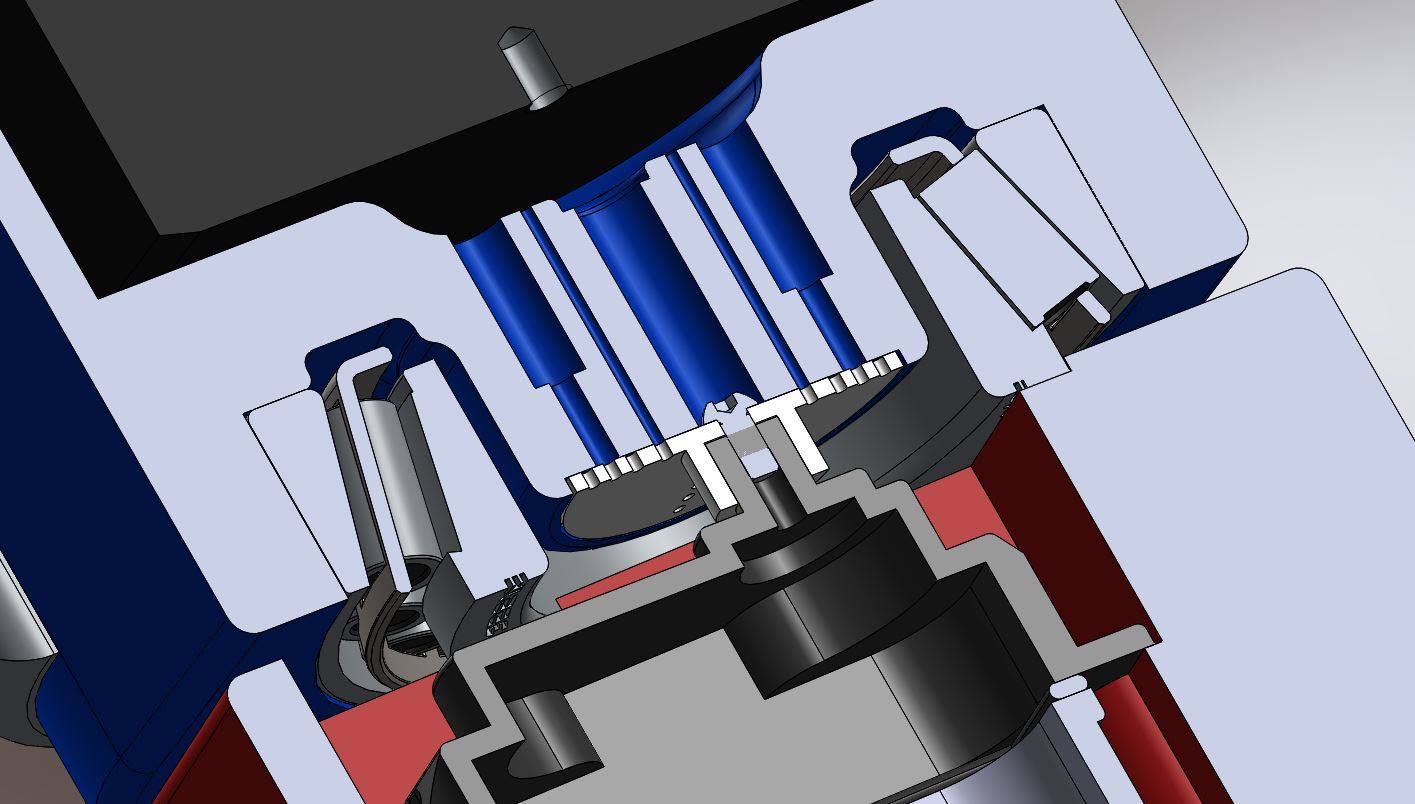
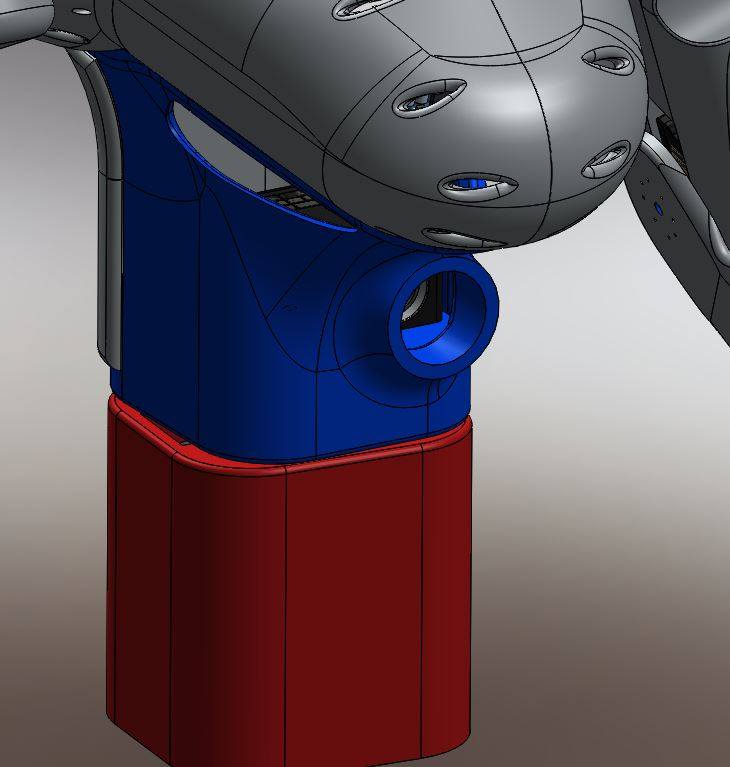
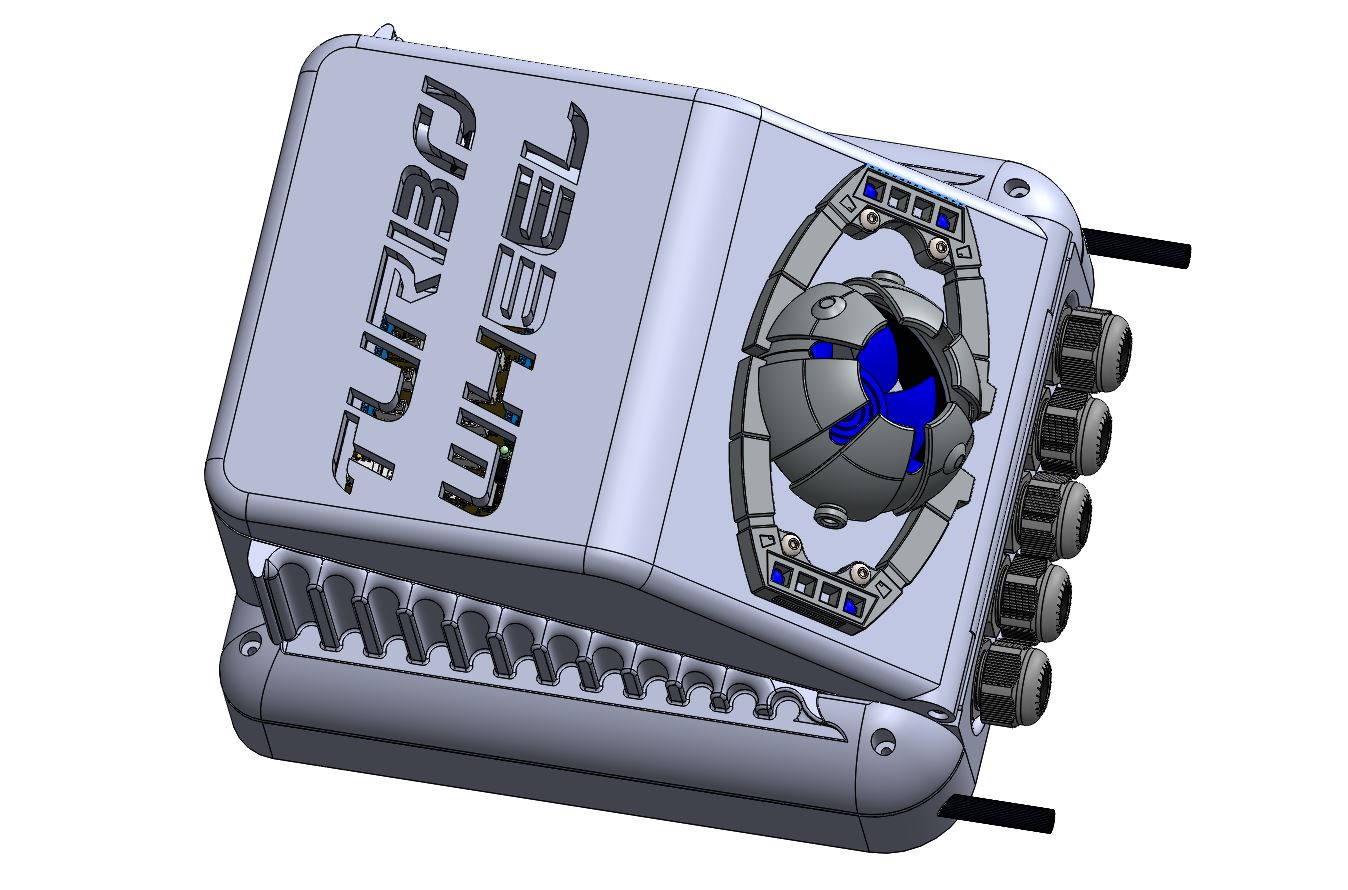
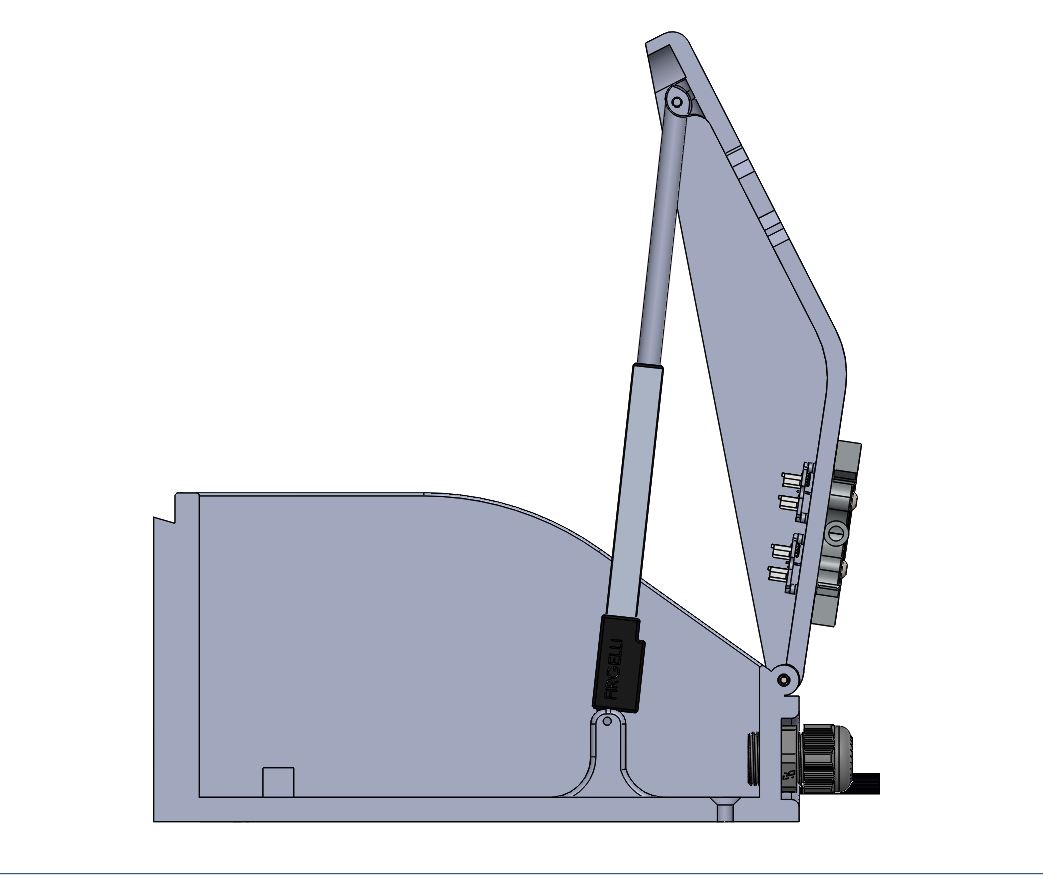
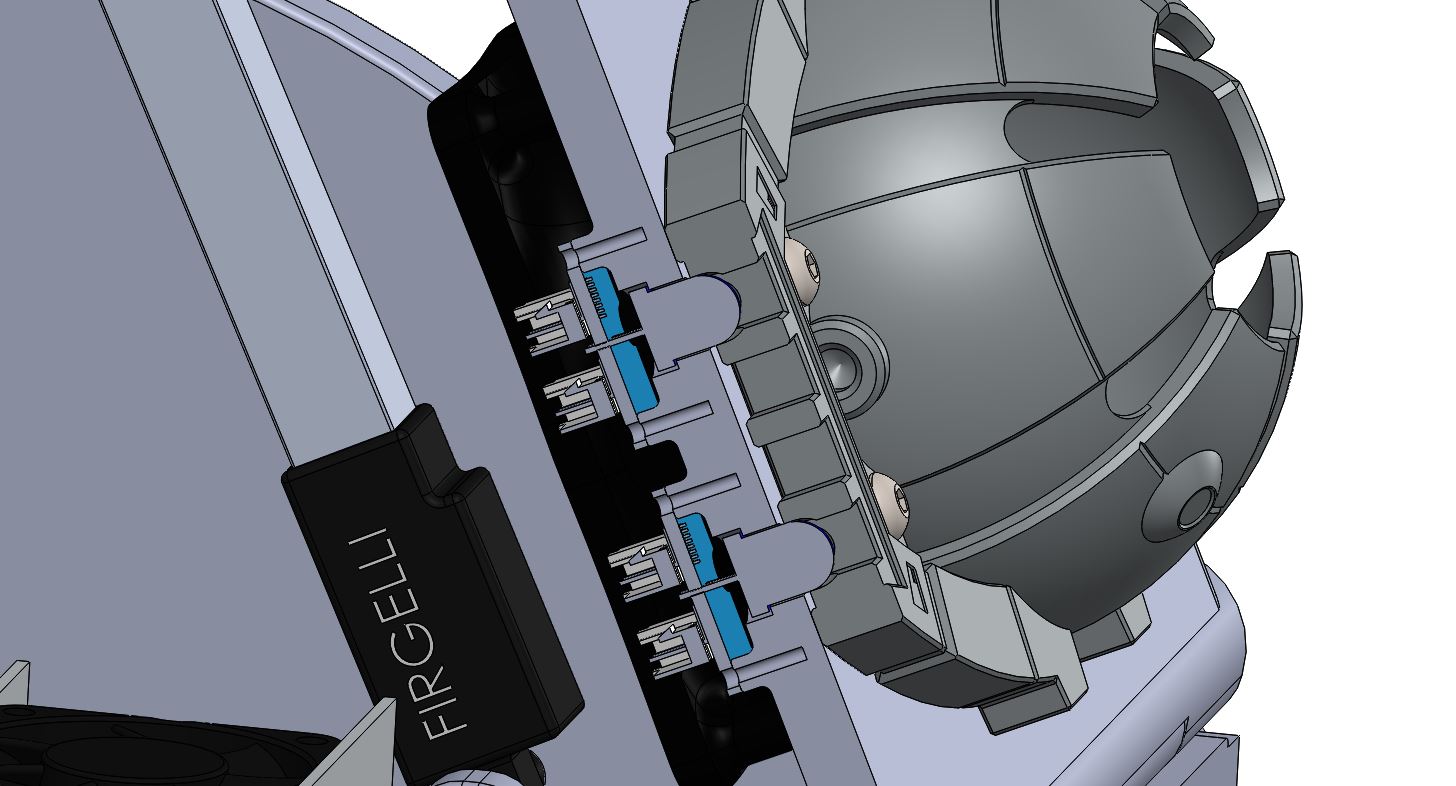
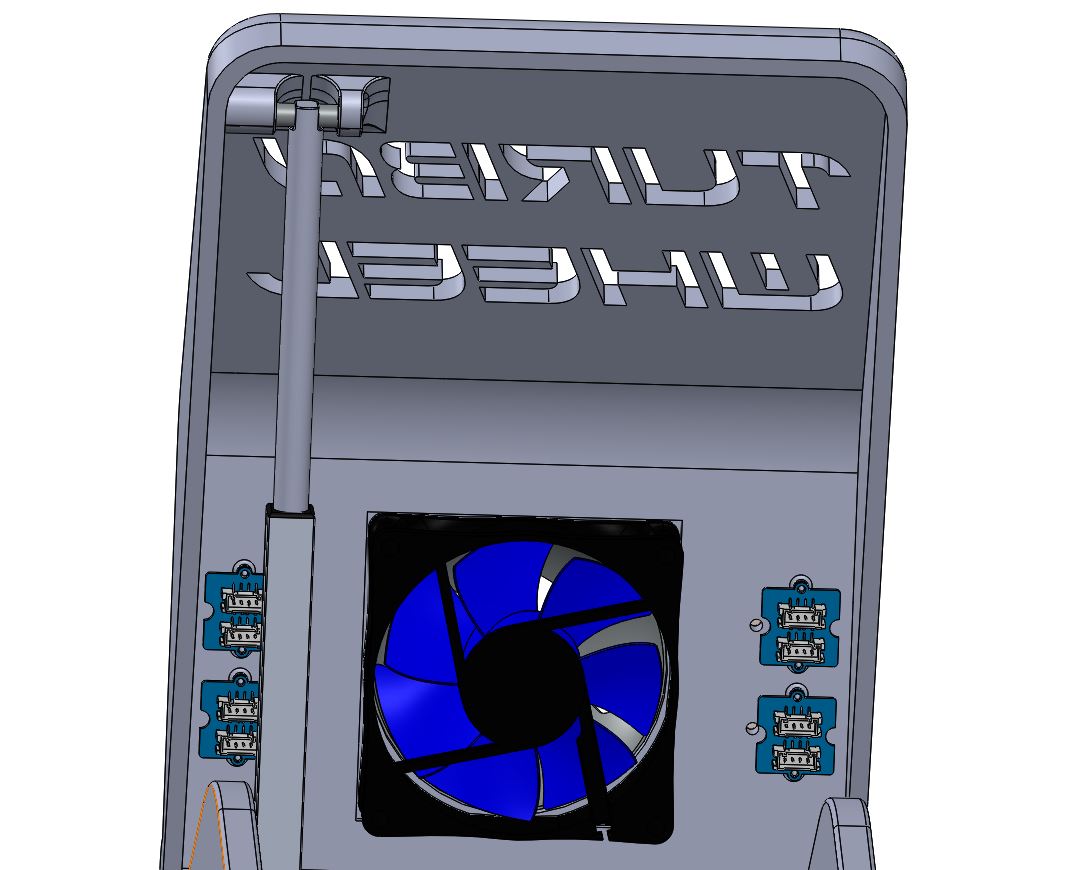
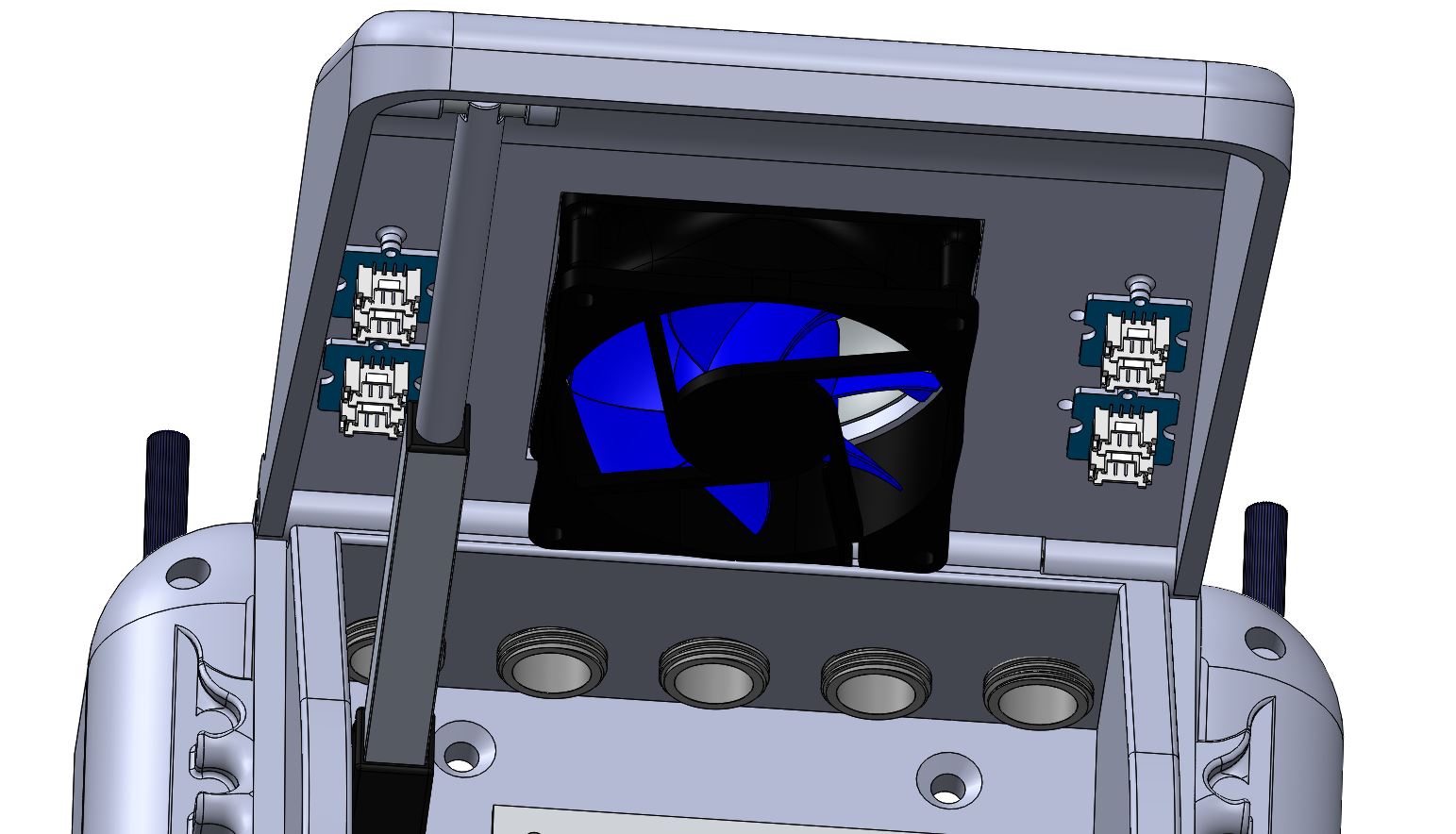
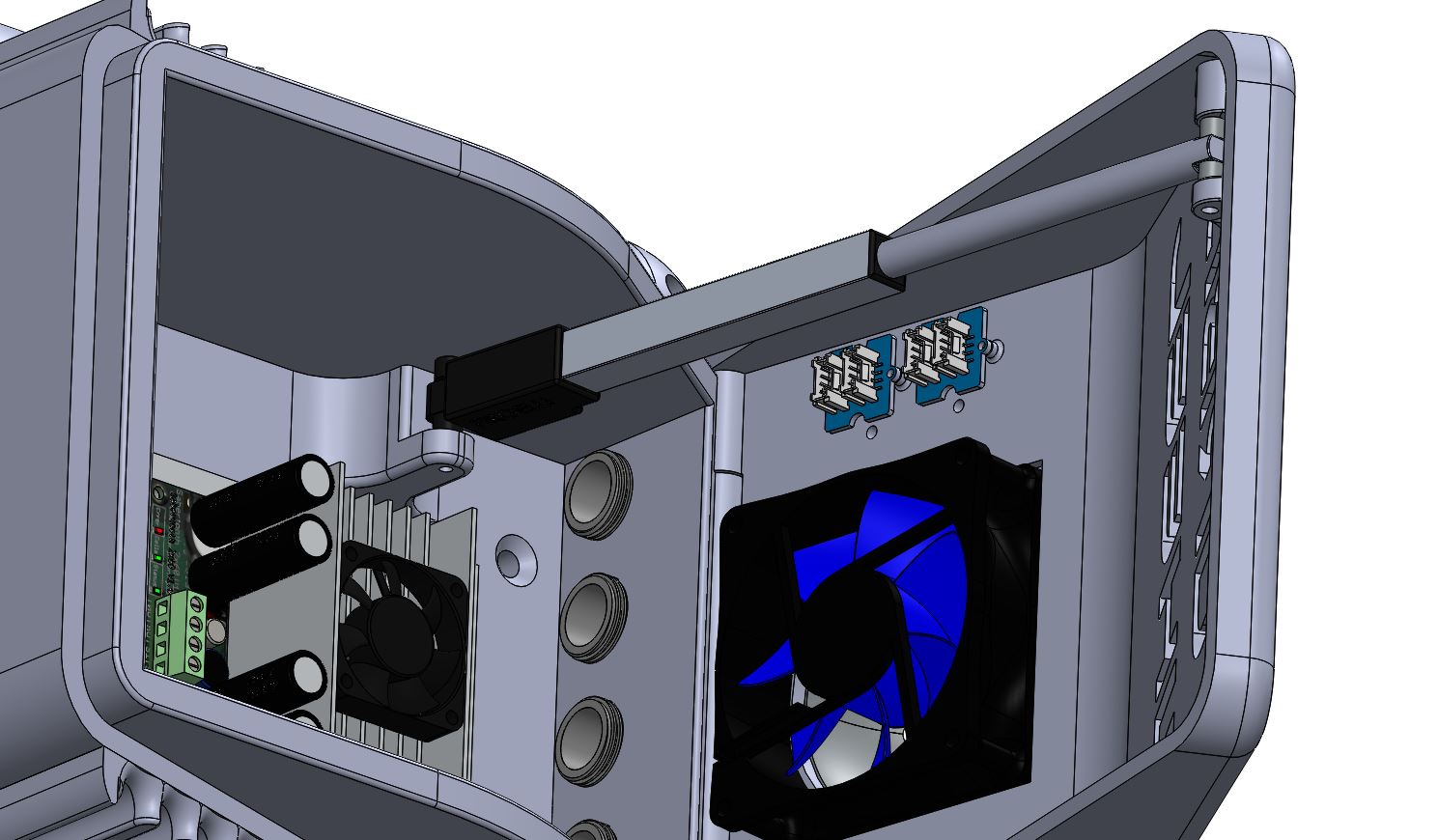
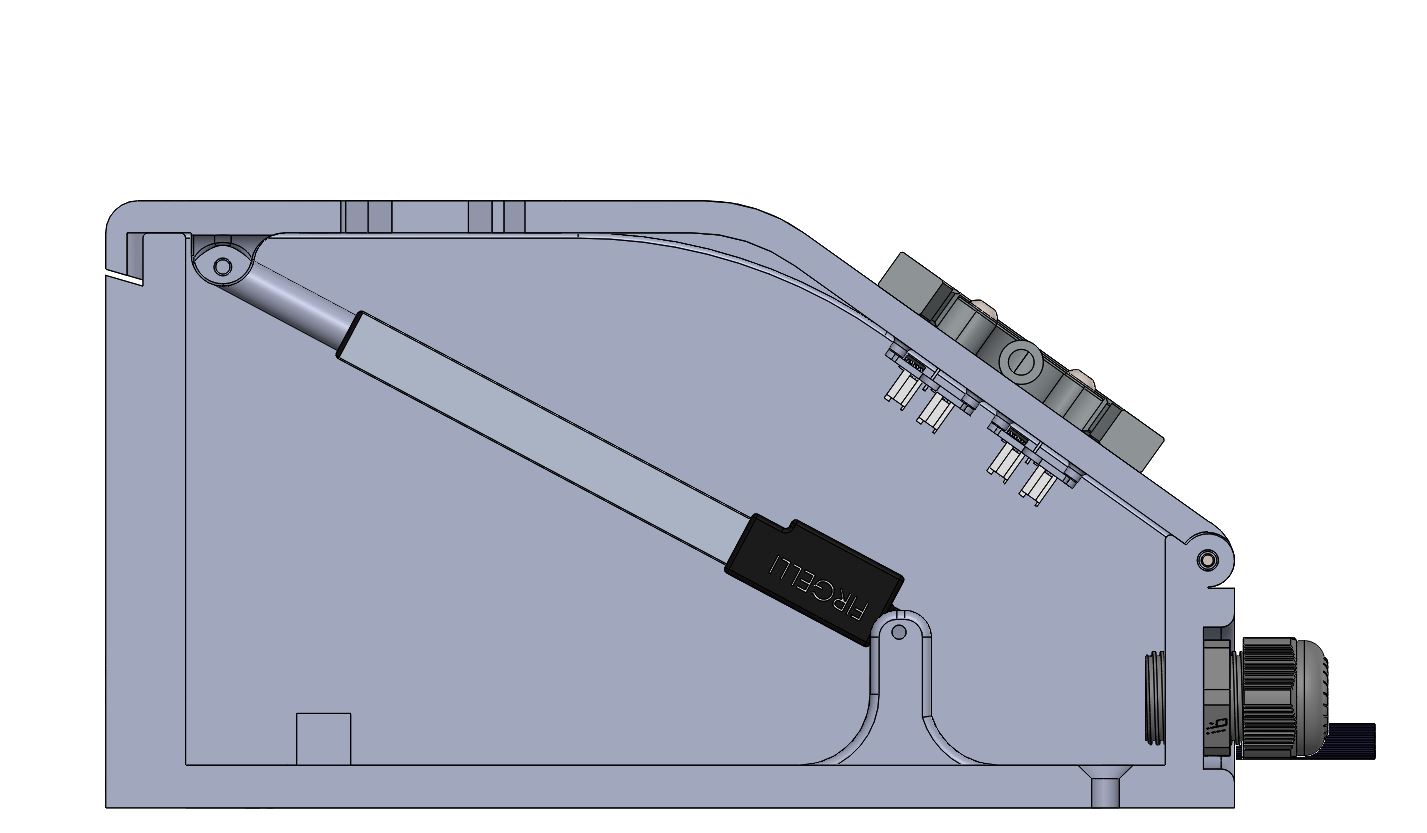
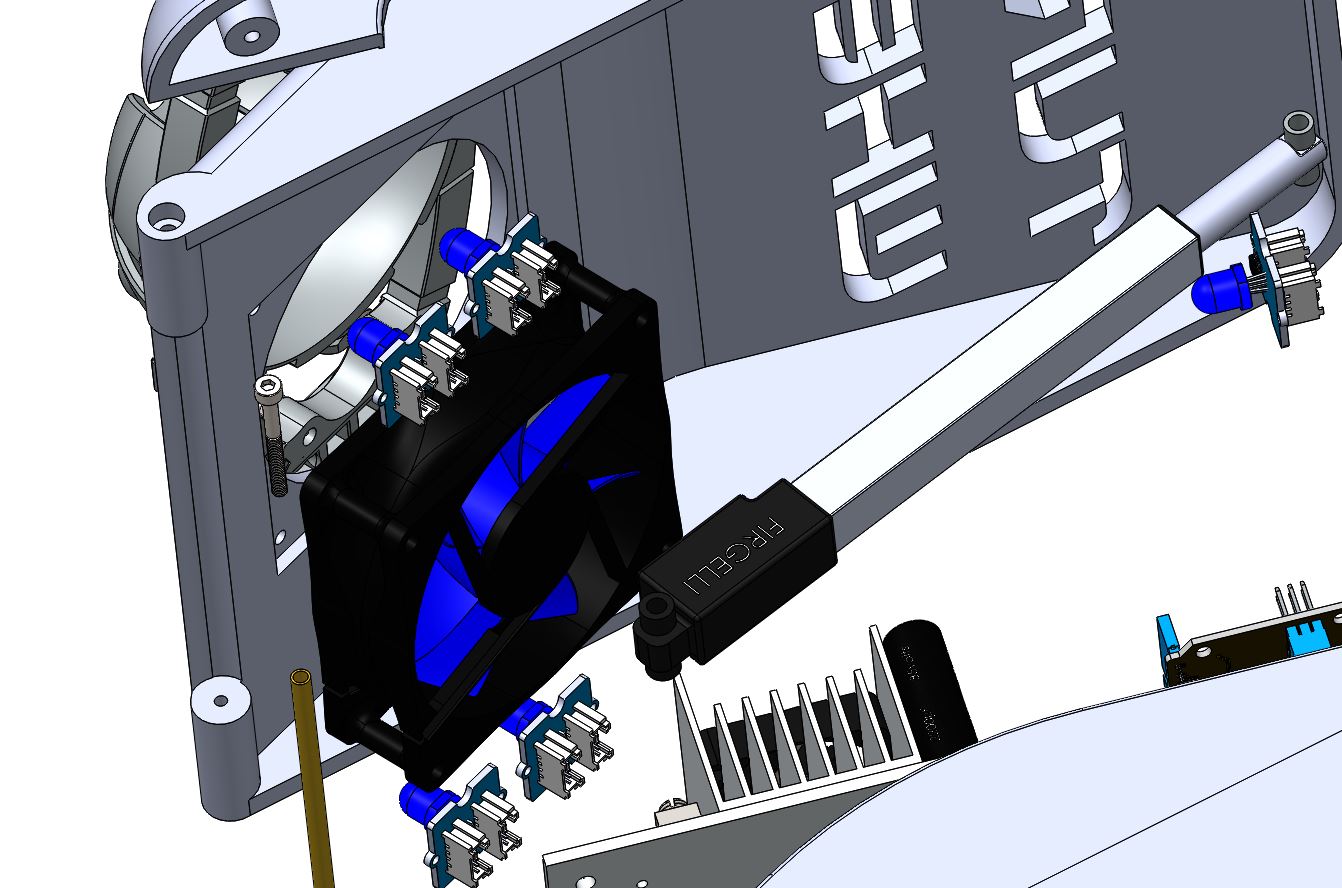
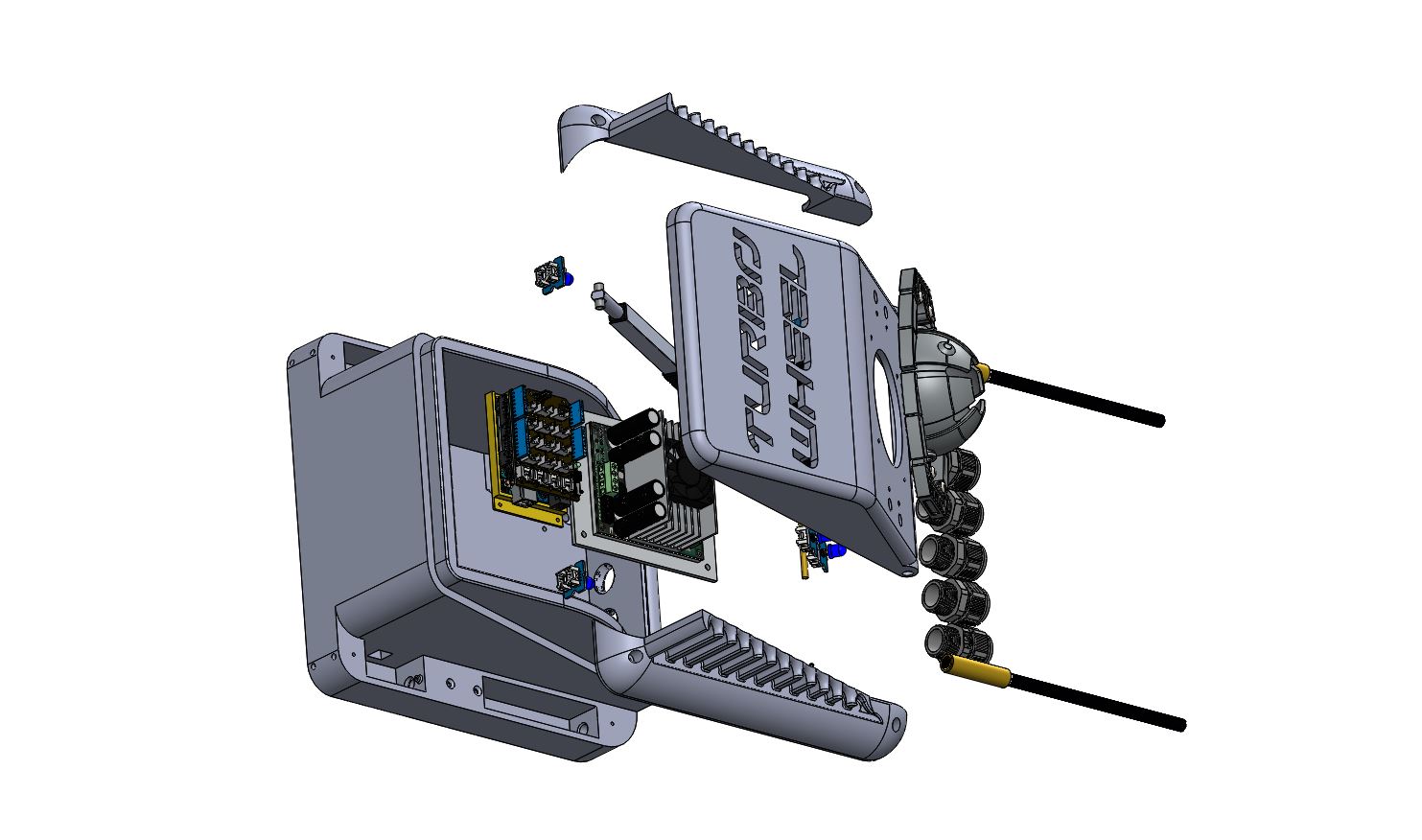
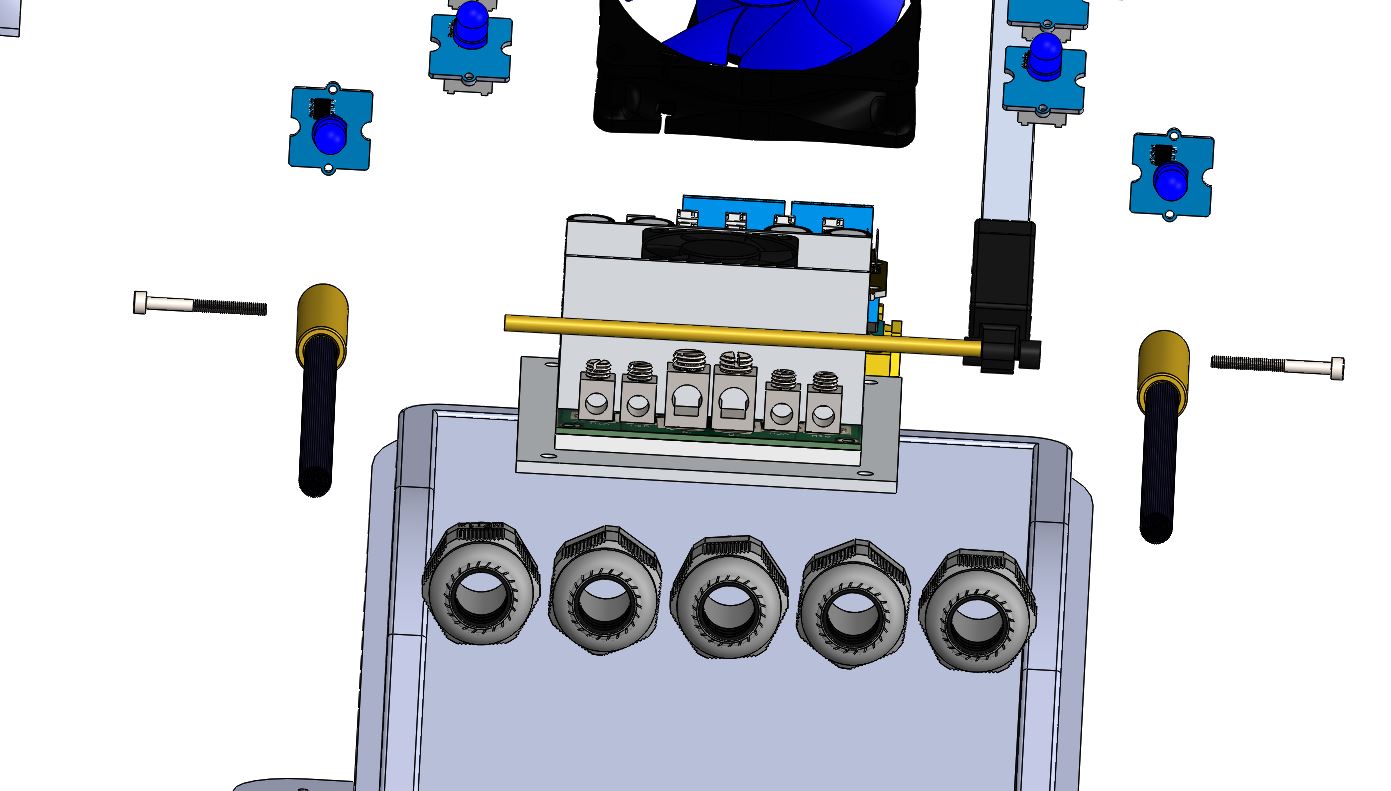
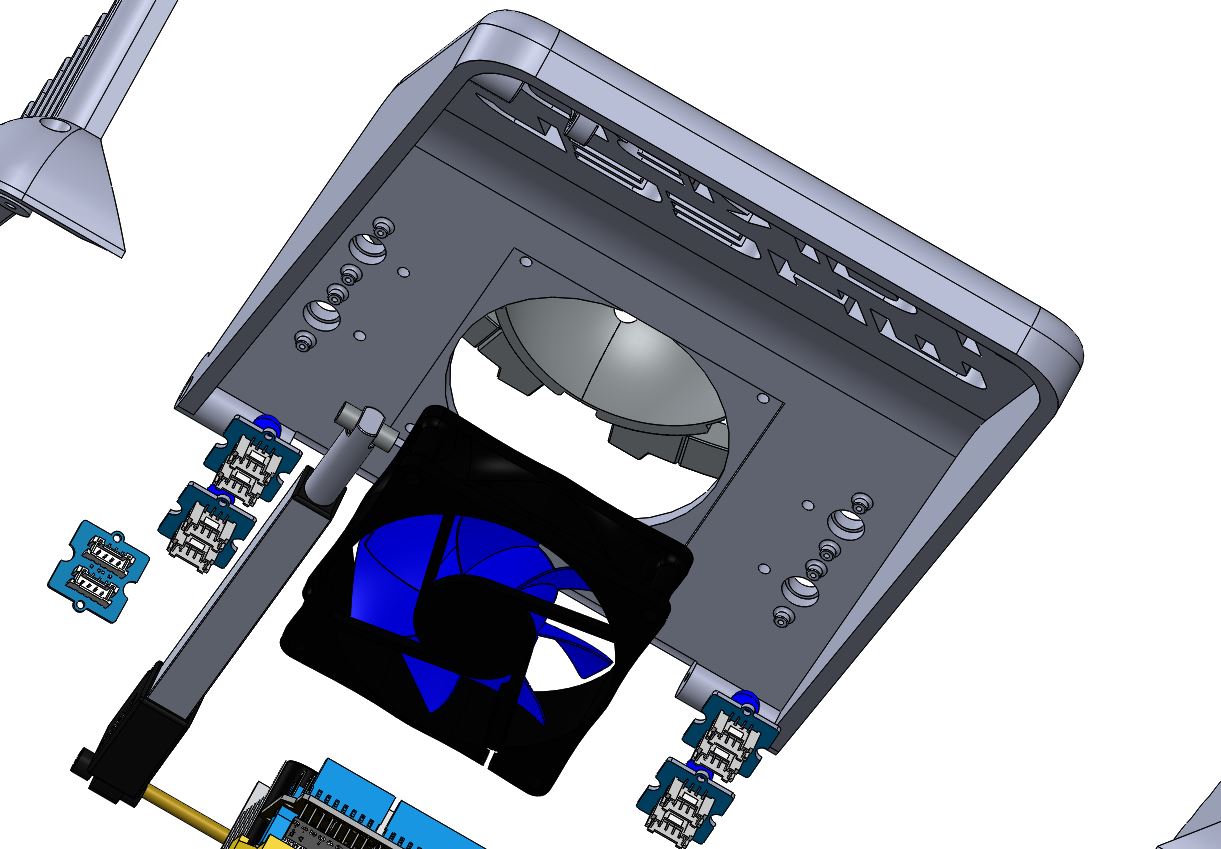
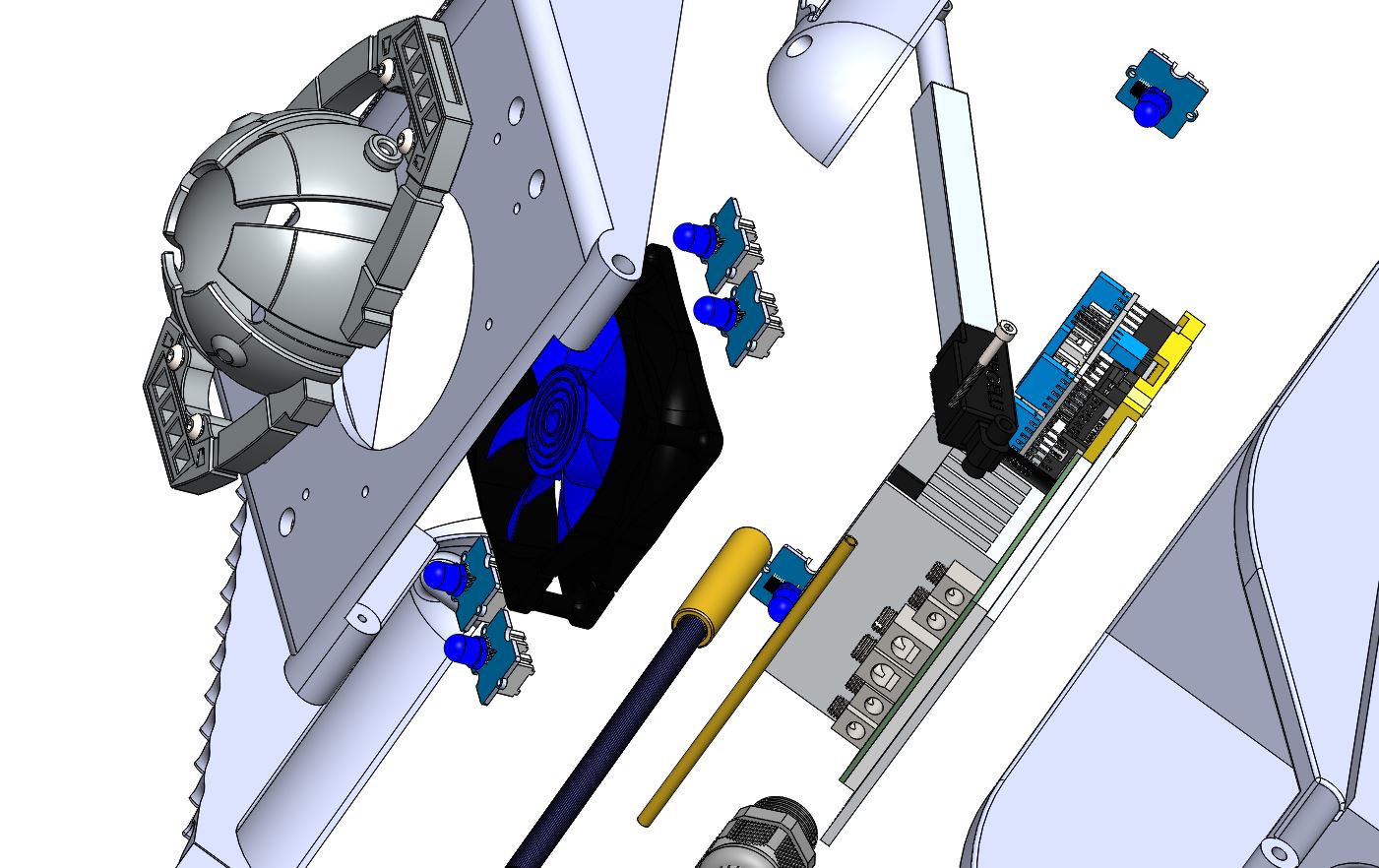
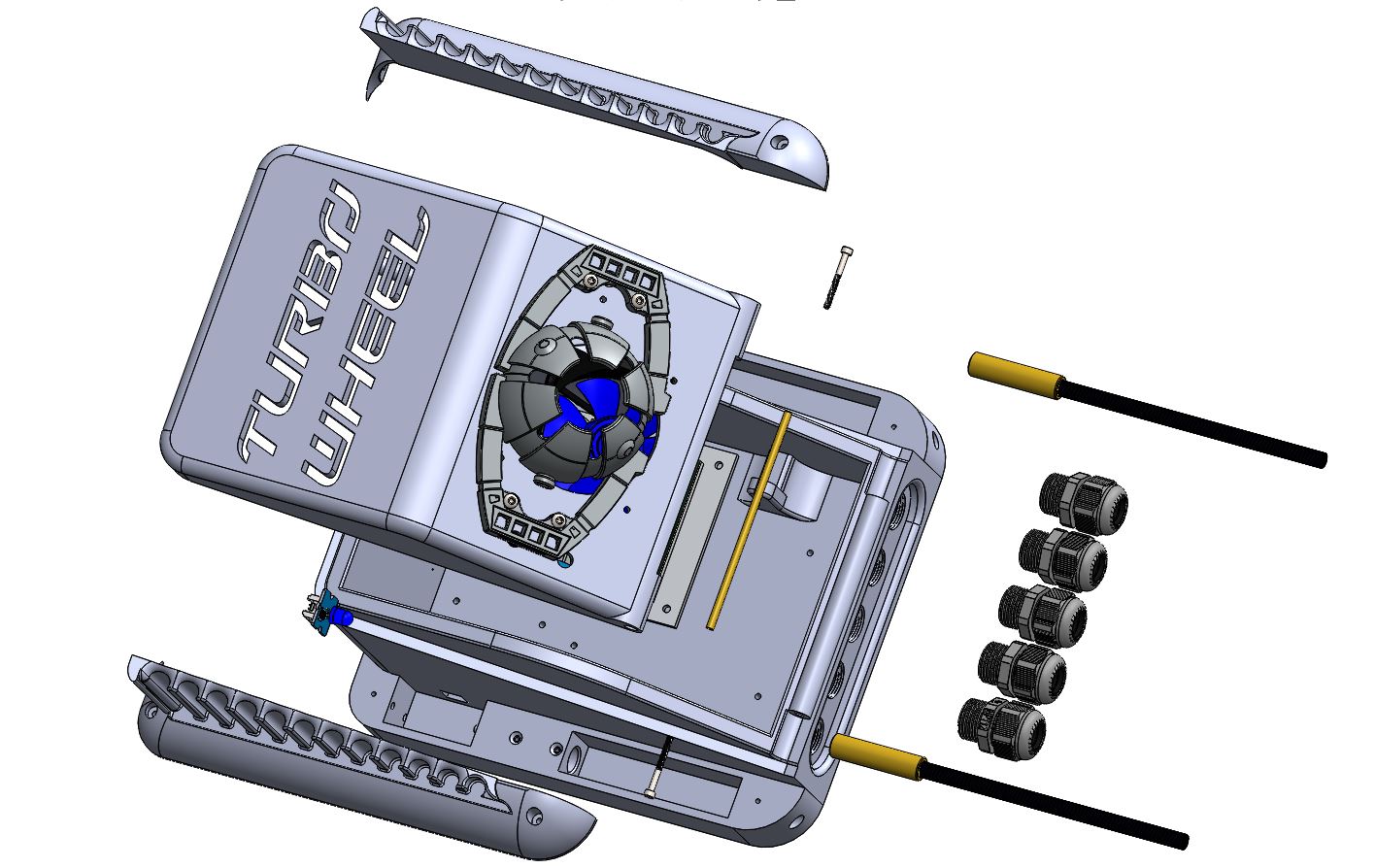
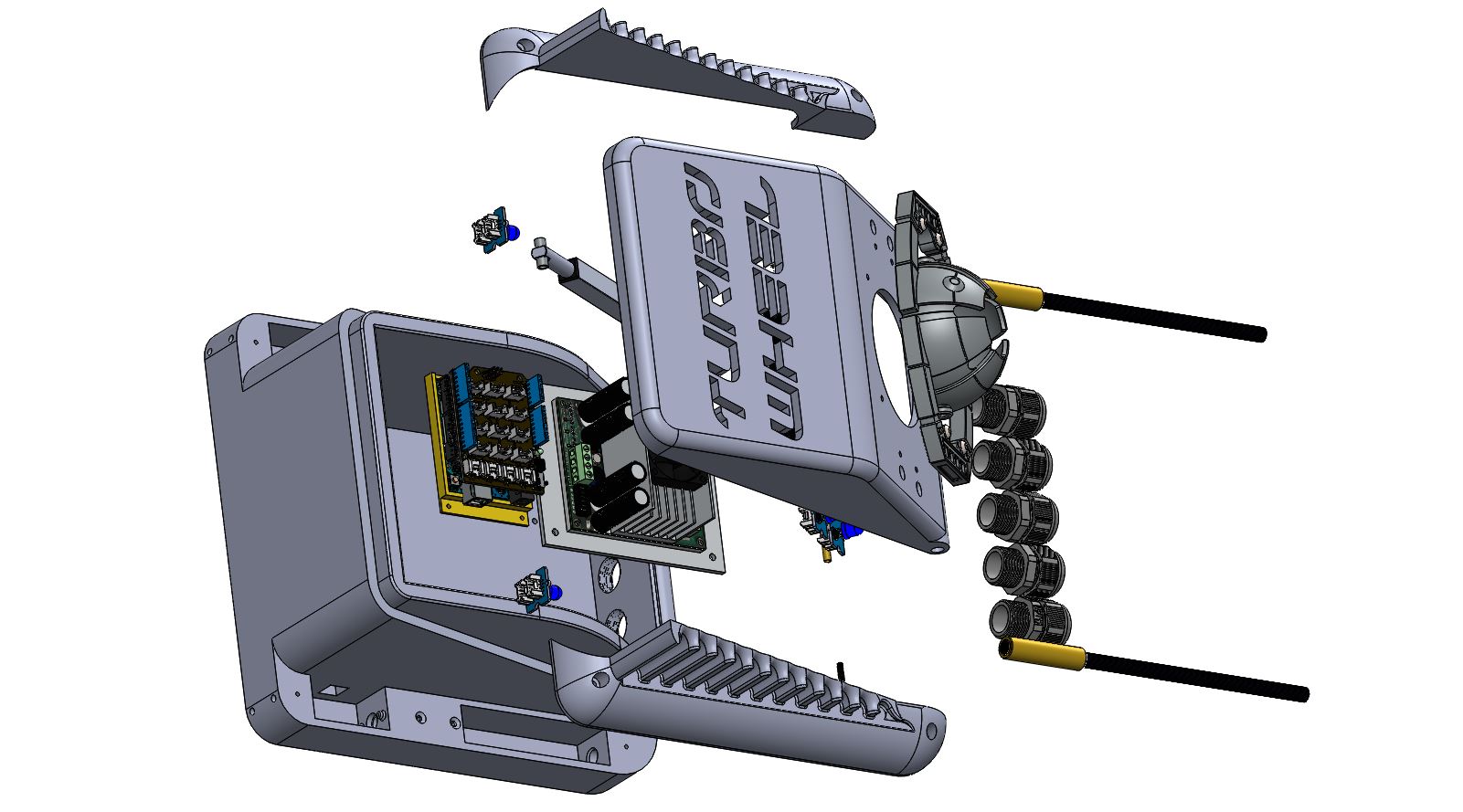
Le châssis du robot Maya fonctionne avec un variateur de type SaberTooth 2x60A. Ce variateur mérite un coffret de protection digne de Maya .Voici donc la version définitive du coffret.
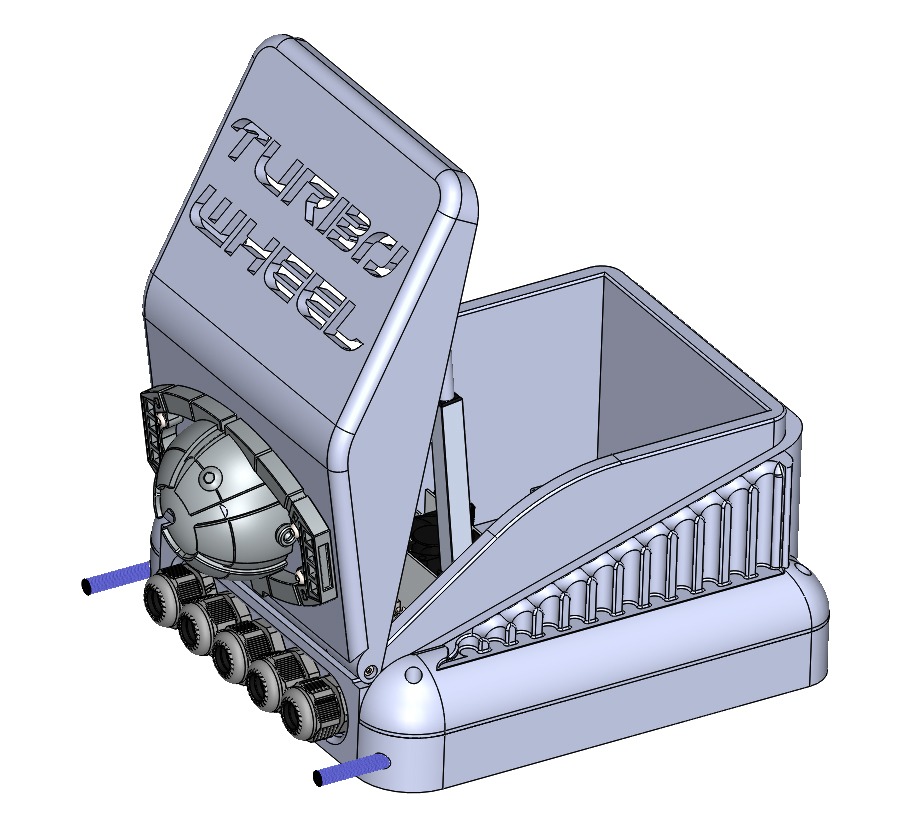
Coffret tuning pour variateur de propulsion – RedOhm
Description :
Protection du variateur de propulsion SaberTooth 2x60A
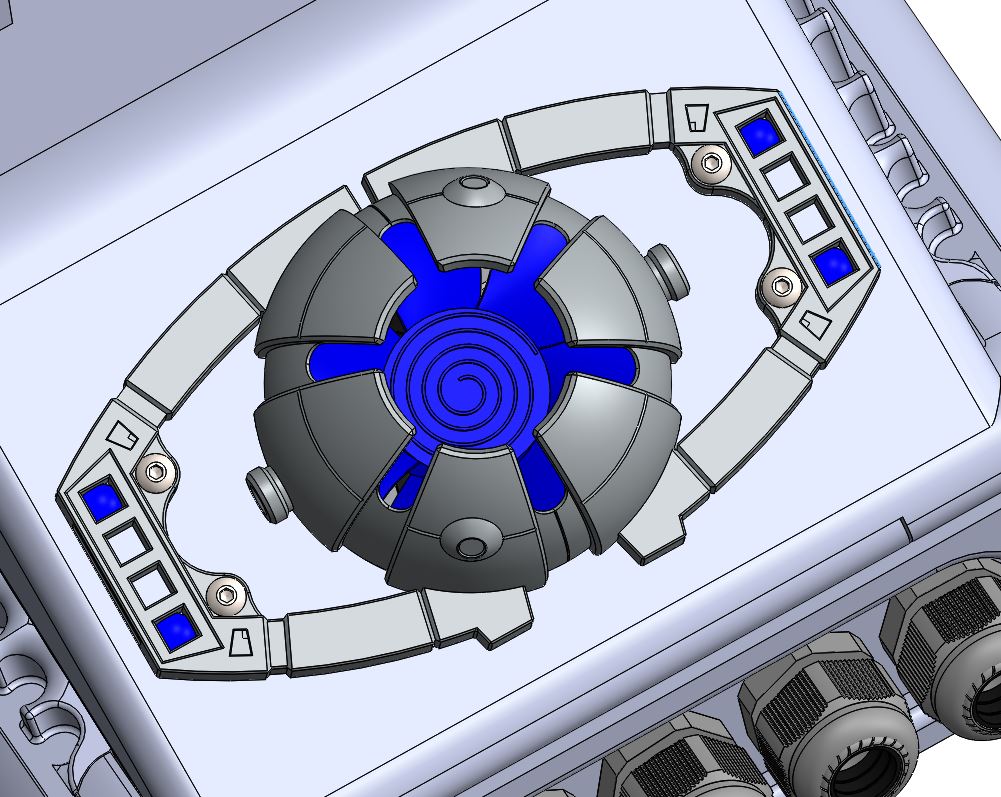
Ouverture du coffret par vérin électrique avec détecteur de gestes de chez Grove ,
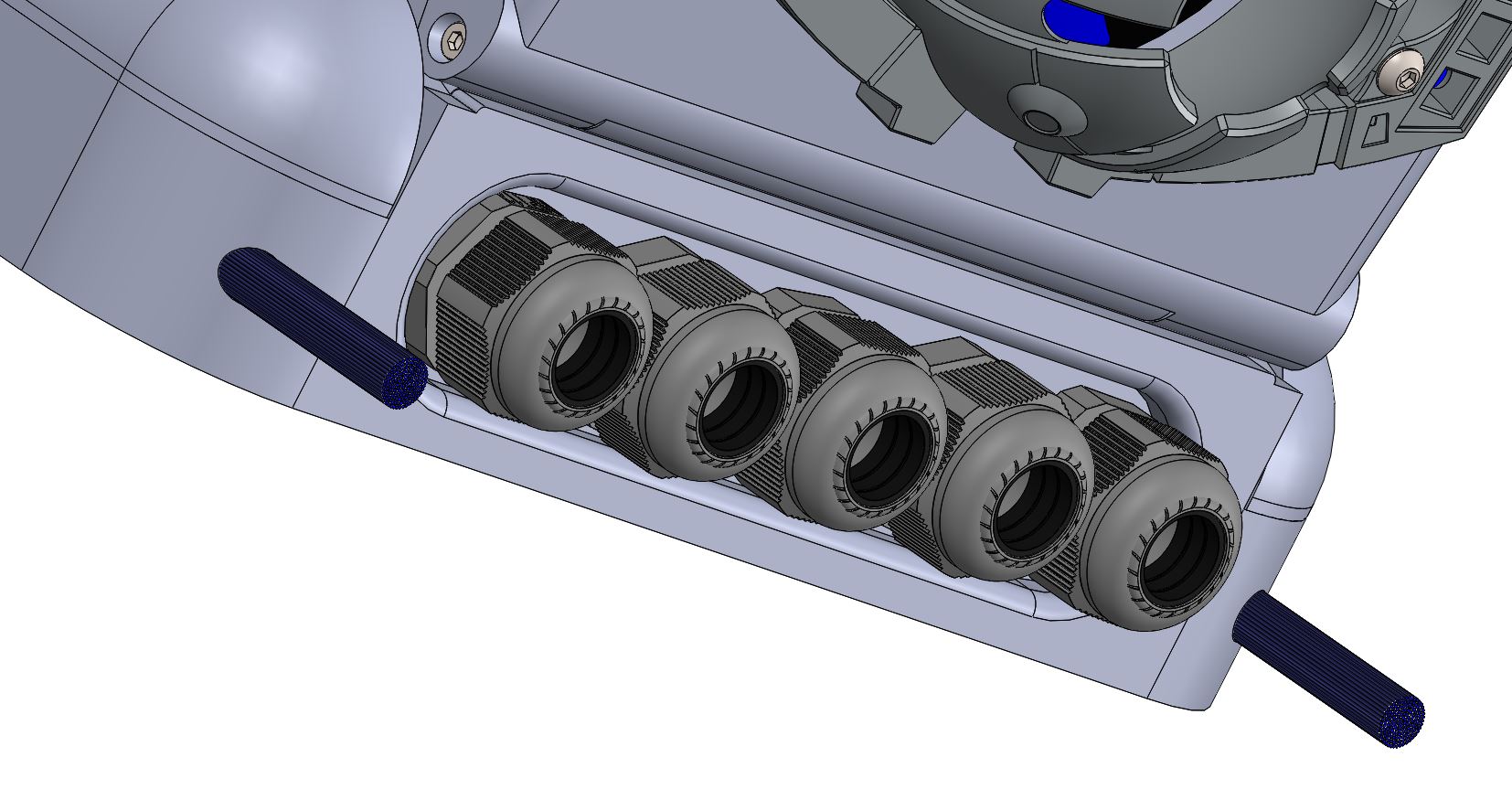
Du tuning avec éclairage des gaines moteurs en fibre optique dépolie, et signalisation de l’état variateur sur LED RGB en face avant et enfin refroidissement avec ventilateur diamètre 80 bleu
–
| Diaporama ci-dessous du coffret variateur |
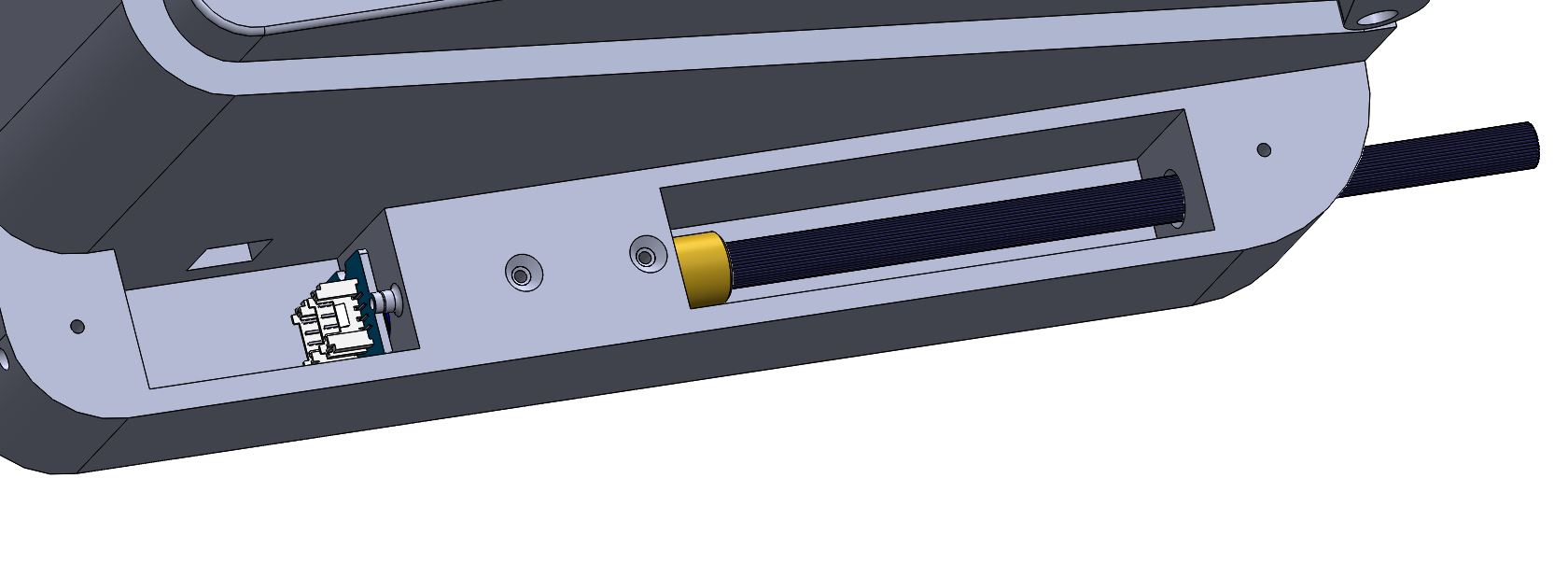
Type de matériel utilisé :
Actionneur linéaire L12-100-6R: L’actionneur maintient sa position en cas de coupure d’alimentation, à moins que la force appliquée n’excède la force de maintien.
Caractéristiques de l’actionneur linéaire : |
||
| Alimentation: 6 Vcc | Précision: 0,3 mm | Courant de blocage: 450 mA |
| Contrôle: signal RC servo | Réduction: 100:1 | Niveau sonore: 55 dB à 45 cm |
| Course maxi: 100 mm | Force: 23 N à 6 mm/s | Indice de protection: IP54 |
| Vitesse à vide: 12 mm/s | Force de maintien: 80 N | T° de travail: -10°C à +50°C |
| Précision: 0,3 mm | Cycle de charge: 20% | Section: 15 x 18 mm |
| Longueur: 160 mm au repos | Connectique: fiche JR | Poids: 56 g |
–
Led 8 mm RGB Grove 104030006 :Ce module led RGB 8 mm est compatible Grove et permet d’obtenir une couleur au choix à partir d’une sortie d’une microcontrôleur

Led 8 mm RGB Grove 104030006 – RedOhm
Caractéristiques de la Led 8 mm RGB Grove |
||
| Interface: compatible Grove | Alimentation: 5 Vcc | Couleur: RGB |
| Dimensions: 20 x 20 x 25 mm | ||
| Retour au sommaire |
![]()
06/08/2017
|
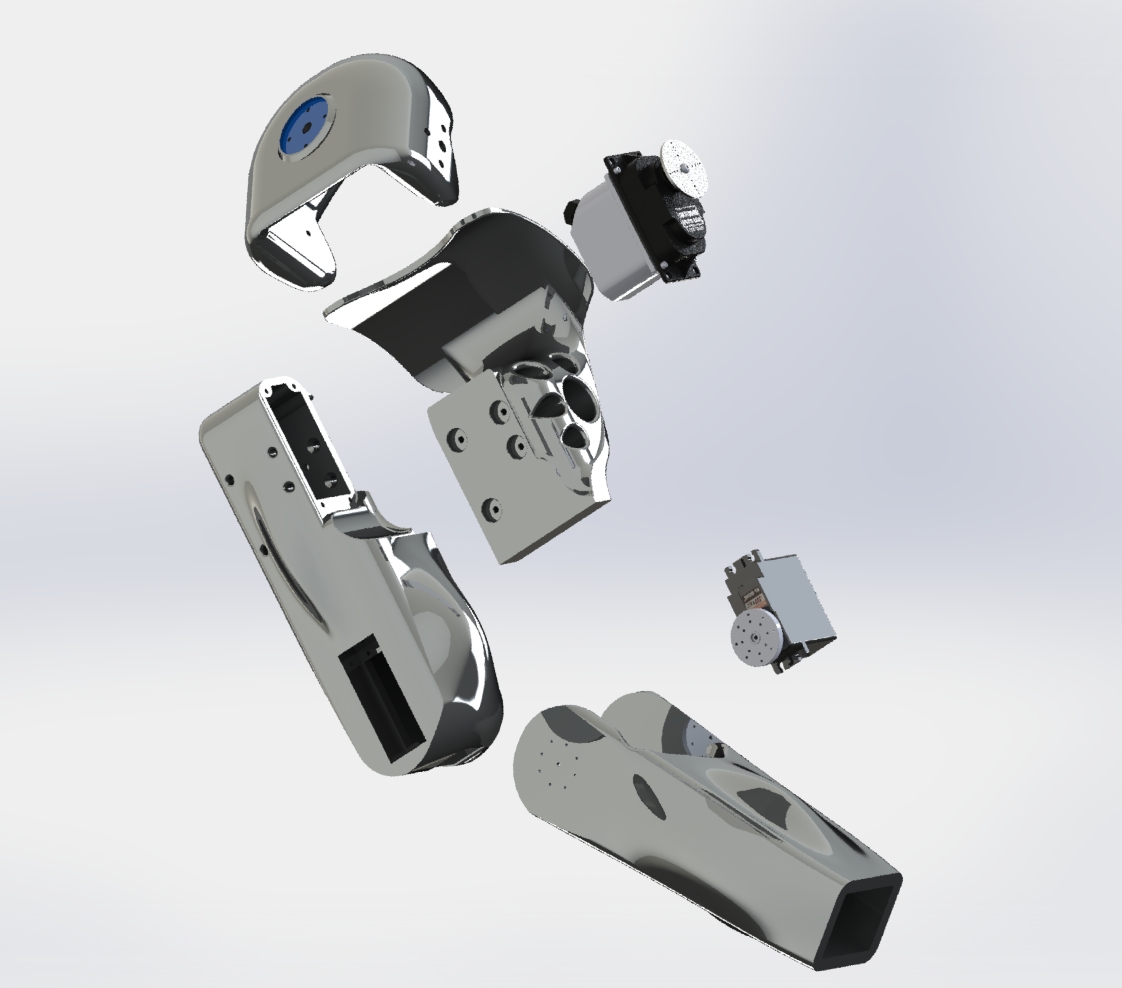
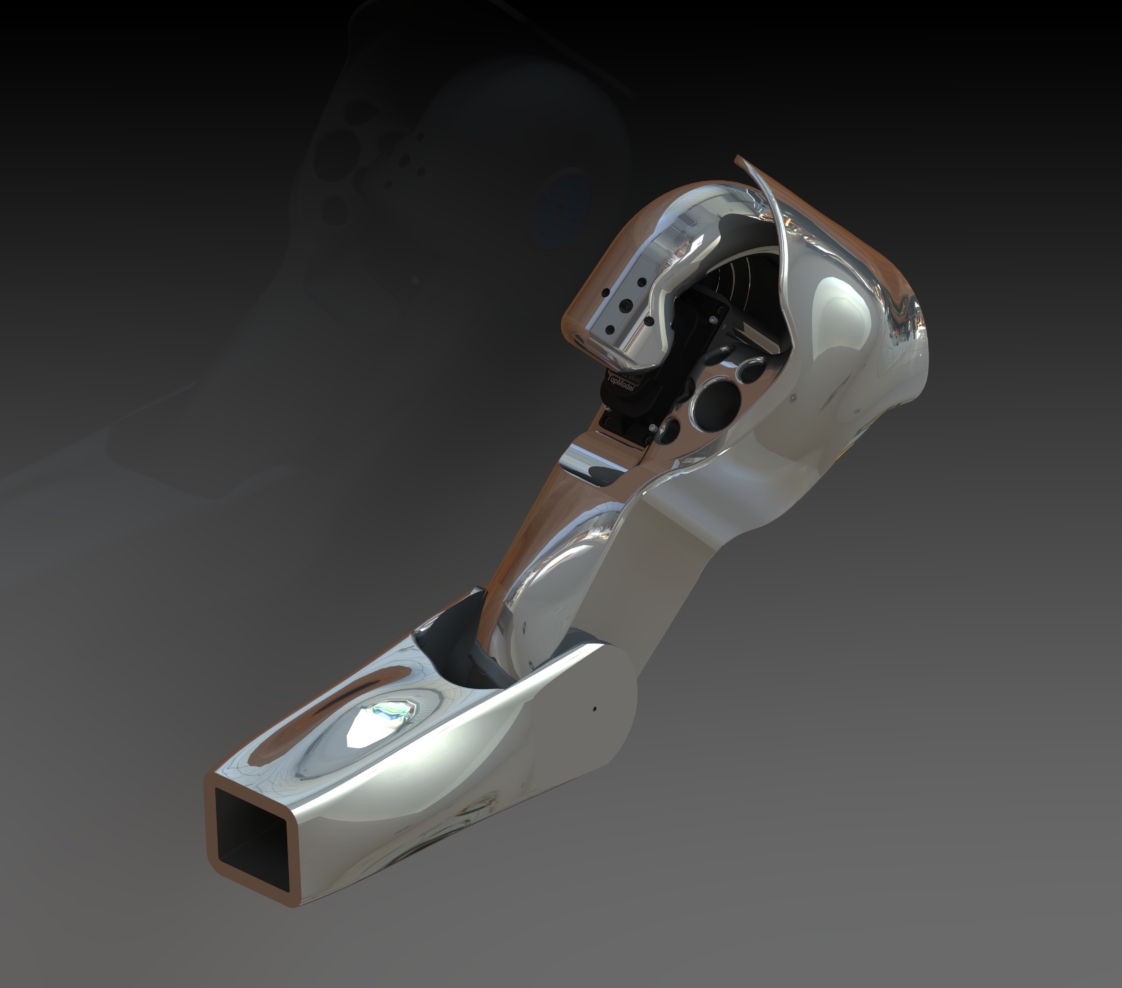
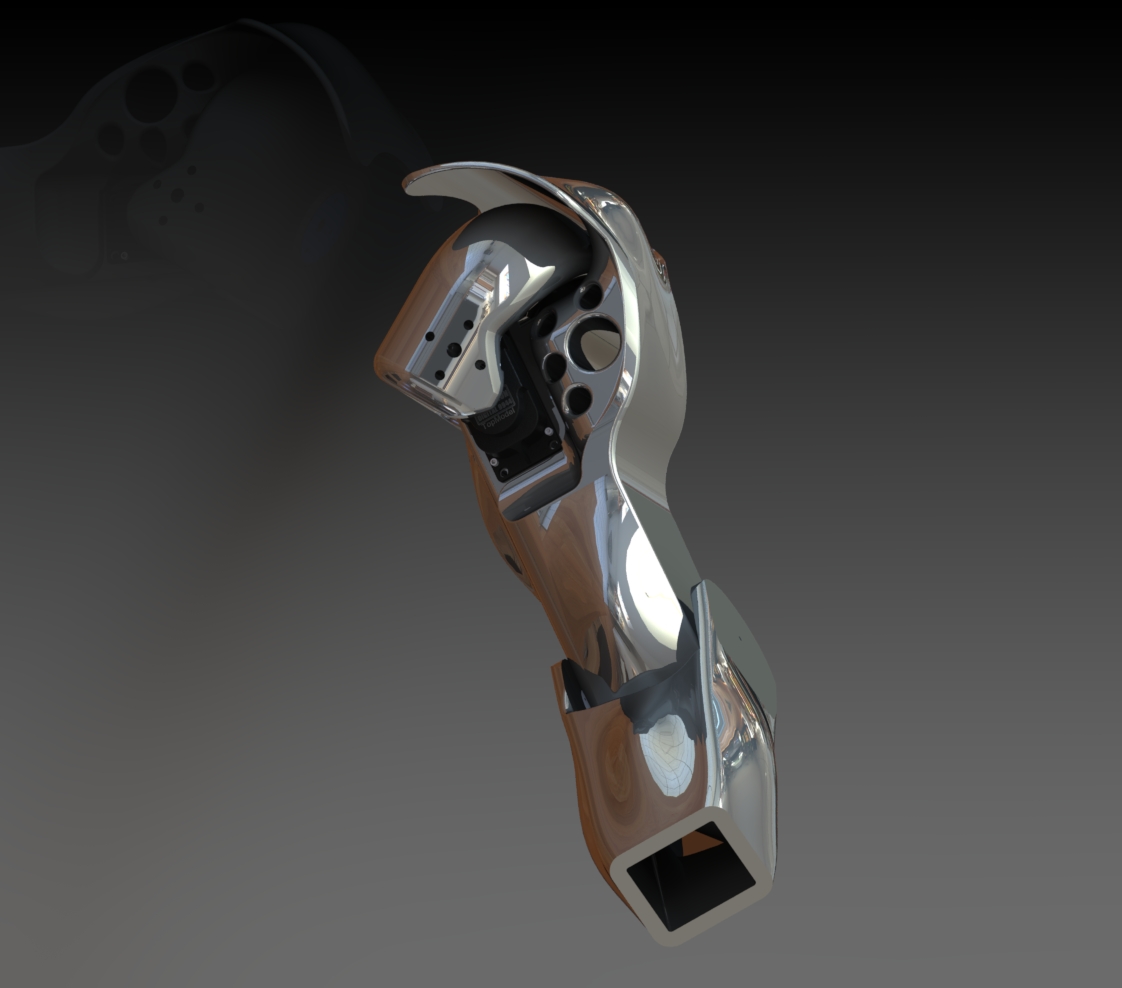
La structure du châssis de Maya est enfin terminée. Nous avons donc passé aux essais de roulage qui sont avérés plus que satisfaisant. Puisque le cahier des charges nous imposait une charge utile de 50kg, une vitesse de 5 à 6 km/h, un freinage très rapide avec récupération d’énergie. Sur cette vidéo, vous verrez donc le déplacement du châssis mais aussi les conseils techniques pour la création des pièces en aluminium.
La deuxième phase vient d’être lancée. C’est la partie câblage de l’ensemble du châssis. Voici le cahier des charges.
- Le groupe moto propulseur doit être refroidi aussitôt que la vitesse des groupes excède 50°.
- Le châssis possède 1 coupe batterie à l’arrière.
- De chaque côté du châssis, il y a un arrêt d’urgence qui coupe l’ensemble du robot sur la partie puissance. L’intégrité de son système de contrôle reste toujours alimentée malgré un arrêt d’urgence.
- Le coffret qui détient le variateur possède son propre système de refroidissement. Il est contrôlé par la carte Arduino qui se trouve à l’intérieur de celui-ci.
- Un interrupteur de by passe vous permettra de passer en radio commande pour pouvoir déplacer le robot à des fins de maintenance ou de positionnement.
Les plans mécaniques seront bientôt disponibles, de même que l’ensemble des schémas électriques qui régissent le châssis.
| Retour au sommaire |
![]()
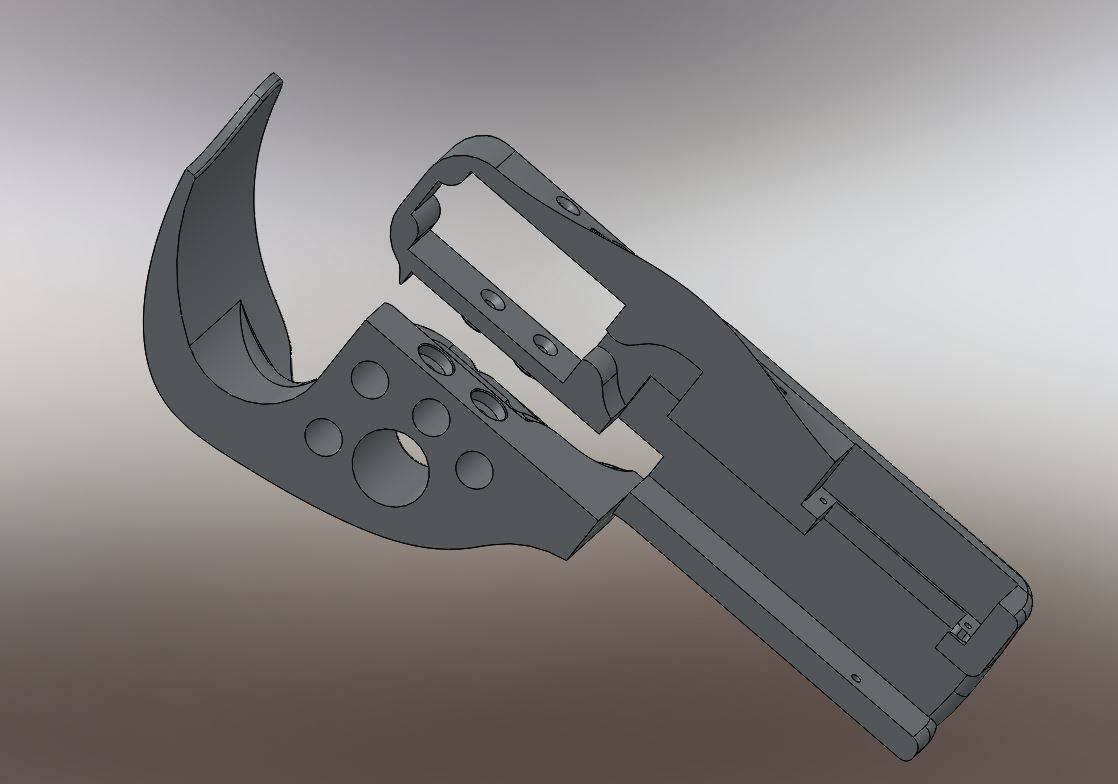
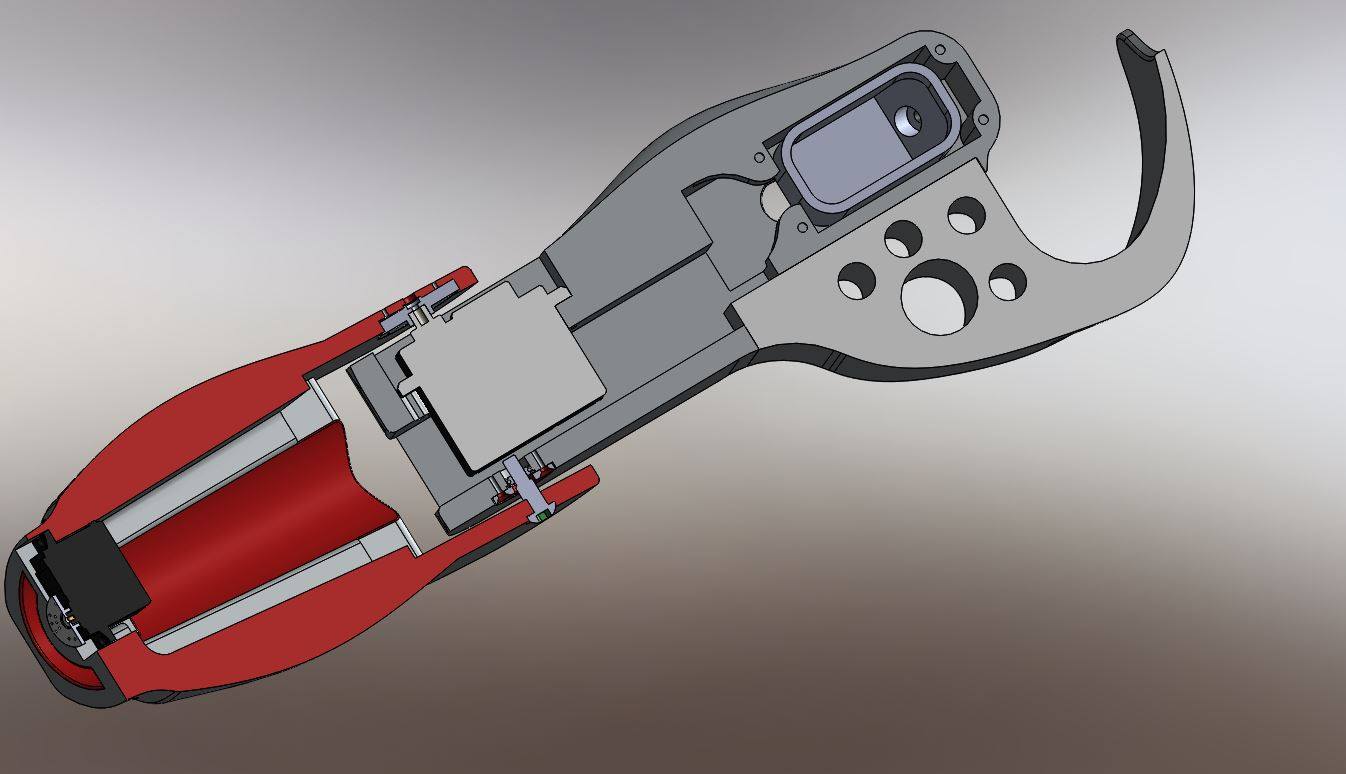
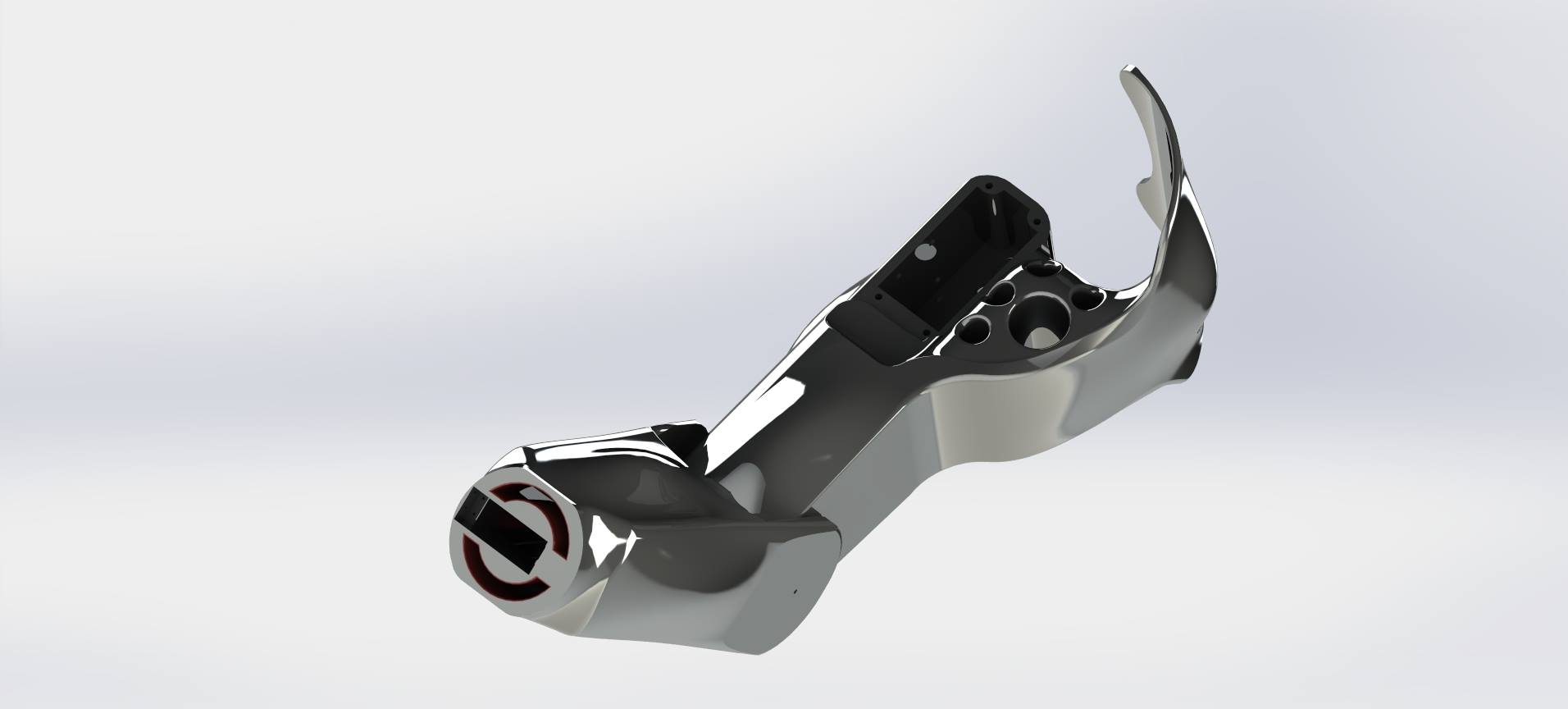
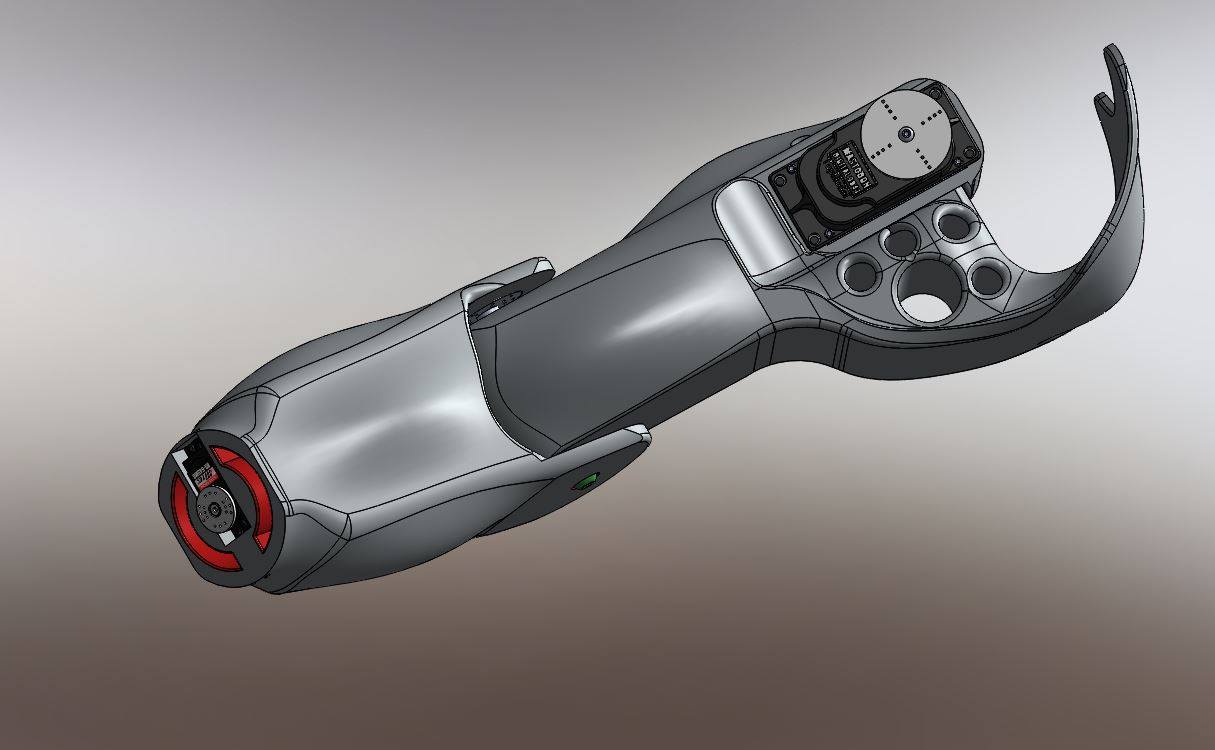
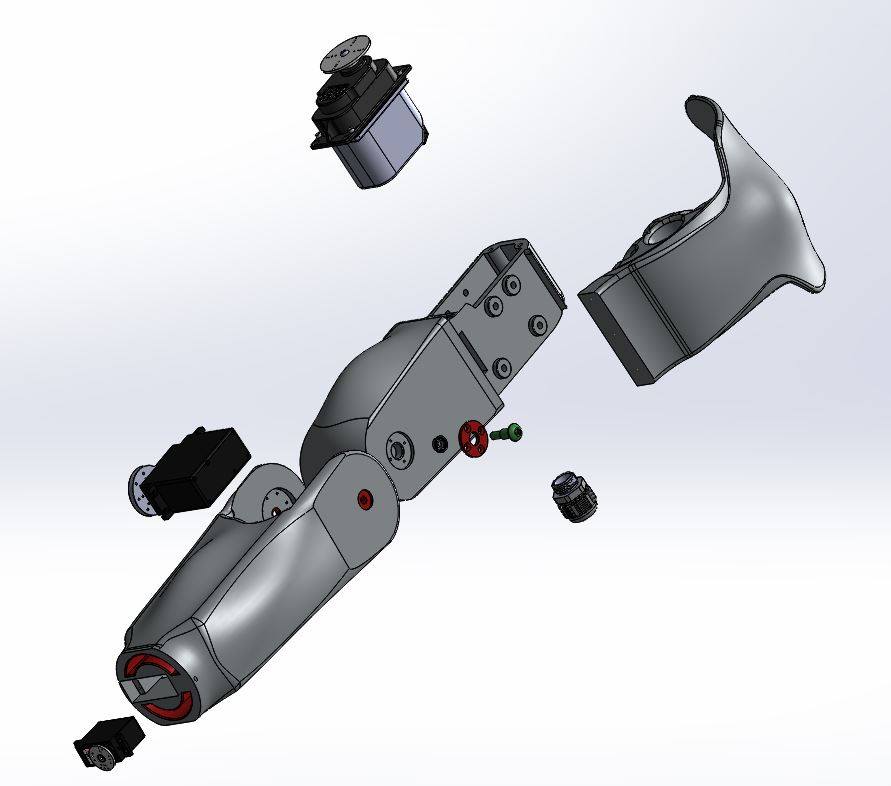
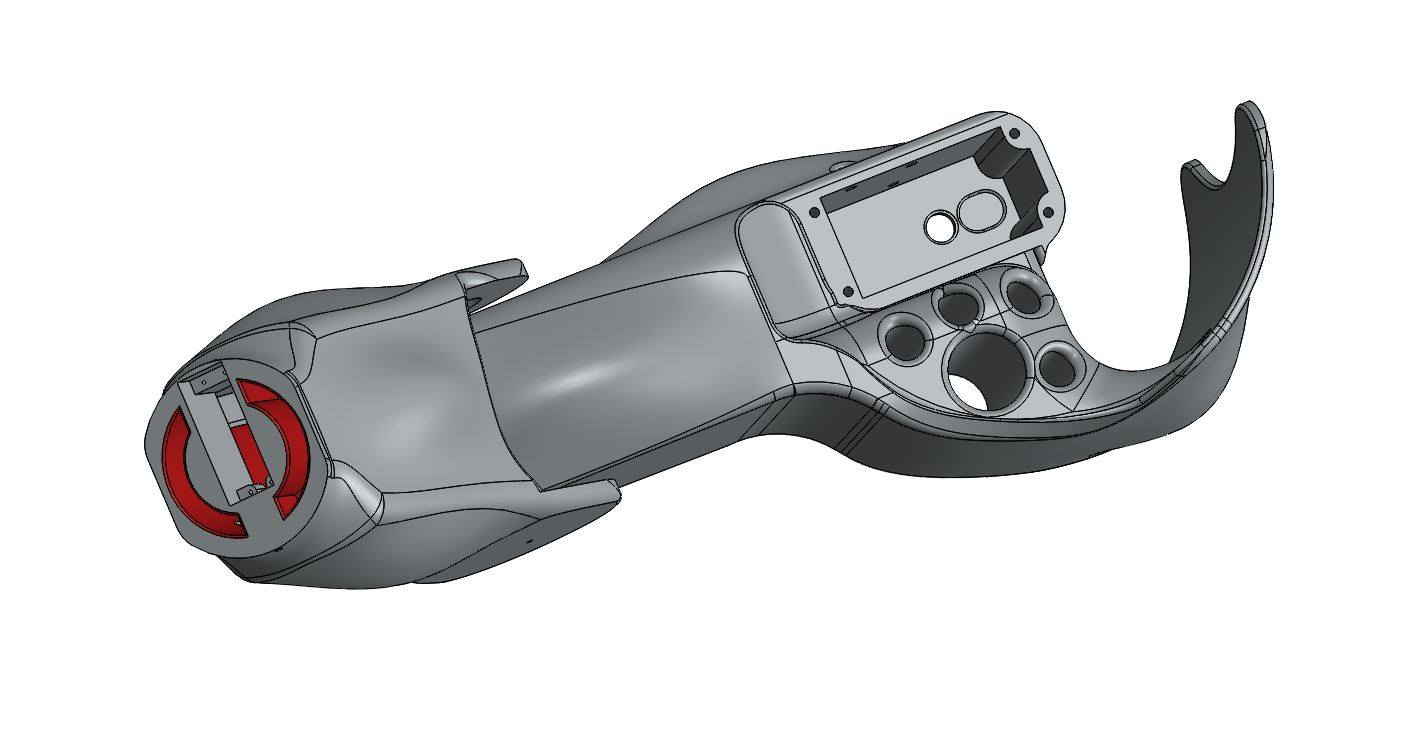
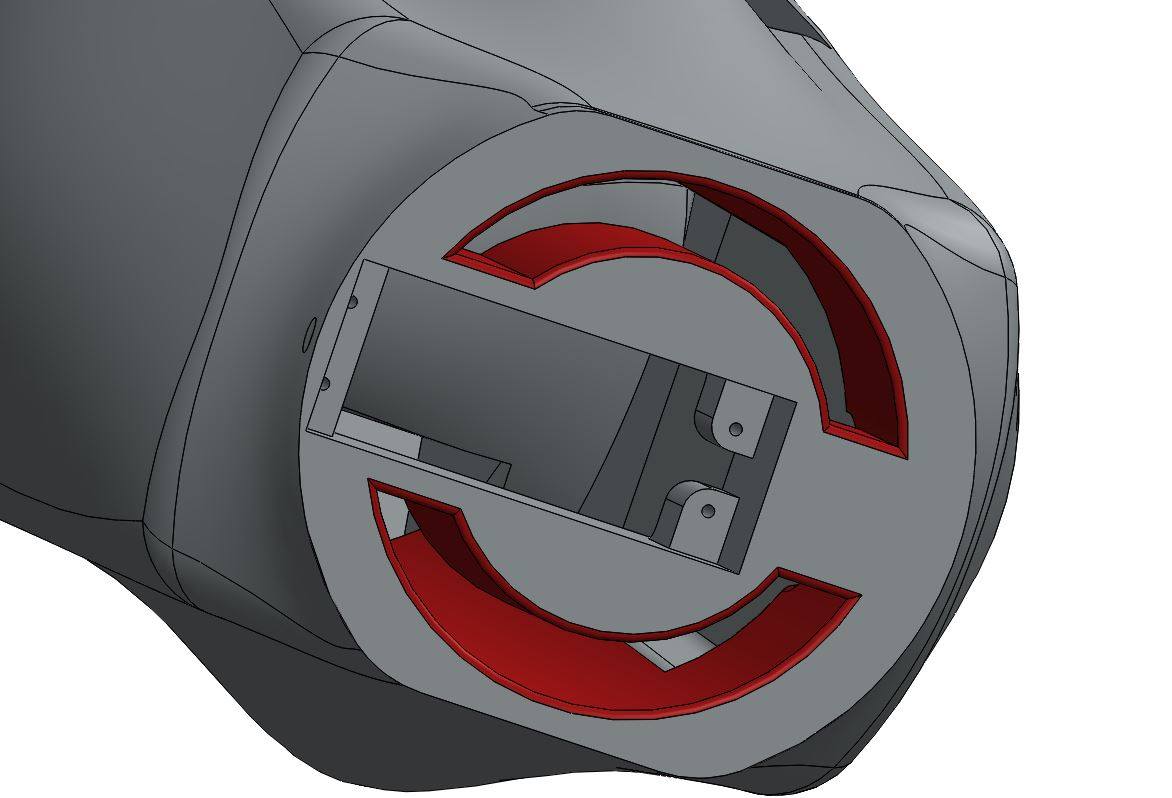
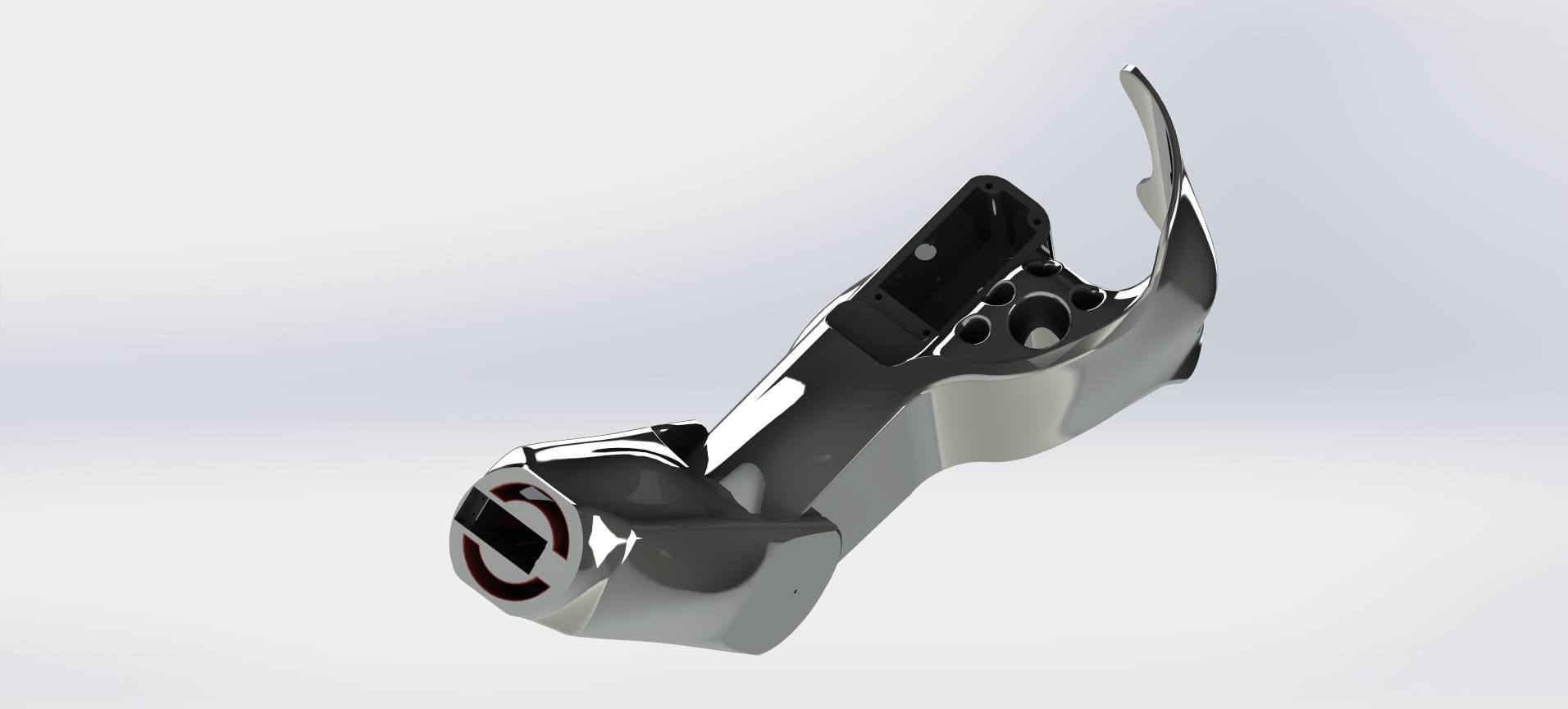
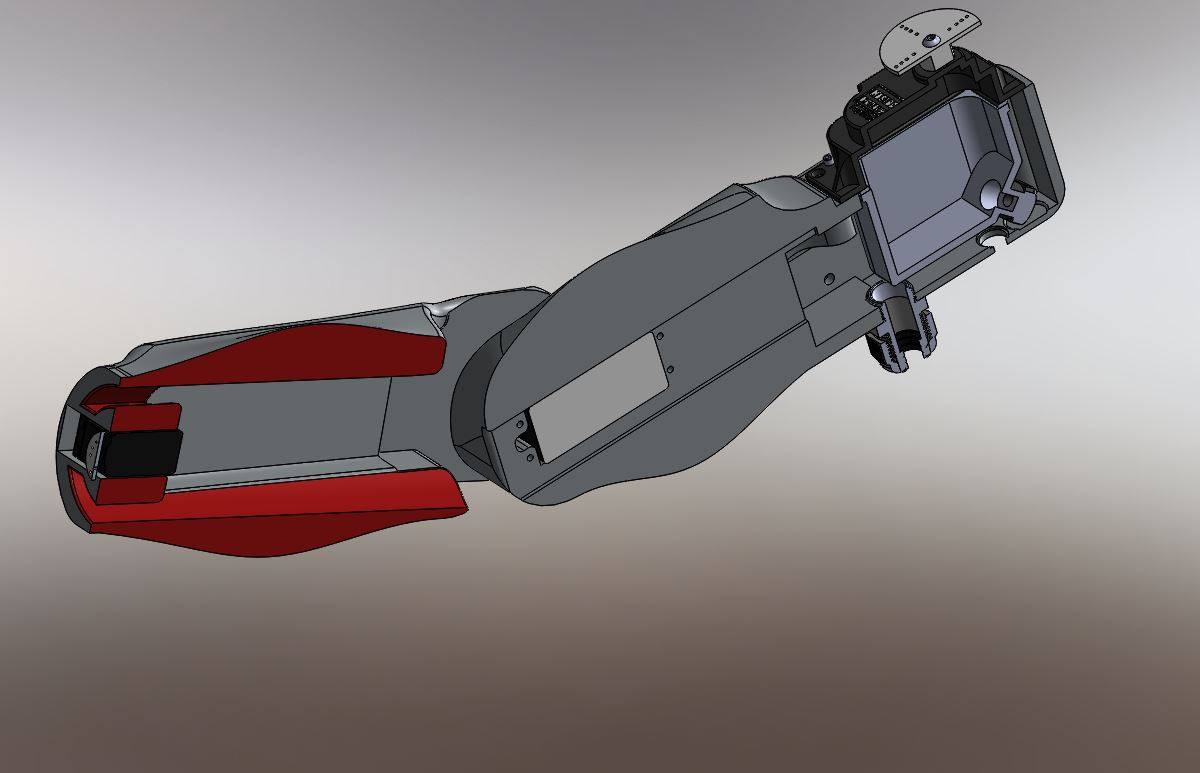
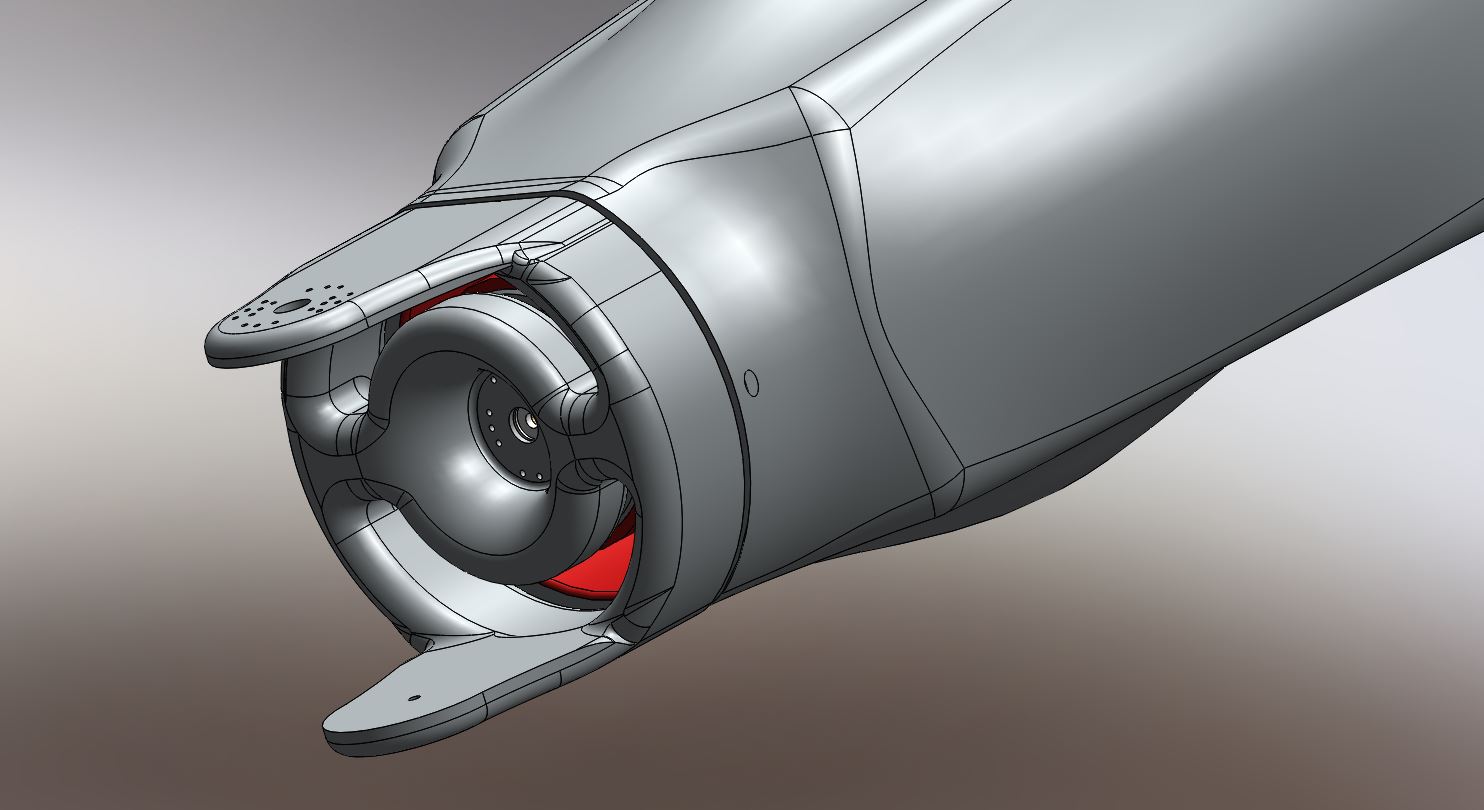
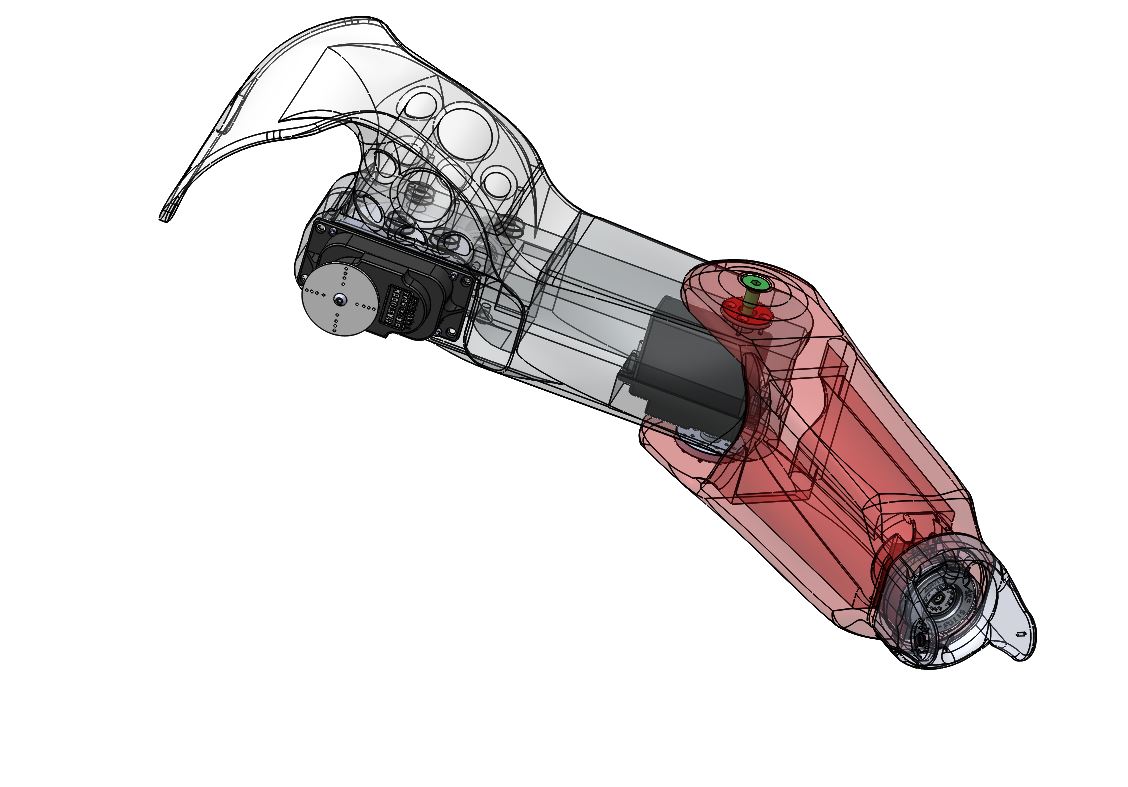
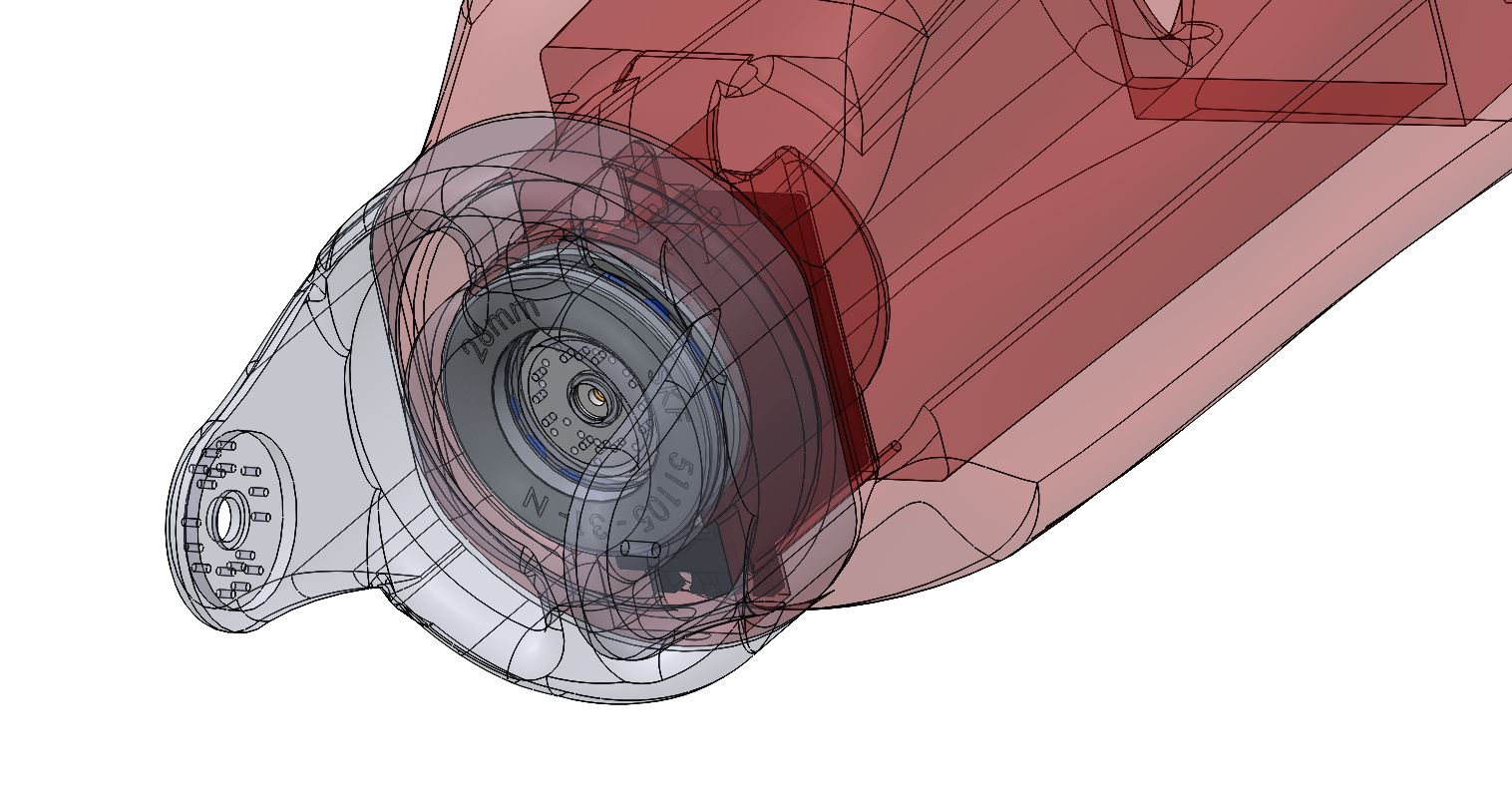
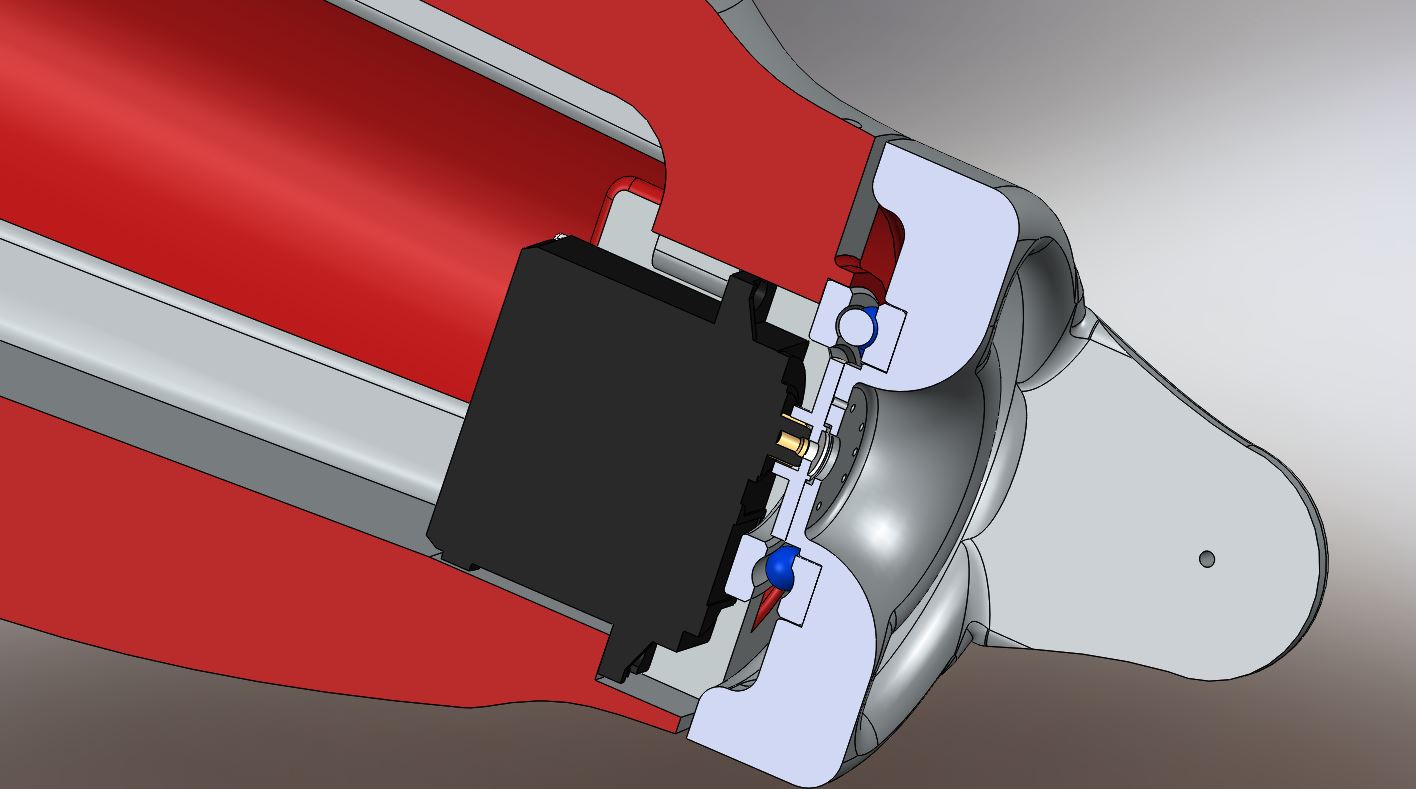
Vue du fonctionnement de la main de Maya |
–
Pour le fonctionnement des doigts, nous allons utiliser le servomoteur Batan S1123 . Pourquoi ce servomoteur ? Est bien simplement car il n’est pas comme les autres. Il dispose d’un fil de retour d’information (feed-back), cette information nous permet de connaître la position du servomoteur précisément. La valeur lue est une valeur analogique, qui peut être lu facilement soit sur une carte Arduino soit sur la carte Ez-Robot. Cette information nous sera utile pour le cas suivant, sommes-nous bien arrivés à la valeur fixée, si l’information de retour ne correspond pas à la valeur fixée on n’en déduira que le moteur est bloqué et dans ce là, le servomoteur chauffe, et au pire des cas, il peut se détruire.
–
Fiche technique du servomoteur Batan S1123 |
|
| Poids | 13.82g |
| Dimensions | 11.57,32.71,31.76mm |
| Couple | 13.kg.cm |
| Type de pignon | Plastique |
| Roulement à billes | 2BB |
| Nombre de dents | 22 |
| Retour au sommaire |
![]()
![]()