
–
Mise à jour : 13/01/2019 : L’équipe RedOhm vous présente le robot Nestor. Ce nouveau compagnon est prévu surtout pour être un robot de compagnie.

Cablage de la base mobile de chez DFRobot dans la premiere version – RedOhm –
Sommaire :
- 21/03/2018 : Etude du montage des yeux ( film et diaporama )
- 22/03/2018 : Etude de la tête premier pas ( photo , film )
- 27/03/2018 : Explication du mode de construction du robot Nestor ( vidéo )
- 18/07/2018 : Impression du visage de Nestor ( diaporama )
- 22/07/2018 : Montage du visage du robot Nestor ( vidéo )
- 26/07/2018 : Montage de la tête du robot Nestor
- 23/09/2018 : Etude du nouveau chassis du robot Nestor.
- 04/11/2018 : Etat d’avancement du châssis de Nestor
- 13/01/2019 : upgrade du robot Nestor
- Retour au menu principal de Nestor
.
Retour au sommaire
![]()
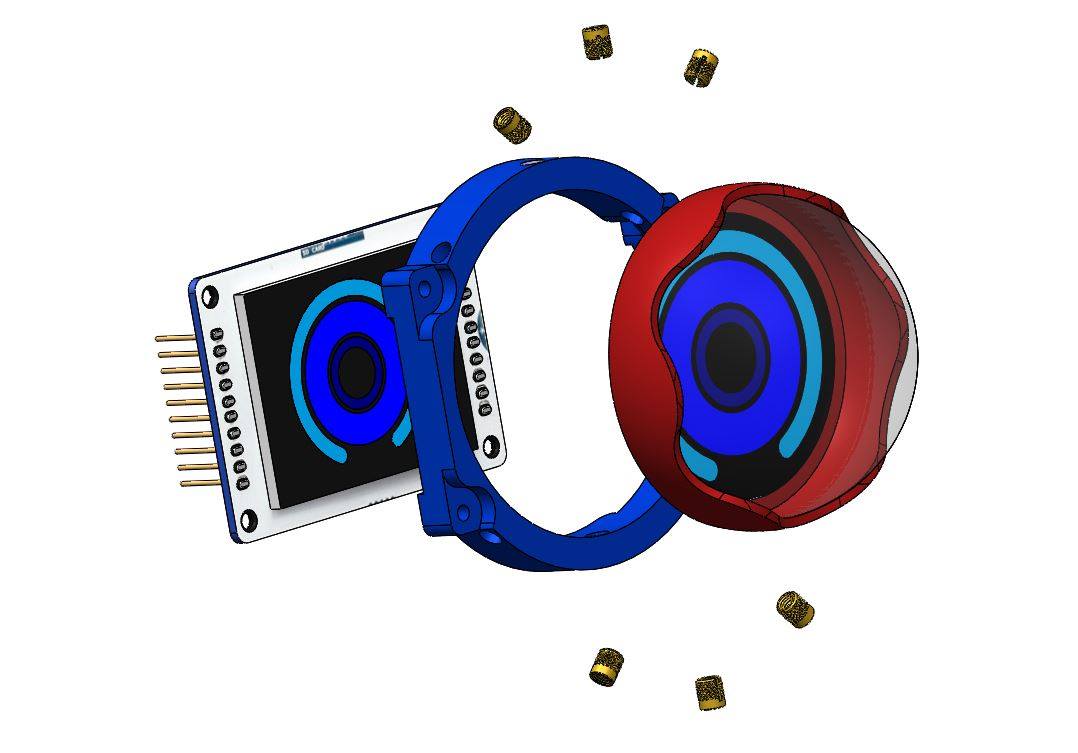
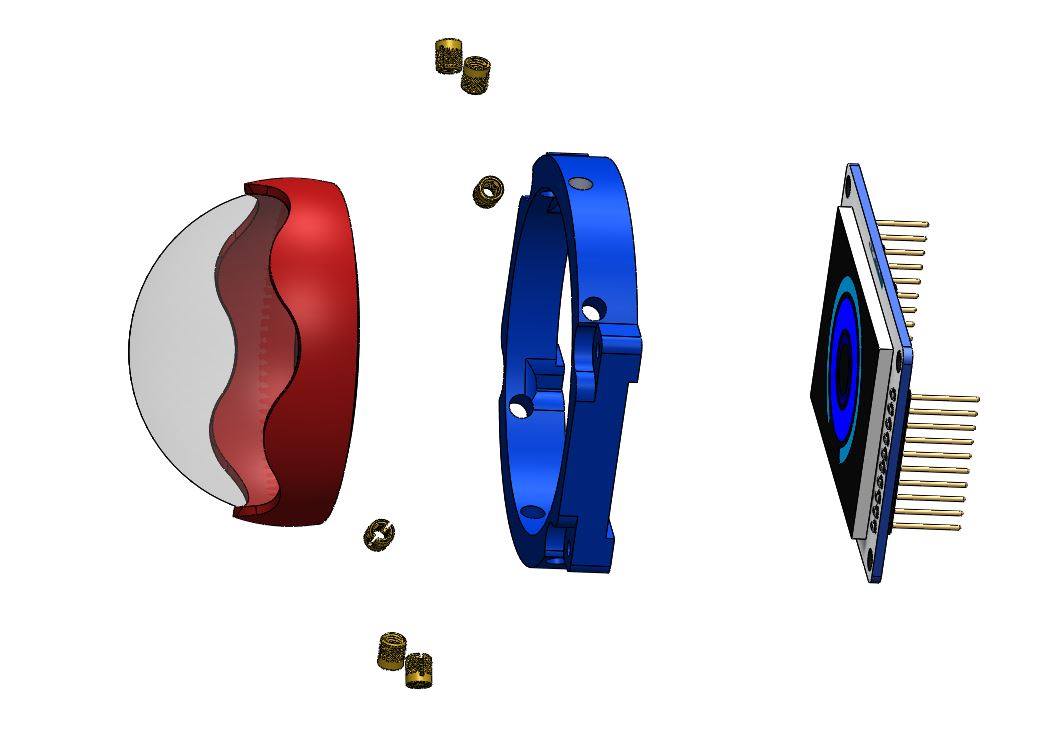
21/03/2018 : Etude du montage des yeux |
Étude du regard du robot Nestor. Nous allons nous attarder sur la construction de l’œil. Vous remarquerez que nous avons réutilisé pour les yeux les écrans LCD de chez Arduino référence A0000096. Ensuite sur ses écrans LCD nous avons prévu de poser une loupe afin d’augmenter l’intensité du regard
Matériel utile au montage des yeux .
- Ecran LCD 1,77 » A000096 : Le module est équipé d’un port micro-SD qui permet notamment de stocker et afficher des images bitmap. Il communique avec la carte Arduino via le port SPI.
- Alimentation : 5 Vcc
Ecran : 1,77″
Couleurs : 262000
Résolution : 160 x 128 pixels
Port : SPI
Support carte : micro-SD
Température de service : -20 à +70°C
Dimensions : 60 x 42 x 15 mm
Référence fabricant : A000096
Site officiel Arduino : www.arduino.cc
- Alimentation : 5 Vcc
- Loupe à poser Coil, x 1.7, lentille de 50mm, 18.9dioptrie :
- Taille : 50mm dia. 32mm de haut .
- Grossissement : 1,7 x (utilisé)
- Puissance (dioptres) : 18.9
- Poids : 56g
- Fabricant : Coil
- Référence fabricant : 5850/34
- Code commande RS composant : 424-4327
Diaporama attendez 5 secondes

.
Retour au sommaire
![]()
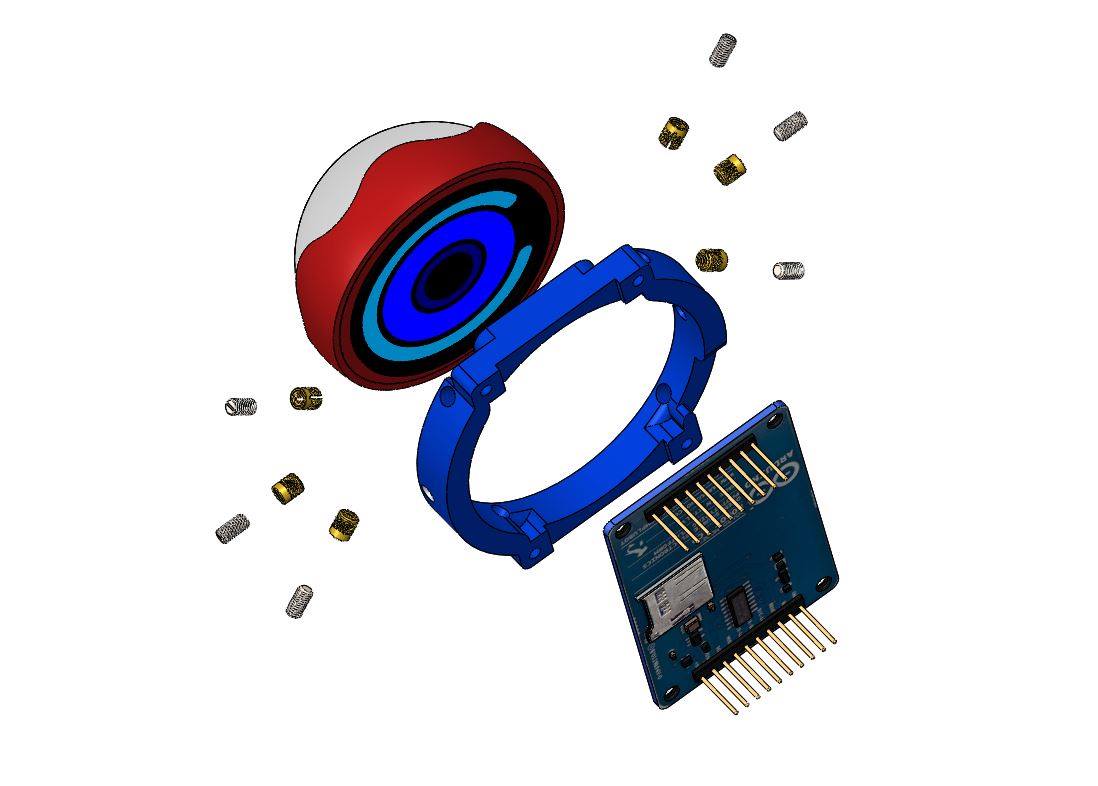
22/03/2018 : Etude de la tête premier pas |
Eclatée de la tête de Nestor – RedOhm –
–
Matériel utile au montage de l’ensemble de la tête .
-
- 2 Piéce : Carte Arduino MEGA 2560 .La carte est basée sur un ATMega2560 cadencé à 16 MHz. Elle dispose de 54 E/S dont 14 PWM, 16 analogiques et 4 UARTs.
- 2 Piéce : Module bargraphe Grove 104020006 Ce module bargraphe compatible Grove est composé de 10 segments à leds (1 rouge, 1 jaune et 8 vertes) et est basé sur le contrôleur à leds MY9221.
- 2 Piéce : Ecran LCD 1,77 » A000096 : Le module est équipé d’un port micro-SD qui permet notamment de stocker et afficher des images bitmap. Il communique avec la carte Arduino via le port SPI.
- Alimentation : 5 Vcc
Ecran : 1,77″
Couleurs : 262000
Résolution : 160 x 128 pixels
Port : SPI
Support carte : micro-SD
Température de service : -20 à +70°C
Dimensions : 60 x 42 x 15 mm
Référence fabricant : A000096
Site officiel Arduino : www.arduino.cc
- Alimentation : 5 Vcc
- 2 Piéce : Loupe à poser Coil, x 1.7, lentille de 50mm, 18.9dioptrie :
- Taille : 50mm dia. 32mm de haut .
- Grossissement : 1,7 x (utilisé)
- Puissance (dioptres) : 18.9
- Poids : 56g
- Fabricant : Coil
- Référence fabricant : 5850/34
- Code commande RS composant : 424-4327
- 1 Piéce : Webcam
.
Retour au sommaire
![]()
27/03/2018 :Explication du mode de construction du robot Nestor |
.
Retour au sommaire
![]()
18/07/2018 : Impression du visage de Nestor |
Aujourd’hui , nous sommes passé à l’impression du visage du robot Nestor. L’opération d’impression de la tête n’a pas de difficultés particulières en soi, vous trouverez d’ailleurs sur la figure 1 les différents paramètres pour régler votre imprimante, en revanche le gros du travail vient du nettoyage des supports internes du visage. Nous avons dû couper l’intégralité des supports à la pince coupante puis ensuite nous avons chassé à l’aide d’un ciseau à bois les différents supports externes, ce qui donne un excellent résultat. Vous pourrez remarquer aussi que vous avez quelques photos des ouïes d’aération de la tête de Nestor, là aussi je dirais aucune difficulté particulière ni pour l’impression et encore moins pour enlever les supports. Sur les photos ,on peut distinguer que nous avons inséré des inserts pour la fixation de la carte Arduino.

Robot Nestor le visage en impression 3D – RedOhm –
Diaporama intervalle de 10 secondes ou cliquez dessus 😆







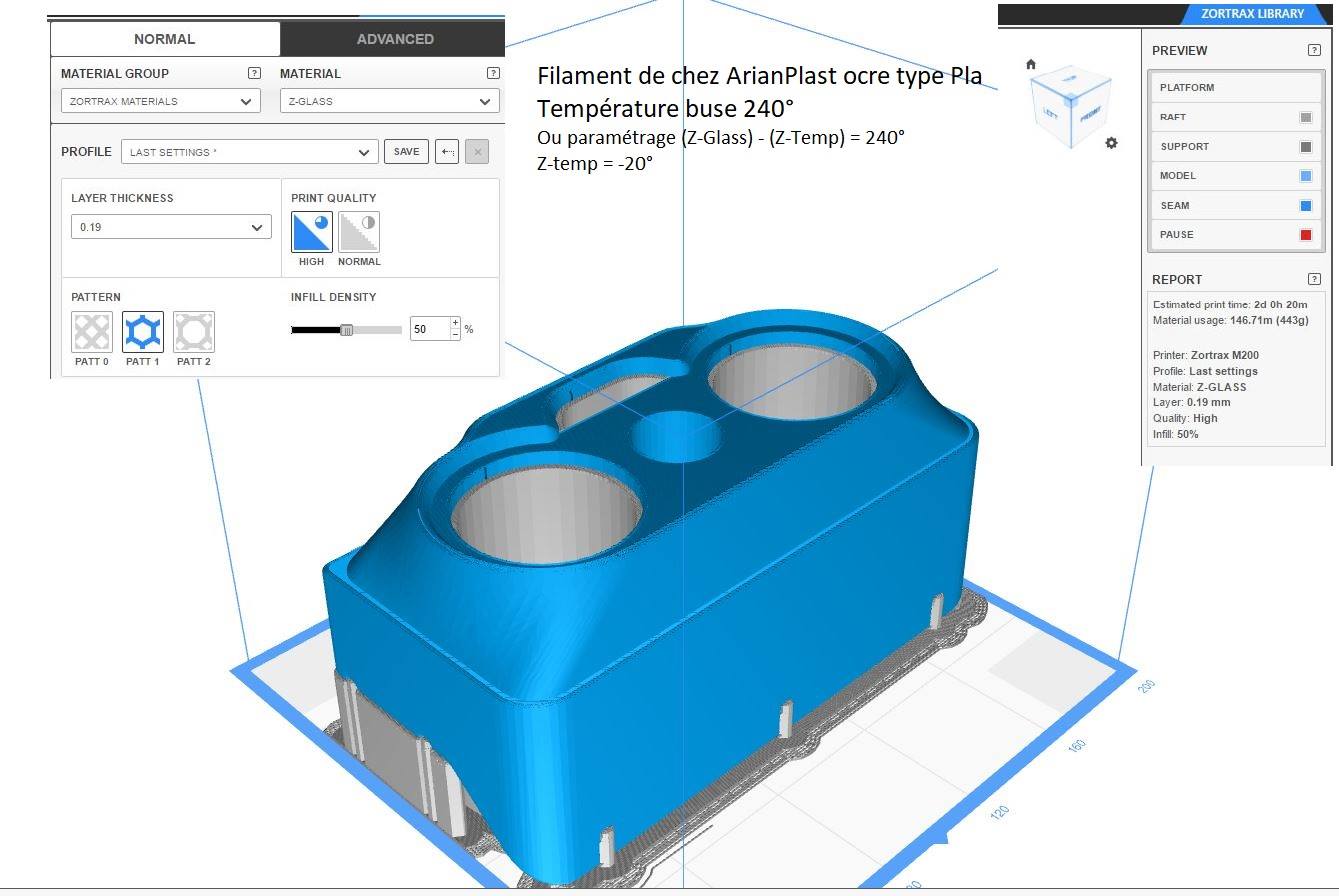
Le visage du robot Nestor paramétres pour l’impression – RedOhm –
–
Retour au sommaire
![]()
22/07/2018 : Montage du visage du robot Nestor |
–
Retour au sommaire
![]()
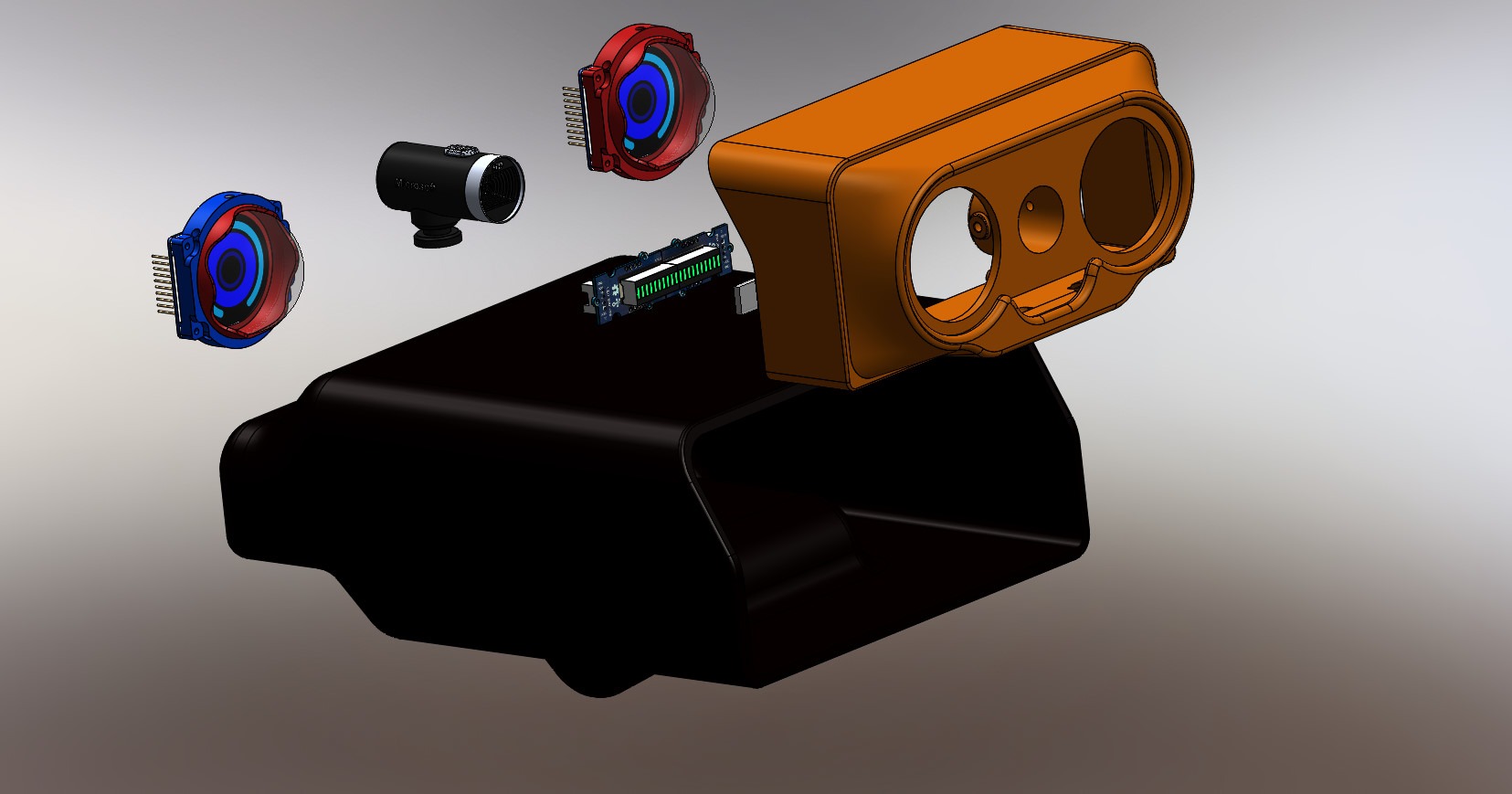
26/07/2018 : Montage de la tête du robot Nestor |
–
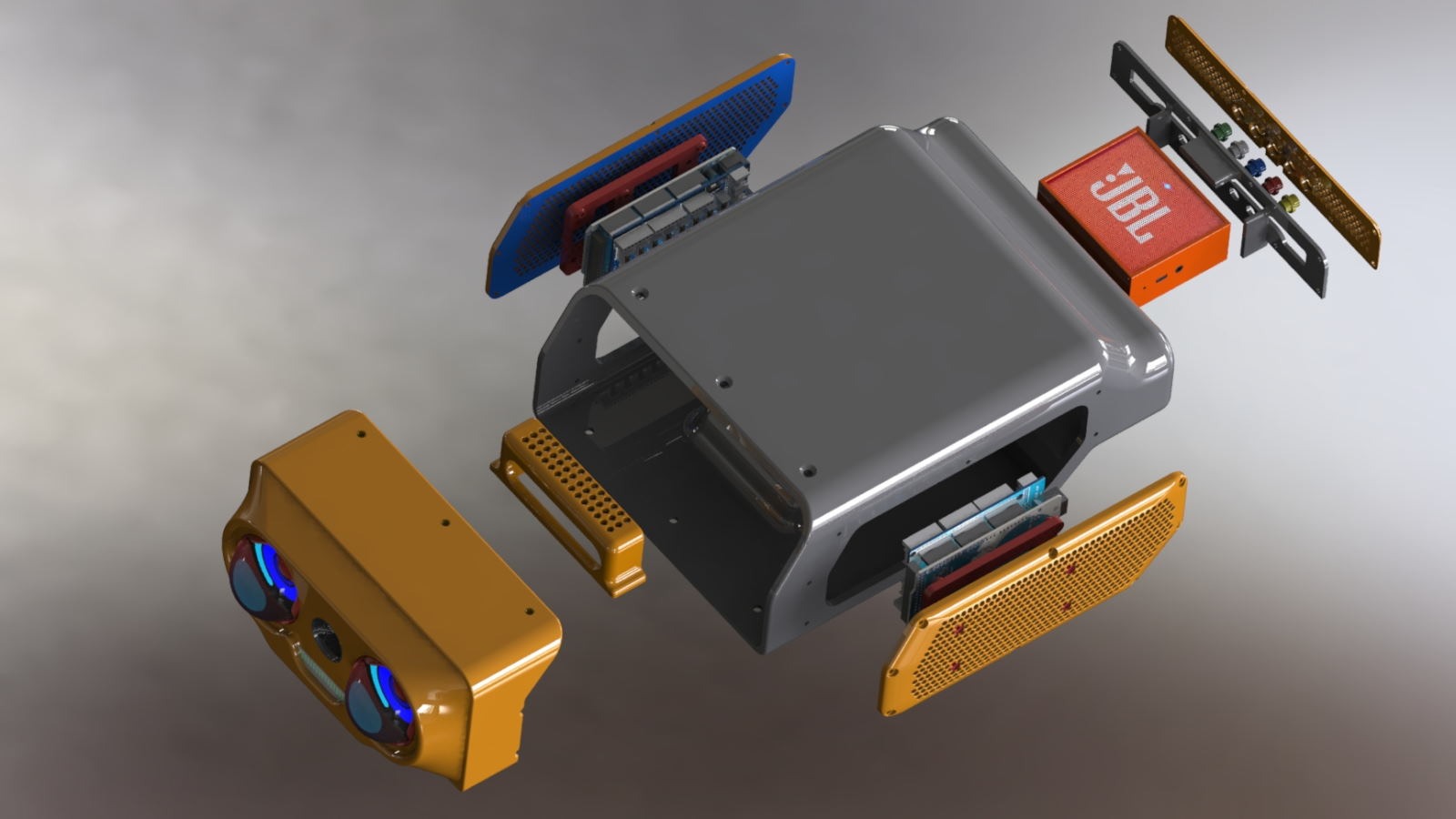
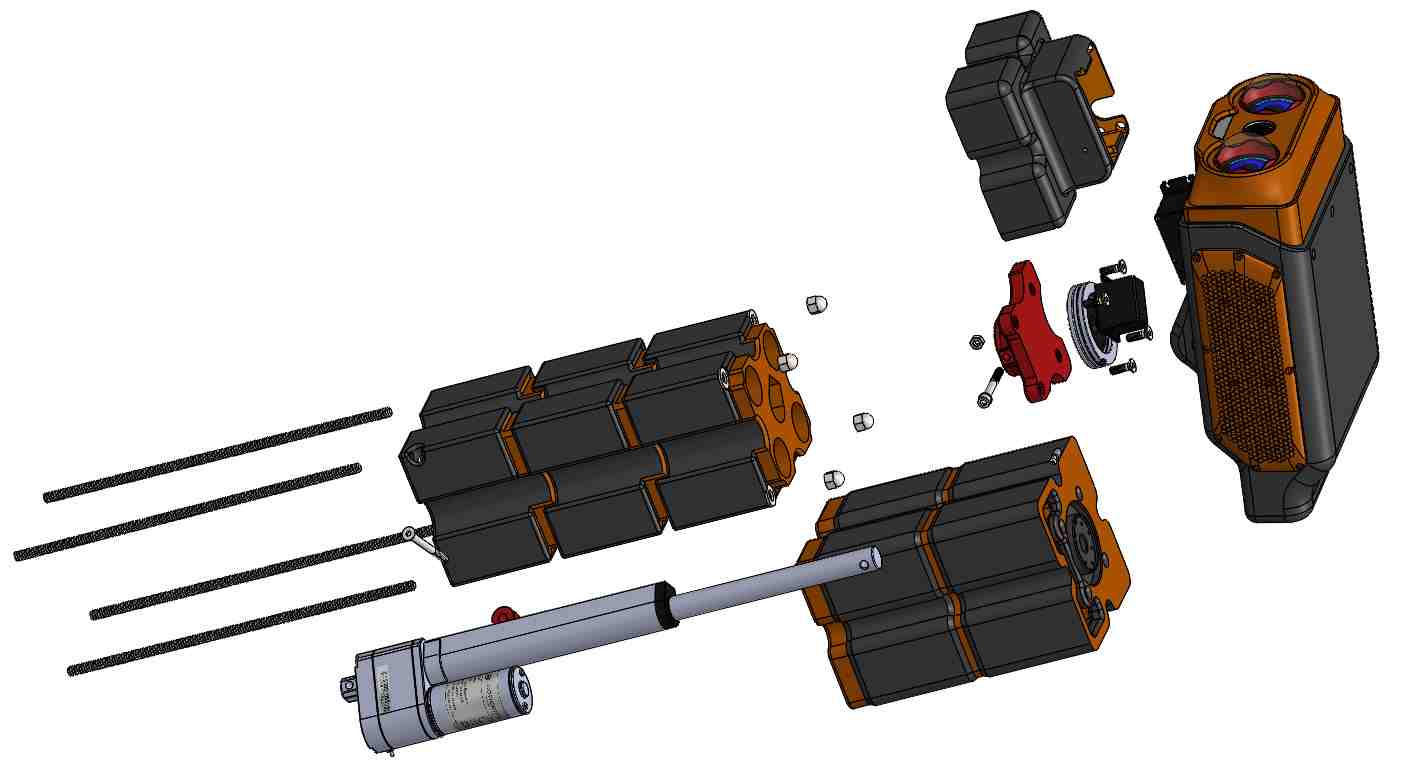
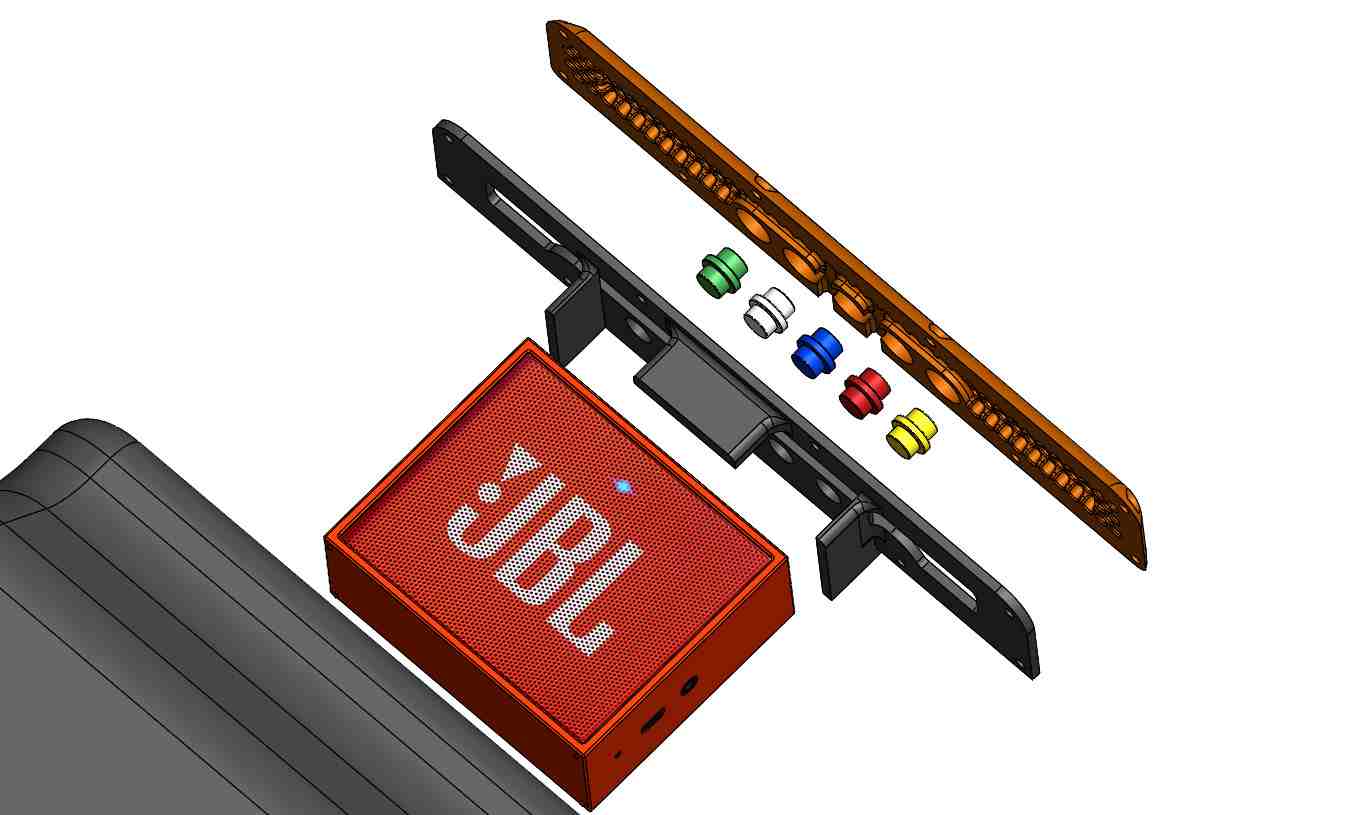
Nestor -> Eclatée de la tete de Nestor version du 26-07-2018 – 002
Voici un éclaté complet de la tête de Nestor. On peut remarquer que de chaque côté de la tête, nous avons des grilles d’aération , mais elles servent surtout à propager le son de la petite enceinte qui est là pour restituer la voix de Nestor. Cette enceinte se trouve à l’arrière de la boîte crânienne ceci afin de répartir le poids pour éviter une fatigue importante du servomoteur d’élévation de la tête. Pour avoir accès aux différentes commandes de l’enceinte ,nous avons créé un petit panneau avec cinq boutons. Sur ces mêmes grilles d’aération que nous avions évoqué au début du paragraphe un support de carte est présent sur chacune des grilles afin d’accueillir un Arduino méga pour l’œil droit ou de l’œil gauche ainsi que pour le fonctionnement de la bouche.
–
–
Retour au sommaire
![]()
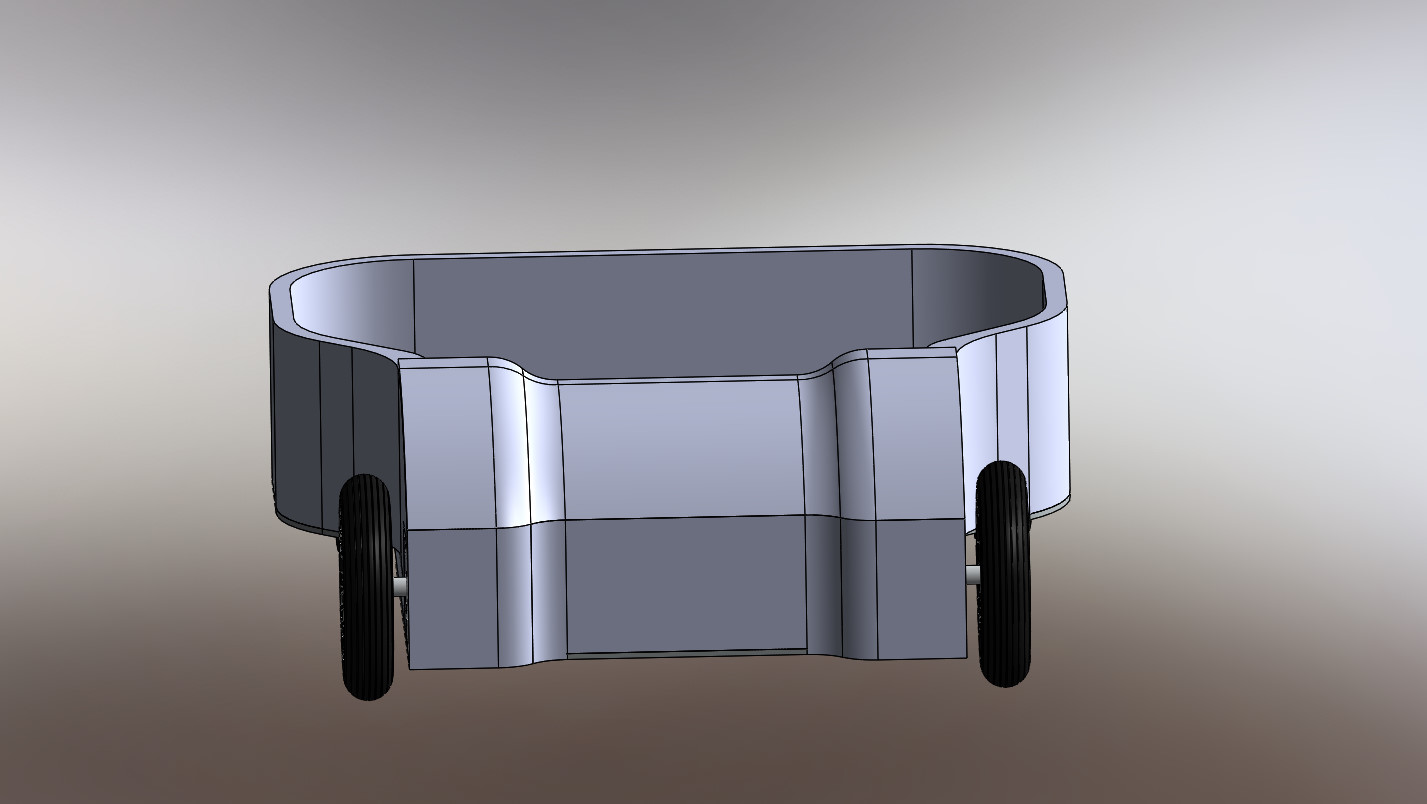
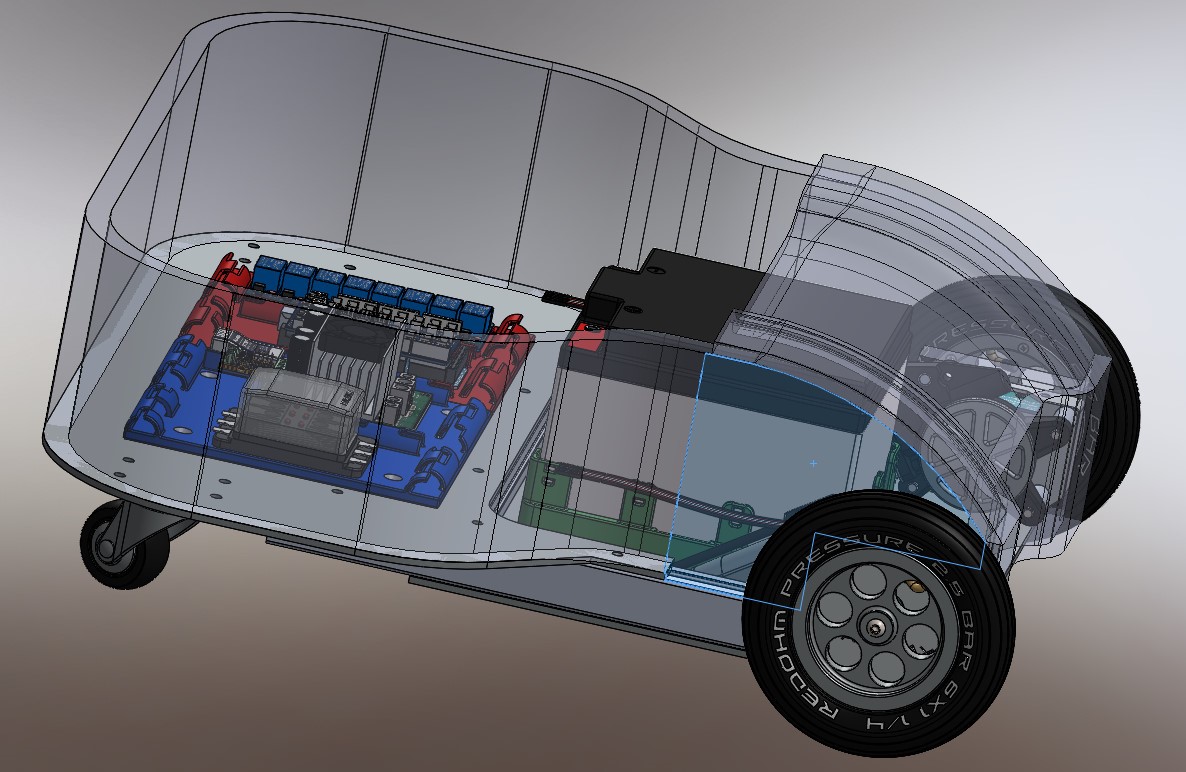
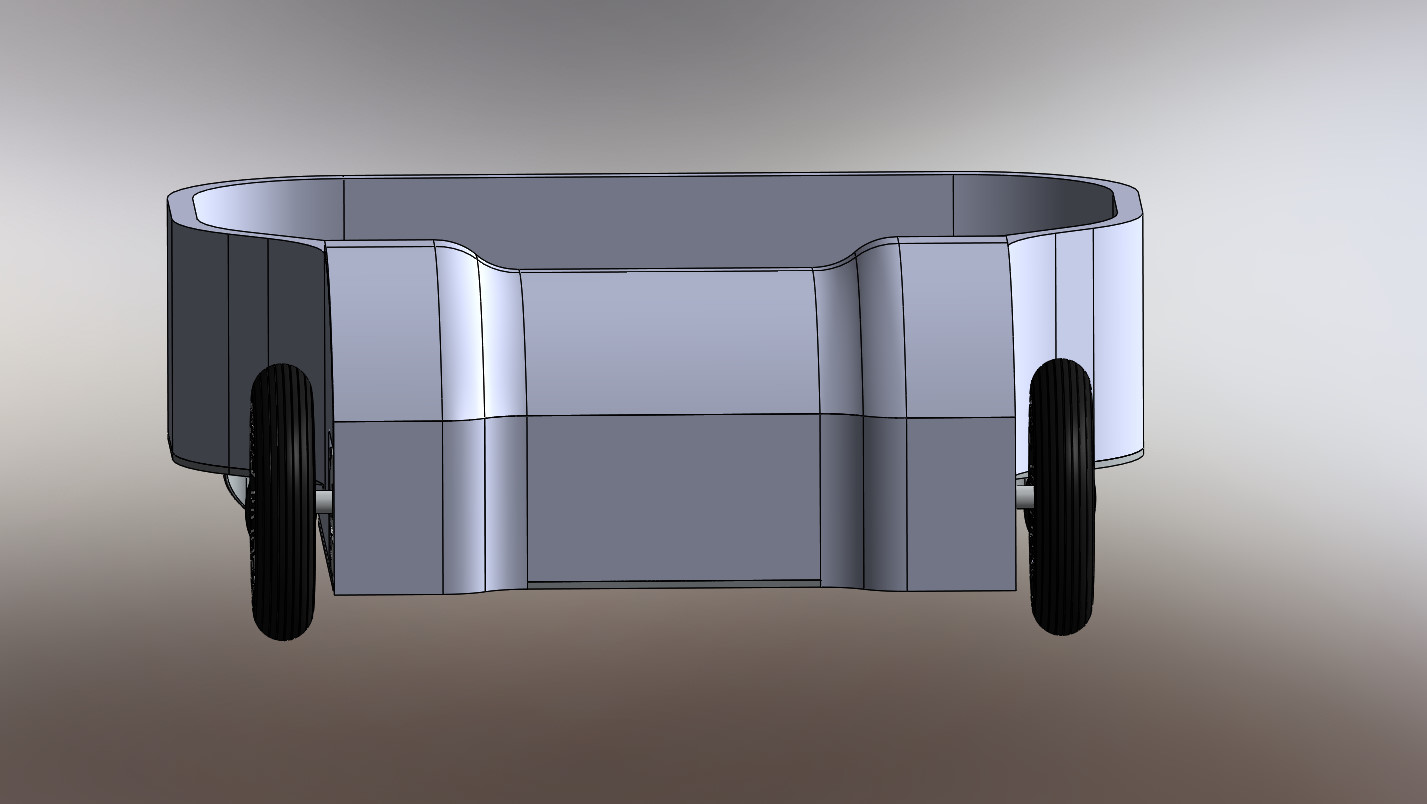
23/09/2018 : Etude du nouveau châssis du robot Nestor |
Suite aux différents essais que nous avons pu accomplir avec l’ancien châssis, nous sommes vite arrivés à la conclusion que nous étions limités en vitesse et en charge. Nous nous sommes donc fixés de nouvelles limites pour que notre robot puisse se déplacer dans de meilleures conditions. Nous avons porté notre dévolu sur un groupe moto réducteur de chez Parallax. Celui-ci répond bien mieux à notre nouveau cahier des charges puisque ce type de matériel est capable de déplacer 27 kg. Bien que cela soit beaucoup plus important, il nous faudra quand même faire des efforts pour gagner du poids.
Plus d’information sur le groupe moto-réducteur Parallax réference 28962
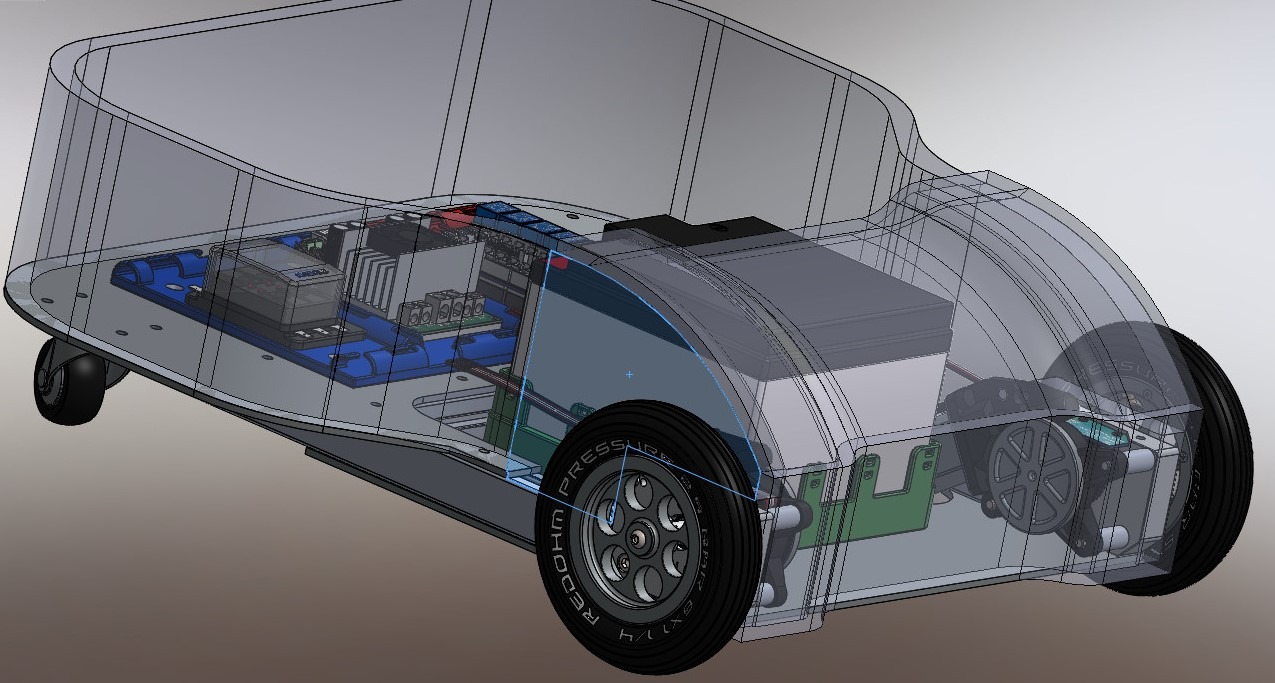
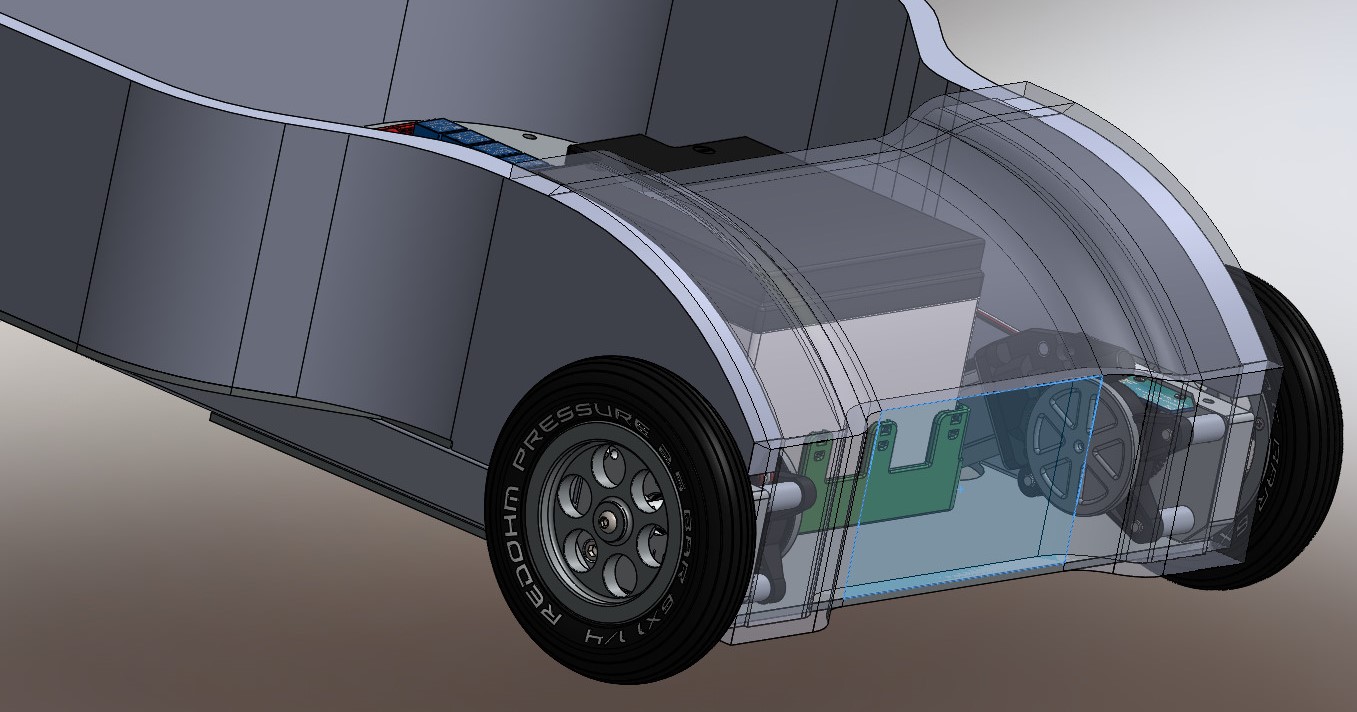
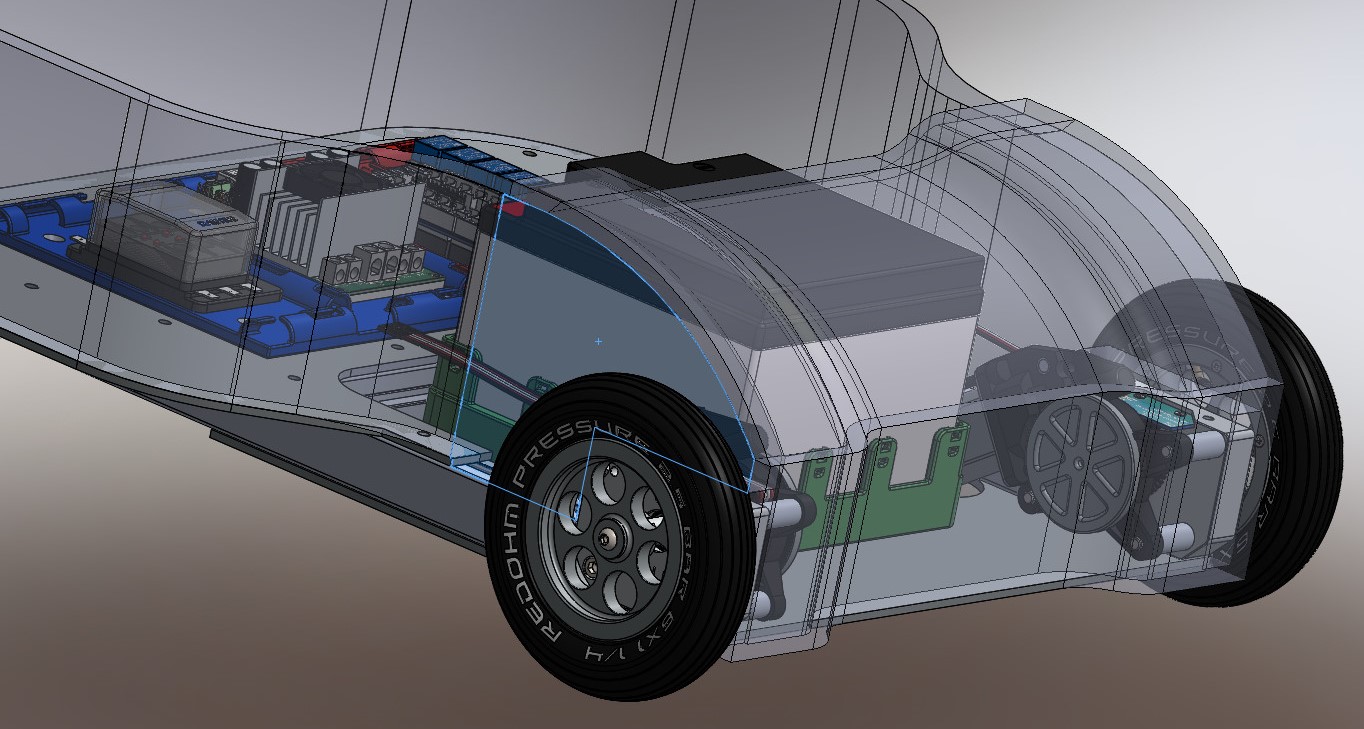
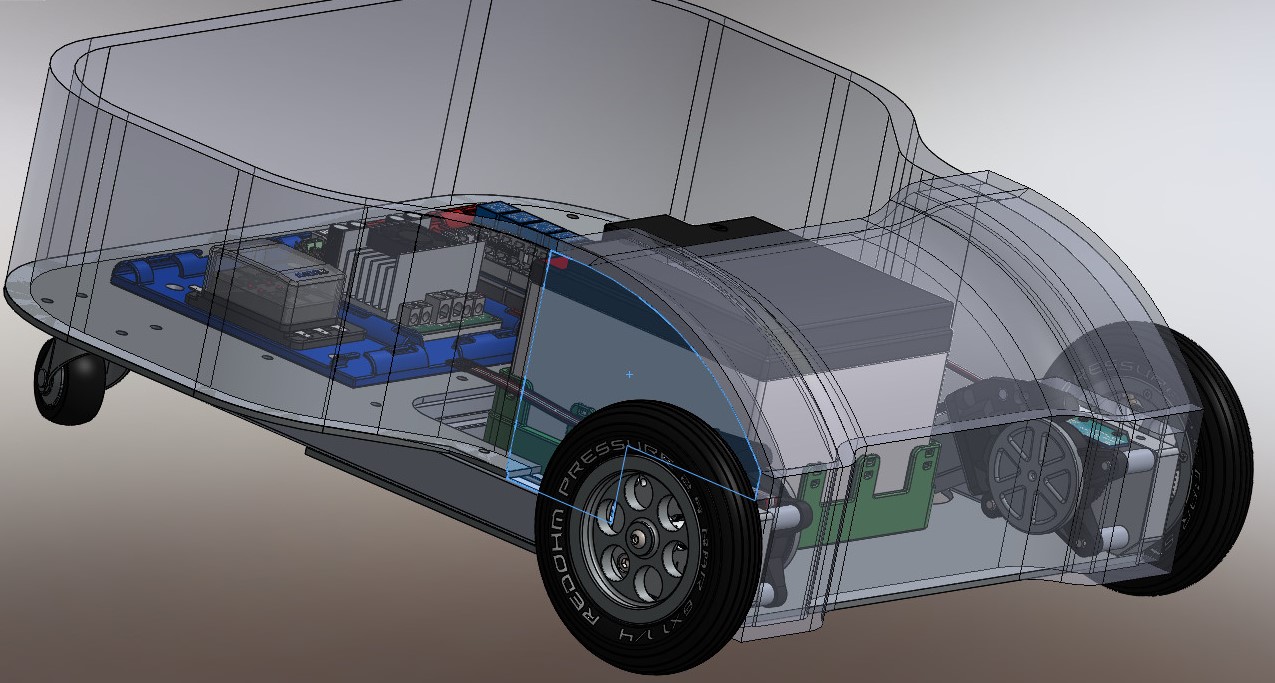
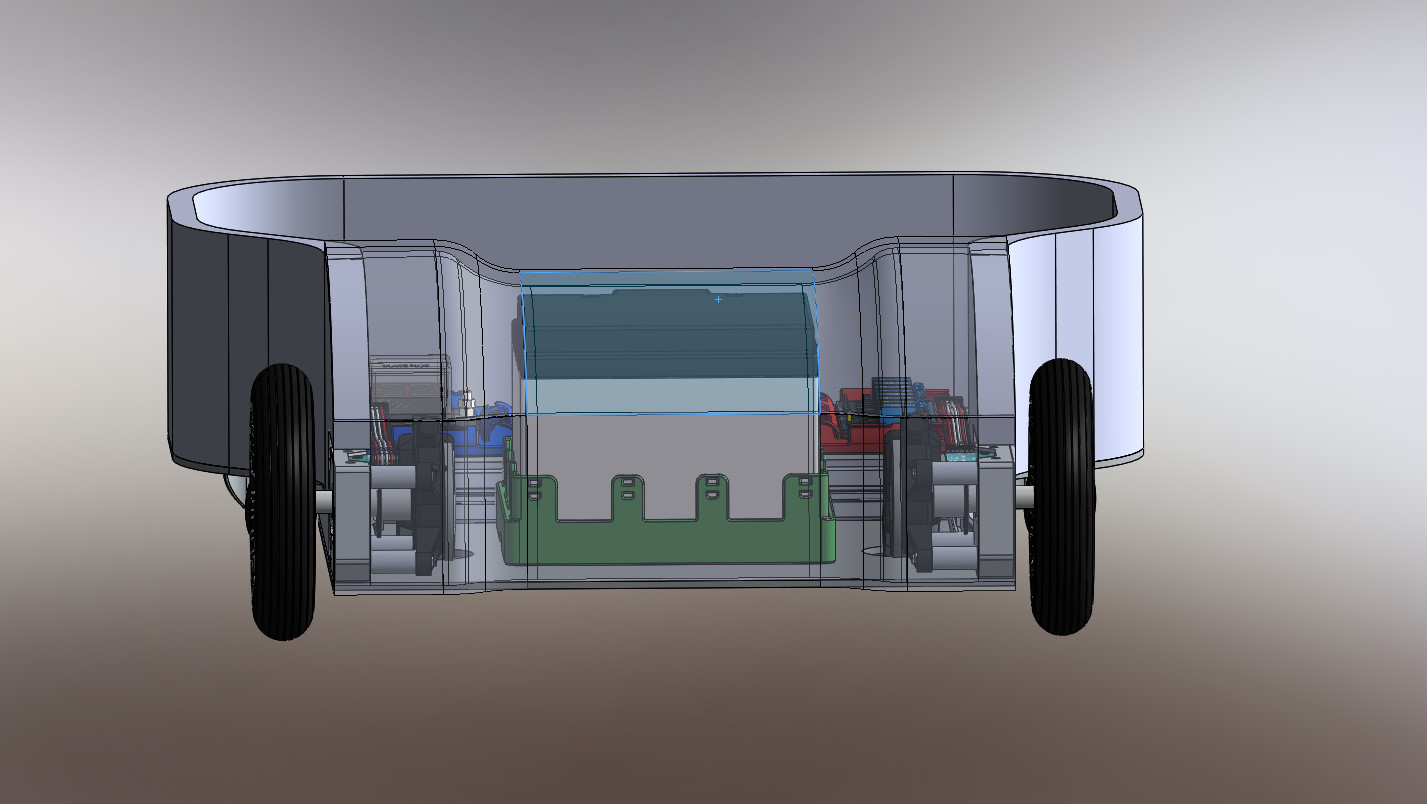
Il faut savoir que pour le moment, l’alimentation électrique est fournie par une batterie plomb qui est relativement lourde.Il est prévu ultérieurement de la remplacer par un autre type de batterie qui nous permettrait de gagner de façon significative plusieurs kilos (exemple batteries au lithium 12 V mais évidemment ce type de matériel est beaucoup plus onéreux) un petit point sur le reste du matériel.
Nouveau châssis pour le robot Nestor
-
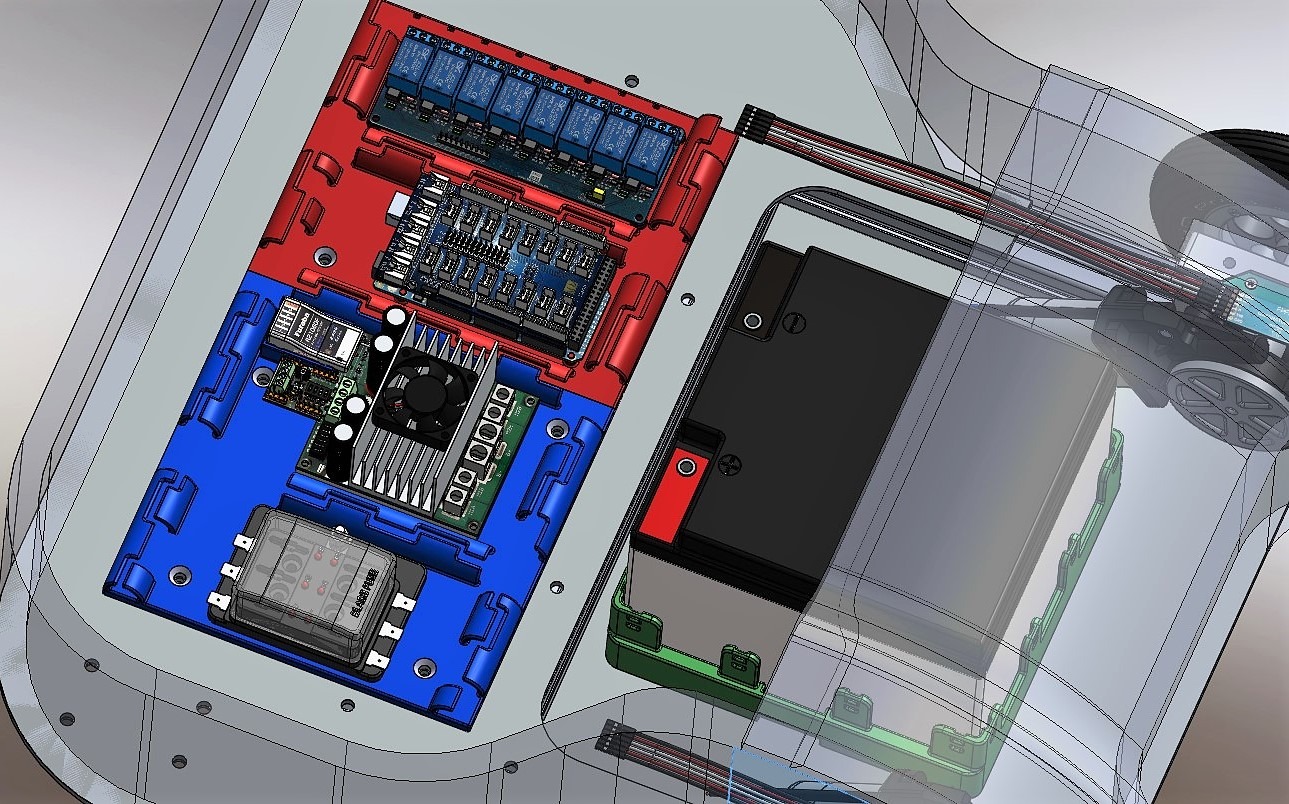
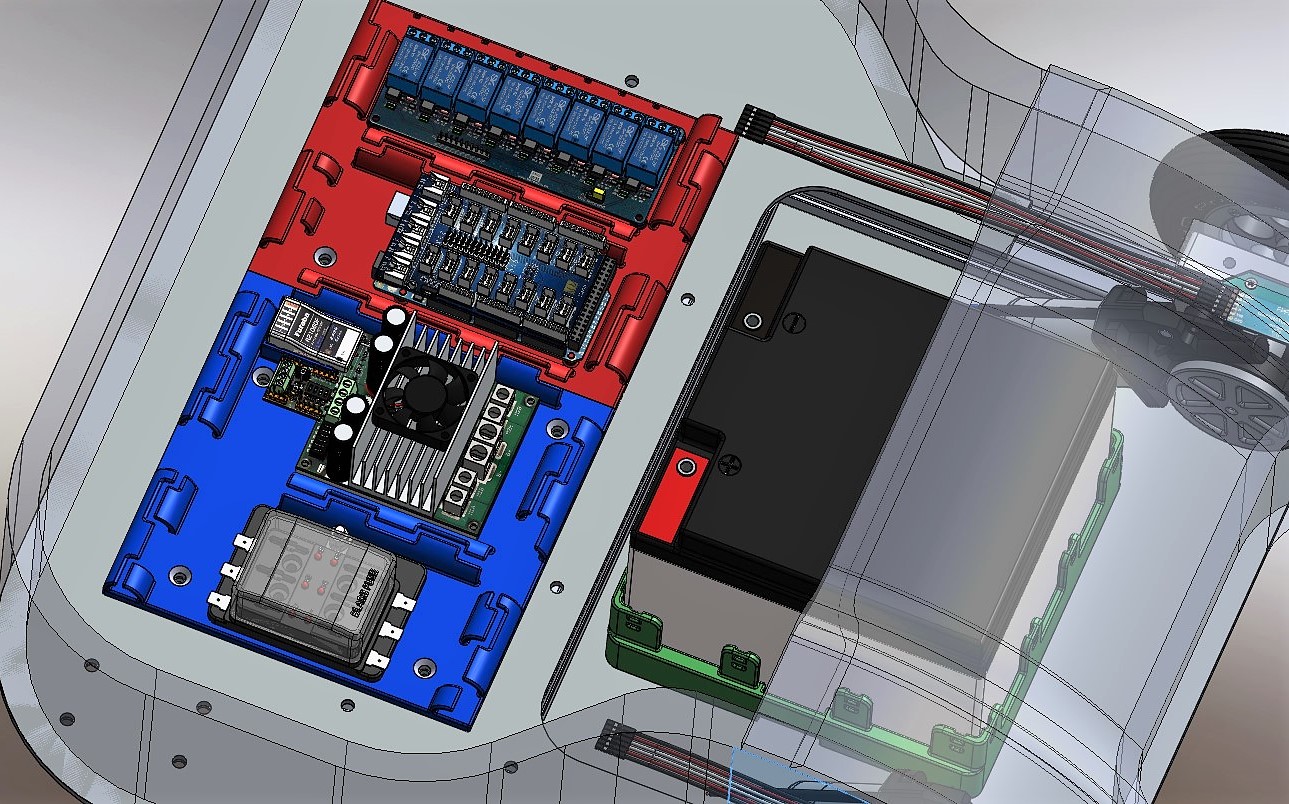
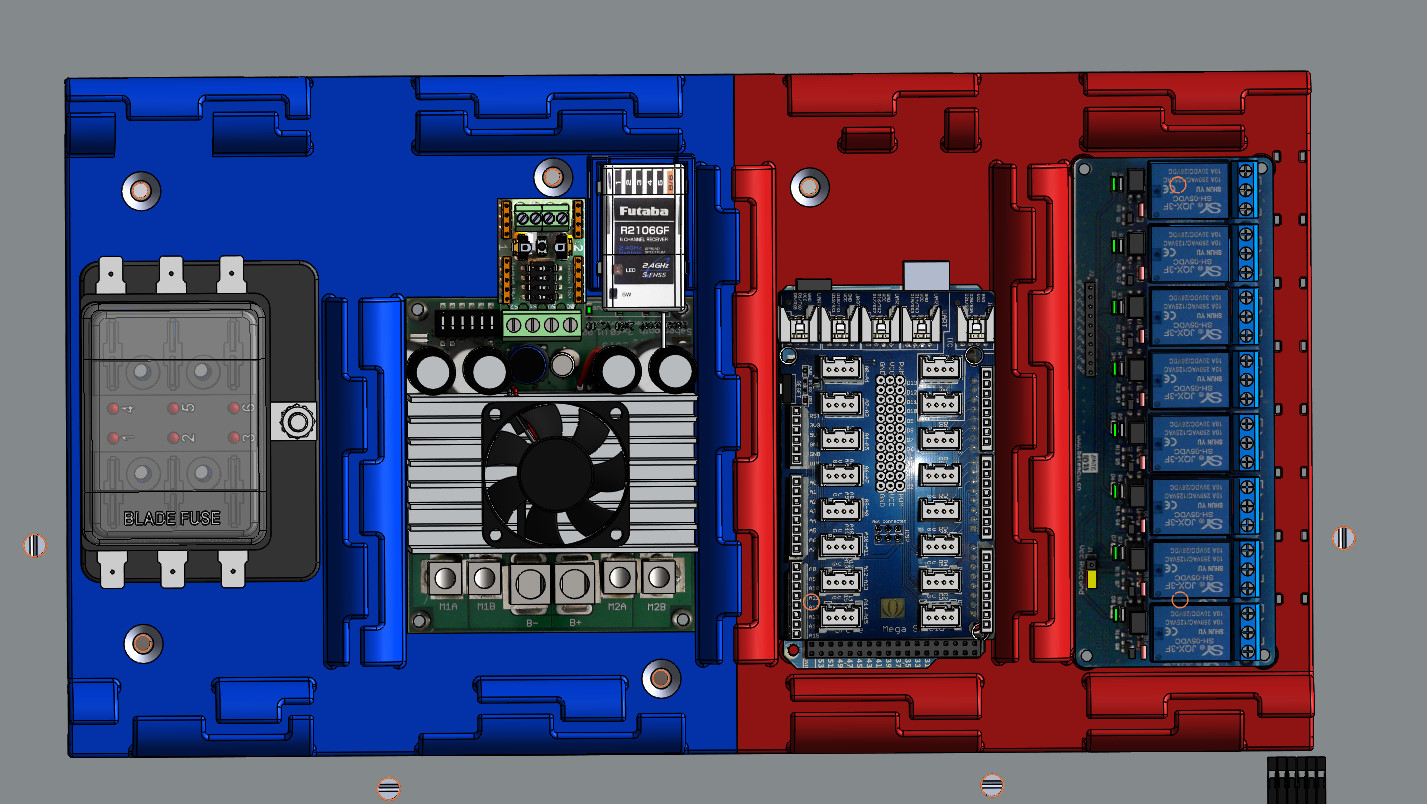
- Nous avons choisi pour la variation de vitesse une carte SaberTooth 2x60A qui est largement surdimensionnée pour pouvoir fonctionner dans un endroit clos et sans ventilation.
-
- Pour le système de contrôle de la plate-forme qui va englober la sécurité et les différents détecteurs de proximité, nous avons choisi une Arduino Mega surmonté d’une carte méga Grove.
-
- Sur le côté du package électronique, vous pourrez distinguer une carte de huit relais qui nous permettra de piloter les différents accessoires.
-
- On peut distinguer devant le variateur une petite carte, c’est un module Kangaroo x2 qui permet de raccorder des encodeurs et des fins de course aux commandes. Il accepte jusqu’à 2 encodeurs à quadrature ou potentiomètres et se fixe directement sur le bornier du Sabertooth.Le grand avantage de ce module est qu’il est auto-réglable, il suffit de presser quelques boutons et régler un commutateur dip-switch. Le Kangaroo x2 fonctionne avec des sources analogiques ou RC mais aussi avec des microcontrôleurs ou ordinateurs.
- Et enfin , vous pouvez distinguer un support 6 fusibles pour protéger l’ensemble de la plate-forme.
-
- La structure principale a été réalisée avec du profilé aluminium Bosch Rexroth , recouvert d’une feuille d’aluminium de 4 mm.
- La construction de la carrosserie sera réalisée en impression 3D avec du filament de chez Arianeplast.
Diaporama sur l’étude du châssis attendez 5 secondes
–
Retour au sommaire
![]()
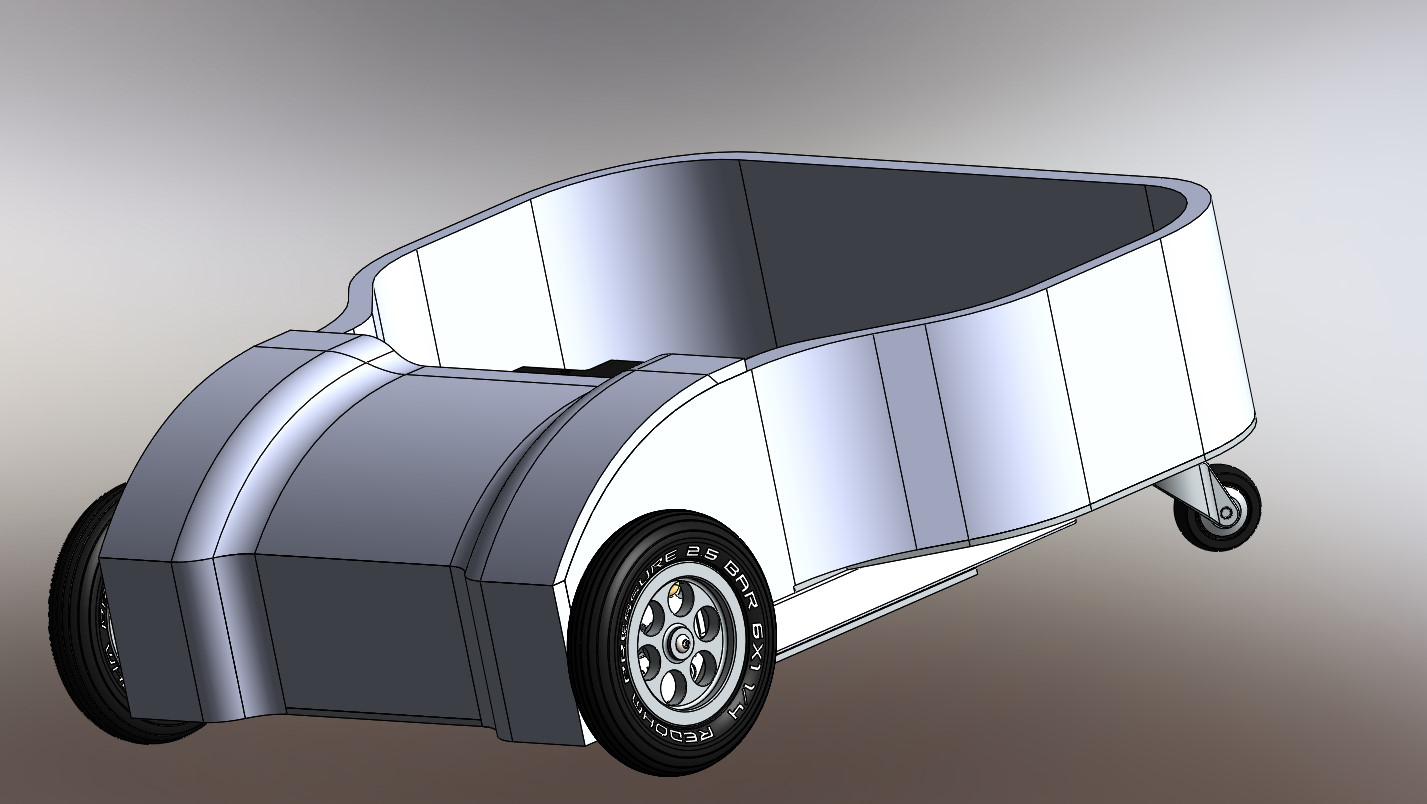
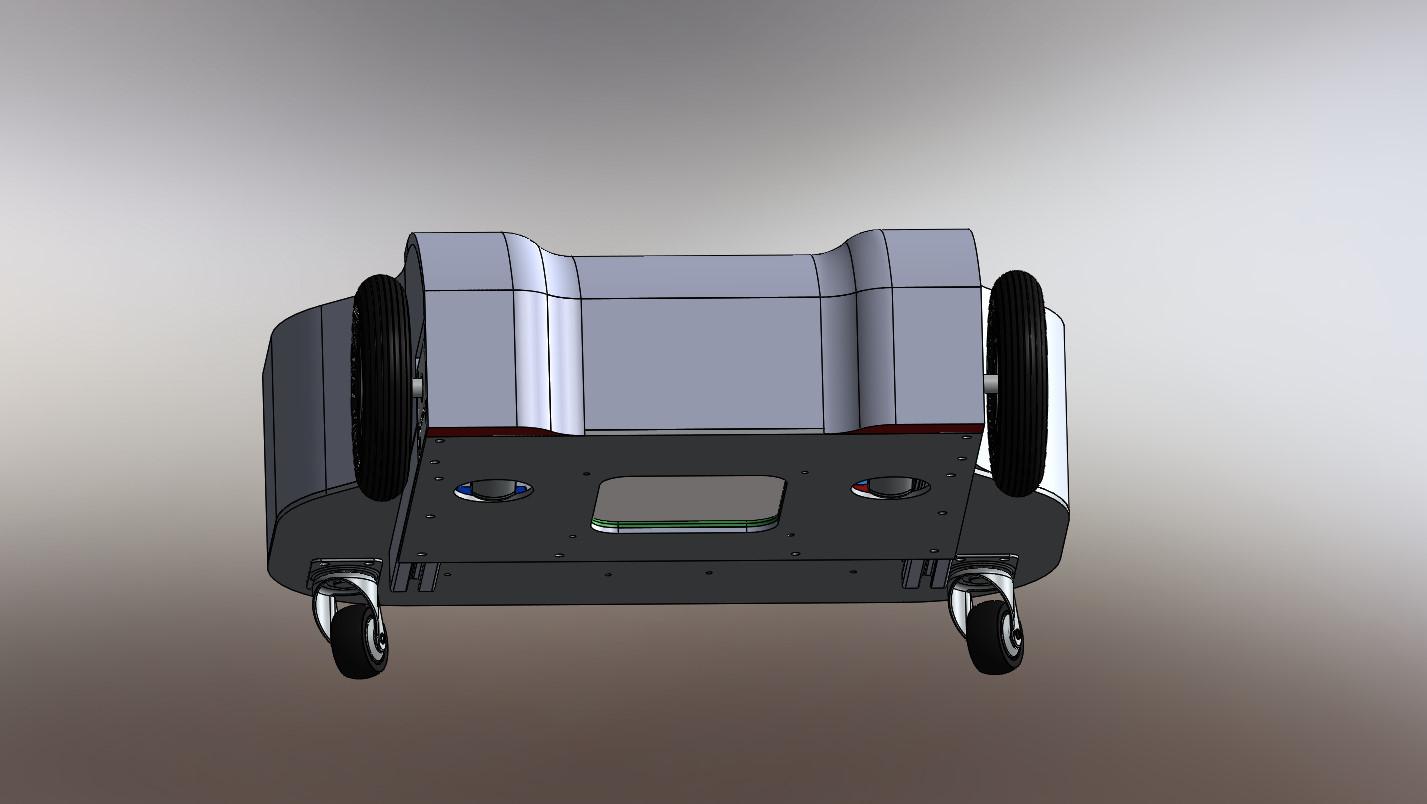
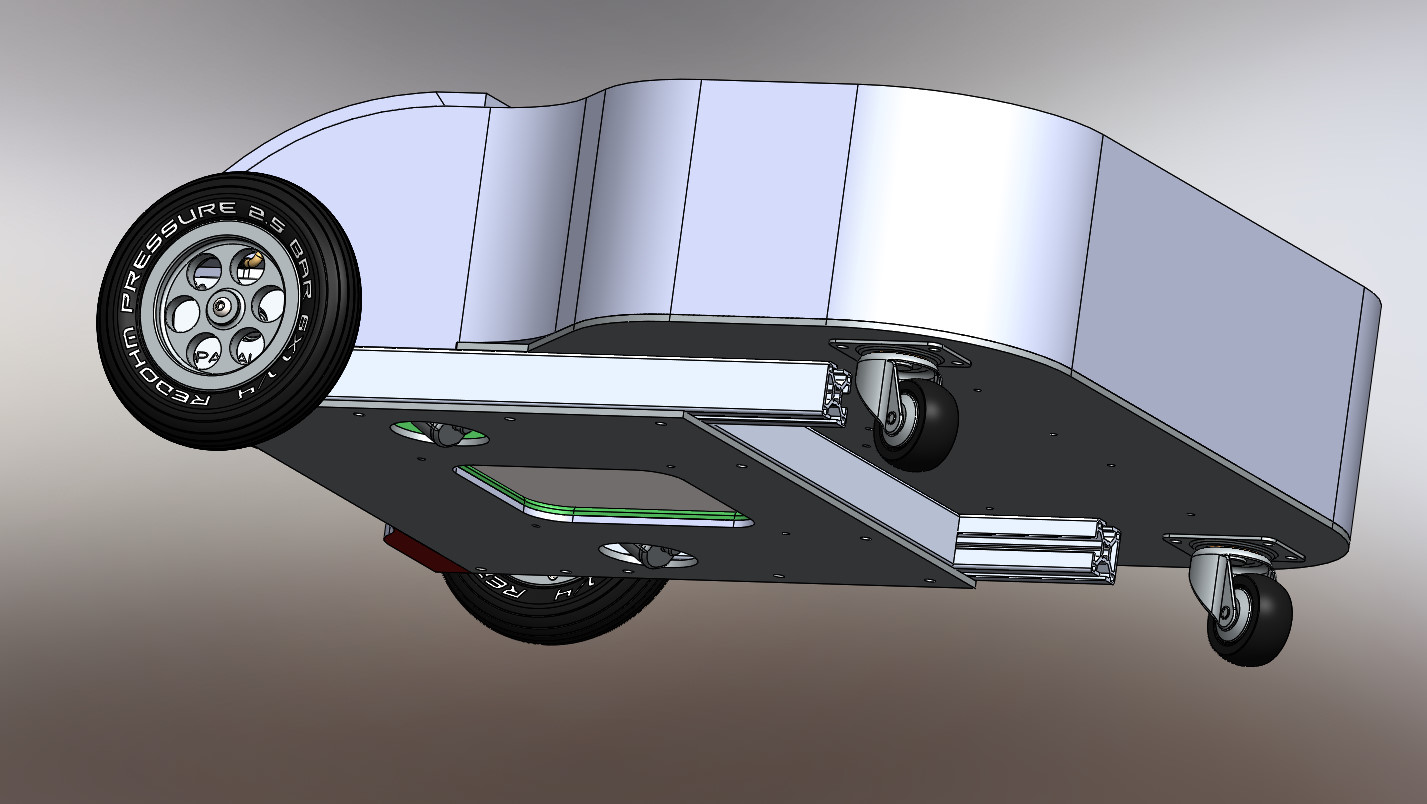
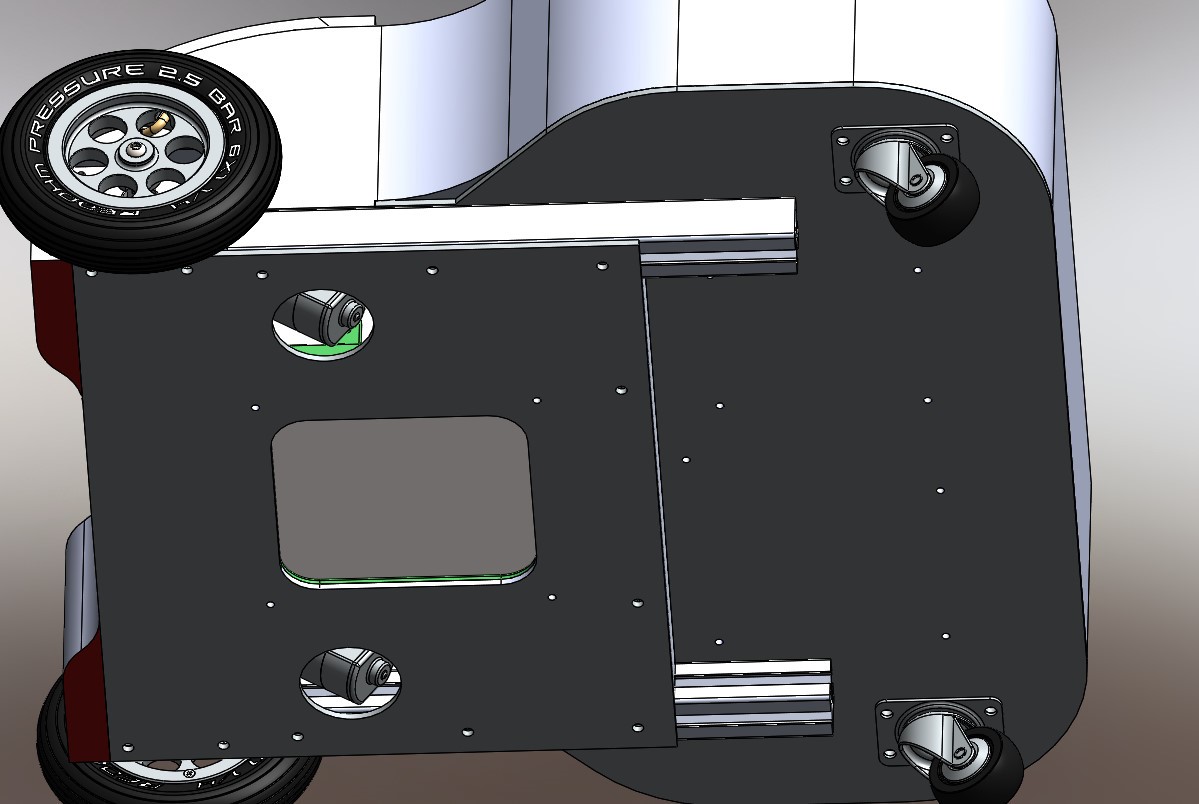
04/11/2018 : Etat d’avancement du châssis de Nestor |

Robot Nestor . Le chassis
Nous continuons à travailler sur la carrosserie du châssis de Nestor. Vous pourrez remarquer, sur cette photo, le soin accordé sur l’ensemble du châssis. À l’avant du châssis, vous remarquerez les capteurs ultrasoniques pour la détection de trous, les capteurs pour les détections d’obstacles et sur le côté ,une prise USB qui vous donne la possibilité de programmer la carte arduino de l’extérieur.Sur les deux côtés arrière, le châssis possède encore 2 capteurs ultrasonique pour la détection de trous ou de marches d’escalier. Sur le côté droit du châssis ,il y a un interrupteur coupe batterie.Et enfin à l’avant du chassis un phare pour le deplacement de nuit .
Retour au sommaire
![]()
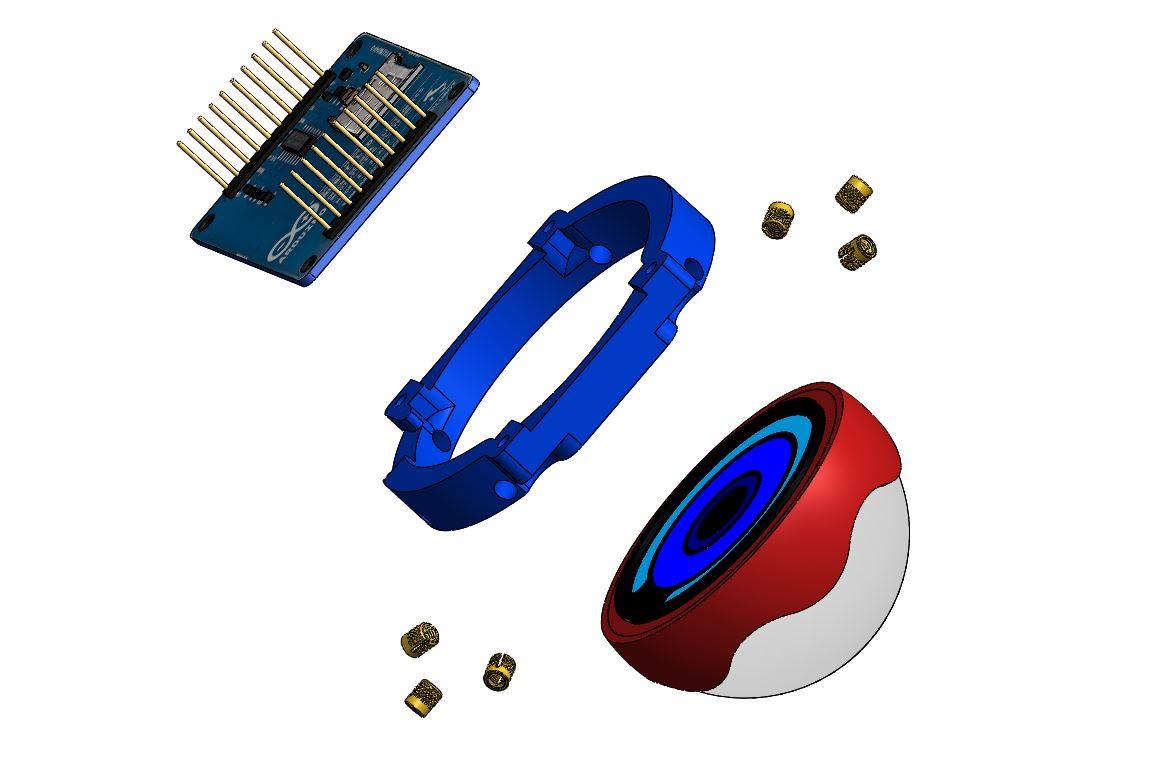
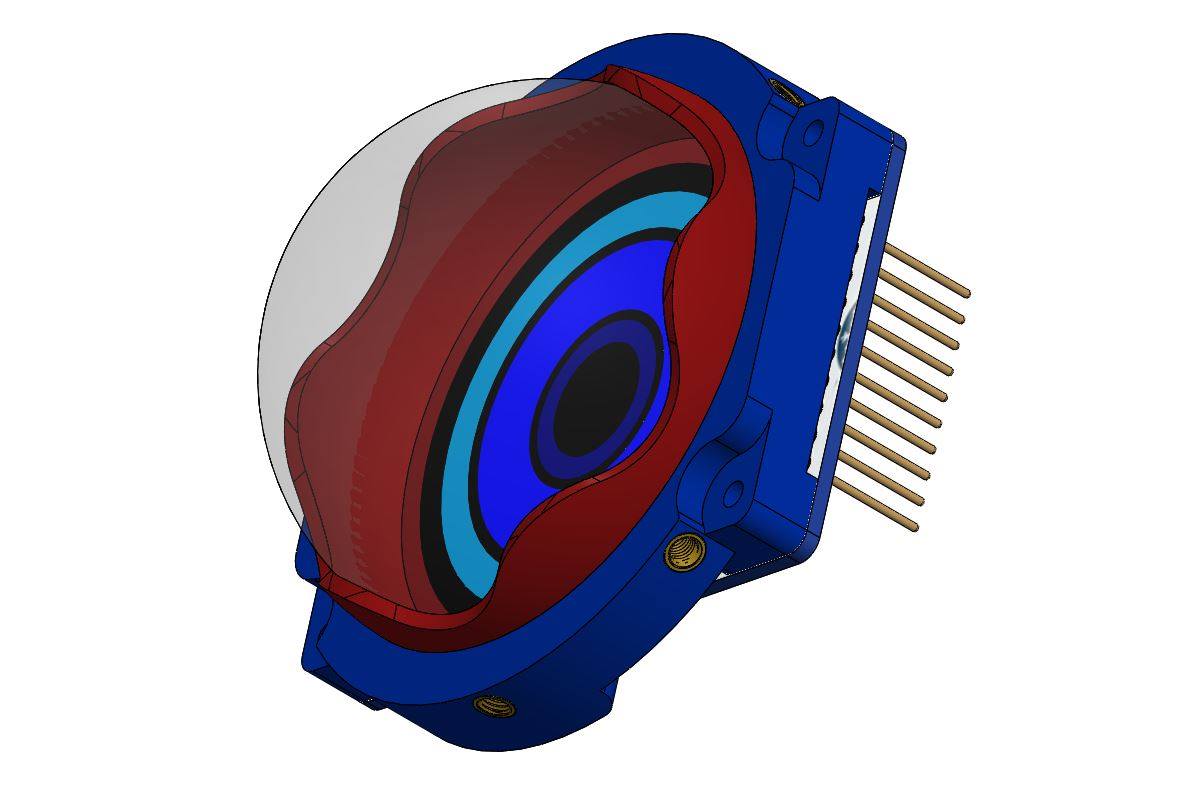
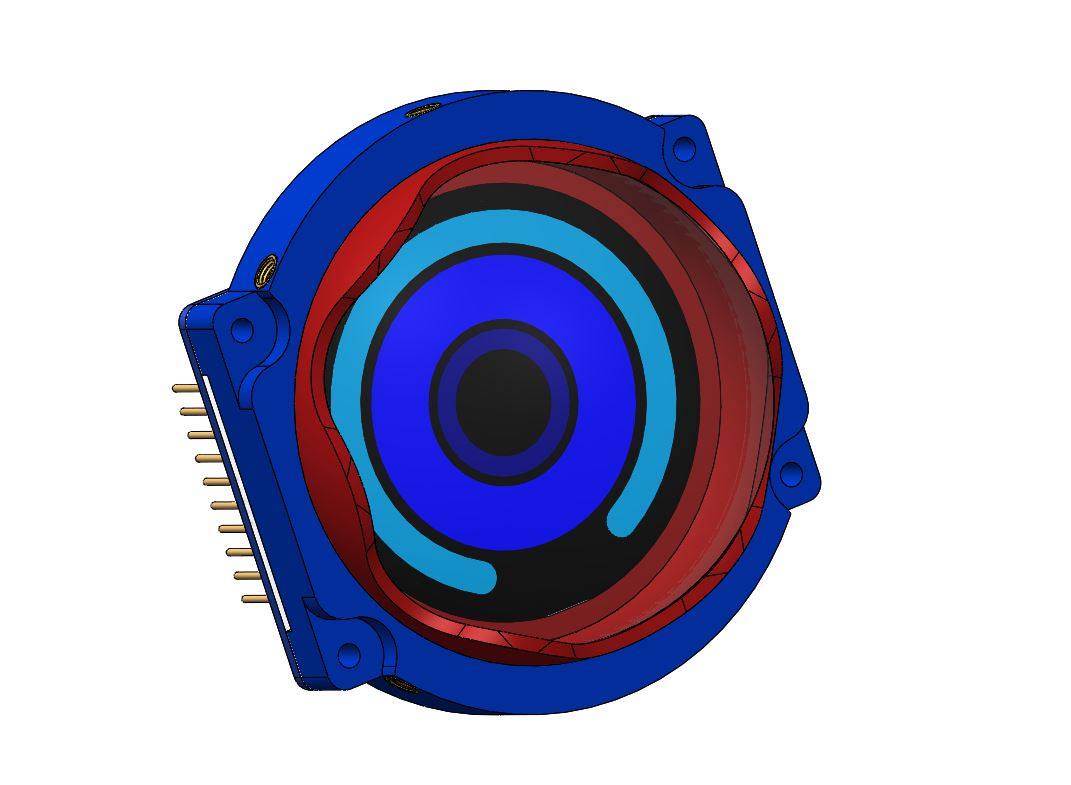
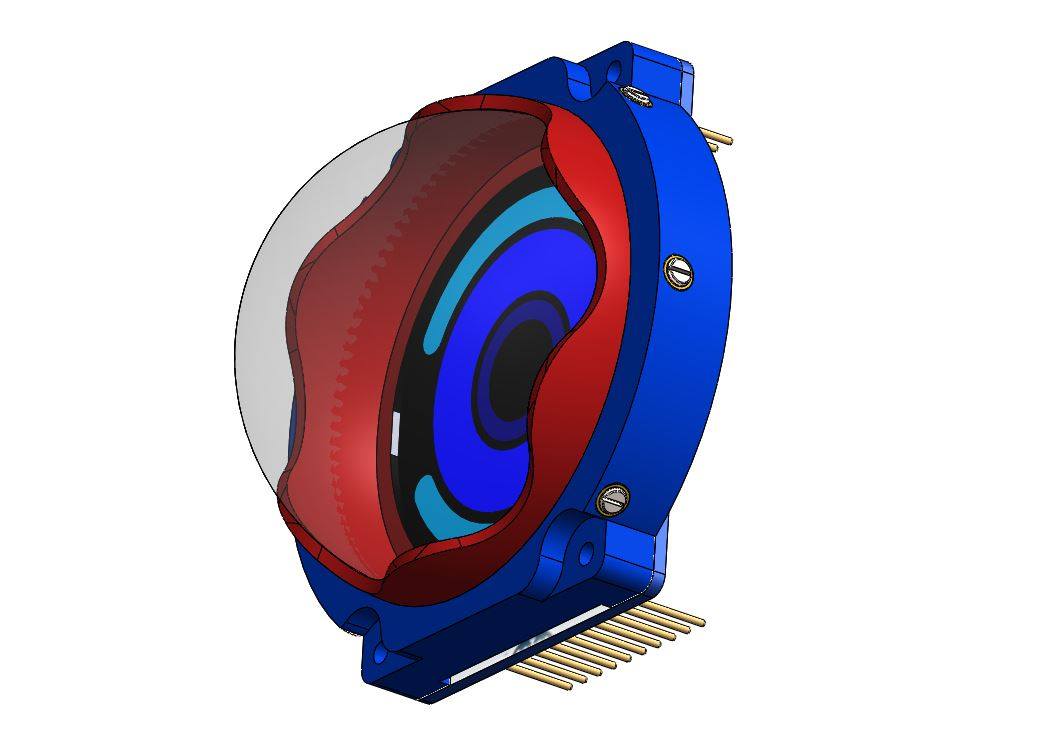
13/01/2019 : upgrade du robot Nestor |

Robot Nestor avec le capteur de mouvement
Afin d’humaniser un peu plus notre robot Nestor nous avons décidé d’insérer dans la boîte crânienne un capteur de mouvement. Celui-ci n’est pas affecté par des influences ambiantes telles que la lumière ou le son qui pourrait avoir un impact négatif en fonction de son environnement. Non, là, il s’agit d’un capteur qui génère un champ électromagnétique et dont la modification de ce champ peut s’opérer simplement en rentrant dans le périmètre du détecteur simplement avec la main. Ce capteur dialoguera en I2c via une carte Arduino Mega se trouvant déjà dans la tête du robot. Nous pourrons donc détecter d’éventuelles caresses ou bien d’éventuel message que l’on pourra lui indiquer simplement par gestes.
.
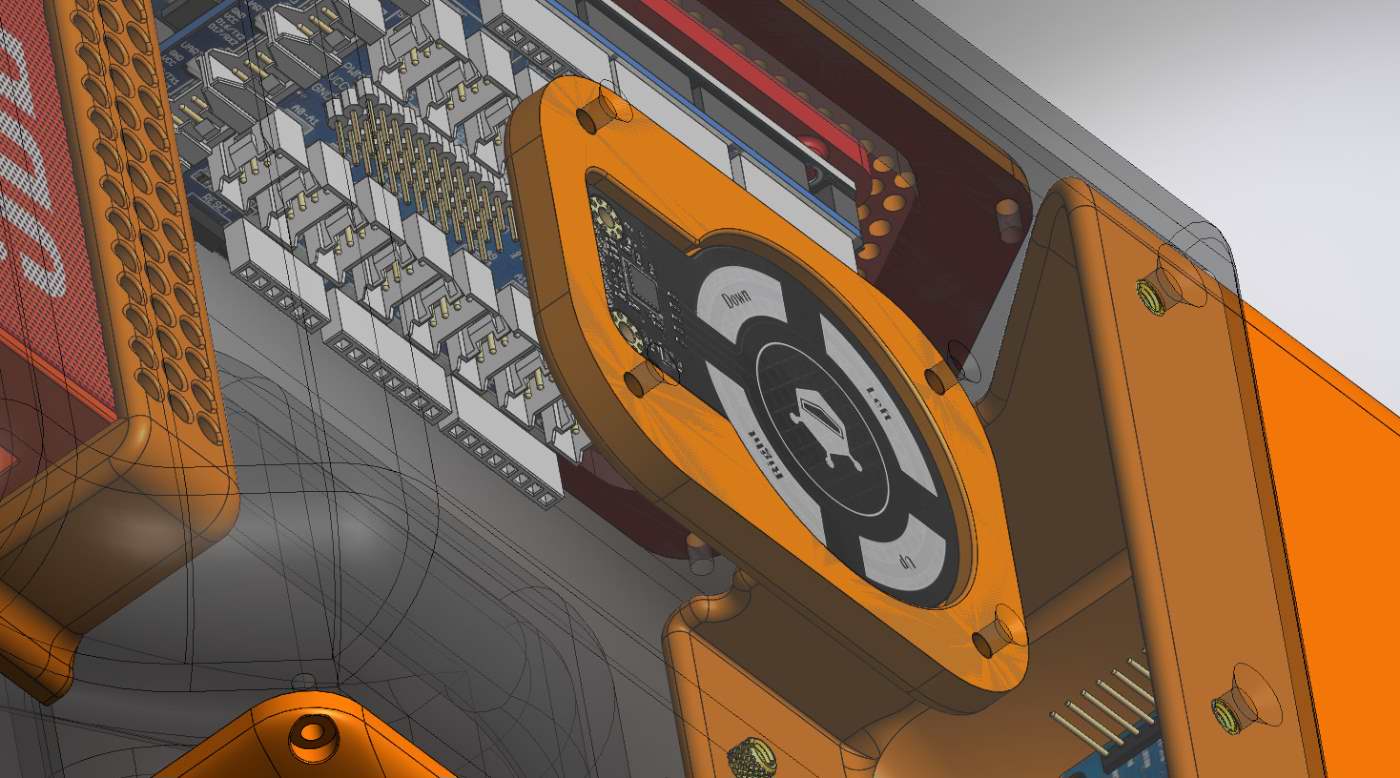
Robot Nestor avec le capteur de mouvement 01
Voici le lien pour la documentation du capteur -> Capteur Sen0202
La video du tutoriel
Retour au sommaire