
Bienvenue sur notre page dédiée aux Moteurs Brushless !
Ici, vous trouverez tout ce que vous devez savoir pour maîtriser les moteurs brushless et les systèmes de contrôle qui les accompagnent. Que vous soyez débutant ou expert, notre contenu s’adapte à tous les niveaux.
Sommaire :
- Principes et Schémas : Découverte du Moteur Brushless et du Contrôleur BLD-300B
- Pilotage d’un Moteur Brushless via Arduino : Utilisation du Contrôleur BLD-300B
- PWM et Rampes d’Accélération : Votre Moteur Brushless sous Contrôle
- Questions concernant les moteurs brushless
- Les moteurs brushless nécessitent-ils systématiquement l’utilisation de capteurs à effet Hall ?
- Quelles sont les limitations des capteurs à effet Hall lorsqu’ils sont utilisés dans les moteurs brushless ?
- Les encodeurs optiques peuvent-ils remplacer les capteurs Hall pour plus de précision dans les moteurs brushless ?
- Retour au menu vidéo.
🛠 Tutoriels Complets
Découvrez nos tutoriels pas à pas pour comprendre le fonctionnement des moteurs brushless, comment les choisir et comment les installer. Apprenez également à les configurer avec les contrôleurs appropriés pour des performances optimales.
🔌 Plans de Câblage
Nos guides de câblage détaillés vous aideront à connecter votre moteur brushless en toute sécurité. Que ce soit pour une simple mise en route ou un projet plus complexe, vous trouverez ici toutes les informations nécessaires.
📚 Codes et Scripts
Nous mettons à votre disposition une sélection de scripts déjà conçus pour Arduino et divers microcontrôleurs, afin de faciliter votre initiation. Nos programmes sont conçus pour gérer depuis la simple gestion de la vitesse jusqu’aux fonctionnalités les plus complexes, répondant ainsi à une multitude de besoins pratiques.
– Questions concernant les moteurs brushless –
Les moteurs brushless nécessitent-ils systématiquement l’utilisation de capteurs à effet Hall ?
Non, les moteurs brushless n’exigent pas obligatoirement des capteurs à effet Hall. Il y a des moteurs brushless dits ‘sensorless’ ou sans capteur, qui fonctionnent sans ces derniers. Bien que les capteurs à effet Hall soient couramment employés pour un contrôle de la position du rotor plus précis, d’autres méthodes peuvent également être utilisées pour estimer cette position.
Dans les moteurs brushless, ou « sans balais », le contrôle de la rotation du rotor est généralement réalisé en alimentant séquentiellement les bobinages du stator. Cette séquence d’alimentation génère un champ magnétique qui entraîne la rotation du rotor.
Pour les moteurs brushless dits « sensorless » (sans capteurs), le processus de démarrage est un peu différent. Le contrôleur initie la rotation en envoyant une petite quantité de courant dans les bobinages du stator. Cela sert à initier le mouvement du rotor sans risquer d’endommager les bobinages, surtout si le stator et le rotor ne sont pas correctement alignés au départ.
Une fois que le rotor commence à se déplacer, le contrôleur peut estimer sa position sans avoir besoin de capteurs. Cela est possible grâce au phénomène de « contre-électromotrice » ou « back EMF ». Dans ce contexte, les aimants permanents du rotor génèrent des courants induits lorsqu’ils passent devant des bobinages non alimentés du stator. Le contrôleur utilise ces courants induits pour déterminer la position du rotor.
Grâce à cette estimation, le contrôleur peut ensuite ajuster l’alimentation des bobinages du stator pour maximiser l’efficacité et la puissance du moteur. En somme, le système « sensorless » permet de contrôler la rotation du moteur brushless sans avoir besoin de capteurs supplémentaires, tout en étant capable d’optimiser la performance du moteur une fois en mouvement.
Quelles sont les limitations des capteurs à effet Hall lorsqu’ils sont utilisés dans les moteurs brushless ?
Précision de positionnement : Les capteurs à effet Hall ne fournissent qu’une résolution de position limitée. Dans les applications nécessitant une très haute précision de positionnement.
Fragilité aux interférences électromagnétiques : Les signaux de faible puissance des capteurs Hall peuvent être perturbés par des interférences électromagnétiques (EMI) de l’environnement, ce qui peut fausser les lectures de position.
Température : Les performances des capteurs à effet Hall peuvent se dégrader à des températures extrêmes. Ils doivent être conçus pour résister aux conditions opérationnelles spécifiques du moteur.
Temps de réponse : Le temps de réponse des capteurs Hall peut être insuffisant pour des vitesses de rotation très élevées, ce qui peut entraîner des erreurs dans la synchronisation de la commutation.
Coût et encombrement : Les capteurs Hall ajoutent un coût supplémentaire au système de moteur et nécessitent un espace physique pour l’intégration, ce qui peut être un inconvénient dans des conceptions très compactes.
Les encodeurs optiques peuvent-ils remplacer les capteurs Hall pour plus de précision dans les moteurs brushless ?
Oui, les encodeurs optiques peuvent être un remède aux limitations des capteurs à effet Hall dans certaines applications de moteurs brushless, en particulier dans les cas où une plus grande précision de positionnement est requise.
✔️Voici quelques avantages :
Haute Résolution : Les encodeurs optiques offrent une résolution de position beaucoup plus élevée que les capteurs à effet Hall, ce qui est bénéfique pour des applications nécessitant un contrôle précis de la position du rotor.
Précision et Fiabilité : Ils sont généralement plus précis et fournissent des mesures de position fiables et répétables, ce qui est crucial pour les systèmes de contrôle en boucle fermée.
Faible Susceptibilité aux Interférences : Les encodeurs optiques, bien que sensibles à la lumière et à la saleté, sont moins affectés par les interférences électromagnétiques que les capteurs à effet Hall.
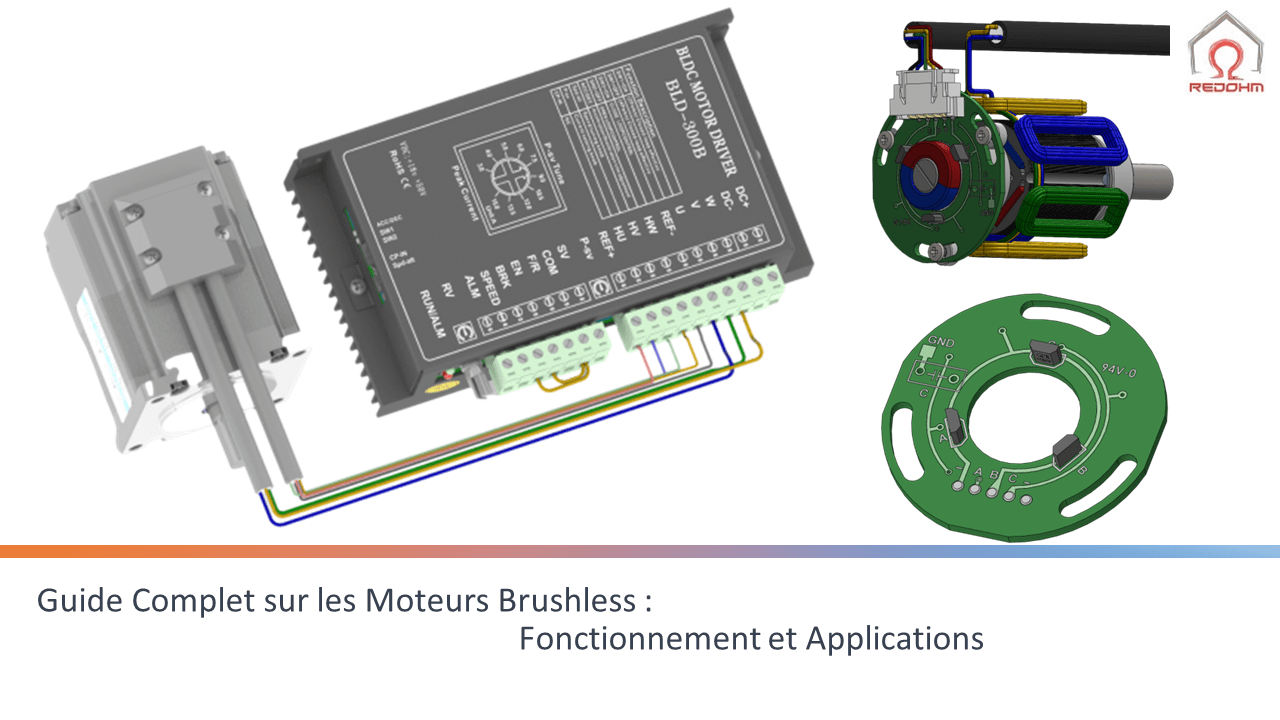
Principes et Schémas: Découverte du Moteur Brushless et de son Contrôleur BLD-300B |
.
Mise à jour : 29/10/2023
Plongez avec nous dans l’univers fascinant des moteurs brushless. Ces merveilles technologiques se distinguent par leur performance et longévité, jouant un rôle prépondérant dans les innovations actuelles.
Au programme :
🔧 Présentation détaillée du moteur 57BL69-230-03 et de son contrôleur BLD300-B.
🧲 Une incursion dans la technologie des capteurs à effet Hall, essentiels pour la détection de la position du rotor.
📑 Analyse du schéma de câblage, avec un focus sur les marquages et la nomenclature employés par les constructeurs.
🛠️ Zoom sur le rôle crucial de la carte Arduino dans l’interaction avec le contrôleur du moteur brushless.
🔴 Gestion des alarmes et séquences d’erreur à travers l’indicateur lumineux rouge.
⚙️ Découverte d’une configuration avancée pour la détection d’anomalies électriques et la gestion marche/arrêt du moteur.
Téléchargement Retour au sommaire
Pilotage d’un Moteur Brushless via Arduino :
|
Dans cette vidéo, nous allons explorer un programme Arduino conçu pour contrôler la vitesse d’un moteur brushless en utilisant un contrôleur BLD-300B. Le code utilise la communication série pour recevoir des valeurs de vitesse entre 0 et 255, qui sont ensuite appliquées au moteur via ce contrôleur spécifique.
🔑 Points clés :
1️⃣ Utilisation du Contrôleur BLD-300B : Nous utilisons le contrôleur BLD-300B pour une meilleure régulation de la vitesse du moteur.
2️⃣ Configuration de la broche PWM : La broche 9 de la carte Arduino est configurée comme sortie pour le signal PWM.
3️⃣ Communication Série : Le programme utilise la communication série pour recevoir les valeurs de vitesse du moteur.
4️⃣ Validation des Entrées : Le code vérifie si les valeurs reçues sont dans la plage autorisée (0-255) avant de les appliquer.
5️⃣ Feedback Utilisateur : Des messages sont affichés sur le moniteur série pour informer l’utilisateur de l’état actuel du système.
.
Téléchargement Retour au sommaire
PWM et Rampes d’Accélération :
|
Cette vidéo vise à décomposer et analyser en détail un code Arduino avancé conçu pour la régulation de vitesse d’un moteur électrique. Le programme utilise la technique de modulation par largeur d’impulsion (PWM) pour communiquer avec le contrôleur du moteur. Nous examinerons la méthodologie permettant la saisie automatique de la vitesse en tours par minute (tr/min) via le moniteur série et sa conversion ultérieure en signaux PWM destinés au contrôleur. De plus, nous explorerons la conception et l’implémentation de rampes d’accélération et de décélération pour un contrôle plus nuancé de la dynamique du moteur. En parallèle, nous aborderons le rôle des capteurs à effet Hall, situés à l’arrière du moteur et interfacés avec la carte de contrôle, pour mieux comprendre leur contribution à l’ensemble du système de régulation de vitesse.
Téléchargement Retour au sommaire