
–
Mise à jour le 25/04/2018 : Le robot Maya ; Ce projet demande de la persévérance , entre les problèmes materiel , logiciel etc… la route est longue mais comme la très bien formulé Samuel Johnson ,ce n’est pas la force, mais la persévérance, qui fait les grandes œuvres.La suite de l’étude dans cette page intitulée « Etude du robot Maya suite «
Le robot Maya suite 3; Ce projet demande de la persévérance RedOhm
Sommaire :
- 29/08/2017 : Voici un bilan de la motorisation du bras et de la main de Maya.
- Description des servomoteurs pour le mouvement du haut du bras
- Description des servomoteurs pour le mouvement de l’avant bras ou du coude de Maya
- Description des servomoteurs pour la rotation du poignet du robot Maya
- Description des servomoteurs pour l’inclinaison du poignet du robot Maya.
- Description des servomoteurs pour les doigts de ma main
- Un ensemble de vue pour la main de Maya ( diaporama ).
- Une vidéo pour vous présenter les progrès d’ores et déjà réalisés sur le bras et la main du robot Maya ( vidéo du 28/08/2017 )
- 21/10/2017 : Deux mois de travail sur la main de Maya. ( photo )
- 04/11/2017 : Immersion chez RedOhm une séance d’essais . ( Vidéo )
- 17/12/2017 : Voici un aperçu du montage de la partie inférieure du châssis de Maya
- 09/01/2018 : Impression du tronc du robot Maya. ( photo )
- 15/01/2018 : Support buste ( diaporama )
- 21/01/2018 : Impression de la déco pour le robot Maya (Vidéo)
- 26/01/2018 : Modifications et améliorations du buste du robot Maya (photo)
- 27/03/2018 : Modification de l’avant-bras du robot Maya » Trappe rectangulaire « ( vidéo )
- 09/04/2018 : Modification de l’avant-bras du robot Maya Version ellipse ( photo )
- Retour au menu principal.
| Retour au sommaire |
29/08/2017 Voici un bilan de la motorisation du bras et de la main du robot Maya. |
Mouvement du haut du bras du robot Maya.
Le haut du bras du robot Maya. – RedOhm
La motorisation du haut du bras est assurée par un servomoteur Mastodon 9944 de la marque Topmodel . Ce matériel est disponible chez le distributeur France robotique, Il développe une poussée de 99 kg.cm et affiche une excellente performance. Sur ce matériel, pour avoir le couple maximal, il faudra construire une alimentation de 7.4 V de façon à optimiser le couple de sortie.

Servomoteur Mastodon 9944
Caractéristiques du servomoteur Mastodon 9944
- Couple: 99kg*cm (7.4V)
- Vitesse: 0,57″/60° (7.4V)
- Vitesse: 0,38″/40° (7.4V)
- Poids: 430g env.
- Dimensions (Lxlxh): 76x44x78,8mm env.
- Roulement: 2
- Pignons: métal
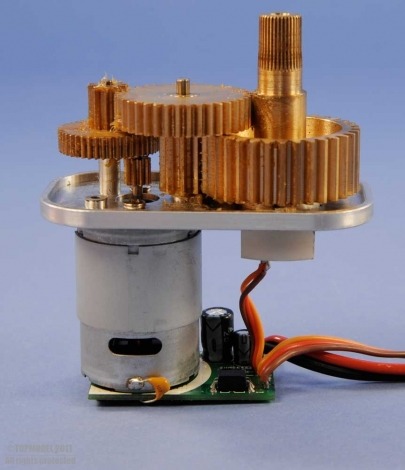
Servomoteur Mastodon 9944
Fournisseur : topmodel.fr
Mouvement de l’avant bras ou du coude de Maya .
La partie de l’avant-bras est motorisée par un servo de marque Hitec HS805BB, il développe un couple de 24 kg.cm. En fonction des applications, il est prévu un moteur avec un couple de 50 kg.cm , mais dont le coût est trois fois plus élevé que le moteur d’origine.
Caractéristiques du Servomoteur Hitec HS805BB
- Alimentation: 4,8 à 6 Vcc
- Course: 2 x 70°
- Couple: 24 kg.cm
- Vitesse: 0,14 s/60°
- Dimensions: 66 x 30 x 57 mm
- Poids: 152 gr
Voici les définitions techniques d’un servomoteur pour un éventuel remplacement sur la partie du coude . Le but recherché dans ce cas-là, est une augmentation du couple disponible. On passerait de 24 kg.cm à 50 kg.cm avec le servomoteur Hitec D-845WP
Caractéristiques du Servomoteur Hitec D-845WP
- Largeur: 32 mm
- Hauteur: 66 mm
- Longueur: 62 mm
- Poids: 227 gr
- Type de servo: standard
- Caractéristiques spéciales: large-tension numérique
- Type de moteur Servos: coreless
- Pignons : acier
- Tension de fonctionnement en V: 4.8-8.4 V
- Temps de fonctionnement s / 60 ° à 4,8 volts: 0,26
- Temps de fonctionnement s / 60 ° à 6,0 volts: 0,21
- Temps de fonctionnement s / 60 ° à 7.4 volts: 0.17
- Couple en kgcm à 4,8 volts: 32
- Couple en kgcm à 6,0 volts: 40
- Couple en kgcm à 7,4 volts: 50
- Denture: 25T
- Roulement à billes: oui
- Étanche: oui
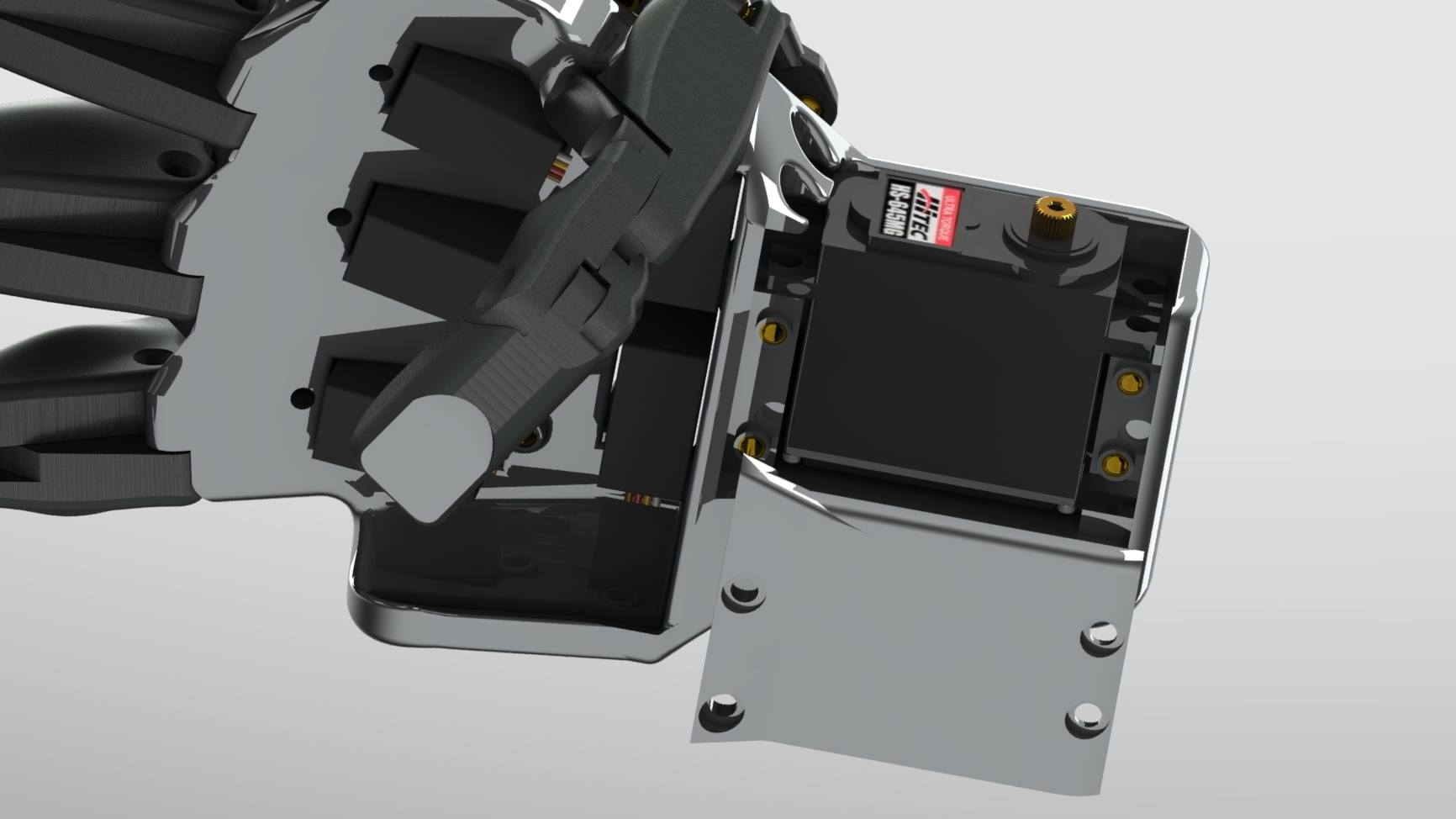
Rotation du poignet du robot Maya
Pour la partie rotation du poignet, nous avons un servomoteur Hitec HS645MG .Ce servomoteur à double roulements à billes se caractérise par un excellent centrage et un couple très élevé pour sa taille (Couple: 9,6 kg.cm).
Caractéristiques du Servomoteur Hitec HS645MG (rotation du poignet)
- Alimentation: 4,8 à 6 Vcc
- Course: 2 x 45°
- Couple: 9,6 kg.cm
- Vitesse: 0,2 s/60°
- Dimensions: 41 x 20 x 36 mm
- Poids: 54 gr
Voici les définitions techniques d’un servomoteur pour un éventuel remplacement. Le but recherché dans ce cas-là, est une augmentation du couple disponible. On passerait de 9,6 kg.cm à 17 kg.cm
Caractéristiques du Servomoteur Hitec HSB-9360TH (rotation du poignet)
Alimentation: 6 à 7.4Vcc
Course: 2 x 45°
Couple: 17 kg.cm pour 7.4 Vcc
Vitesse: 0,2 s/60°
Dimensions: 40 x 20 x 38 mm
Poids: 68 gr
Ce servomoteur apporte davantage de praticabilité. Vous pouvez programmer tous ses paramètres de performance en utilisant un logiciel dédié avec votre PC. Le sens de rotation peut être inversé et l’angle de déplacement peut être prolongé (180 degrés maximum) à l’aide d’un programmateur de servomoteur Hitec.
- Train d’engrenages en titane
- Pignon de sortie à 25 dents
- Puissance de sortie constante
- Circuit numérique programmable avec une résolution de 12 bits
- Faible consommation de courant
- Efficacité énergétique
Fournisseur : robotshop.com
Inclinaison du poignet du robot Maya.
Inclinaison du poignet, nous avons aussi un servomoteur Hitec HS645MG

Servomoteur Hitec HS645MG
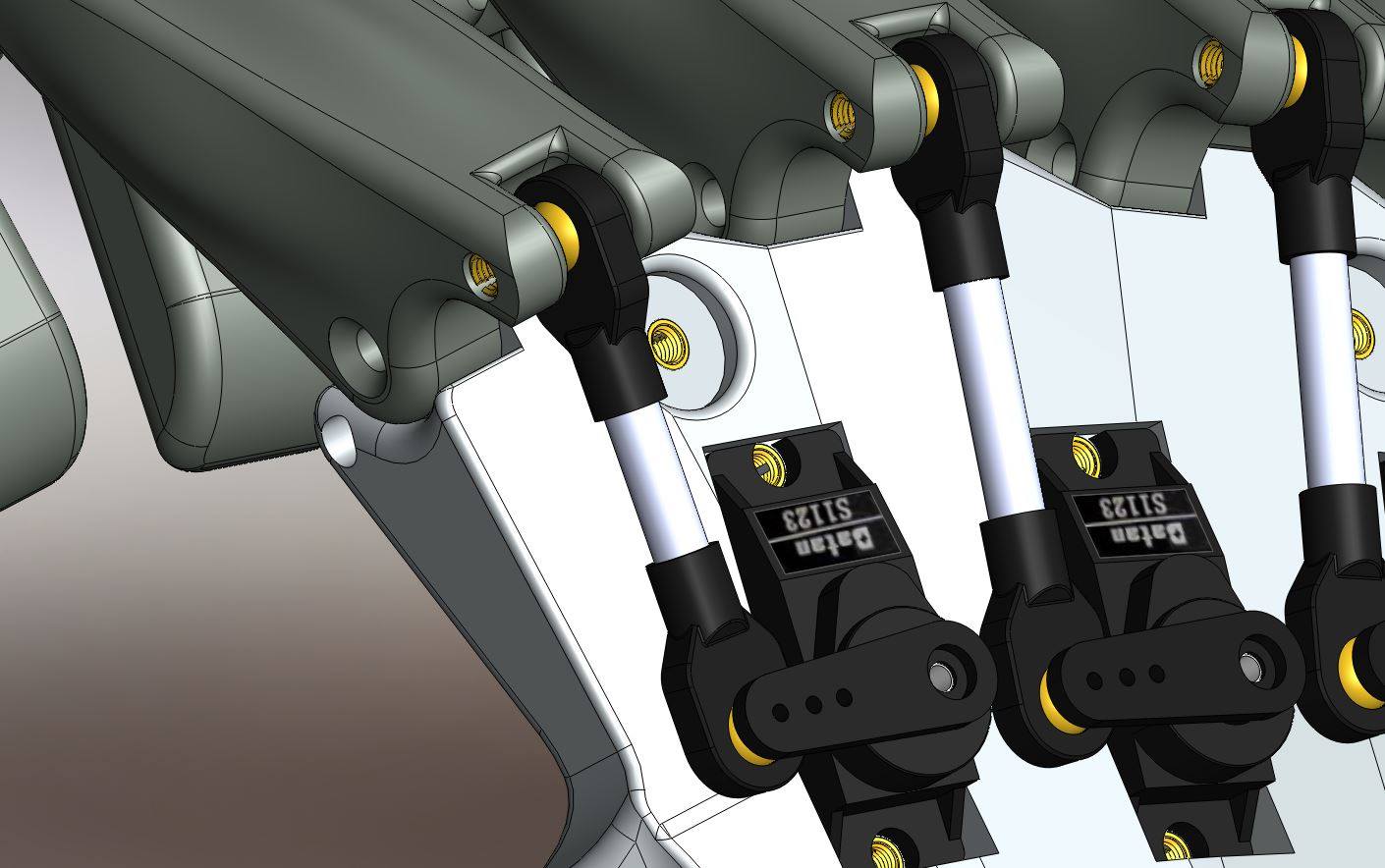
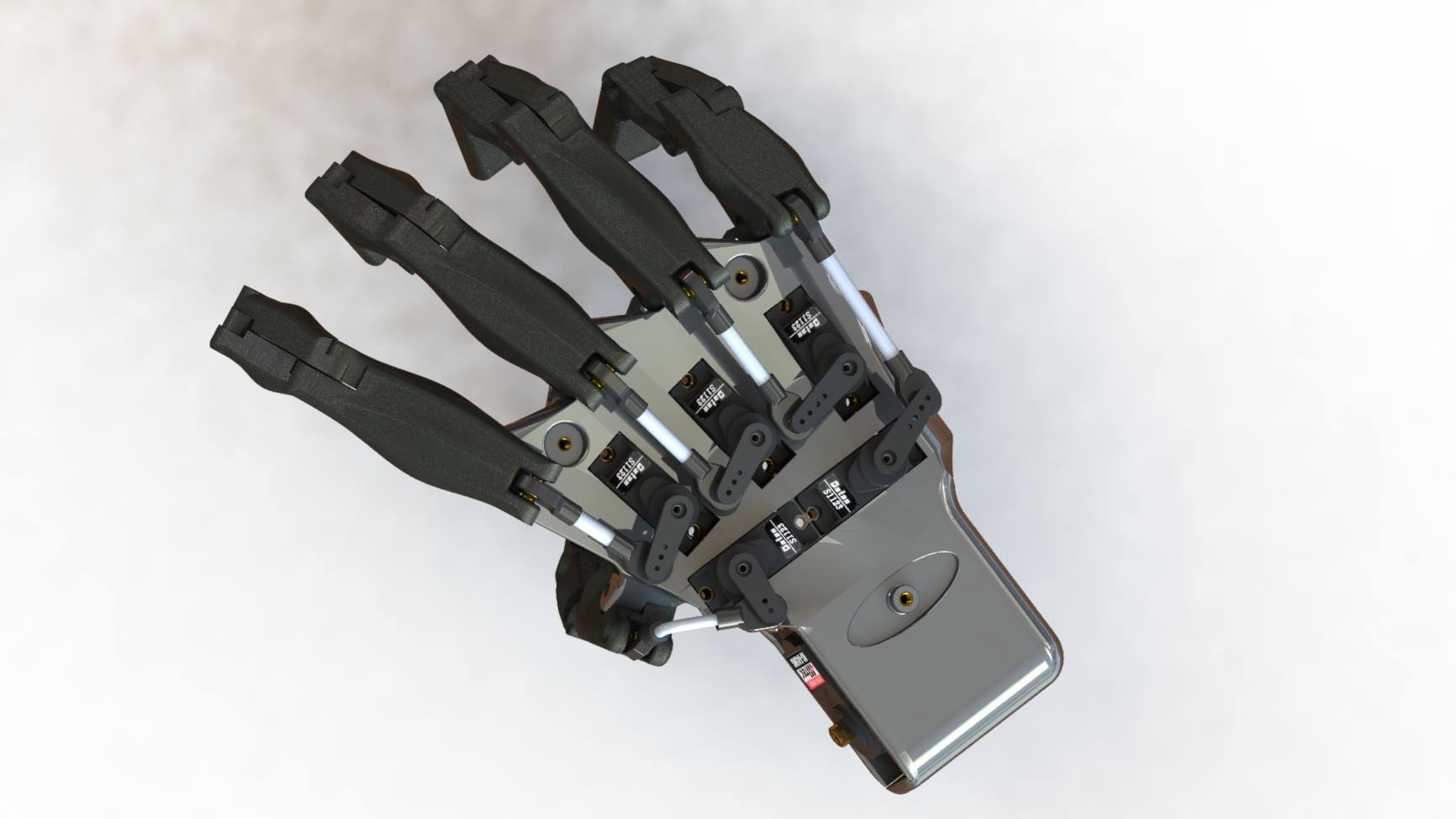
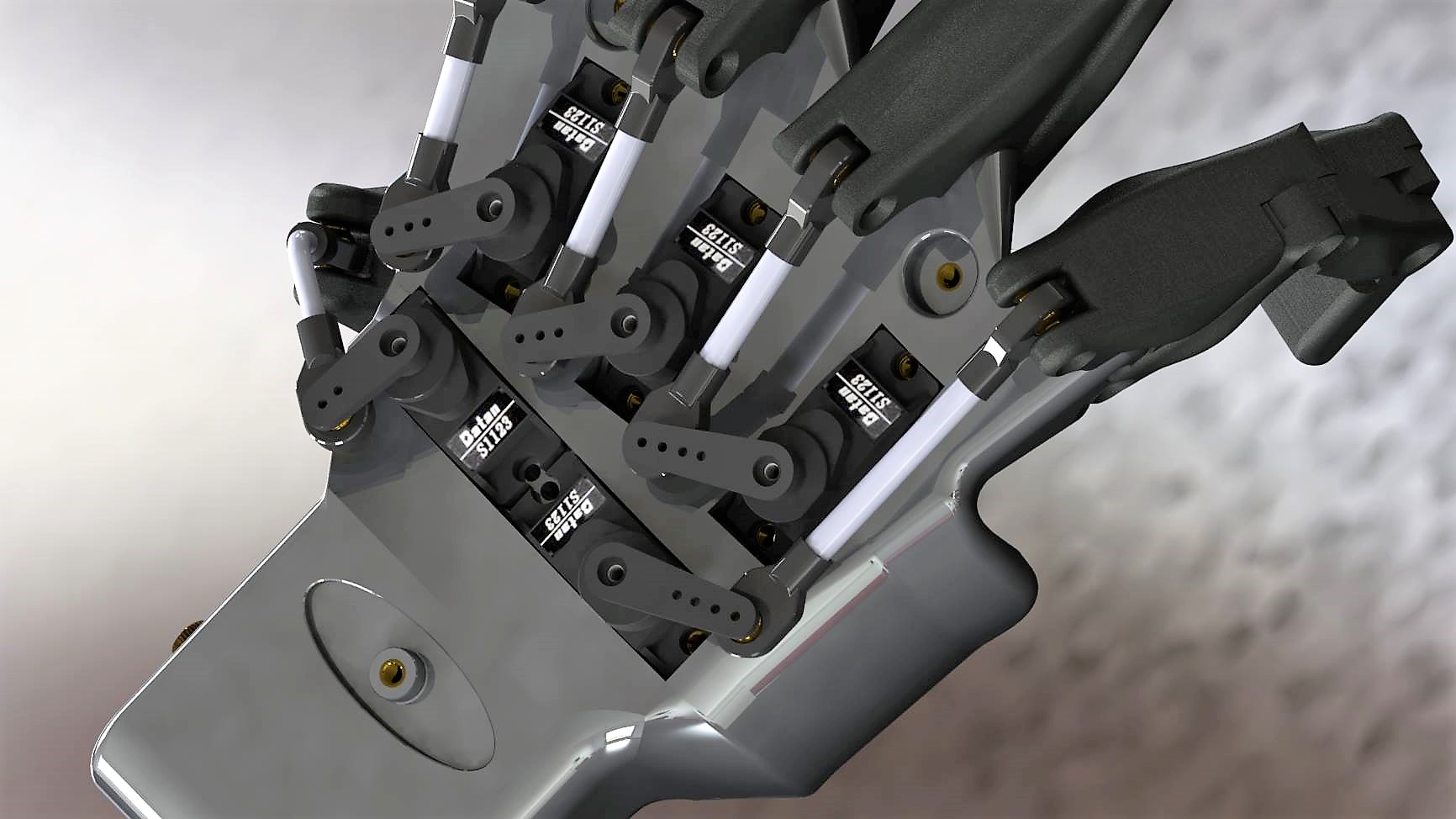
Mouvement des doigts de la main du robot Maya.
–

Vue des servomoteurs pour les doigts de Maya – RedOhm
Motorisation des mouvements des doigts.Pour le fonctionnement des doigts, nous allons utiliser le servomoteur Batan S1123 . Pourquoi ce servomoteur ? Est bien, simplement car il n’est pas comme les autres. Il dispose d’un fil de retour d’information (feed-back), cette information nous permet de connaître la position du servomoteur précisément. La valeur lue est une valeur analogique, qui peut être lu facilement soit sur une carte Arduino soit sur la carte Ez-Robot. Cette information nous sera utile pour le cas suivant, sommes-nous bien arrivés à la valeur fixée, si l’information de retour ne correspond pas à la valeur fixée on n’en déduira que le moteur est bloqué et dans ce là, le servomoteur chauffe, et au pire des cas, il peut se détruire.
Caractéristiques du Servomoteur Batan S1123
- Dimensions : 11.57mm / 0,45 « x 22.75mm / 0,89 » x 29.45mm / 1,15 «
- Dimensions max : 11.57mm / 0,45 « x 32.71mm / 1,28 » x 31.76mm / 1,25 «
- Longueur du câble (au minimum) : 131.67mm / 5,18 « de long
- Couple : 22,24 oz * in / 1,6 kg * cm à 6V
- Vitesse : 0,1 sec / 60 ° à 6V
- Poids : 13,82 grammes
- Double roulement à billes
- Engrenage en plastique
- Environ 120 dégrées de rotation (500 à 2500 µs)
–
Un ensemble de vue pour la main de Maya






–
Une vidéo pour vous présenter les progrès d’ores et déjà réalisés sur le bras et la main du robot Maya
| Retour au sommaire |
![]()
21/10/2017 Deux mois de travail sur la main de Maya |
Nous voilà au terme de deux mois de travail sur la réalisation de la main de Maya, qui est enfin opérationnelle.Voila quelques information techniques .
Informations techniques pour les filaments :
Le filament utilisé pour la réalisation de cet ensemble vient d’une société française ArianePlast dont voici quelques informations.
- Températures : 200-220°c
- Épaisseur de couches : 50 microns à 0.3mm
- Diamètre : contrôlé par un système de mesure laser qui permet une traçabilité des produits.
- Sécurité produit : Garanti sans Bisphénol A
- Réaction à l’environnement : Faible reprise d’humidité
-
Produit : Sans matière recyclée ce filament est d’une qualité constante. Il est également certifié ROHS ce qui exclut la présence de substances dangereuses.
Cette résine Ingeo 4043D est déjà reconnue dans l’impression 3D et dispose d’un certificat de contact alimentaire tout comme les pigments utilisés pour la coloration.
Informations pour l’impression :
Cette impression a été réalisée sur les imprimantes Zortrax M200 et M300 . Les paramètres sont les suivants profils Zglass -30° avec le module Ztemp.
Information pour le montage mécanique :
La pose d’inserts en laiton est obligatoire pour augmenter la résistance de l’ensemble à l’usure et éventuellement au montage et démontage pour la maintenance.
Motorisation pour le prototype :
Type de servomoteur utilisé : Servomoteur ES08MA miniature avec pignonnerie métallique.

Servomoteur ES08MA avec pignonnerie métallique – Robot Maya
- Alimentation: 4,8 à 6 Vcc
- Couple: 1,6 kg.cm à 4,8 Vcc
- Vitesse: 0,12 s/60° à 4,8 Vcc
- Dimensions: 24 x 12 x 29 mm
| Retour au sommaire |
![]()
04/11/2017 : Immersion chez RedOhm une séance d’essais . |
–
–
| Retour au sommaire |
![]()
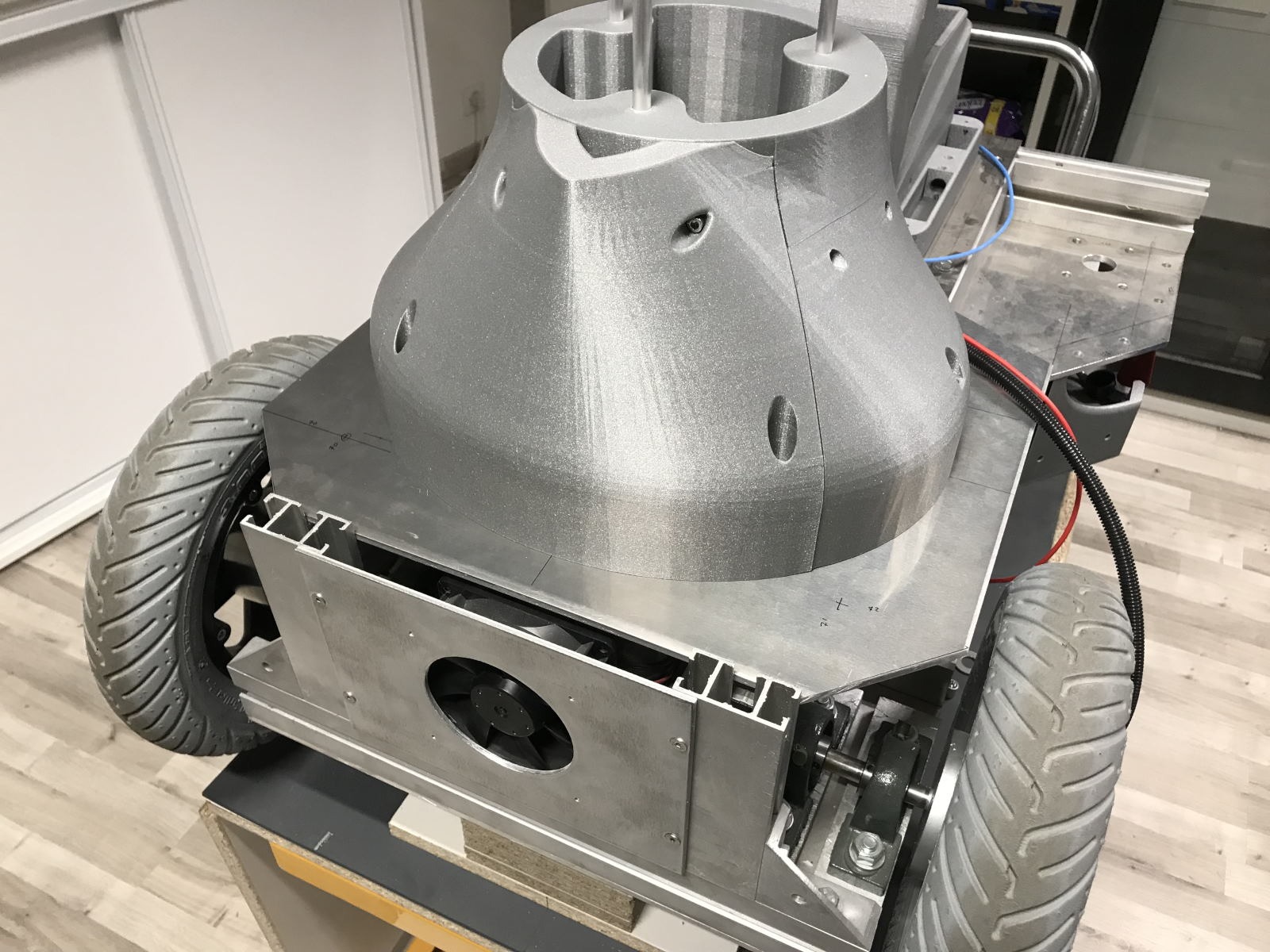
17/12/2017 : Voici un aperçu du montage de la partie inférieure du châssis de Maya |
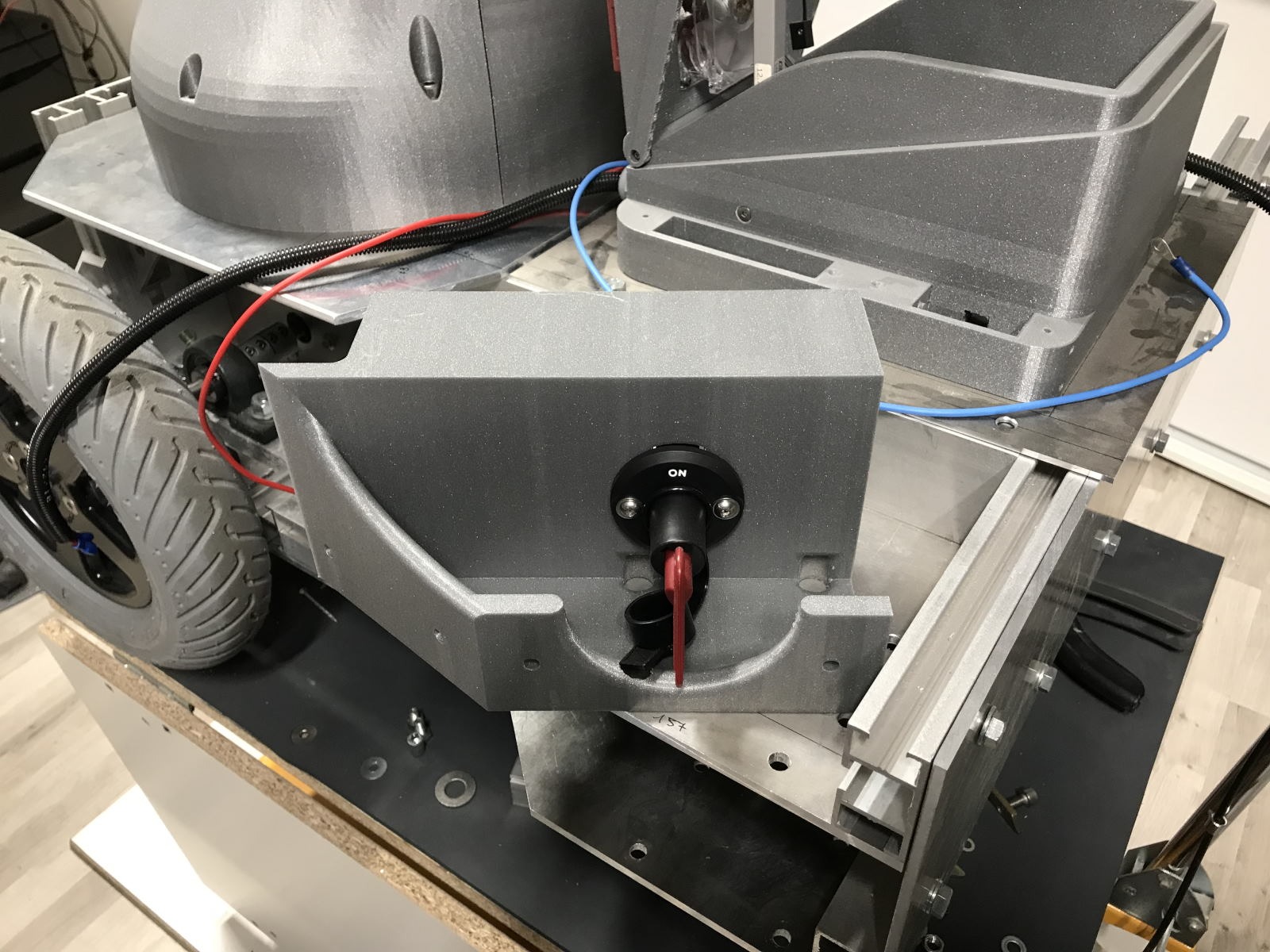
La base du châssis de Maya est positionnée et fixée sur une plaque d’aluminium. La fixation s’opère par des grandes tiges filetées calées par des tubes en aluminium traversant les blocs du châssis de Maya. Cette partie de construction est relativement longue car les pièces imprimées nécessitent des temps importants pour leur réalisation.Il faut savoir qu’une des pièces a nécessité plus de 108 heures d’impression pour sa réalisation.
Nous avons réalisé des pièces annexes au châssis. Comme le support pour le coupe batterie qui se trouve inséré entre deux plaques d’aluminium. Il nous reste encore 12 pièces à imprimer qui possèdent des tailles relativement importantes soit encore 1005 heures d’impression.
À cela, il faut ajouter des pièces qui nous servent à la construction du châssis, comme un guide de perçage pour fixer la colonne sur la plaque en aluminium. Rien que pour cette réalisation, nous avons besoin de 40 heures d’impression.

Pierce de carrosserie , base du robot Maya – RedOhm
Pierce de carrosserie , base du robot Maya – RedOhm01
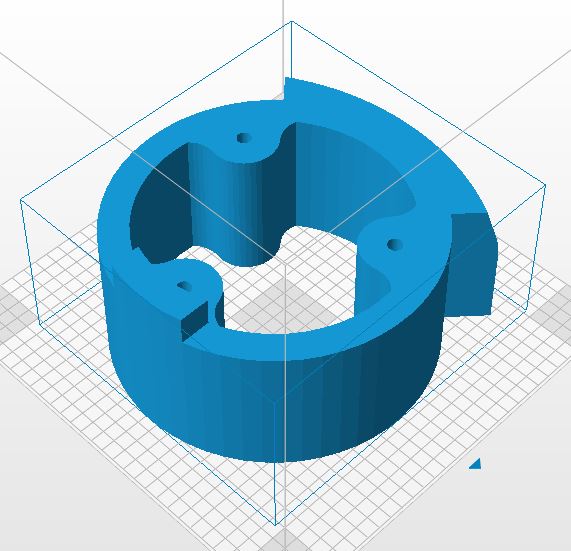
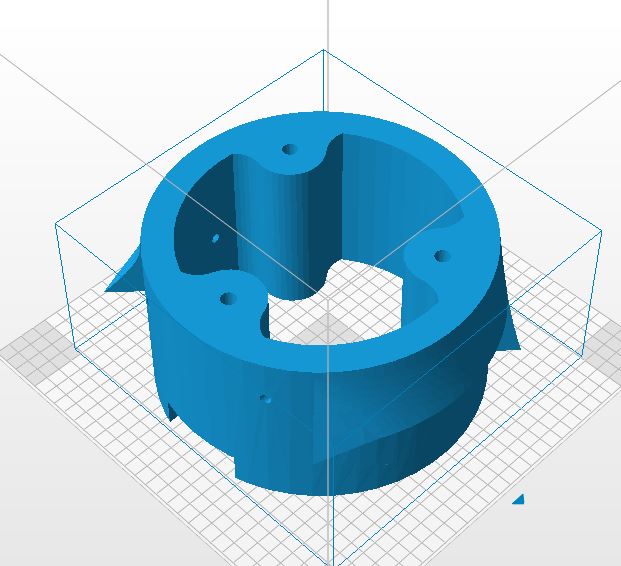
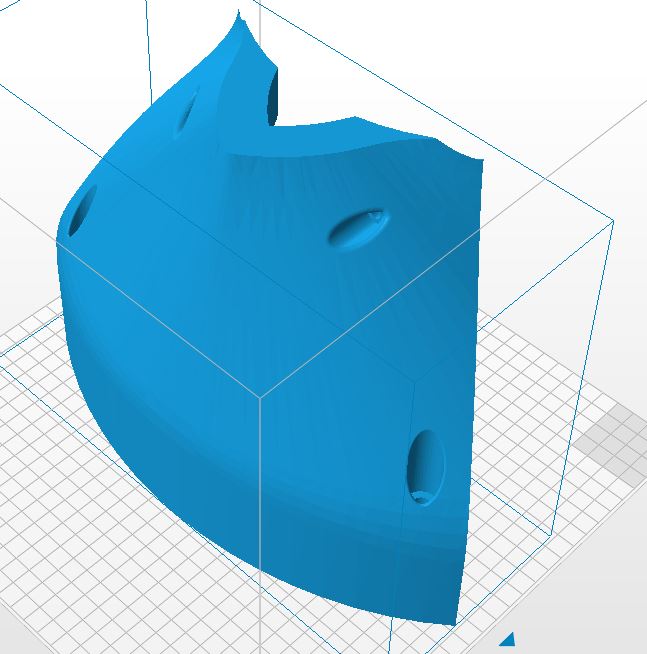
Pierce de carrosserie , support coupe batterie – RedOhm01

Pierce de carrosserie , support coupe batterie – RedOhm02
| Retour au sommaire |
![]()
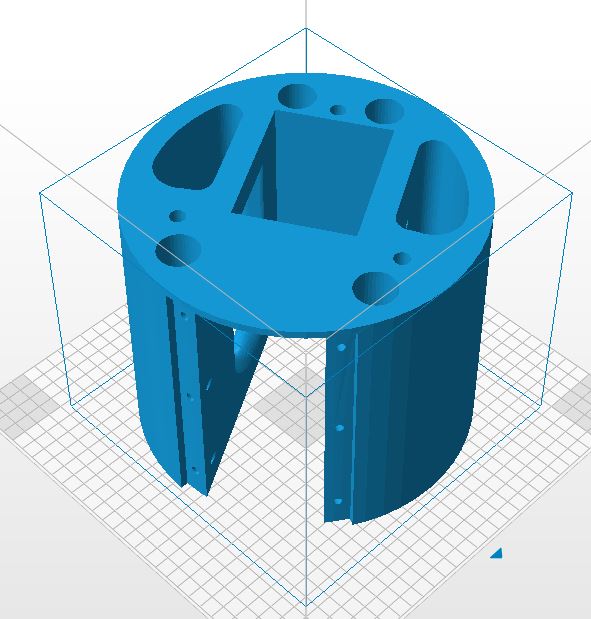
09/01/2018 : Impression du tronc |

Construction du tronc de Maya
 Piece 900 – Robot Maya |
 Piece 901 – Robot Maya |
|
|
 Piece 903 – Robot Maya |
 Piece 904 – Robot Maya
|
 Piece 905 – Robot Maya |
|
 Pièce 906 – Robot Maya |
 Pièce 907 – Robot Maya |
 Piece 908 – Robot Maya |
 Pièce 909 – Robot Maya |
 Pièce 910 – Robot Maya |
 Pièce 911 – Robot Maya |
 Pièce 910 – Robot Maya |
|
|
Information pour une imprimante Zortrax M300
|
|||||||
|
Numéro |
Layer en mm |
Infill | Dimension X |
Dimension Y |
Dimension Z |
Temps en heure | Poids en gramme |
| 900 | 0.19 | High | 236 mm | 219 mm | 120 mm | 83 h 24 m | 1146 |
| 901 | 0.19 | High | 233 mm | 241 mm | 120 mm | 104 h 24 m | 1370 |
| 903 | 0.19 | High | 122 mm | 286 mm | 220 mm | 70 h 34 mm | 948 |
| 904 | 0.19 | Meduim | 259 mm | 125 mm | 169 mm | 36 h 56 mm | 460 |
| 905 | 0.19 | Meduim | 259 mm | 125 mm | 169 mm | 36 h 56 mm | 460 |
| 906 | 0.19 | Meduim | 273 mm | 219 mm | 90 mm | 47 h 52 mm | 631 |
| 907 | 0.19 | High | 220 mm | 220 mm | 194 mm | 143 h | 1770 |
| 908 | 0.19 | High | 28 mm | 107 mm | 174 mm | 12 h 40 mm | 108 |
| 909 | 0.19 | High | 260 mm | 239 mm | 154 mm | 111 h 40 mm | 1462 |
| 910 | 0.19 | High | 199 mm | 200 mm | 109 mm | 96 h 00 mm | 1167 |
| 911 | 0.19 | High | 267 mm | 243 mm | 137 mm | 104 h 46 mm | 1409 |
| Temps total => | 708 h 58 mm | ||||||
| Poids total => | 7493 g | ||||||
Profile d’impression : Z-glass , soit une température de 255° après le support réalisé on soustrait 20° avec le Z-temp.
Description du Z-temp : Le Z-Temp est un accessoire à plugger sur votre tête d’extrusion Zortrax afin d’élargir son champ d’application . Il permet ainsi d’imprimer la quasi totalité des matériaux d’impression .
Z-temp
A savoir : L’utilisation de Z-TEMP n’est pas couverte par Zortrax et doit se limiter à un usage experimental, sous surveillance et sous la responsabilité de l’utilisateur.
Type de filament : fil PLA Aluminium métallisé 3D filament Arianeplast
FPLAALUMET175
Information fournisseur sur le filament :
Disponible en 1.75mm et 2.85mm (2.85mm compatible avec les extrudeurs 3mm) Ces bobines de consommable sont entièrement produite en France dans nos ateliers avec uniquement de la matière vierge. Garanti sans Bisphénol A et faible reprise d’humidité . Sans matière recyclée ce filament est d’une qualité constante. Il est également certifié ROHS ce qui exclu la présence de substances dangereuses.
Cette résine Ingeo 4043D est déjà reconnue dans l’impression 3D et dispose d’un certificat de contact alimentaire tout comme les pigments utilisés pour la coloration. Caractéristiques Techniques Températures : 200-230°c épaisseur de couches : 50 microns à 0.3mm Diamètre contrôlé par un système de mesure laser qui permet une traçabilité des produits.
Compatible avec la plupart des grandes marques d’imprimantes adaptées à travailler le PLA et permet des vitesses d’impression élevé. Liste des machines sur lesquelles ce filament a déjà été testé : -Rep rap – Makerbot – Dreamer – Up mini – Spiderbot – ED3D extrudeur – Hexagone extrudeur – Hotends.fr extrudeur – createbot – witbox – Leapfrog- Dagoma- Ultimaker
en cours de mise à jour
| Retour au sommaire |
![]()
15/01/2018 : Support buste |
Voici quelques photos du support buste de Maya, vous pourrez vous faire une petite idée de la complexité de l’ensemble.
Support buste pour le robot Maya – RedOhm
–
Voici le diaporama attendre 8 secondes entre chaque photo .


–
| Retour au sommaire |
![]()
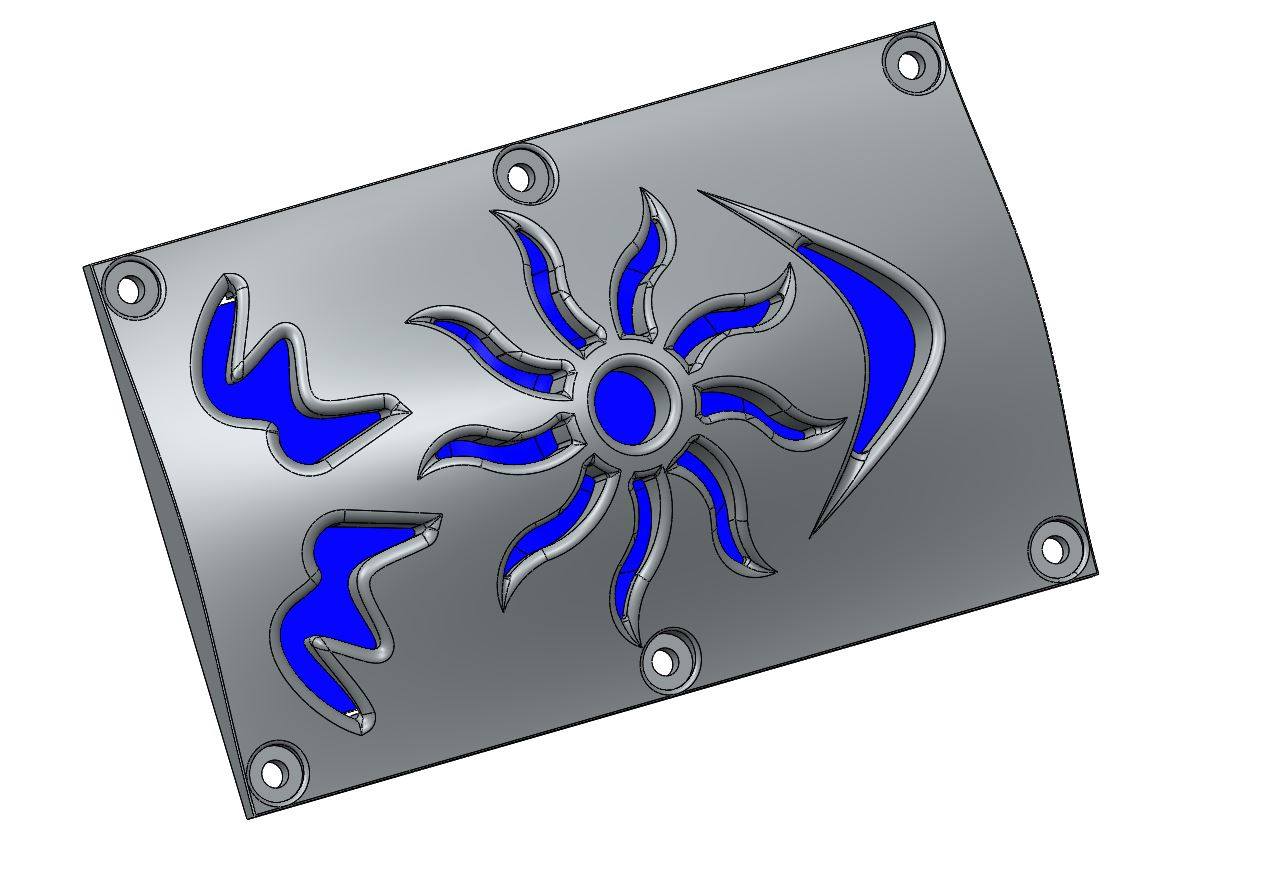
21/01/2018 : Impression de la déco pour le robot Maya |
–
–
 La déco dans l’imprimante 3D |
 La déco du robot Maya 01 |
|
 La déco du robot Maya 02 |
 La déco du robot Maya 03 |
| Retour au sommaire |
![]()
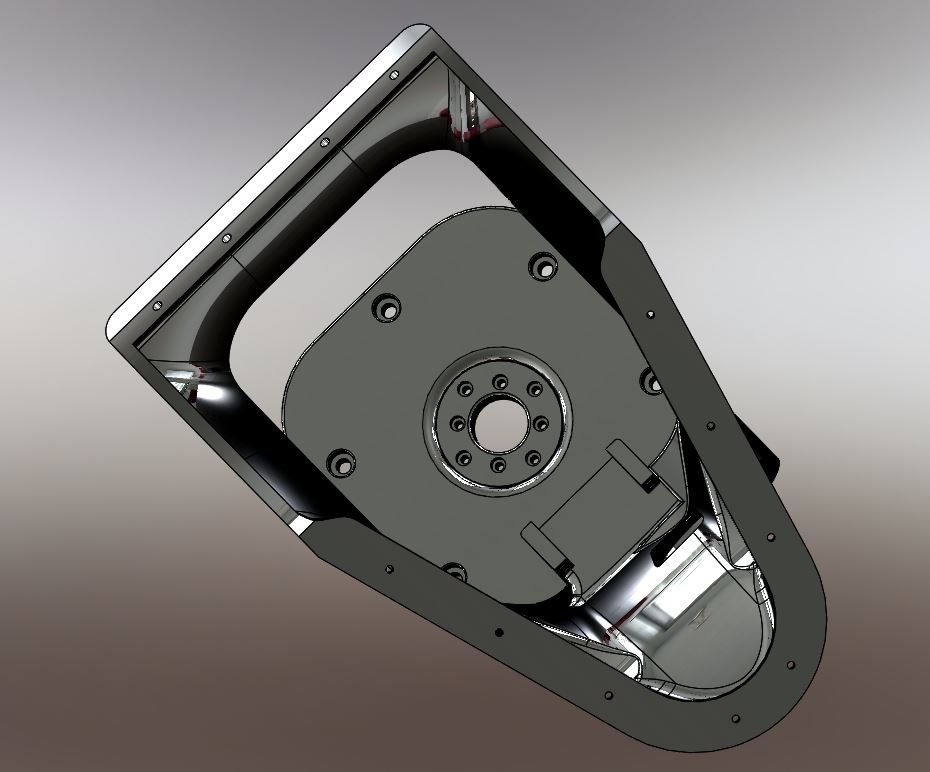
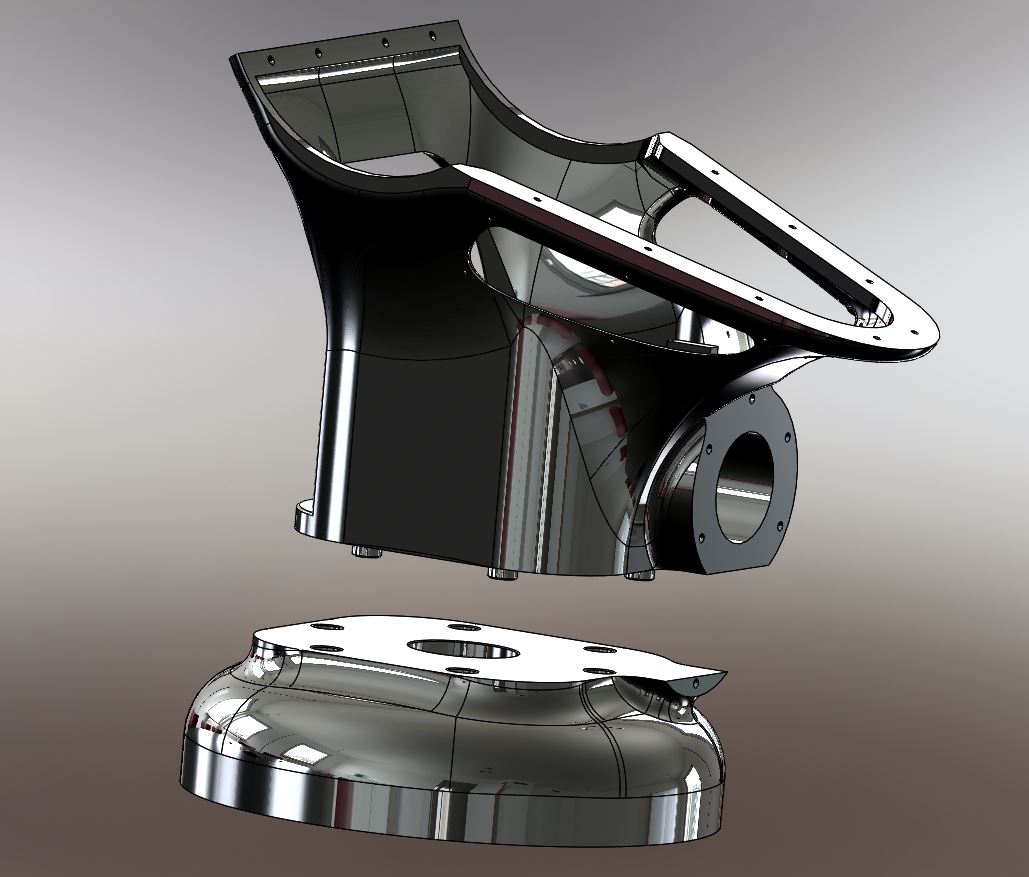
26/01/2018 : Modifications et améliorations du buste
|
–
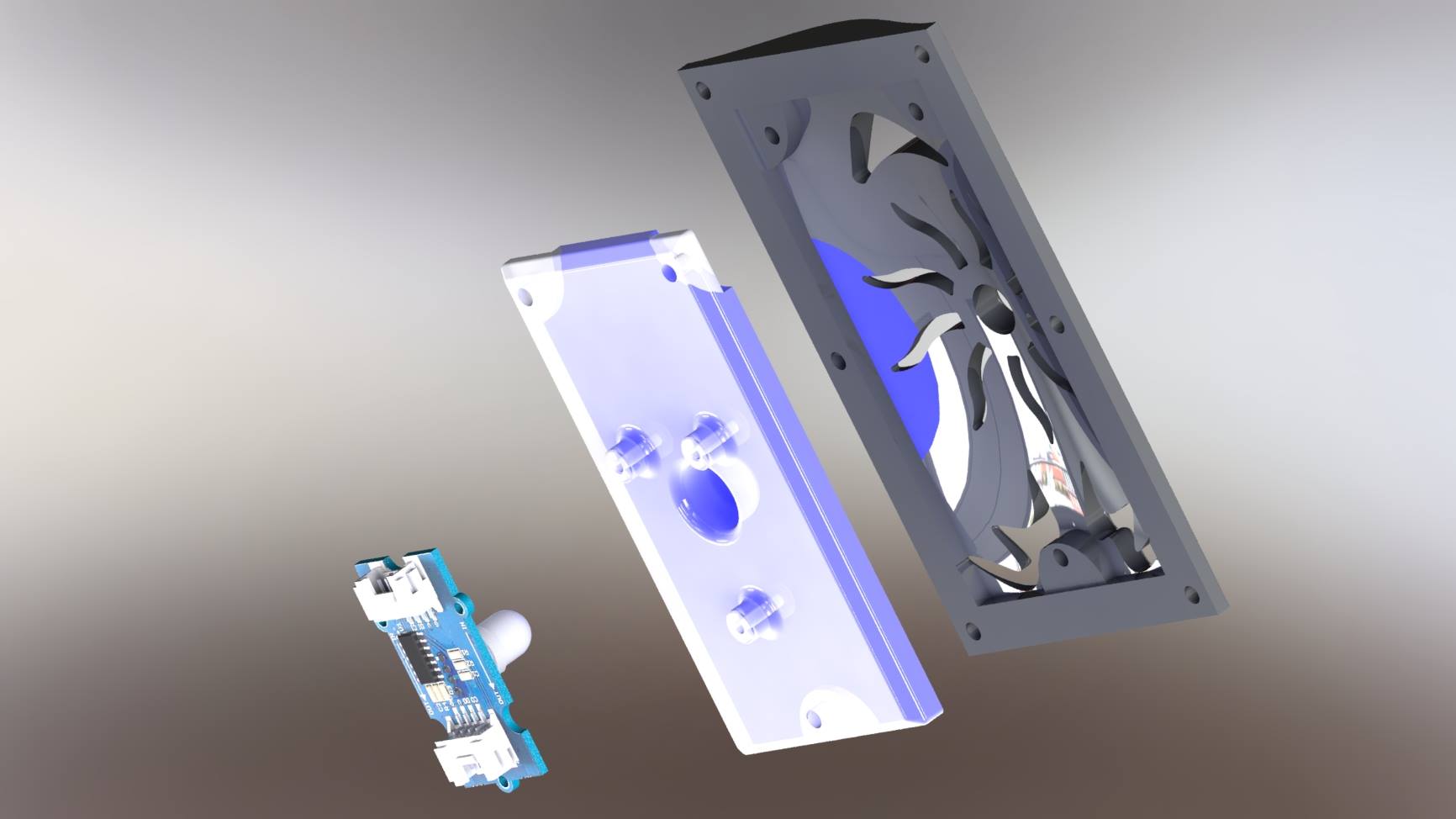
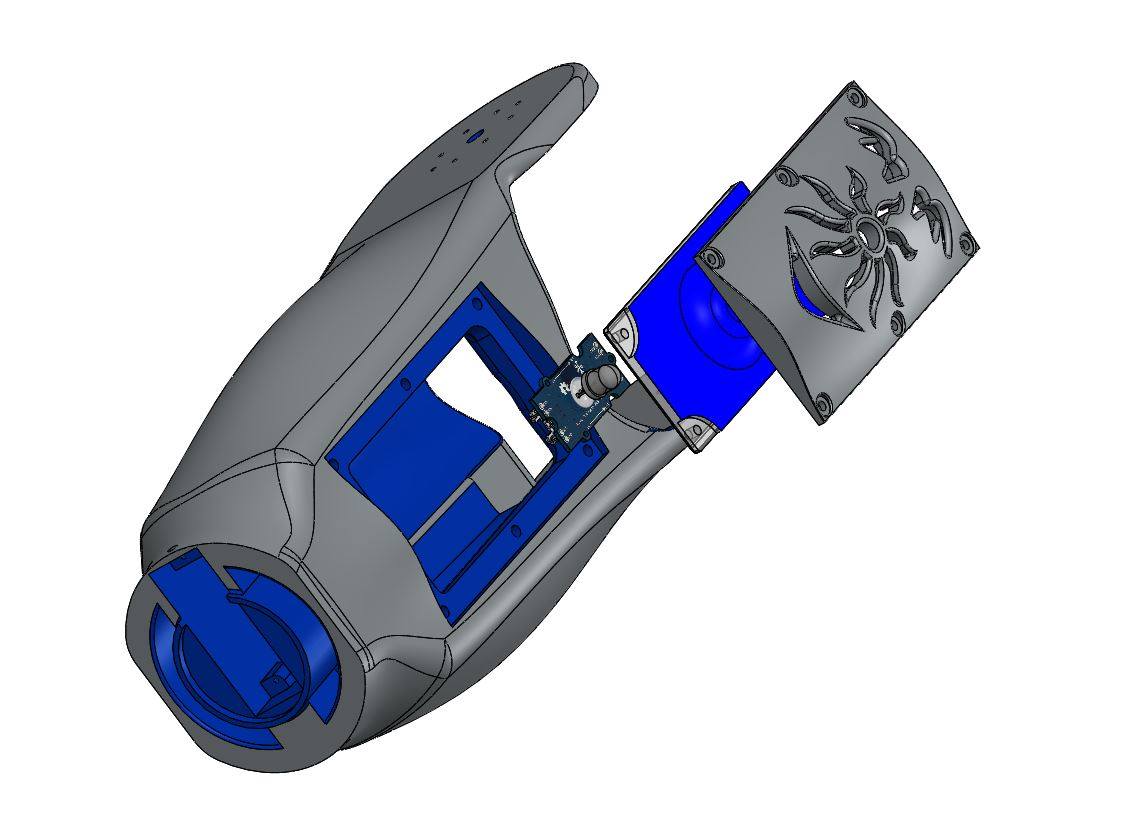
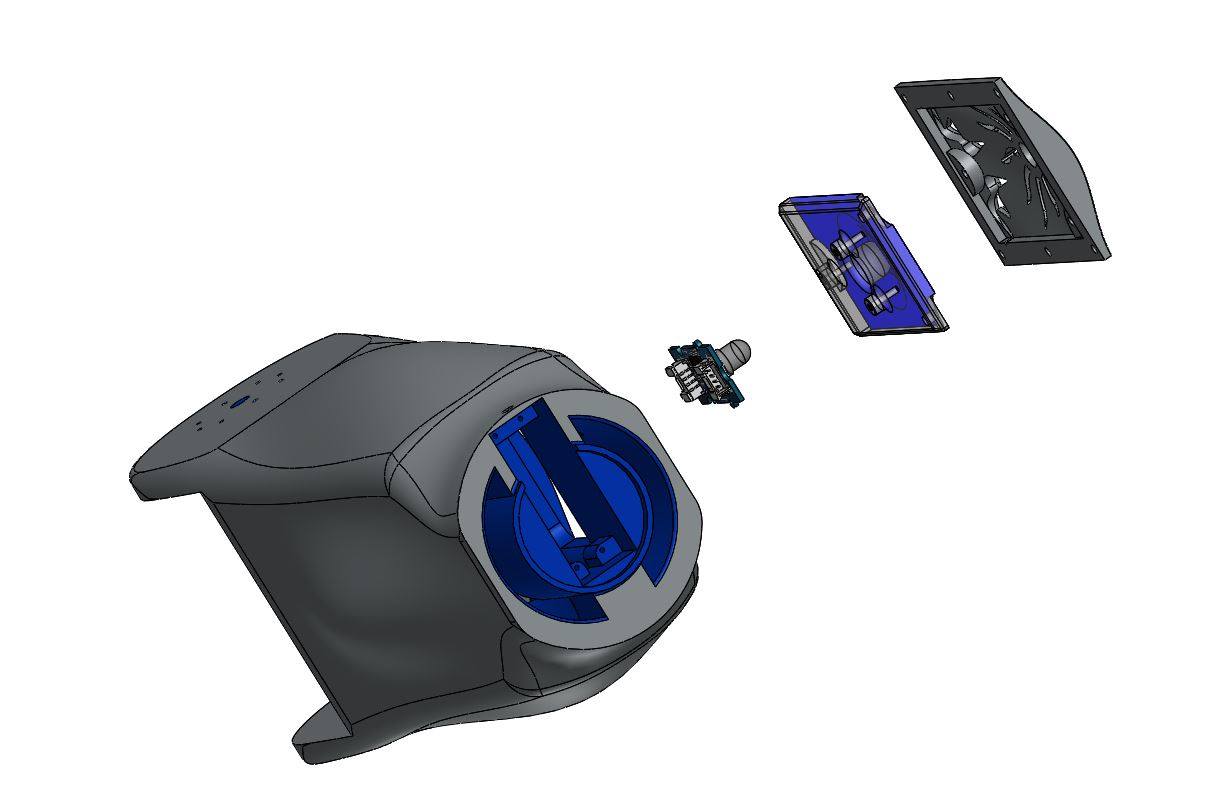
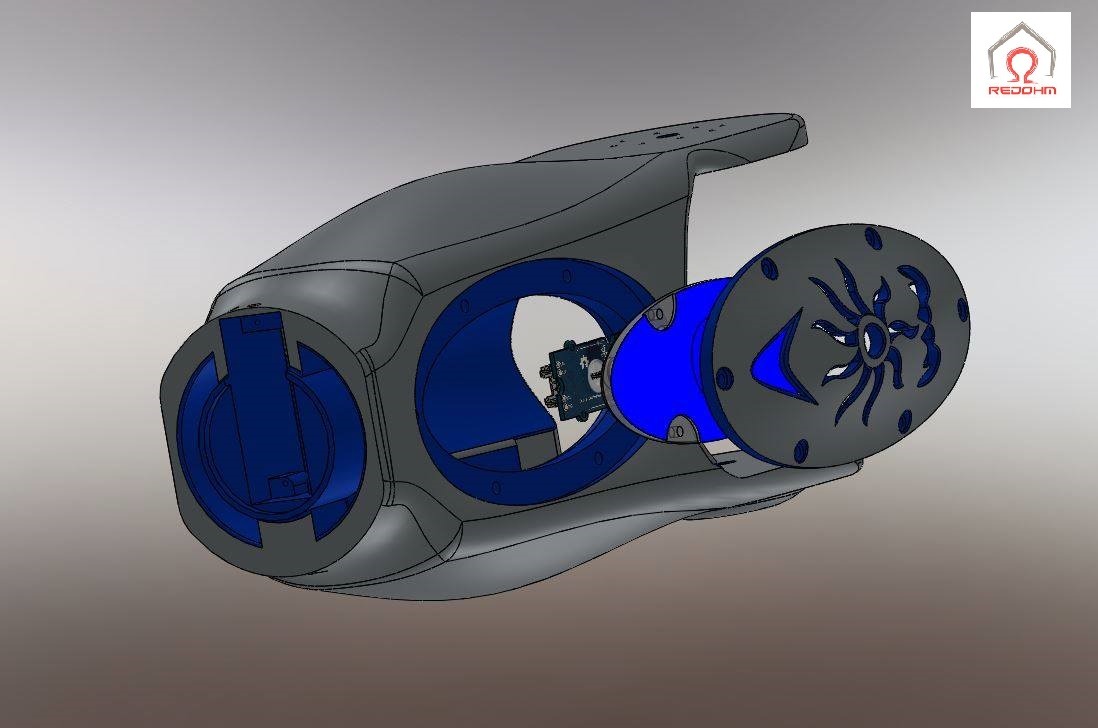
Apparition de l’iris motorisé en dessous du torse. Une grille de ventilation pour le compartiment accessoire, et enfin deux grilles de ventilation sur le compartiment supérieur.

Maya le16/01/2018 – RedOhm
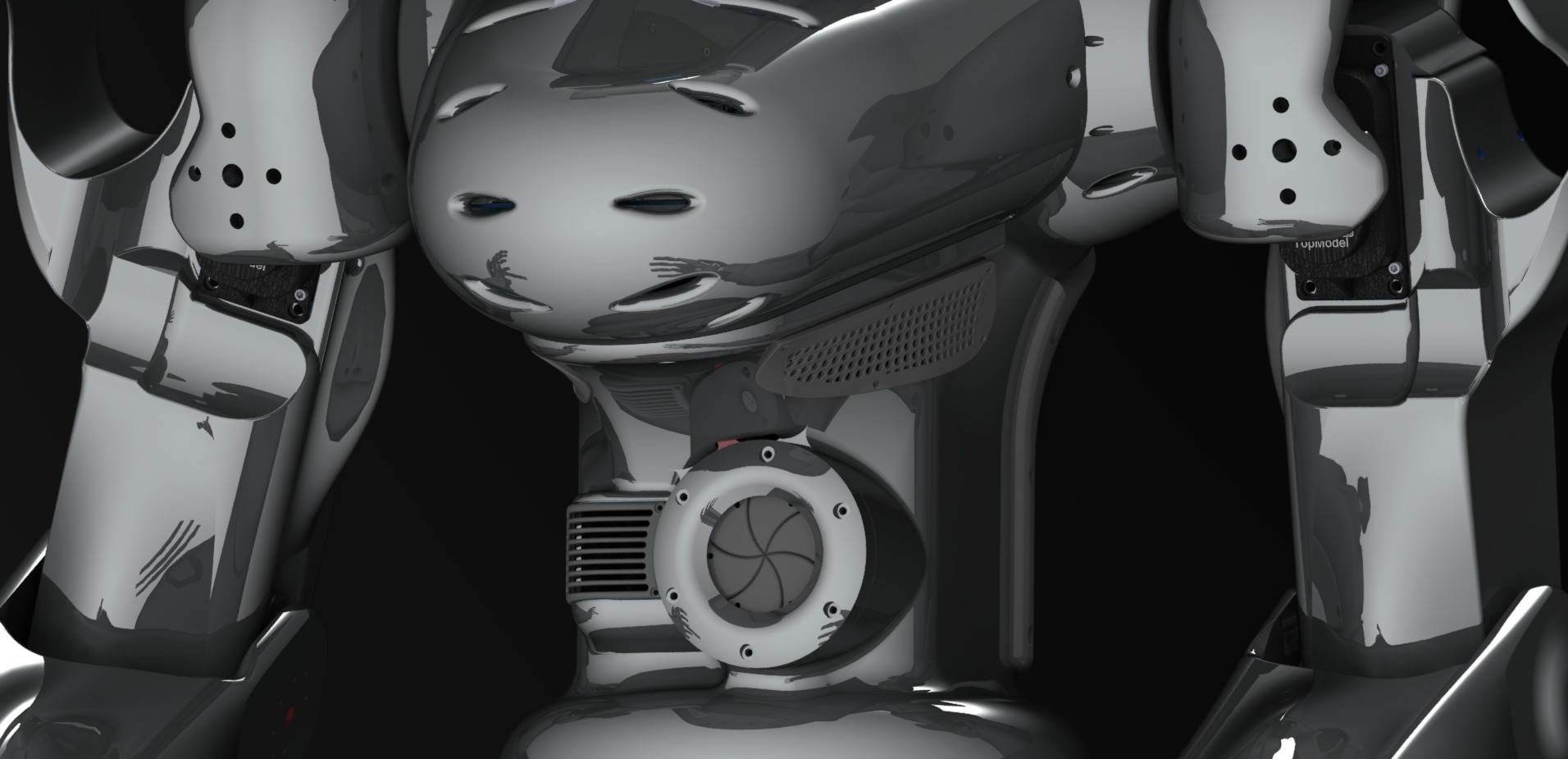
Gros plan sur les modifications du buste . RedOhm
| Retour au sommaire |
![]()
27/03/2018 : Modification et amélioration de l’avant-bras
|
Création de la trappe de câblage sur l’avant bras de Maya – RedOhm –
Voici le diaporama attendre 5 secondes entre chaque photo .
| Retour au sommaire |
![]()
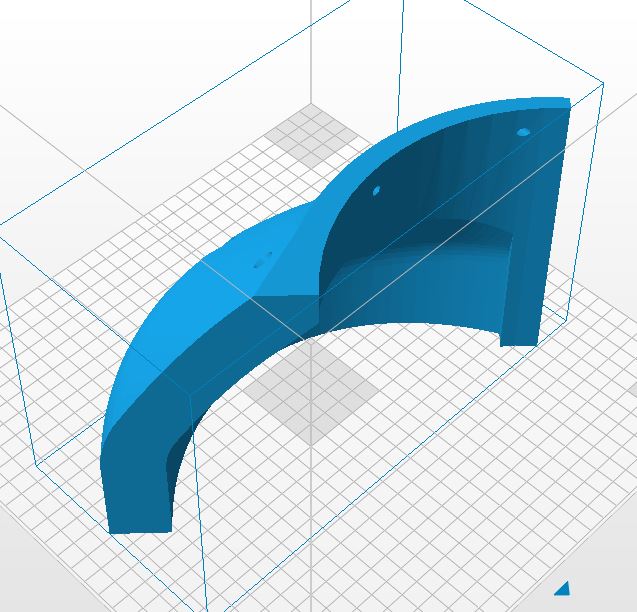
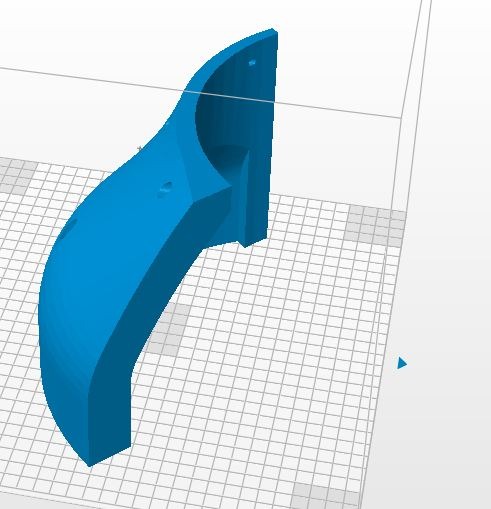
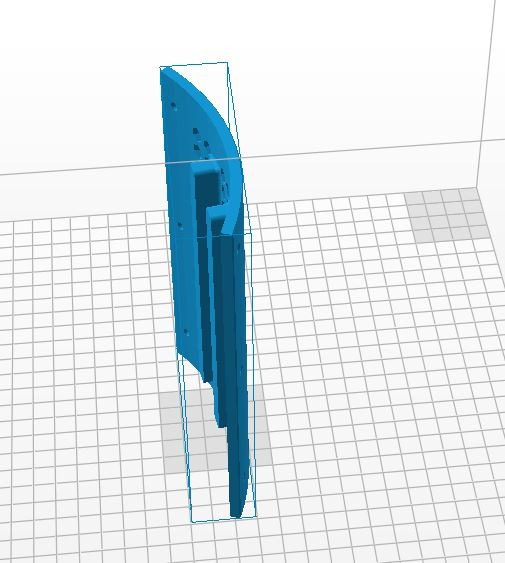
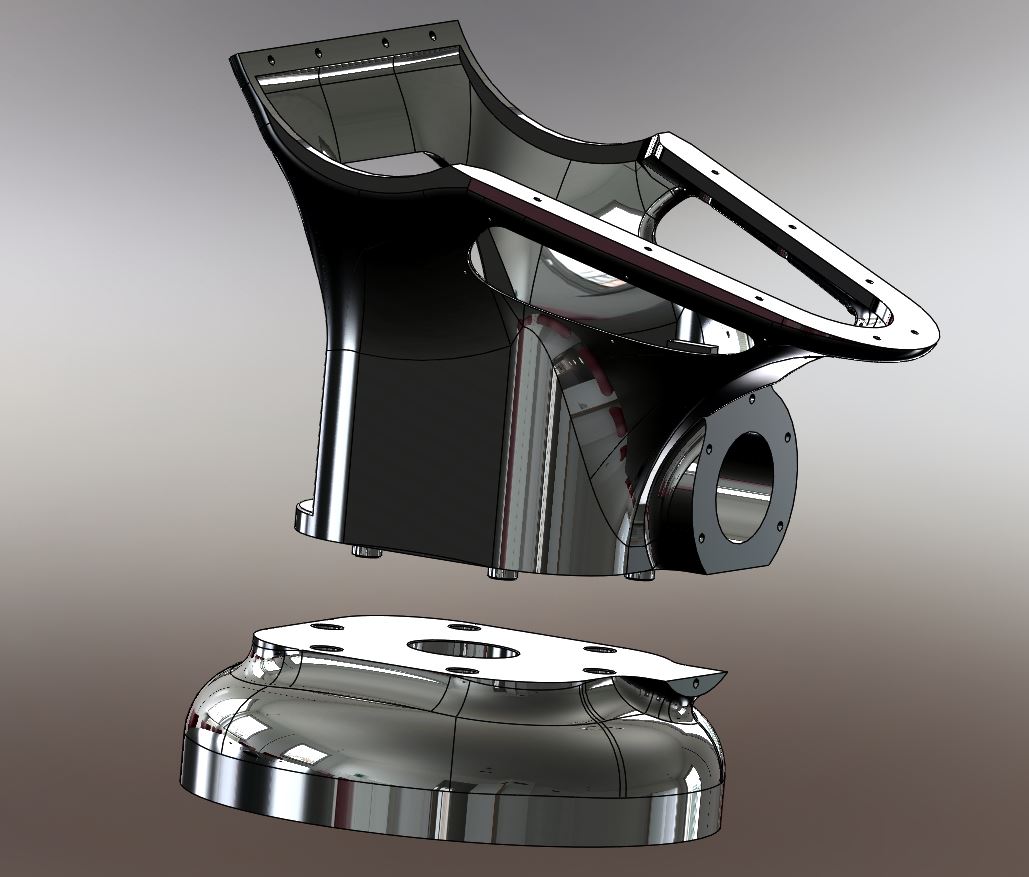
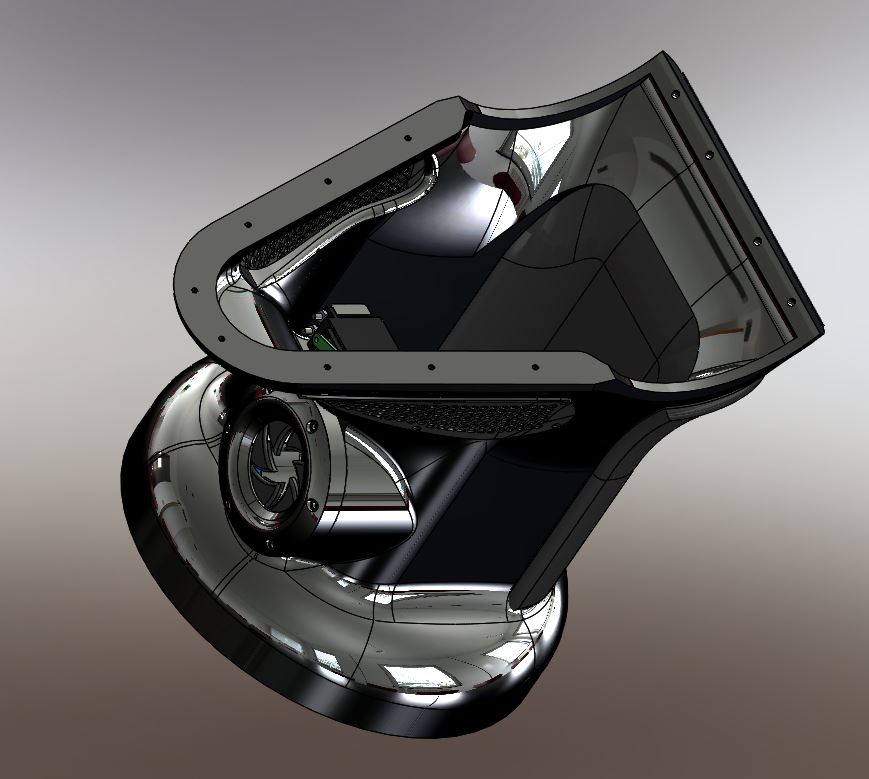
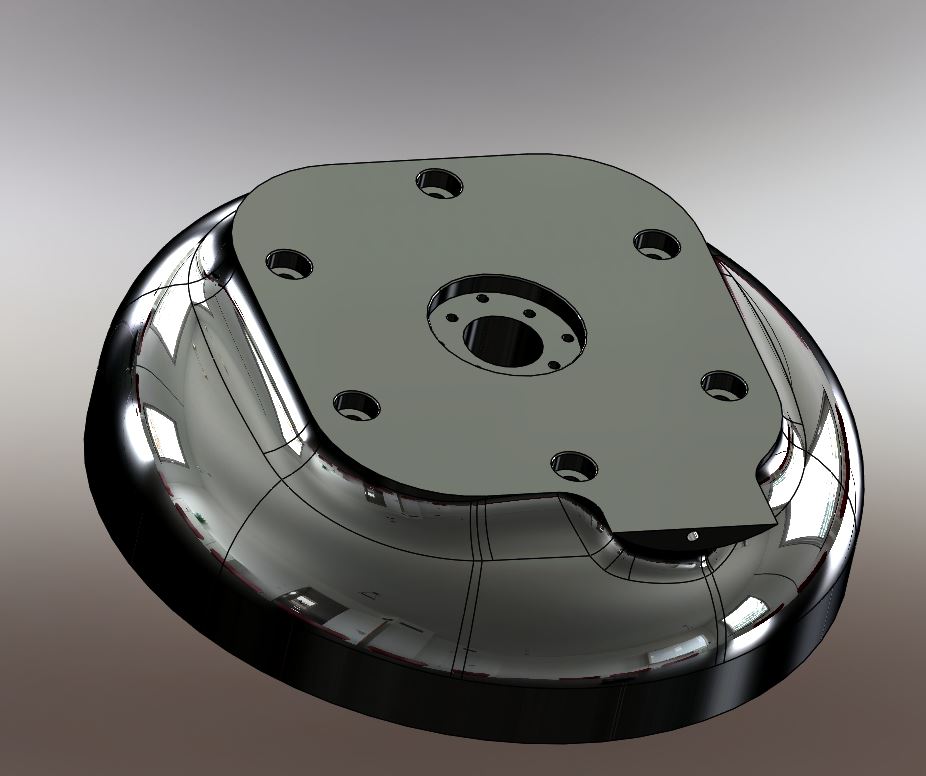
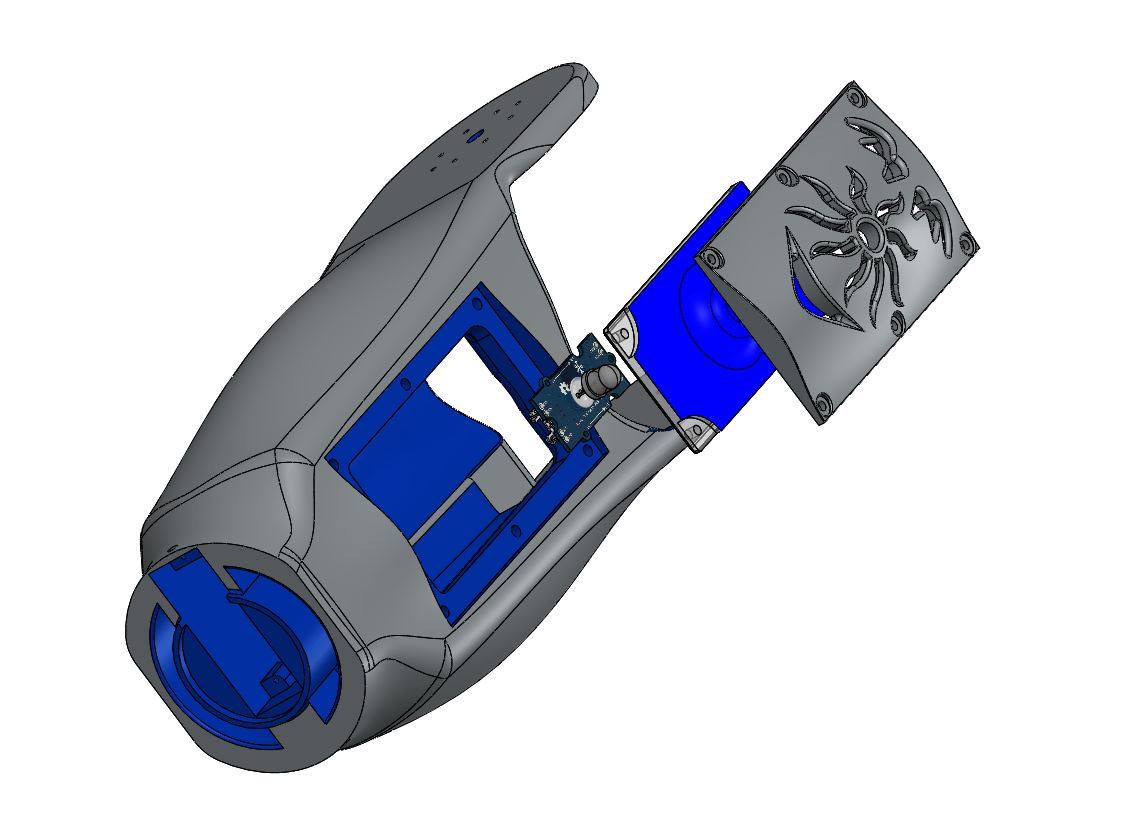
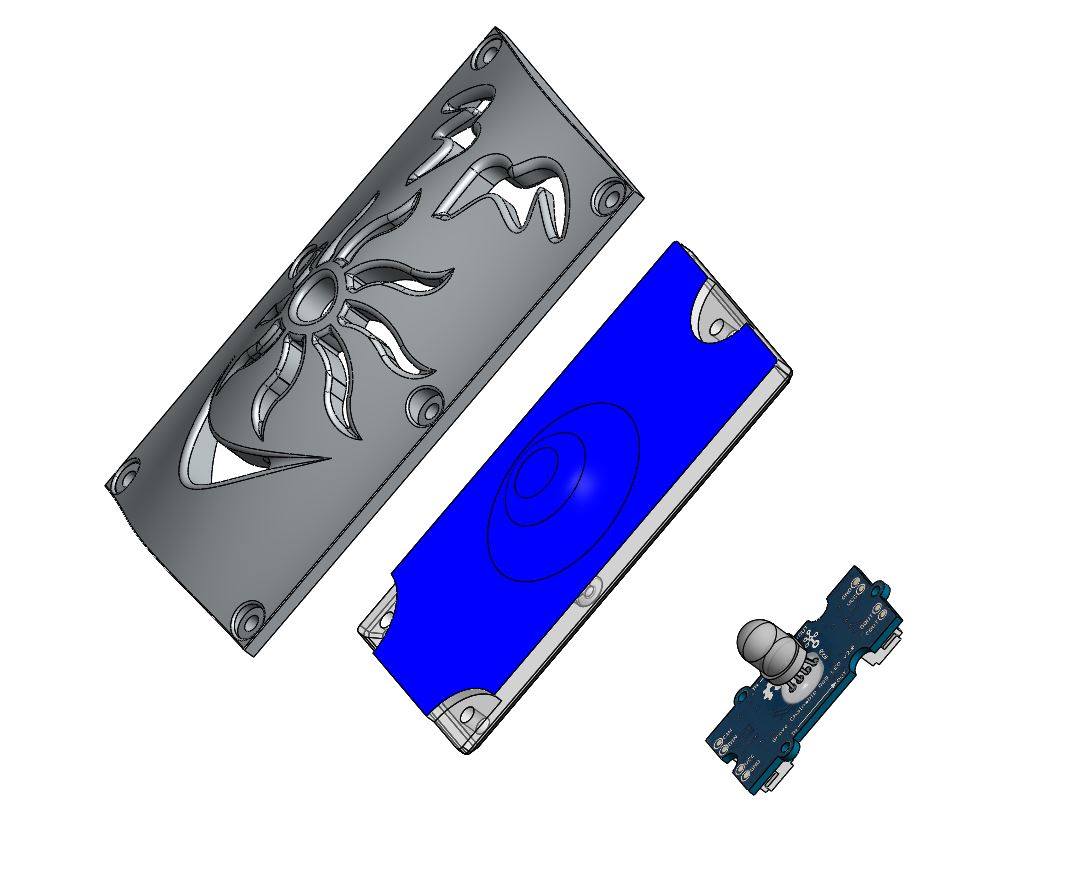
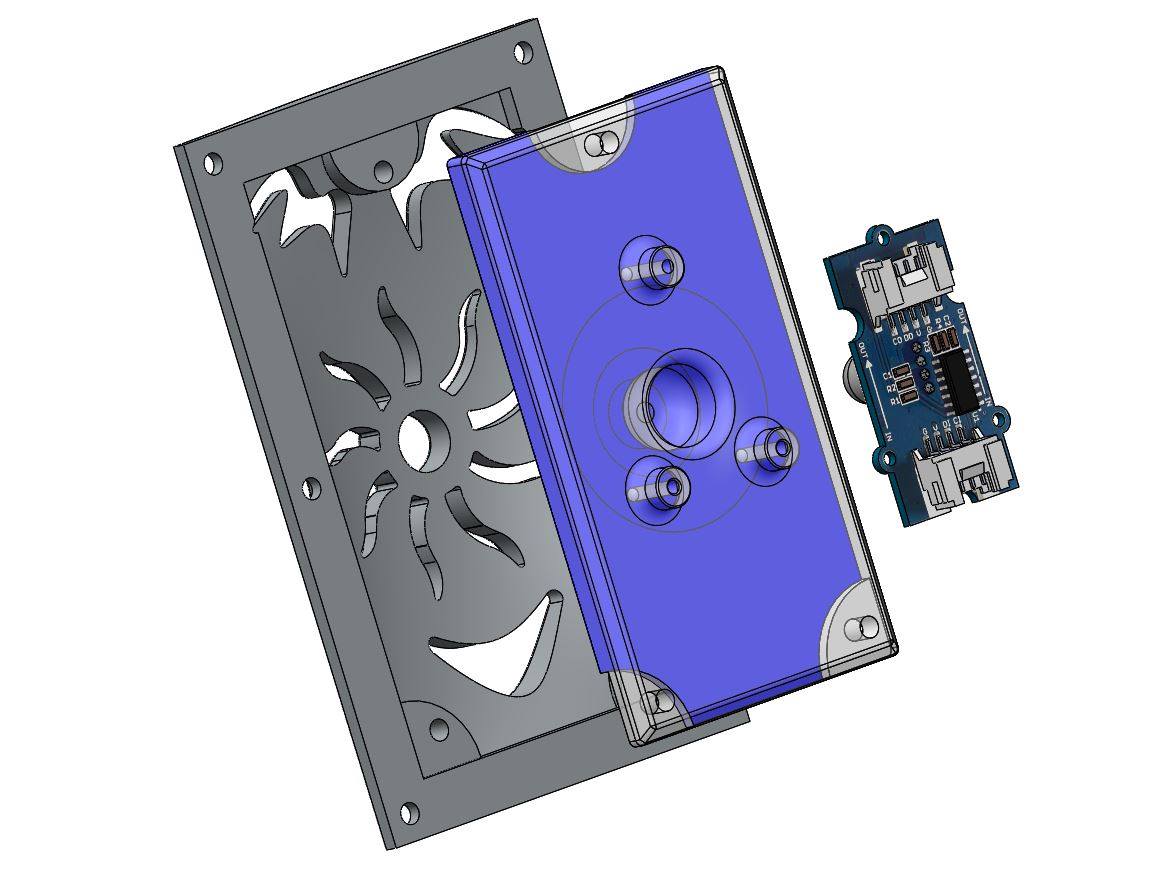
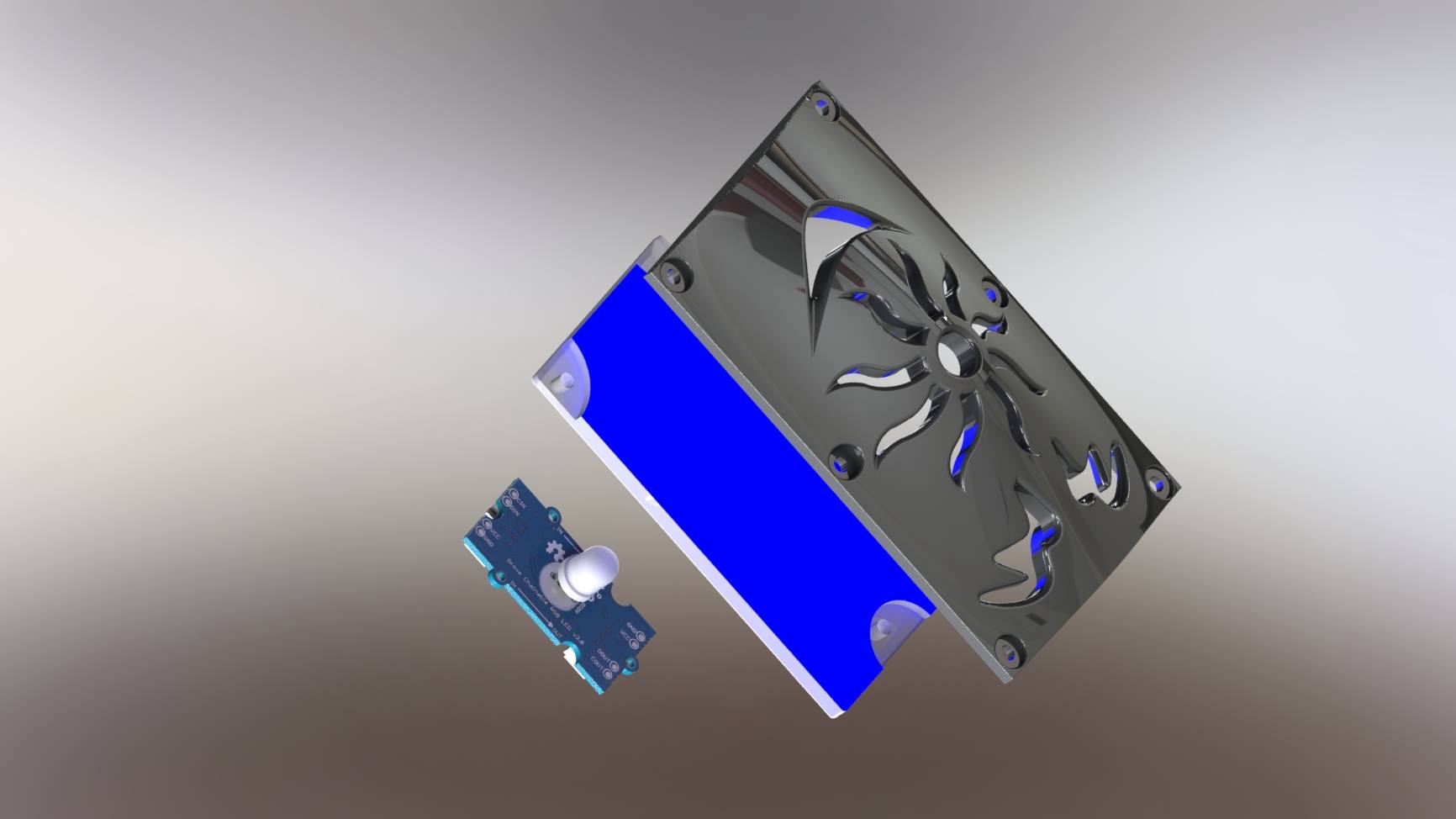
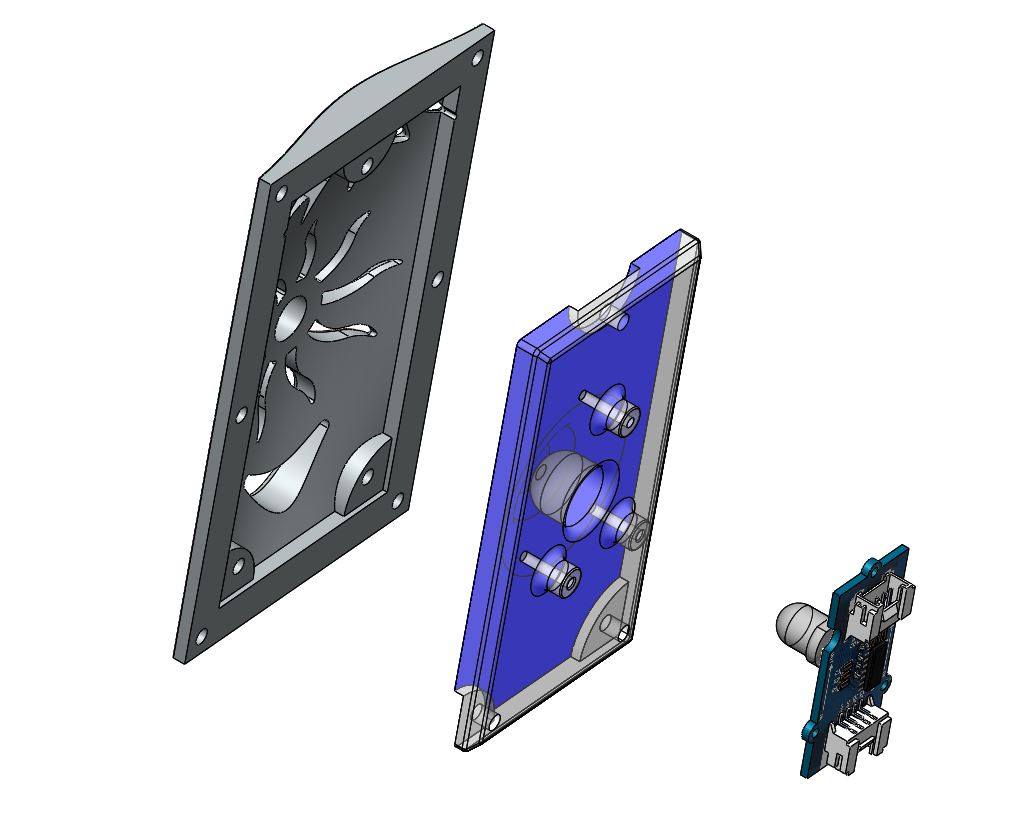
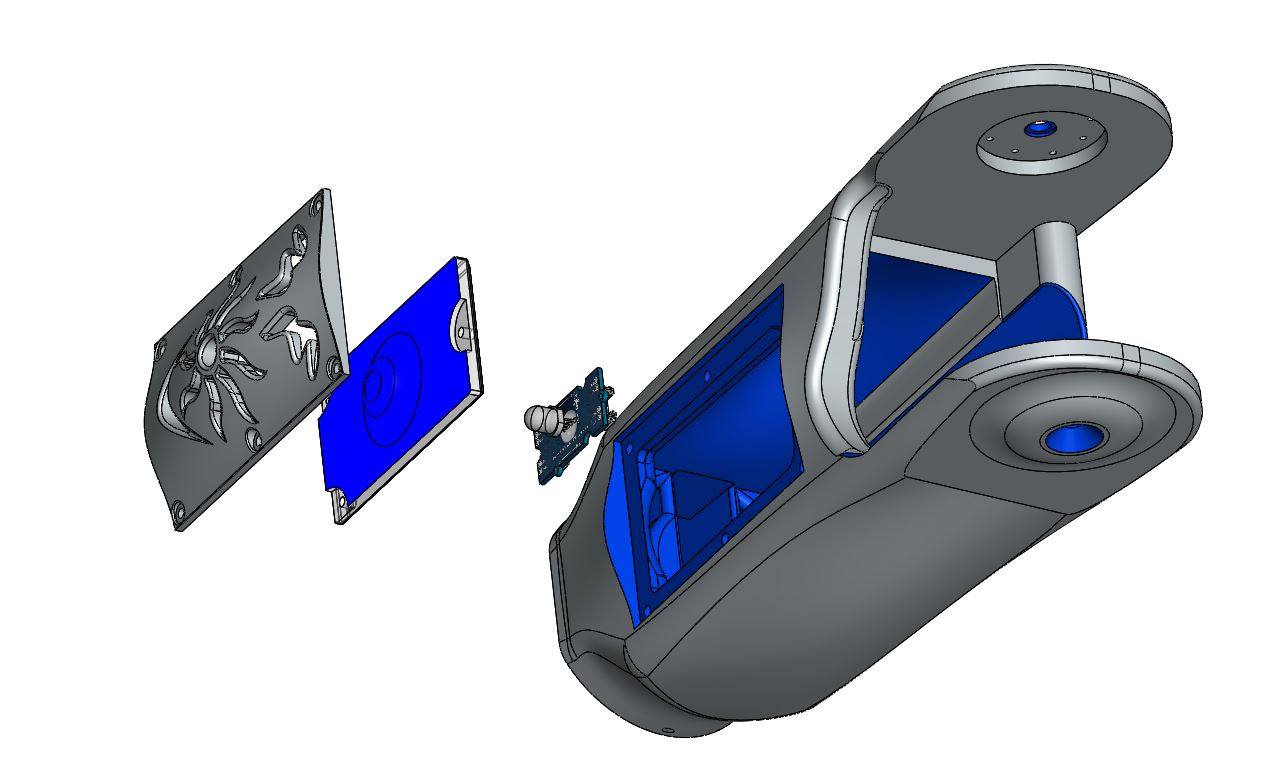
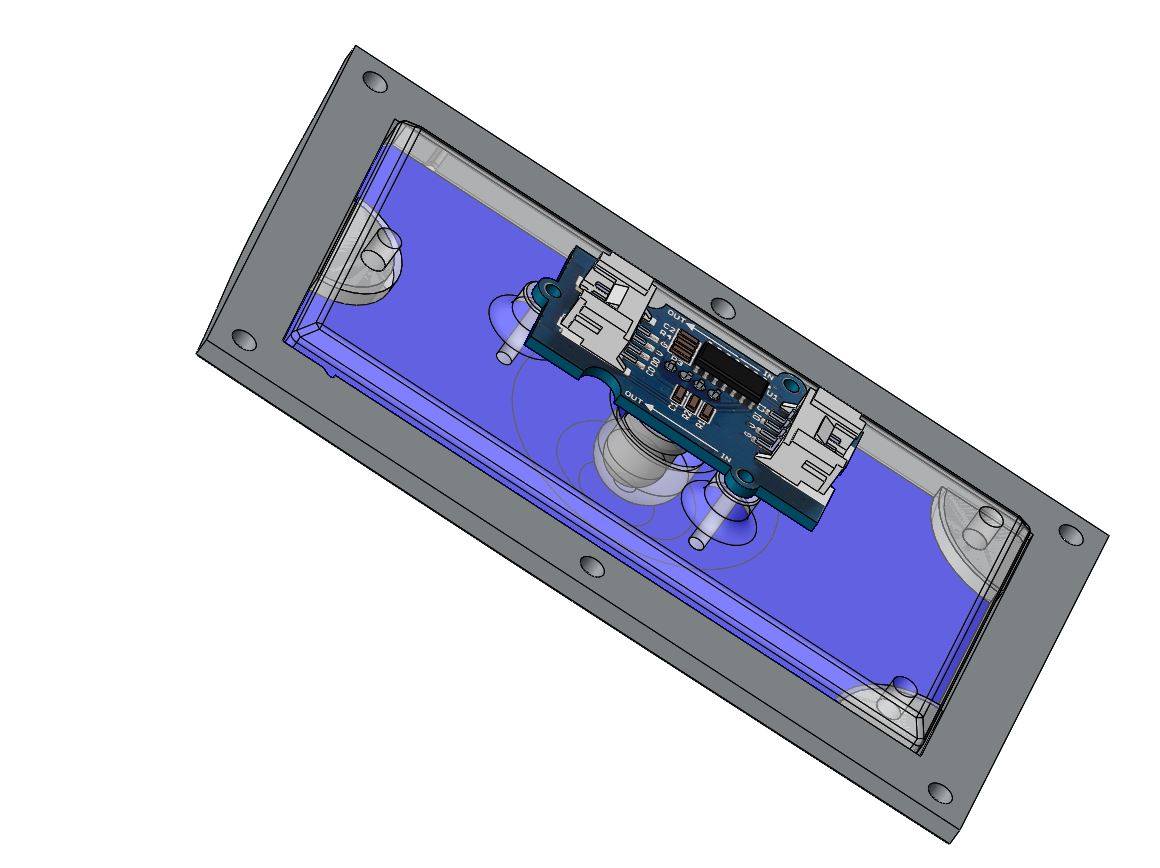
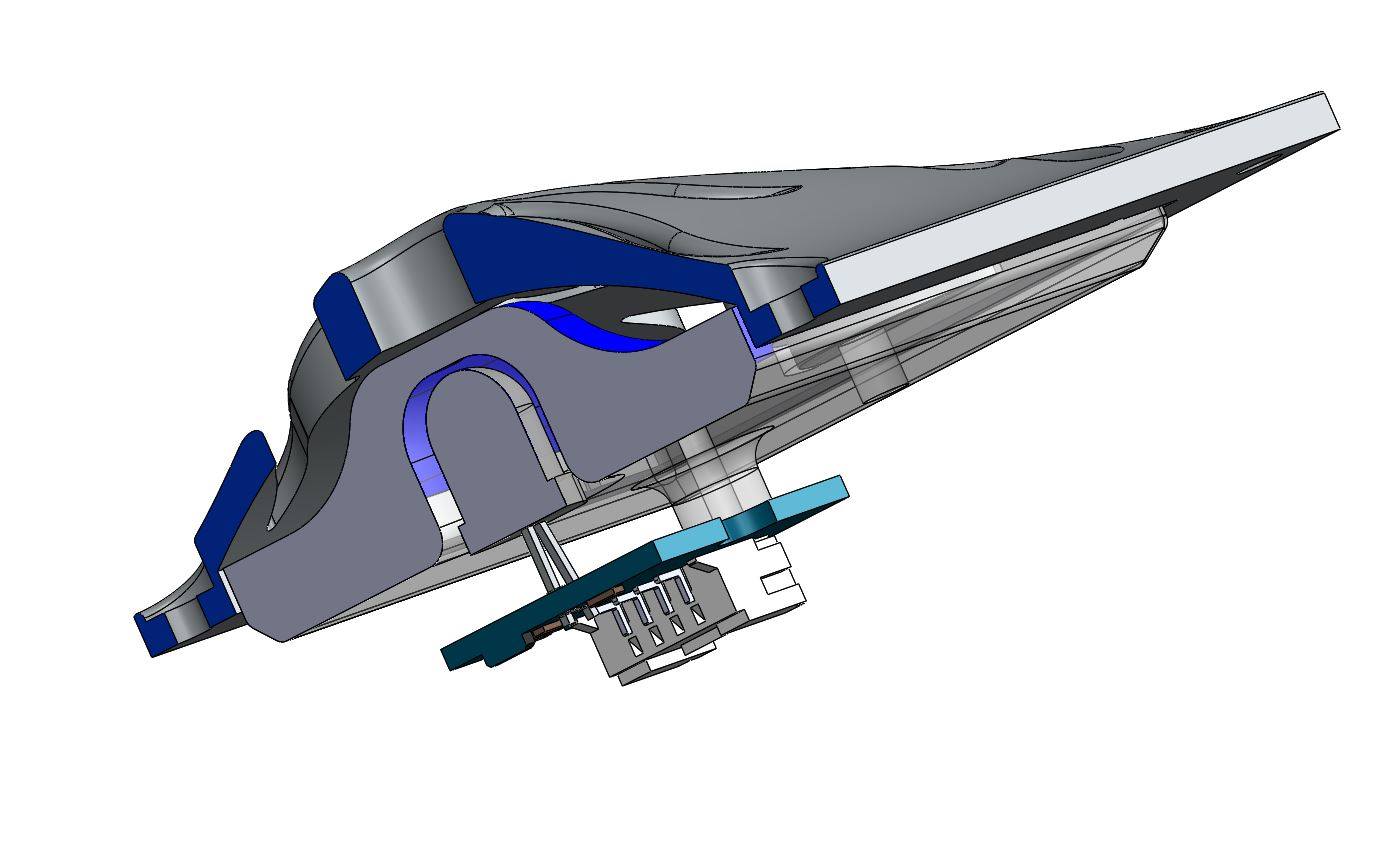
09/04/2018 : Modification de l’avant-bras du robot Maya
|
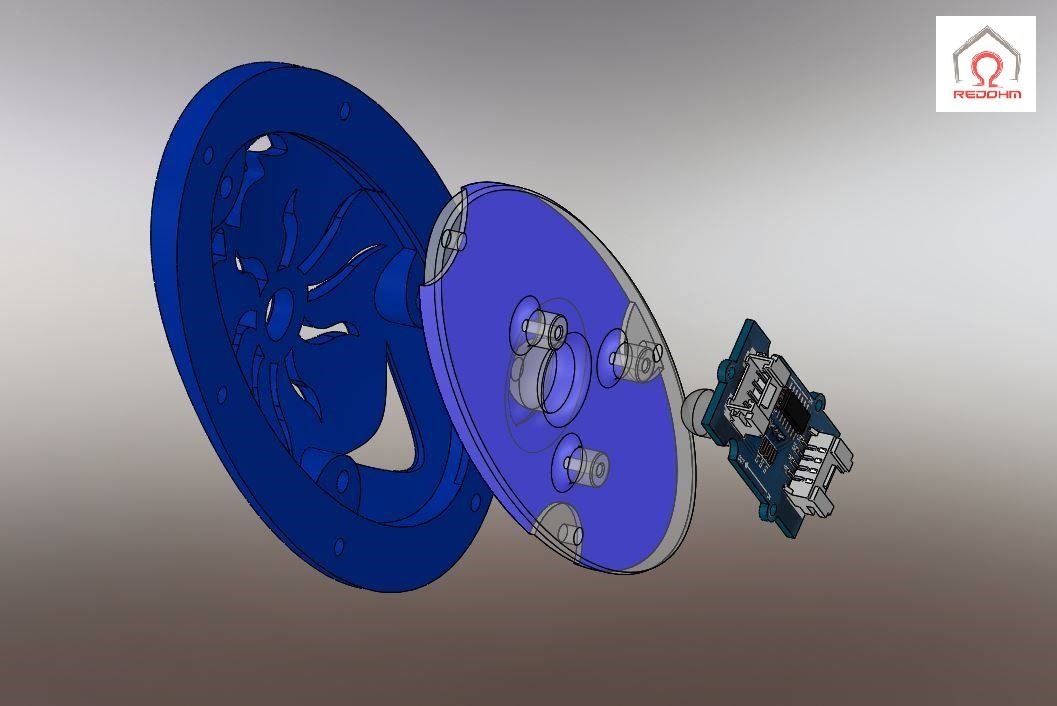
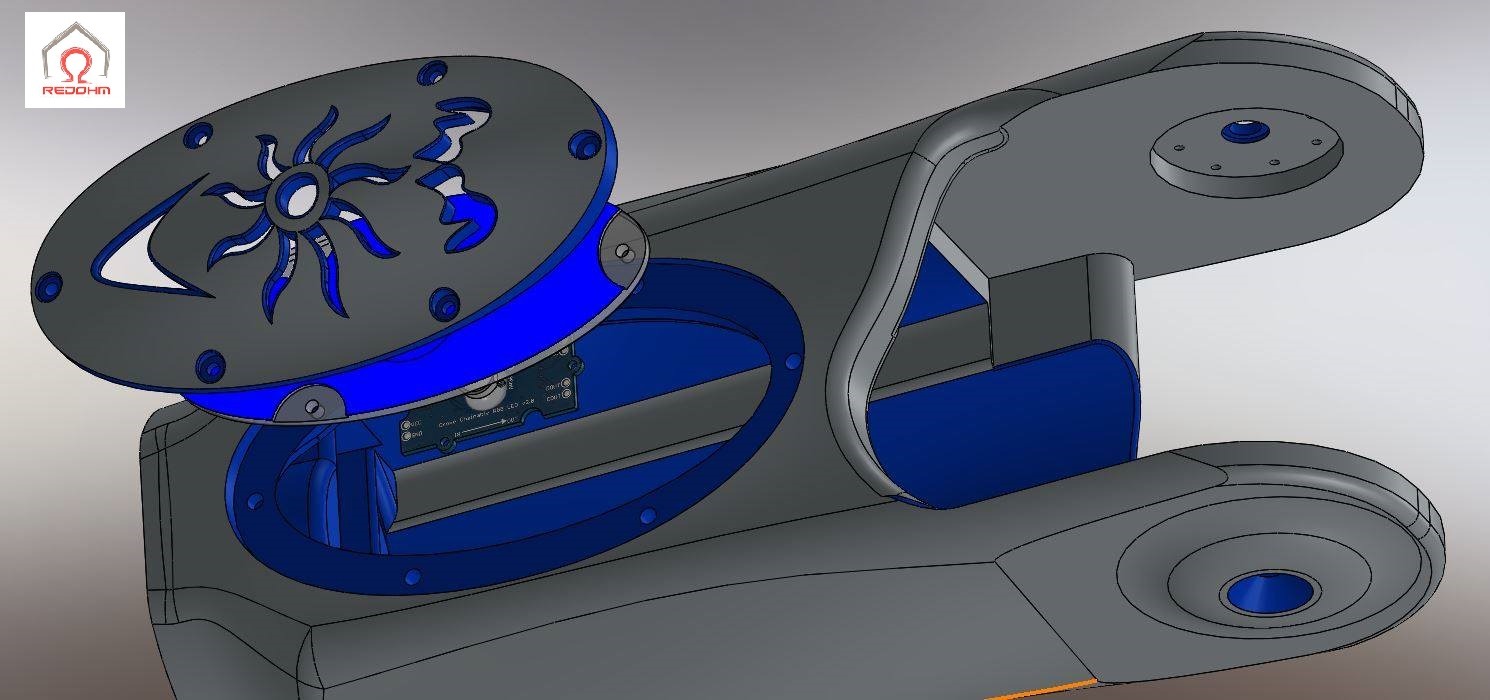
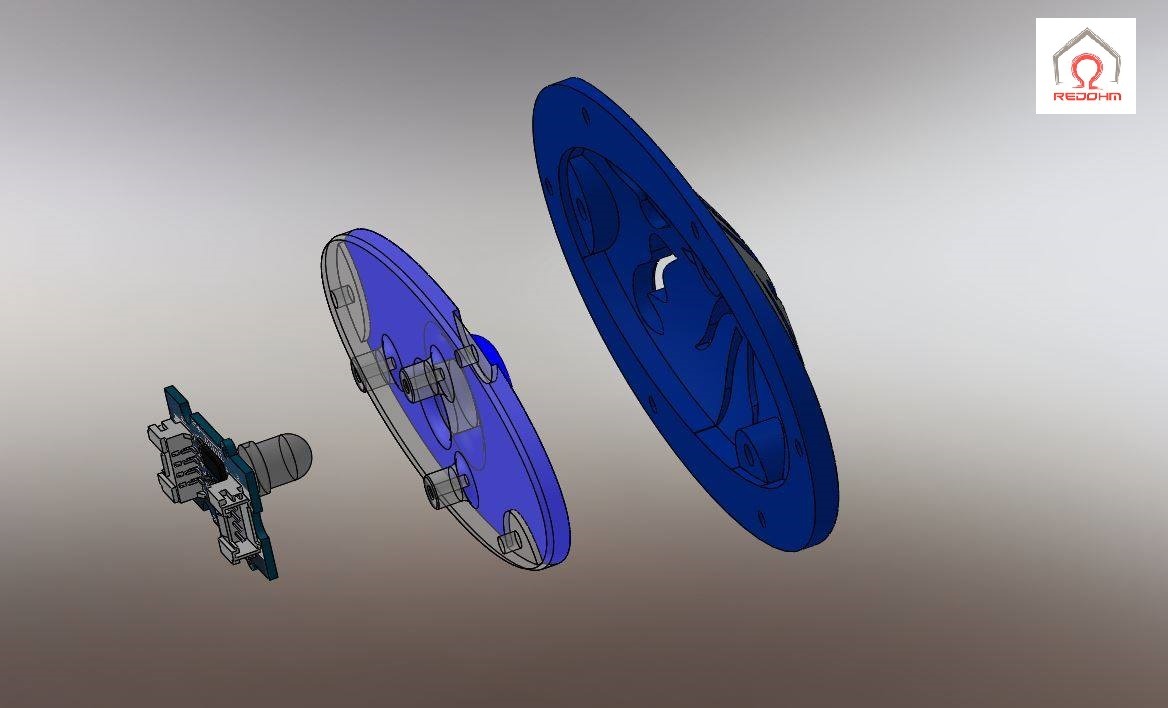
Nous avons redessiné une nouvelle trappe de visite pour l’avant-bras du robot Maya, pourquoi ce changement ? nous nous sommes aperçus lors de l’impression 3D que la partie rectangulaire est beaucoup plus difficile à démouler. Nous avons donc pris la décision de changer la forme de la trappe et nous avons opté pour une ellipse ce qui entraîne moins de supports pour sa réalisation lors de l’impression 3D. Il va sans dire que le résultat brut d’impression est nettement mieux fini. De plus, le rendu visuel final se marie nettement mieux avec les courbes de l’avant-bras de Maya. Mais vous trouverez sur notre site les deux versions de trappe et d’avant-bras.
Etude de l’avant bras de Maya avec une trappe de visite ovale |
||
 |
 |
 |
 |
 |
|
Réalisation de l’impression 3D de l’avant bras de Maya avec sa trappe de visite |
||
 |
 |
 |
| Retour au sommaire |
![]()
![]()