
***
Archive de l’article : ROBOT MAYA – Module Ez-Robot pour le pilotage de Maya avec Arduino derniere remise à jour le 11/02/2017 . Chez RedOhm , nous avons pris l’habitude de consever les anciennes notices de logiciel ou de matériel .Voici donc une version que nous utilisions pour la période 2016 à septembre 2017. Cette version est la version logiciel 2016–06–11–00.
Sommaire :
- Présentation du module Ez-Robot
- Caractéristiques
- Premiers essais du pilotage de la tête
- Schéma de câblage pour le contrôle de la tete
- Camera de tracking
- Installation du bloc de tracking

Ez-Robot une des interfaces pour le pilotage de Maya
Présentation
Caractéristiques:
- Alimentation à prévoir: 9 Vcc (6 piles AA non incluses)
- 8 entrées analogiques
- 24 E/S digitales (dont PWM, ports série et commandes servos)
-
3 ports I2C
-
Processeurs: Cortex M3 ARM 120 MHz et Microchip PIC32 80 MHZ
-
Fréquence de fonctionnement: 120 MHz + 80 MHz
-
wifi: Hoc, infrastructure, WEP, WPA et WPA2
-
Fusible réarmable
-
Dimensions avec socle: 70 x 67 x 56 mm
![]()
Premiers essais du pilotage de la tête
|
Schéma électrique du module EZ-Robot
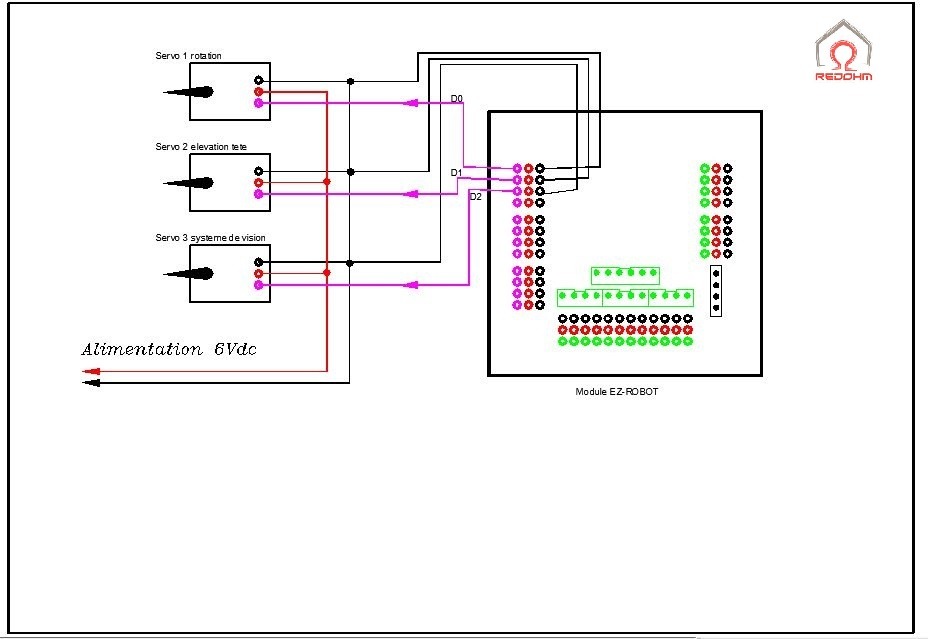
Maya câblage du module EZ-Robot pour le pilotage de la tète RedOhm
–
Page d’accueil du soft :
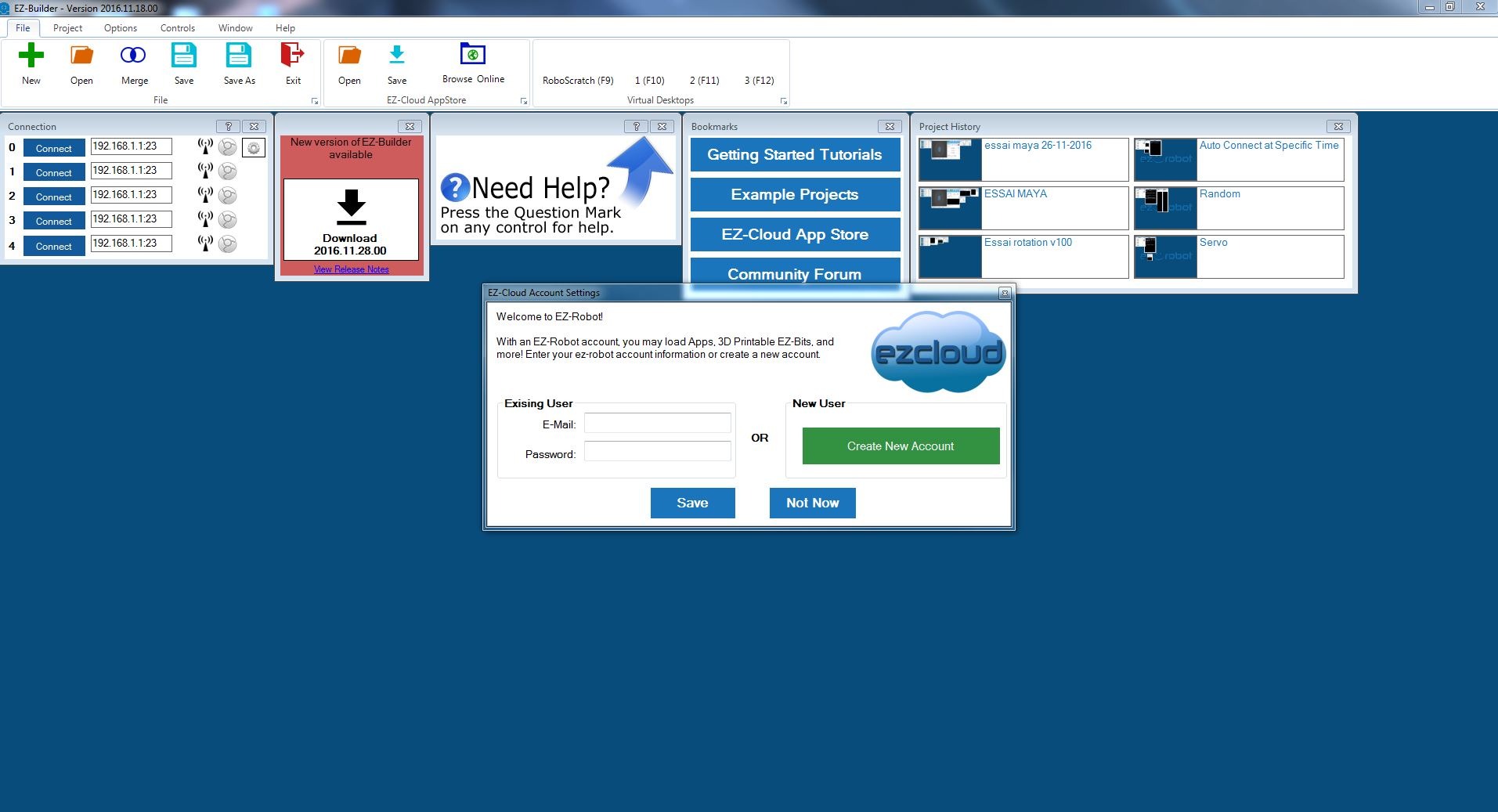
Page d’accueil du soft Ez-Robot
![]()
Bloc pour l’utilisation du système de tracking
- Installation du bloc de tracking
Installation du bloc de tracking .Validez sur l’icone en forme d’appareil photo ( RedOhm projet Maya )
Maya réglage du tracking – RedOhm -001
1) – Permet aux servomoteurs spécifiés de se déplacer pour suivre l’objet.
2) – Lorsque cette fonction est désactivée, les servomoteurs déplacent la caméra pour maintenir l’objet suivi centré dans la grille. S’il la fonction est activée, la poursuite suppose une caméra stationnaire et déplace les positions des servomoteurs par rapport à l’emplacement de l’objet suivi .
Ce réglage déplacera le servomoteur dans une position par rapport à l’objet détecté dans la vue de la caméra, pour «Track by relative positions», supposons que le servomoteur a une plage de 180 positions (min est 1 et max 180).
Si l’objet détecté se trouve à l’extrême gauche de la vue de la caméra, le servomoteur se positionne sur 1.
Si l’objet est à l’extrême droit de la vue de la caméra, le servomoteur se déplace à 180 degrés
Rappelez-vous que le réglage des positions relatives de la piste suppose que la caméra ne bouge pas.Vous suivez l’objet et déplacez les servomoteurs en fonction des positions relatives de l’objet dans la caméra.
3) – Si cette option est validée, la caméra pointe l’objet en utilisant les lignes de la grille. S’il elle n’est pas cochée ,le centrage de la caméra vers l’objet se coordonne avec le centre de l’image et les lignes de la grille sont ignorées.
Remarque : Cette option n’a pas d’incidence lorsque la fonction position relative est activée (repère 2)
4) – Définit la vitesse de déplacement des servomoteurs.
5) – Fonction à définir
10) – Choix du type d’orientation de votre caméra .
![]()
Pour plus d’information sur le matériel , visitez le site du constructeur : Ez-Robot
![]()