
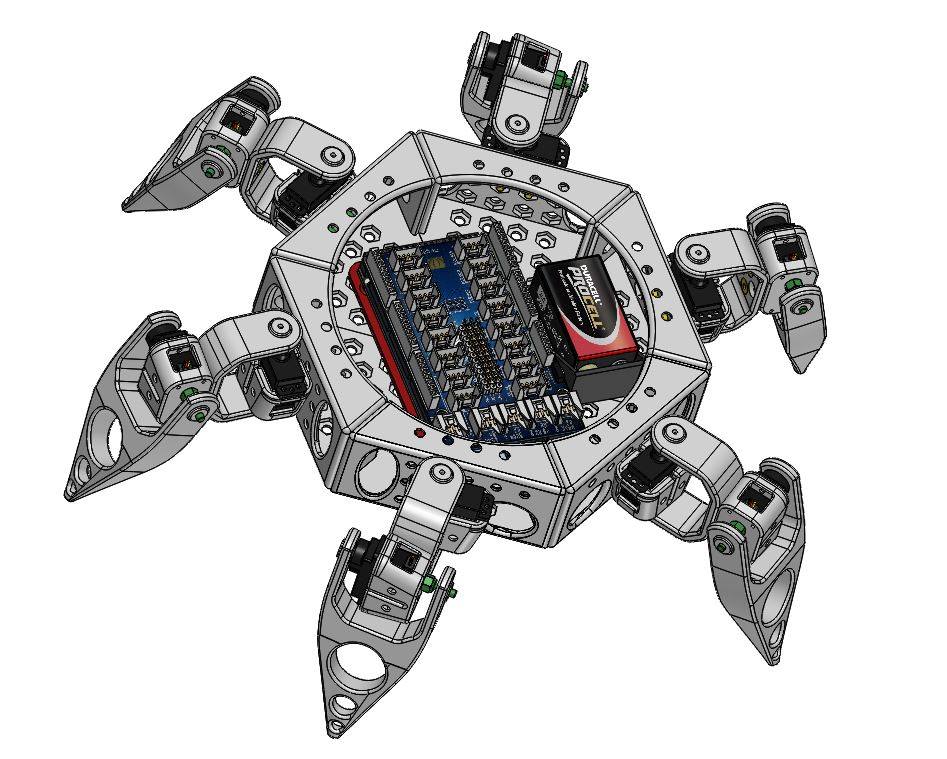
Mise à jour le 29/06/2019: Retrouvez sur cette page l’ensemble des articles concernant le robot Spider S12-PC ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )
Mini Spider S12 patte courte Version 02022017 – RedOhm
Sommaire :
- Version 1.00 ou Version 02-02-2017. Vue éclatée de mini Spider S12-PC pour le choix des pièce , ensemble des fichiers à télécharger .
- Version 09-02-2017 .Vue éclatée de mini Spider S12-PC pour le choix des pièce ensemble des fichiers à télécharger . ( Cette version est conseillée pour les néophytes de l’impression 3D ) .
- Fichier pour le porte batterie et capot
- Repérage des numéros des servomoteurs .
- Divers programmes .
- Programme de calibrage des moteurs ( Positionnement a 90° du servomoteur ).
- Programme d’initialisation de mini-spider et un petit bonjour
- Programme d’enchaînement de divers sous programme ( Initialisation spider , petit bonjour , position d’attaque de Spider ,rotation de Spider)
- Explication de l’alimentation des servomoteurs.
- Présentation de Mr le régulateur 7806 en boitier TO220.
- Retour au menu nos robots
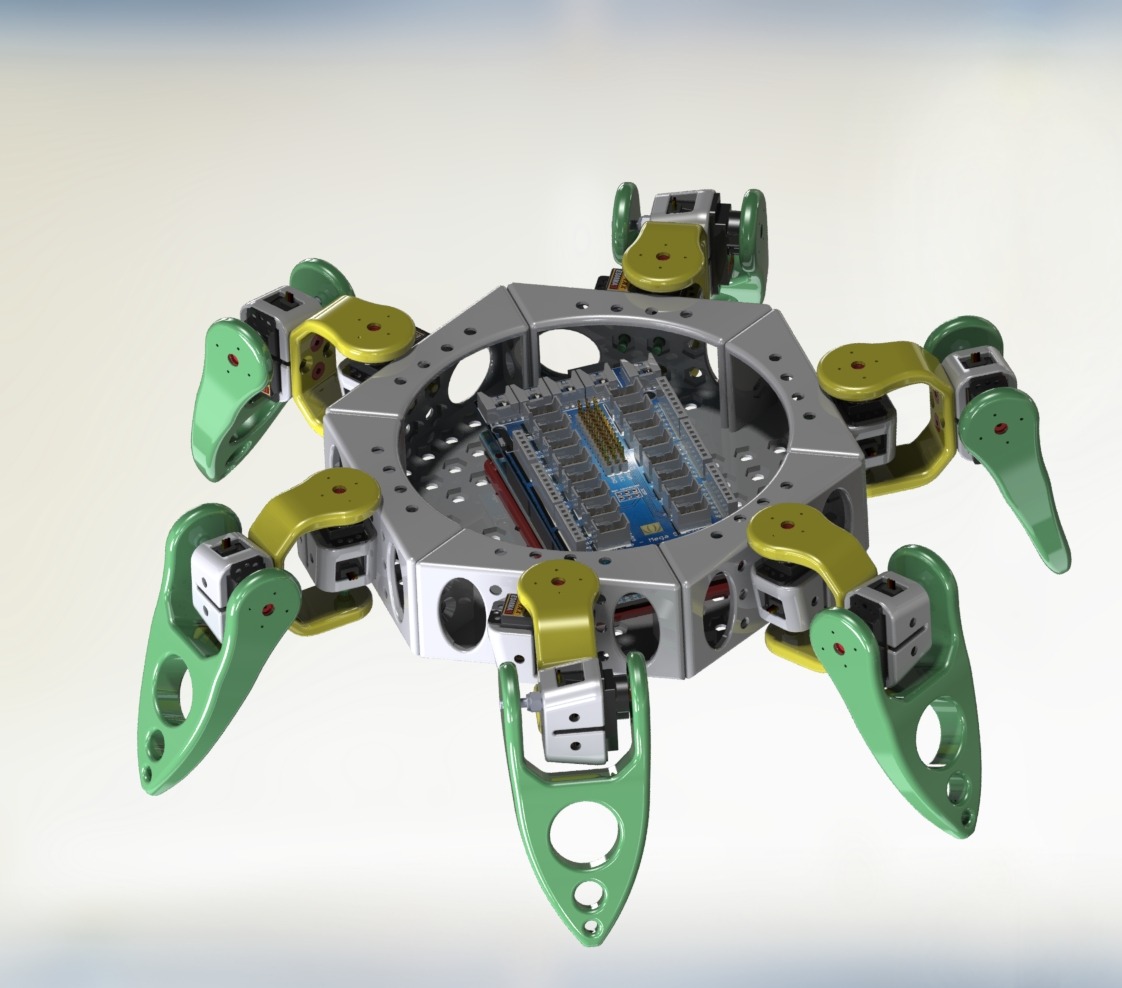
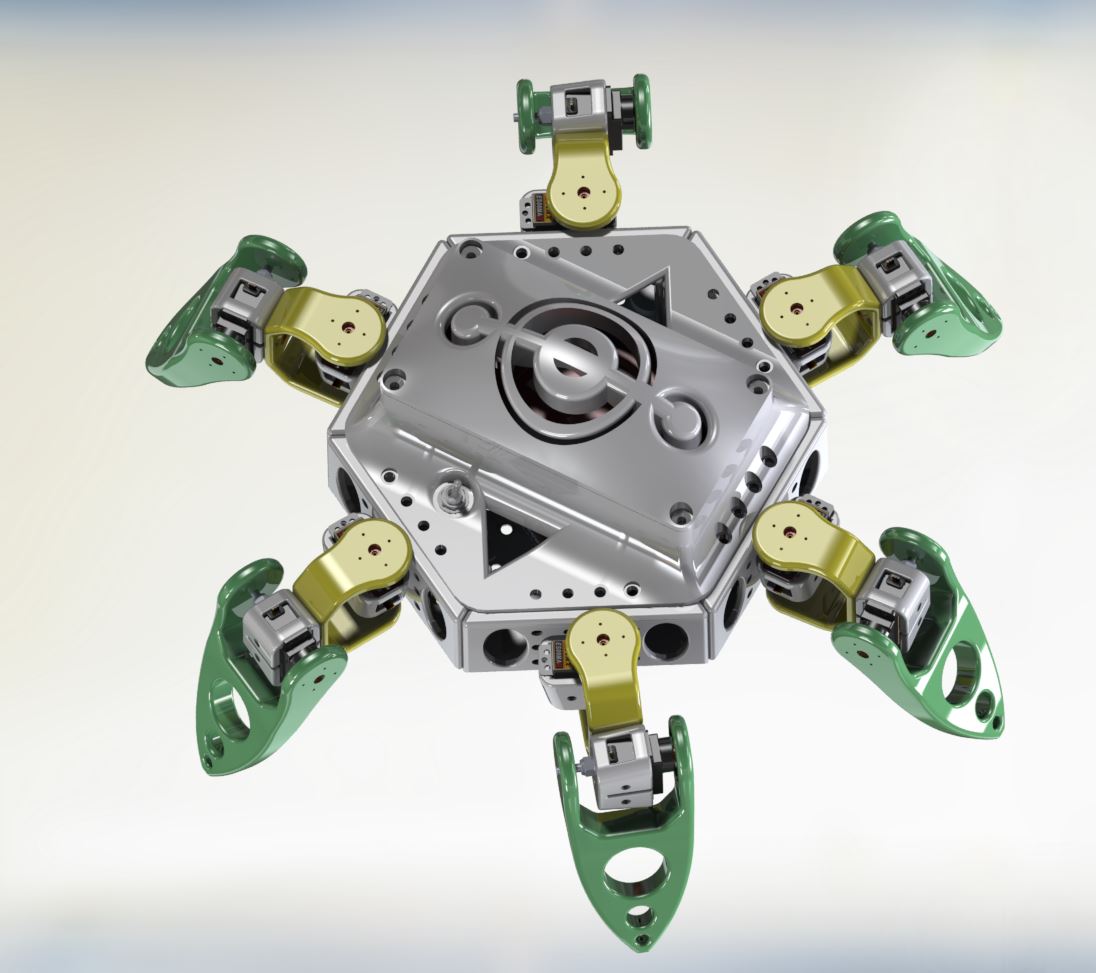
Vue éclatée de mini Spider S12-PC et l’ensemble des fichiers à télécharger . Version 1.00 |

Vue éclatée de mini Spider S12 Version 1.00 – RedOhm
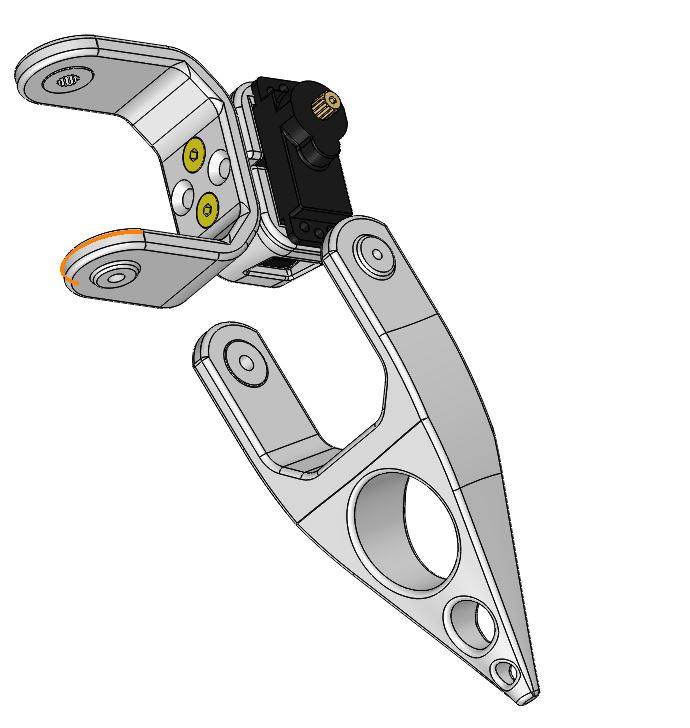
Vue de la patte et de son servomoteur – RedOhm –
Ensemble des fichiers à télécharger pour imprimer Spider version 1.00
–
Matériel utile :
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
- Alimentation: 4,8 à 6 Vcc
- Couple: 1,6 kg.cm à 4,8 Vcc
- Vitesse: 0,12 s/60° à 4,8 Vcc
- Dimensions: 24 x 12 x 29 mm
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
–
Retour au sommaire.
![]()
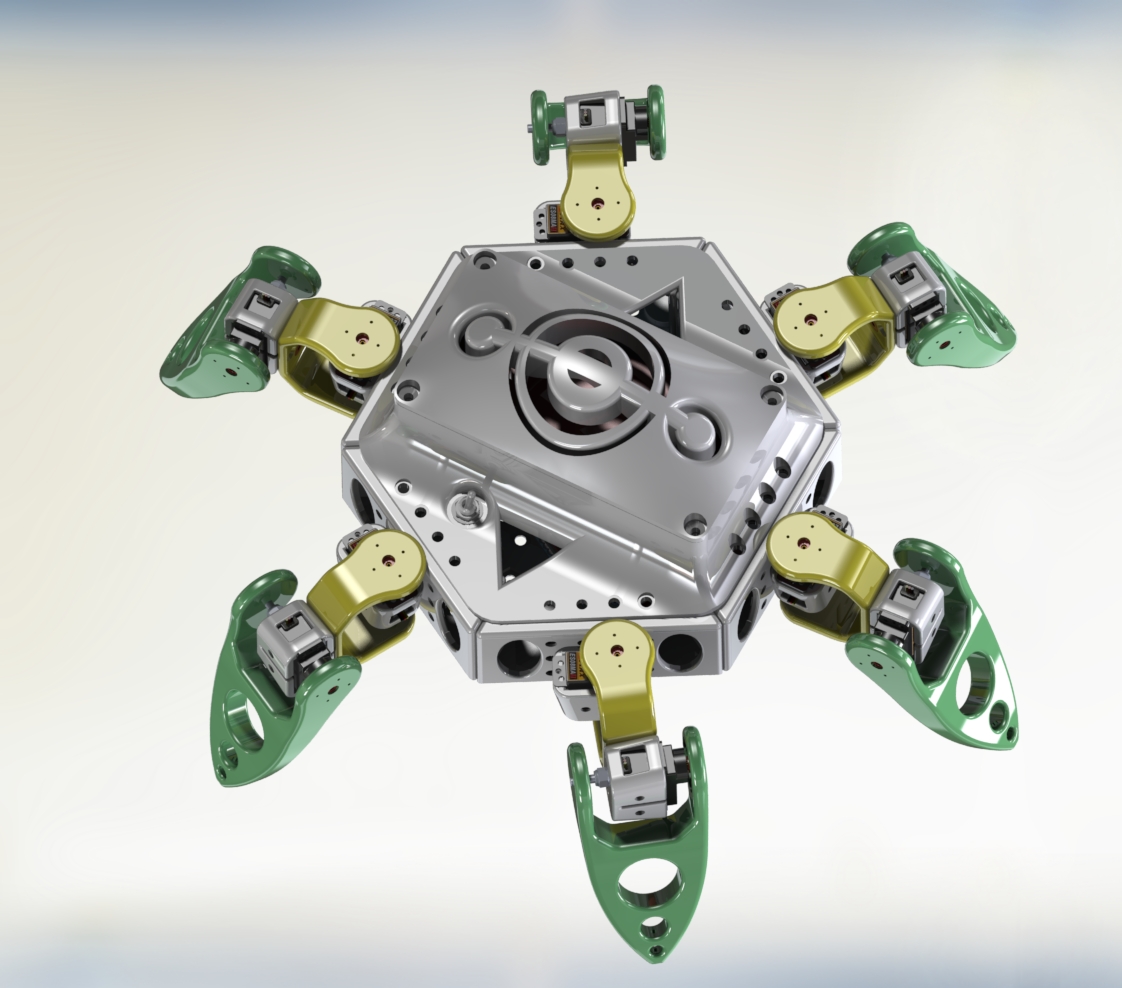
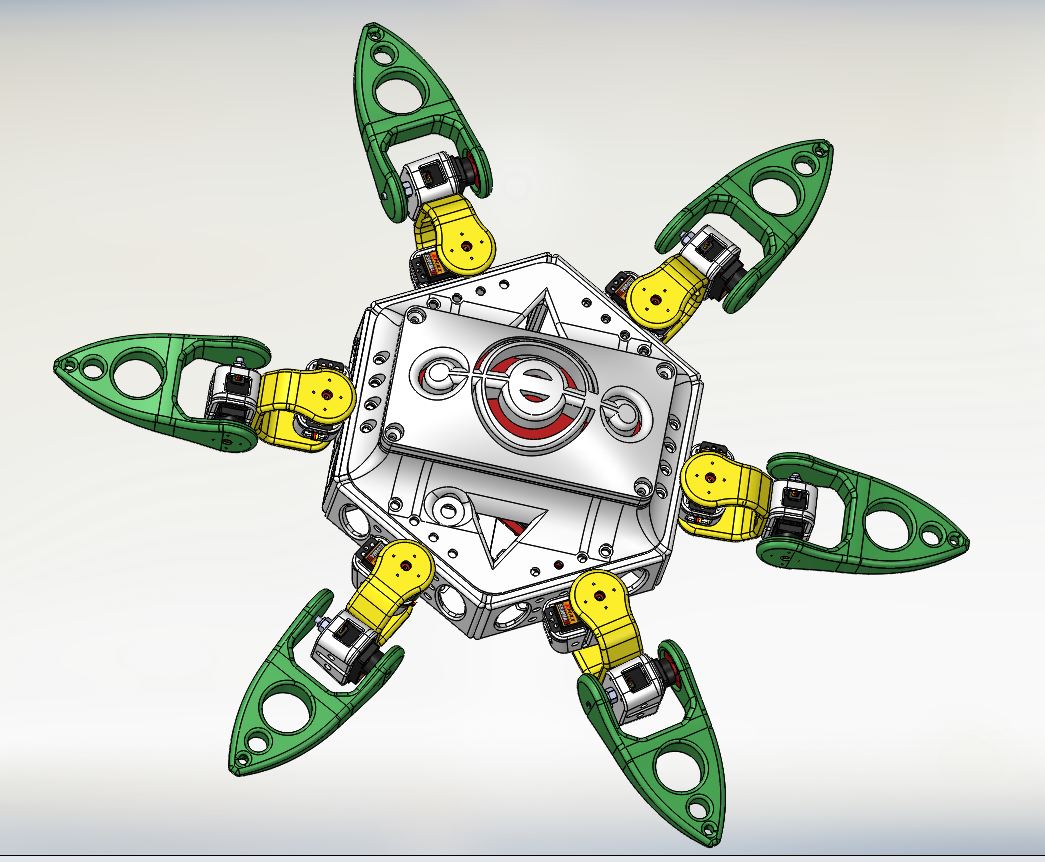
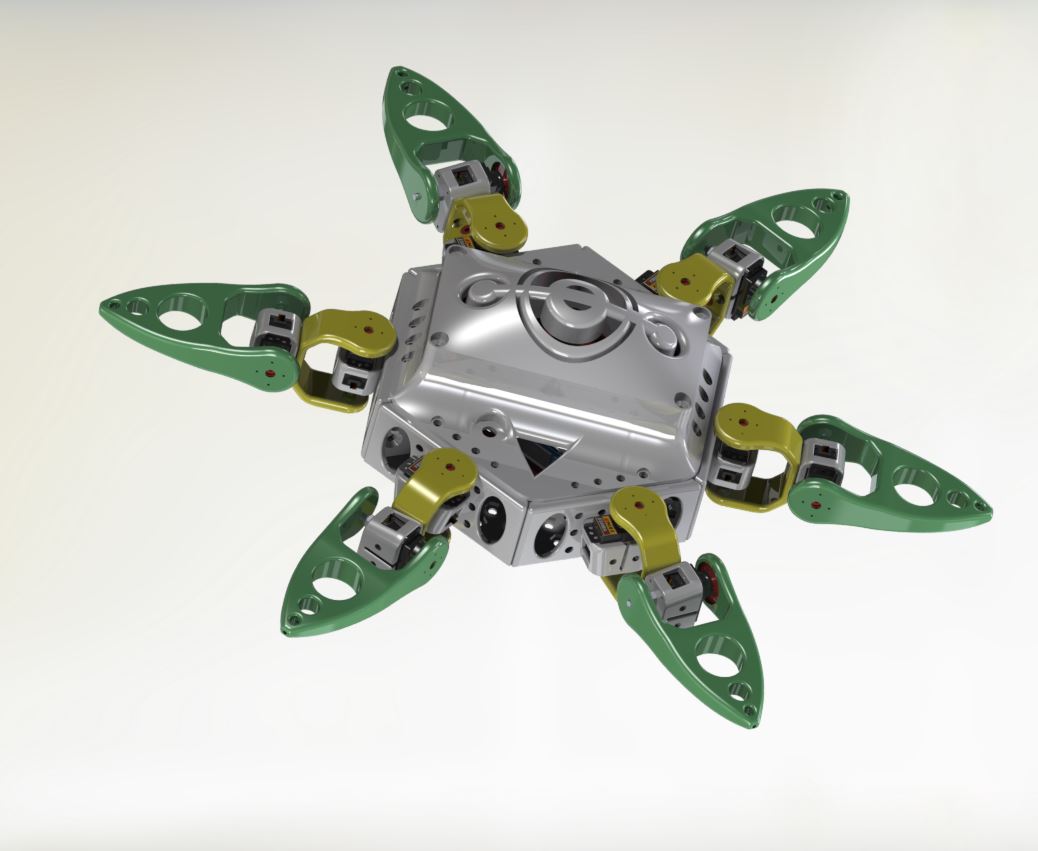
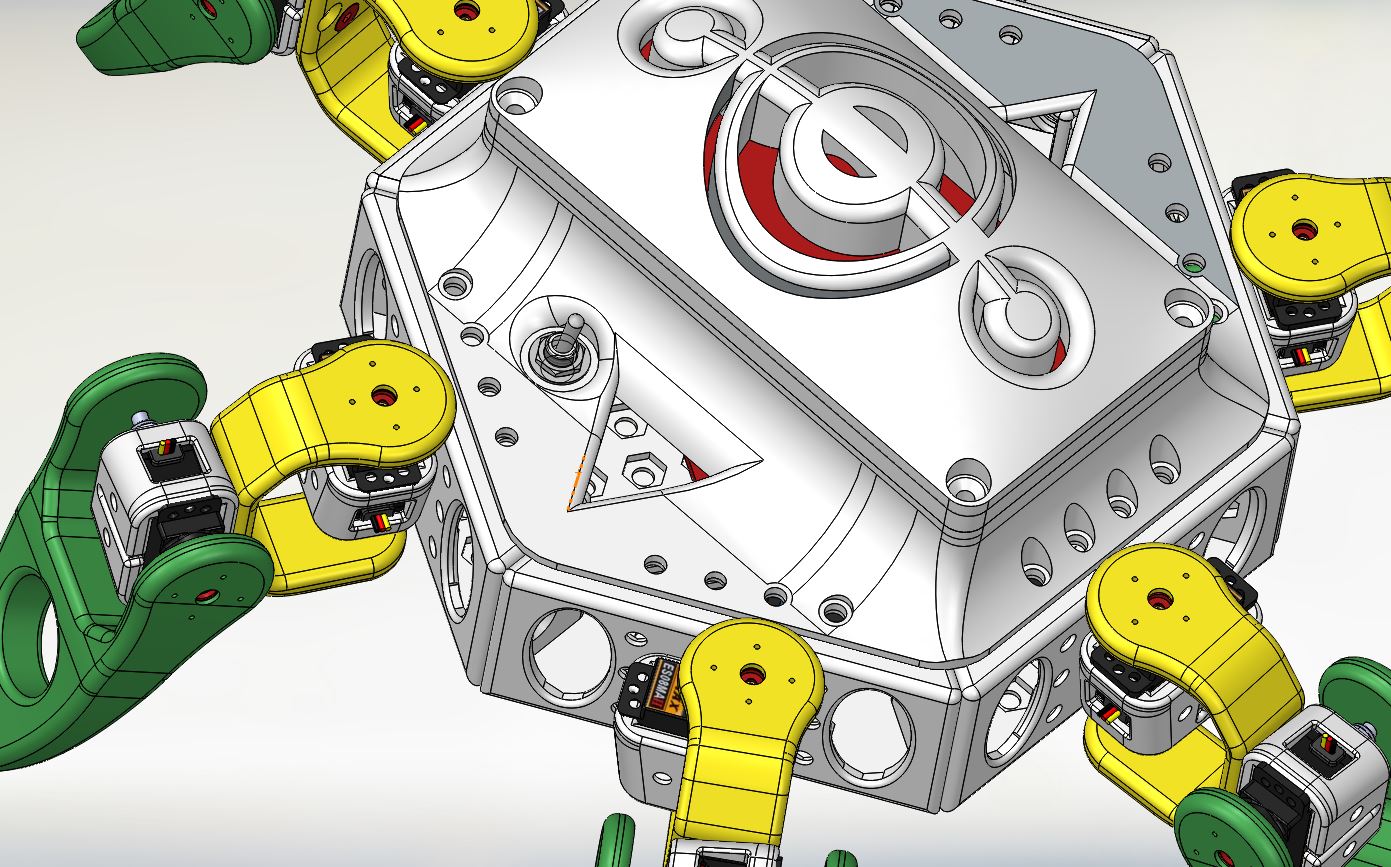
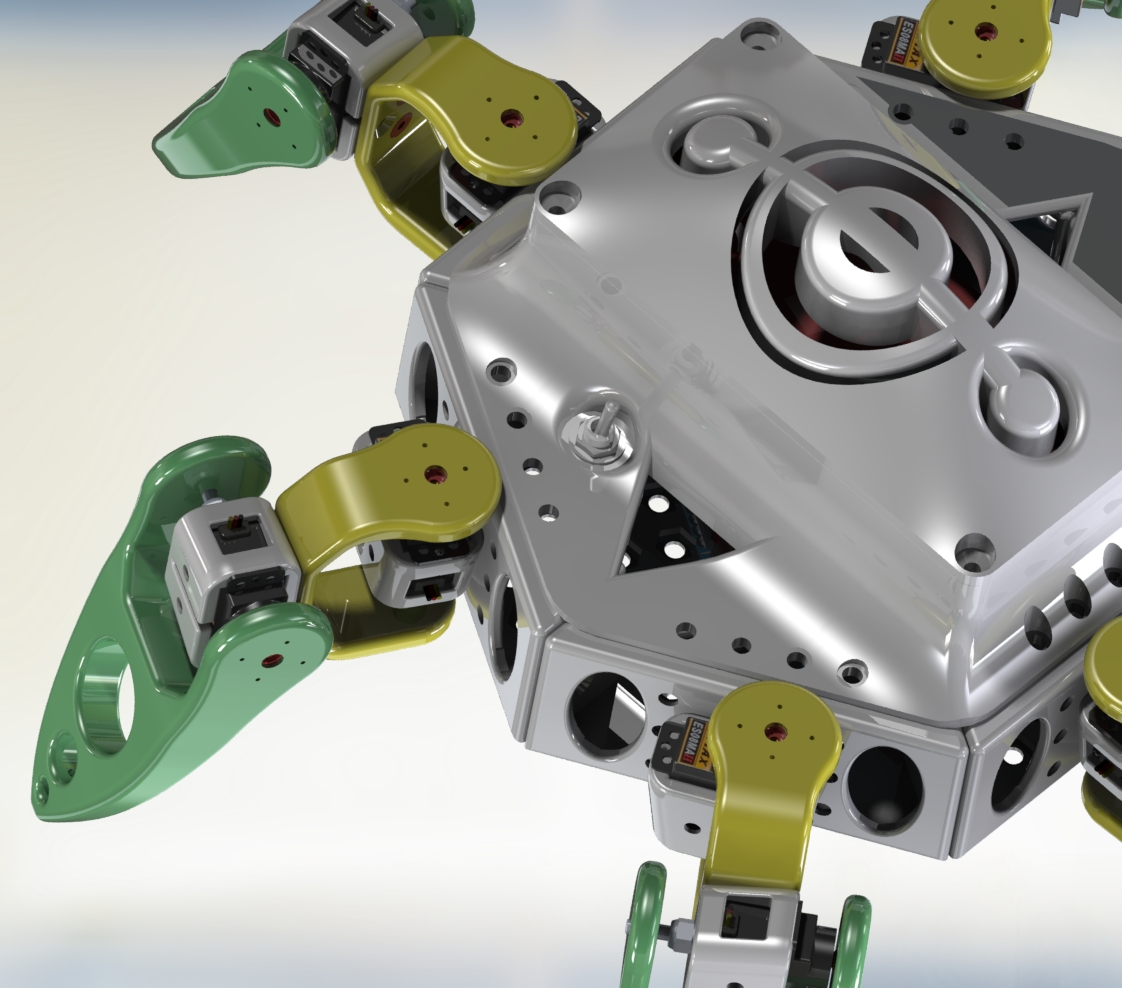
Vue éclatée de mini Spider S12-PC pour le choix des pièce et l’ensemble des fichiers à télécharger Version 09-02-2017 |
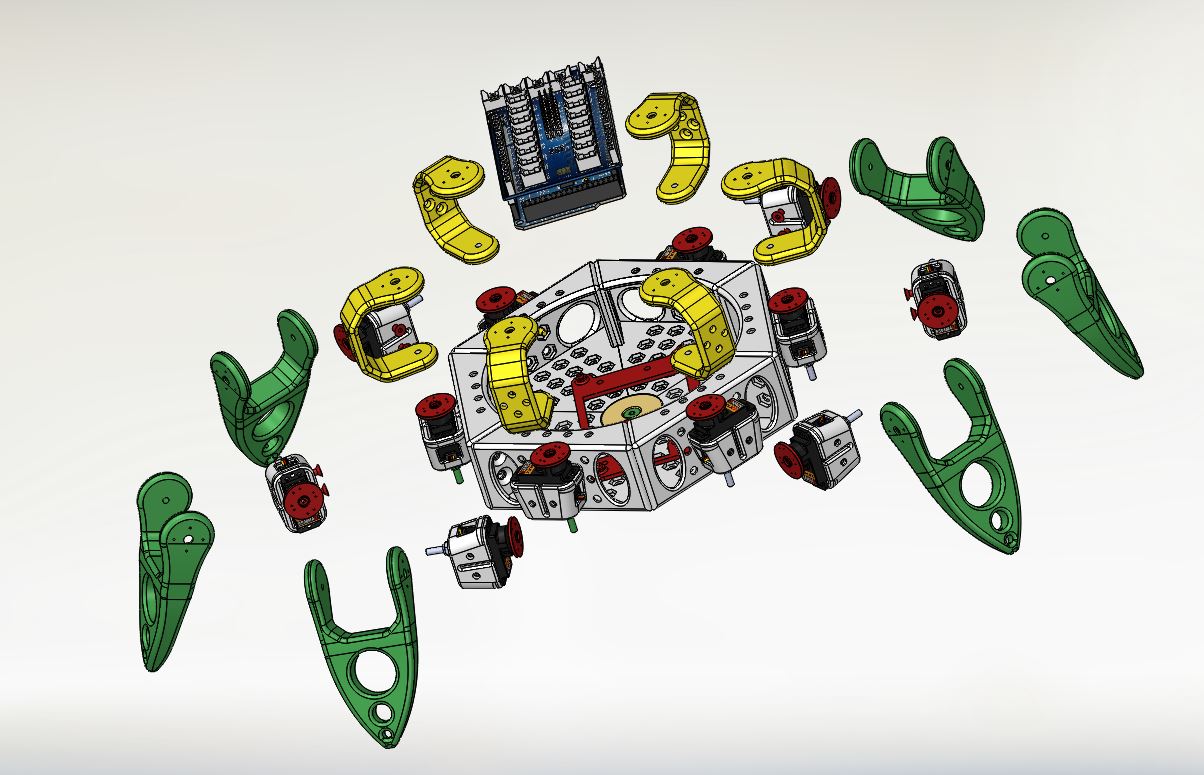
Spider version 09-02-2017 RedOhm – 001
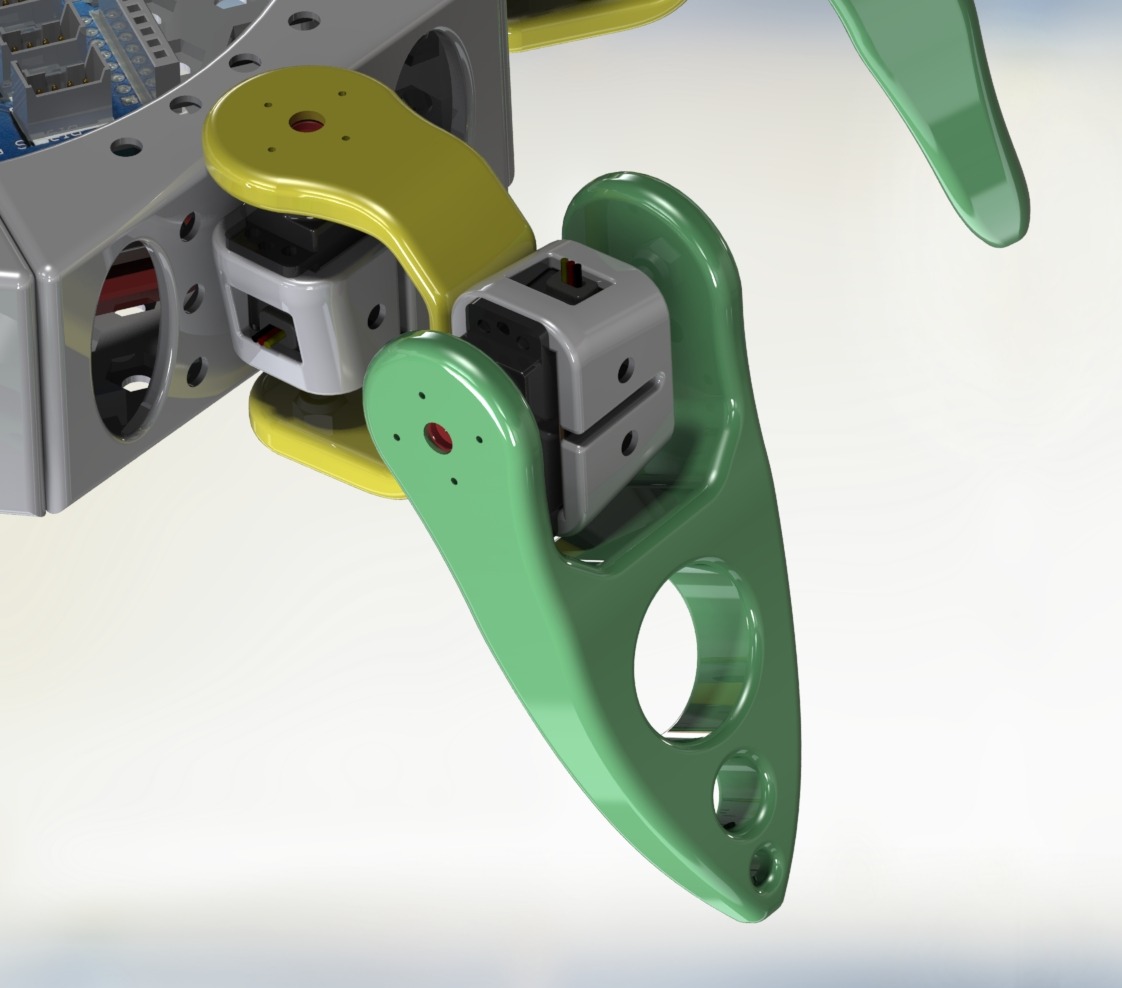
Spider version 09-02-2017 RedOhm – 002
Spider version 09-02-2017 RedOhm – 003
–
Ensemble des fichiers à télécharger pour imprimer Spider Version 2.00
–
Matériel utile :
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
- Alimentation: 4,8 à 6 Vcc
- Couple: 1,6 kg.cm à 4,8 Vcc
- Vitesse: 0,12 s/60° à 4,8 Vcc
- Dimensions: 24 x 12 x 29 mm
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
.
![]()
Porte batterie et capot |
.


.
Ensemble des fichiers à télécharger pour imprimer le capot et le porte batterie
–
Retour au sommaireRepérage des numéros des servomoteurs
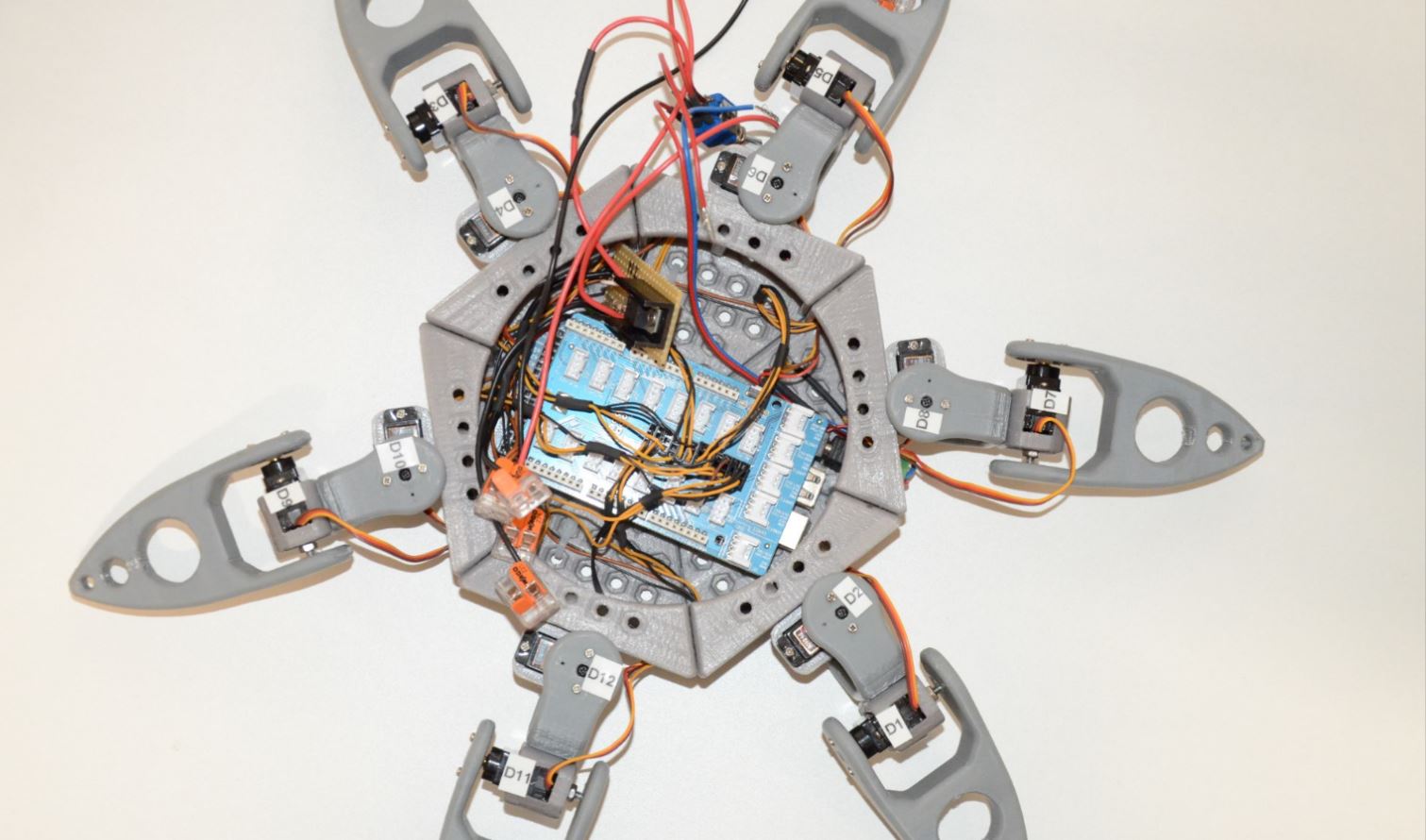
Robot Spider repérage RedOhm
–
Programme de calibrage des moteurs ( Positionnement a 90° du servomoteur )
Voici un petit programme pour Arduino permettant de positionner un servomoteur à 90°. Ce positionnement se produit quand on appuie sur le bouton poussoir , tant que celui-ci est sollicité le servomoteur conserve sa position, quand le bouton est relâché le servo est à nouveau libre.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 |
/* * RedOhm * * * Positionne un servomoteur à son centre * donc à 90° * * Le 06/12/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // le bouton est connecté à la broche 2 de la carte Arduino const int bouton=2; // Variable qui enregistre l'état du bouton int etatdubouton; /* * Un programme Arduino doit impérativement contenir cette fonction . * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { //le bouton est une entrée pinMode(bouton,INPUT); //on initialise l'état du bouton comme "relaché" etatdubouton=LOW; } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // lecture de l'etat du bouton etatdubouton=digitalRead(bouton); //test si le bouton a un niveau logique HAUT if (etatdubouton == HIGH) { // associe le servomoteur a la broche 3 monservo.attach(3); // Positionne mon servomteur a 90 monservo.write(90); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } else { // Dissocie la variable monservo de sa broche monservo.detach(); } } |
–
Retour au sommaire![]()
Programme d’initialisation de mini-spider et un petit bonjour
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 |
/* * * * RedOhm * * Initialisation de mini spider * * but : les pattes en bas et droite * enfin un petit bonjour pour nous confirmer * que le robot est en attente * * * Le 28/01/2017 * H-Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> //Crée un objet de type "Servo", nommé -> servo_d1 Servo servo_d1; //Crée un objet de type "Servo", nommé -> servo_d2 Servo servo_d2; //Crée un objet de type "Servo", nommé -> servo_d3 Servo servo_d3; //Crée un objet de type "Servo", nommé -> servo_d4 Servo servo_d4; //Crée un objet de type "Servo", nommé -> servo_d5 Servo servo_d5; //Crée un objet de type "Servo", nommé -> servo_d6 Servo servo_d6; //Crée un objet de type "Servo", nommé -> servo_d7 Servo servo_d7; //Crée un objet de type "Servo", nommé -> servo_d8 Servo servo_d8; //Crée un objet de type "Servo", nommé -> servo_d9 Servo servo_d9; //Crée un objet de type "Servo", nommé -> servo_d10 Servo servo_d10; //Crée un objet de type "Servo", nommé -> servo_d11 Servo servo_d11; //Crée un objet de type "Servo", nommé -> servo_d12 Servo servo_d12; // variable du type int pour les deplacement des servomoteurs // a droite int initd=5; // variable du type int pour les deplacement des servomoteurs // a gauche int initg=5; // variable du type int pour les boucle for int x; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // associe le servomoteur a la broche 2 servo_d1.attach(2,700,2000); // associe le servomoteur a la broche 3 servo_d2.attach(3,700,2000); // associe le servomoteur a la broche 4 servo_d3.attach(4,700,2000); // associe le servomoteur a la broche 5 servo_d4.attach(5,700,2000); // associe le servomoteur a la broche 6 servo_d5.attach(6,700,2000); // associe le servomoteur a la broche 7 servo_d6.attach(7,700,2000); //associe le servomoteur a la broche 8 servo_d7.attach(8,700,2000); //associe le servomoteur a la broche 9 servo_d8.attach(9,700,2000); //associe le servomoteur a la broche 10 servo_d9.attach(10,700,2000); //associe le servomoteur a la broche 11 servo_d10.attach(11,700,2000); //associe le servomoteur a la broche 12 servo_d11.attach(12,700,2000); //associe le servomoteur a la broche 13 servo_d12.attach(13,700,2000); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(500); // lancement d'un petit bonjour servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); delay(200); servo_d1.write (5); delay(500); servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); servo_d1.write (5); } // fin du bonjour //Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { } // Initialisation spider void initialisation() { // position des pattes en bas initd=5; initg=175; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); } |
Retour au sommaire
.
![]()
Programme enchaînement de divers sous programme 002
- Initialisation spider
- Petit bonjour
- Position d’attaque de Spider
- Rotation de Spider
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 |
/* * * * RedOhm * * Programme enchaînement de divers sous programme * * Initialisation spider * Petit bonjour * Position d'attaque de Spider * Rotation de Spider * * Le 18/02/2017 * H-Mazelin * */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> //Crée un objet de type "Servo", nommé -> servo_d1 Servo servo_d1; //Crée un objet de type "Servo", nommé -> servo_d2 Servo servo_d2; //Crée un objet de type "Servo", nommé -> servo_d3 Servo servo_d3; //Crée un objet de type "Servo", nommé -> servo_d4 Servo servo_d4; //Crée un objet de type "Servo", nommé -> servo_d5 Servo servo_d5; //Crée un objet de type "Servo", nommé -> servo_d6 Servo servo_d6; //Crée un objet de type "Servo", nommé -> servo_d7 Servo servo_d7; //Crée un objet de type "Servo", nommé -> servo_d8 Servo servo_d8; //Crée un objet de type "Servo", nommé -> servo_d9 Servo servo_d9; //Crée un objet de type "Servo", nommé -> servo_d10 Servo servo_d10; //Crée un objet de type "Servo", nommé -> servo_d11 Servo servo_d11; //Crée un objet de type "Servo", nommé -> servo_d12 Servo servo_d12; // variable du type int pour les deplacement des servomoteurs // a droite int initd=5; // variable du type int pour les deplacement des servomoteurs // a gauche int initg=5; // variable du type int pour les boucle for int x; // variable du type int pour le deplacement arriere int arriere =90; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // associe le servomoteur a la broche 2 servo_d1.attach(2,700,2000); // associe le servomoteur a la broche 3 servo_d2.attach(3,700,2000); // associe le servomoteur a la broche 4 servo_d3.attach(4,700,2000); // associe le servomoteur a la broche 5 servo_d4.attach(5,700,2000); // associe le servomoteur a la broche 6 servo_d5.attach(6,700,2000); // associe le servomoteur a la broche 7 servo_d6.attach(7,700,2000); //associe le servomoteur a la broche 8 servo_d7.attach(8,700,2000); //associe le servomoteur a la broche 9 servo_d8.attach(9,700,2000); //associe le servomoteur a la broche 10 servo_d9.attach(10,700,2000); //associe le servomoteur a la broche 11 servo_d10.attach(11,700,2000); //associe le servomoteur a la broche 12 servo_d11.attach(12,700,2000); //associe le servomoteur a la broche 13 servo_d12.attach(13,700,2000); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(1500); } //Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // appel du sous programme un petit bonjour petit_bonjour(); // temporisation delay(500); // appel du sous programme attaque attaque_spider(); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(500); // temporisation delay(2000); // realisation de 5 pas de rotation for (x=0;x<5;x++){ // appel du sous programme rotation rotation_spider(); delay(300); } } /* * ============================================= * * ensemble de sous programme * * ============================================= */ // Initialisation spider void initialisation() { // position des pattes en bas initd=5; initg=175; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); } //========== sous programme petit bonjour ========== void petit_bonjour() { servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); delay(200); servo_d1.write (5); delay(500); servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); servo_d1.write (5); } //==================fin du bonjour ====================== //========= position d'attaque de Spider ================ void attaque_spider() { initd=55; initg=125; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); delay(1000); servo_d8.write (40); servo_d10.write (140); delay(1000); initd=175; servo_d1.write (initd); servo_d11.write (initd); delay(1000); for (x=0;x<5;x++){ initd=135; servo_d1.write (initd); servo_d11.write (initd); delay(300); initd=175; servo_d1.write (initd); servo_d11.write (initd); delay(300); } } //====== position d'attaque de Spider ======= void rotation_spider() { //===== rotation de spider ================== //patte 1 servo_d1.write (25); delay (200); servo_d2.write (50); delay (200); servo_d1.write (5); delay (200); //patte 2 servo_d11.write (25); delay (200); servo_d12.write (50); delay (200); servo_d11.write (5); delay (200); //patte3 servo_d9.write (25); delay (200); servo_d10.write (50); delay (200); servo_d9.write (5); delay (200); //patte4 servo_d3.write (150); delay (200); servo_d4.write (50); delay (200); servo_d3.write (175); delay (200); //patte 5 servo_d5.write (150); delay (200); servo_d6.write (50); delay (200); servo_d5.write (175); delay (200); //patte6 servo_d7.write (150); delay (200); servo_d8.write (50); delay (200); servo_d7.write (175); delay (200); // position des pattes en arriere arriere=130; // position des pattes au centre servo_d2.write (arriere); servo_d4.write (arriere); servo_d6.write (arriere); servo_d8.write (arriere); servo_d10.write (arriere); servo_d12.write (arriere); delay(500); } //=====Fin de rotation de spider ===================== |
–
![]()
Présentation de Mr le régulateur 7806 en boitier TO220
La série de régulateurs à trois broches LM78XX est disponible dans de nombreuses valeurs de tensions de sortie fixes et est très utile dans nombre d’applications. Bien que conçus pour fournir des tensions de sortie fixes, ces circuits peuvent également délivrer des tensions et courants réglables à l’aide de quelques composants extérieurs
La série LM78XX est disponible en boîtier aluminium TO-220 et peut délivrer jusqu’à 1 A si on utilise un refroidisseur approprié. Ce boîtier possède une limitation en courant interne pour ne pas dépasser les limites de sécurité en courant de pointe. Une plage de sécurité est prévue pour le transistor de sortie permettant de limiter la puissance interne dissipée. Si celle-ci devient trop importante pour le refroidisseur utilisé, le circuit de disjonction thermique est activé pour éviter une surchauffe du circuit intégré.
_
Retour au sommaire