Nous sommes ravis de vous présenter une nouvelle page dédiée aux moteurs pas à pas, où vous pourrez télécharger tous nos codes, fiches techniques et schémas électriques liés à ce sujet. Notre objectif est de centraliser toutes les informations en un seul endroit, qu’il s’agisse de vidéos, de tutoriels détaillés, de documents ou de ressources pratiques sur ces moteurs. Si vous avez besoin d’informations supplémentaires ou si vous remarquez des manques dans l’un de nos tutos, n’hésitez pas à nous le faire savoir dans les commentaires de la vidéo YouTube correspondante. Nous sommes à l’écoute de vos questions et retours pour continuer à améliorer et enrichir ce contenu, afin de vous accompagner au mieux dans vos projets avec les moteurs pas à pas.
Mise à jour le 20/02/2026
Sommaire :
- Cobot Oryon Tuto pour le cablage des moteurs pas a pas
- Comment utiliser simplement un moteur pas a pas avec Arduino
- Principe de pilotage d’un moteur pas à pas avec Arduino ( en cours de transfert )
- Pilotage d’un moteur pas a pas avec un joystick
- Piloter plusieurs moteurs pas à pas sans prise de tête grâce à AccelStepper !
- Plateforme mobile pas à pas – Tuto #1 : Concevoir et maîtriser un châssis différentiel exigeant
- ESP32-P4 & C6 Tuto 3 : Piloter un Moteur Pas à Pas et Régler TH/TB en Temps Réel
- Retour au menu principal
Cobot Oryon Tuto pour le cablage des moteurs pas a pas
Dans ce tutoriel RedOhm, nous déterminons quel moteur pas à pas choisir pour le Cobot Oryon. Ensuite, nous analysons le driver DM860 afin d’assurer précision, couple et fluidité. Ce module digital garantit un mouvement stable à basse vitesse tout en limitant l’échauffement et le bruit. De plus, il accepte différents réglages de micro-pas et s’adapte aux moteurs NEMA 17 à 34. Enfin, nous expliquons comment la tension d’alimentation et l’inductance influencent directement le comportement d’un moteur pas à pas dans une application robotique exigeante.
Le répertoire dans le fichier de téléchargement.: Pas de dossier 1
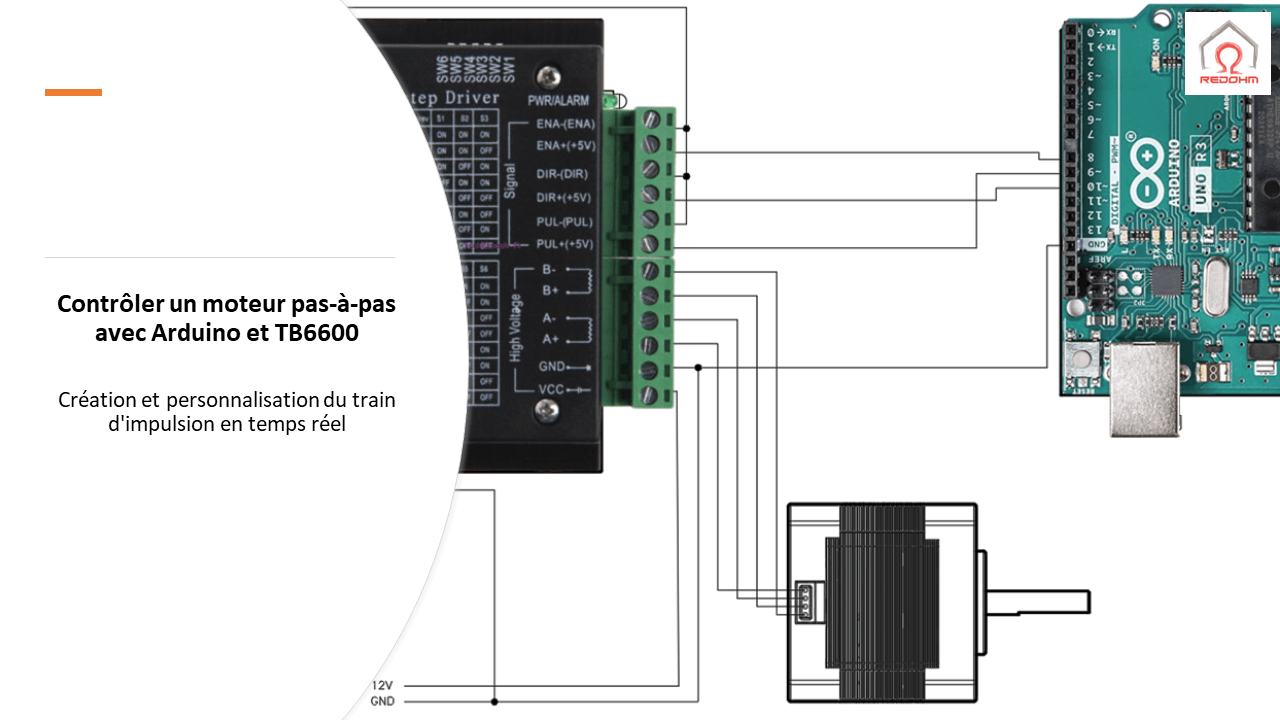
Comment utiliser simplement un moteur pas a pas avec Arduino
Ce tutoriel explique comment piloter un moteur pas à pas afin d’obtenir un comportement proche d’un moteur asynchrone. Le programme est organisé en trois onglets pour séparer clairement les fonctions. Le premier contient la structure principale avec setup() et loop(), qui assurent l’initialisation et l’exécution continue. Le deuxième regroupe la fonction selection_av_ar(), dédiée à la gestion du sens de rotation selon l’état des boutons. Le troisième onglet intègre la fonction deplacement(), responsable de la génération du train d’impulsions.
La fonction micros() permet de contrôler précisément l’intervalle entre deux impulsions, donc la vitesse. Un potentiomètre ajuste dynamiquement cette durée. Les broches DIR et ENA définissent respectivement le sens et l’activation, tandis que PUL déclenche chaque pas. Enfin, la liaison série affiche l’état du système pour faciliter le suivi et le diagnostic.
Le répertoire dans le fichier de téléchargement.: Dossier 2
Pilotage d’un moteur pas a pas avec un joystick
Ce tutoriel vous guide sur le contrôle d’un moteur pas à pas avec un joystick. Il explique comment calibrer les positions du joystick pour avancer ou reculer, tout en maintenant un couple stable lorsque le joystick est immobile. Le programme inclut un générateur d’impulsions pour définir la vitesse, un bouton pour gérer le couple de maintien, et le pilotage directionnel du moteur via la borne DIR du driver.
Le répertoire dans le fichier de téléchargement.: Dossier 11
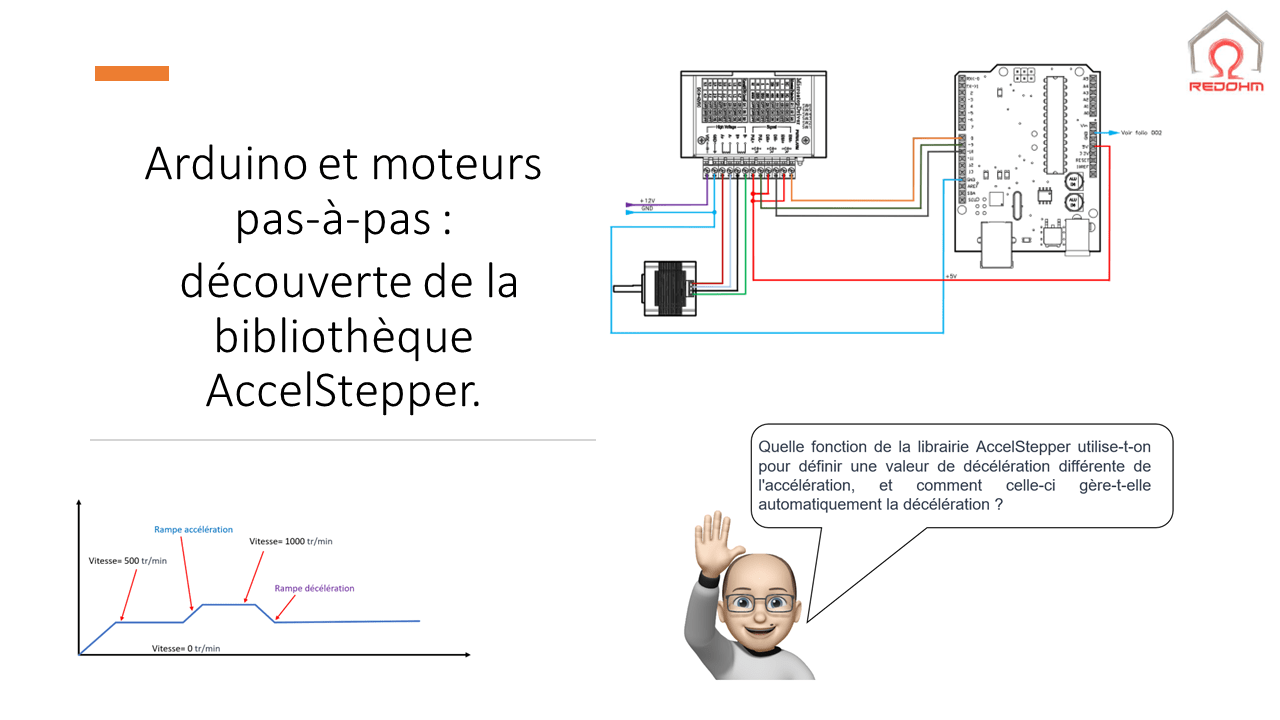
Piloter plusieurs moteurs pas à pas sans prise de tête grâce à AccelStepper !
Dans ce tutoriel Arduino, découvrez comment piloter facilement plusieurs moteurs pas à pas simultanément grâce à la bibliothèque AccelStepper. La grande force d’AccelStepper réside dans sa simplicité d’utilisation : vous n’avez pas à gérer manuellement le timing, les interruptions ou la synchronisation complexe des moteurs.
En quelques lignes de code seulement, vous configurez clairement chaque moteur de manière indépendante, en spécifiant simplement ses broches STEP et DIR. Que vous souhaitiez piloter deux, trois, ou même dix moteurs, la logique reste identique et accessible, rendant vos projets plus lisibles et faciles à maintenir.
Le répertoire dans le fichier de téléchargement.: Dossier 20
Retour au sommaire
Plateforme mobile pas à pas – Tuto #1 : Concevoir et maîtriser un châssis différentiel exigeant
Aujourd’hui, nous présentons une plateforme mobile motorisée par deux moteurs pas à pas. Contrairement aux solutions classiques en courant continu ou brushless, ce choix impose une maîtrise fine des rampes et du couple.
Cependant, c’est précisément l’objectif de ce premier tutoriel : comprendre les contraintes réelles pour construire une base robuste. Nous abordons notamment l’inertie, les frottements et les variations de tension batterie.
Techniquement, le châssis repose sur une Arduino Mega compatible AccelStepper, avec séparation claire puissance et commande. Ce choix garantit stabilité, évolutivité et coût maîtrisé.
Enfin, le pilotage débute par un joystick filaire calibré avec zones mortes et mixage différentiel. Ensuite, nous ferons évoluer l’architecture vers des solutions sans fil plus avancées.
Le répertoire dans le fichier de téléchargement.: Dossier 30
ESP32-P4 & C6 Tuto 3 : Piloter un Moteur Pas à Pas et Régler TH/TB en Temps Réel
Dans ce tutoriel, nous réalisons un banc de test interactif pour moteur pas à pas, entièrement piloté depuis une page web hébergée sur un ESP32-P4. Depuis un simple navigateur, l’utilisateur prend le contrôle complet du moteur sans logiciel externe.
L’interface permet d’activer ou de désactiver le driver via la commande ENABLE afin de gérer le couple de maintien. Elle autorise également le démarrage et l’arrêt des impulsions STEP en temps réel, ainsi que l’inversion instantanée du sens de rotation. De plus, des curseurs ajustent dynamiquement le temps haut (TH) et le temps bas (TB) du signal. Ces paramètres modifient directement la fréquence, donc la vitesse et la fluidité du mouvement.
Sur le plan technique, la carte JC-ESP32P4-M3 exploite une architecture double processeur : le ESP32-P4 dédié au pilotage temps réel et le ESP32-C6 chargé du Wi-Fi. La bibliothèque esp_timer.h garantit une génération d’impulsions à la microseconde, sans gigue, indépendamment de la charge réseau.
Le répertoire dans le fichier de téléchargement.:
![]()
Pour tout probléme |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .