
–
Mise à jour le 12/02/2022 : Les moteurs pas à pas sont des moteurs électriques d’une conception particulière, différents des moteurs classiques. Leur structure permet, par une commande électronique appropriée d’obtenir une rotation du rotor d’un angle égal à n fois un angle élémentaire appelé « pas ».
Sommaire :
- Présentation du moteur pas à pas
- Trois principaux types de moteurs pas à pas
- Moteur pas à pas à aimant permanent
- A réluctance variable
- Moteur pas à pas hybride
- Quelques formules sympa pour maîtriser la mise en oeuvre des moteurs pas à pas
- Existe-t-il une norme pour ce type de moteur ?
- Ce type de moteur fonctionne t’il quelque soit la fréquence ?
- Différents types de raccordement sur les moteurs pas à pas
- Connexions 4 fils
- 6 fils configuration »half coil »
- Tuto pour le cablage des moteurs pas a pas et leurs drivers
- Echauffement d’un moteur alimenté à courant constant I de fréquence nulle
- Organes auxiliaires à monter sur les moteurs pas à pas.
- Information sur les drivers pour moteur pas à pas compatible Arduino
- Shield 2 moteurs pas-à-pas DRI0023 : Shield moteur basé sur le driver A4988 permettant de contrôler 2 moteurs pas-à-pas à partir de 4 sorties digitales jusqu’à 2 A par phase.
- Nos tutoriels
- Tuto sur le pilotage d’un moteur pas à pas avec un joystick
- Tuto sur le pilotage d’un moteur pas à pas avec frein
- Tuto sur le controle d’un moteur pas a pas (comme un moteur asynchrone )
- Terminologie spécifique sur les moteurs pas à pas
- Notes et références sur les moteurs pas à pas
- A savoir sur l’utilisation des informations de cet article .
- Pour tout probléme.
- Retour au menu des actionneurs.
![]()
Présentation du moteur pas à pas |
Présentation du moteur pas à pas
Un moteur pas à pas est un moteur électrique synchrone sans balais qui convertit les impulsions numériques ( via un driver ) en rotation de l’arbre mécanique.
Il existe trois grands types de moteur pas à pas, les moteurs à aimants permanents, hybrides et à reluctances variables .
- Le moteur à aimants permanents : C’est le modèle le plus simple dans son fonctionnement. Sa constitution est très simple, et la rotation est obtenue en contrôlant l’alimentation des bobines ainsi que le sens du courant dans celles-ci .
- Le moteur à reluctance variable : ce moteur comporte un rotor à encoche non aimanté se positionnant dans la direction de la plus faible réluctance. Le fonctionnement du moteur est assuré par un pilotage du type unipolaire et l’avance du rotor est obtenue en excitant tour à tour une paire de pôles du stator.
- Moteur hybride : il tire profit des avantages des moteurs pas à pas à aimants permanents et du moteur réluctance variable.
Principe de fonctionnement du moteur pas à pas :
Chaque révolution du moteur pas à pas est divisée en un nombre de pas distincts, 200 pas dans la majorité des cas, et le moteur doit recevoir une impulsion distincte pour chaque pas. Le moteur pas à pas ne peut avoir qu’un seul pas à la fois, et chaque pas est de la même taille. Puisque chaque impulsion fait tourner le moteur à un angle précis, généralement de 1,8 °, la position du moteur peut être contrôlée sans aucun mécanisme de rétroaction. Lorsque les impulsions numériques augmentent en fréquence, le mouvement de pas se transforme en rotation continue, avec une vitesse de rotation directement proportionnelle à la fréquence des impulsions.
Utilisation des moteurs pas à pas
Ils sont utilisés quotidiennement dans les applications industrielles et commerciales en raison de leur faible coût, de leur haute fiabilité, de leur couple élevé à basse vitesse et de leur construction simple et robuste qui fonctionne dans presque n’importe quel environnement.
.
Avantages de ce type de moteur
- L’angle de rotation du moteur pas à pas est proportionnel à l’impulsion d’entrée.
- Le moteur pas à pas a un couple complet à l’arrêt (si les enroulements sont sous tension).
- Un positionnement précis et la répétabilité du mouvement puisque les bons moteurs pas à pas ont une précision de 3 à 5 % pour un pas et que cette erreur est non cumulative d’un pas à l’autre.
- Ces moteurs sont très utilisés dans toutes les applications mécaniques ou l’on doit contrôler simplement la position ou la vitesse d’un système en boucle ouverte.
- Excellente réponse pour le démarrage/arrêt/fonctionnement inverse.
- Très fiable puisqu’il n’y a aucun balai dans le moteur. La durée de vie du moteur pas à pas dépend donc simplement de la durée de vie du roulement.
- Il est possible de réaliser une rotation synchrone à vitesse très réduite avec une charge qui est directement couplée à l’arbre.
- Une large gamme de vitesses de rotation peut être réalisée puisque la vitesse est proportionnelle à la fréquence des impulsions d’entrée.
- Les moteurs pas à pas ne sont pas des moteurs rapides, les plus rapides dépassent rarement la vitesse maximale de 3 000 tr/min.
.
Retour au sommaire![]()
Trois principaux types de moteurs pas à pas |
Moteur pas à pas à aimant permanent
C‘est le modèle le plus simple dans son fonctionnement. Sa constitution est très simple, et la rotation est obtenue en contrôlant l’alimentation des bobines ainsi que le sens du courant dans celles ci.
Composition d’un moteur pas à pas à aimant permanent : C’est le modèle le plus simple dans son fonctionnement. Le rotor est constitué d’un aimant permanent, et le stator comporte 2 bobinages (ou 2 groupes de bobinages). En contrôlant l’alimentation des bobines, et le sens du courant dans celles-ci, on peut faire varier le champ dans le moteur.
Les modes de commande d’un moteur pas à pas à aimant permanent .
Principe de fonctionnement en pas entier : Dans ce mode de fonctionnement, les bobines sont alimentées l’une après l’autre dans un sens puis dans l’autre. L’aimant permanent suit le déplacement du champ magnétique créé par ces bobines et s’oriente selon une de ses 4 positions stables. Comme le rotor est aimanté, lorsque le moteur n’est pas alimenté le flux magnétique du à l’aimant permanent va à lui seul créer un couple résiduel ou couple de détente, en se mettant dans l’axe de l’une des bobines.
Fonctionnement en mode « High Torque » (fort couple) : Pour augmenter l’intensité du flux magnétique créé par le stator, et donc le couple moteur, on peut alimenter les deux bobines en même temps, en faisant varier uniquement le sens du courant dans chacune d’entre elles. Le rotor prendra donc également l’une des 4 positions .
![]()
Moteur pas à pas à réluctance variable
Le principe de fonctionnement de ce type de moteur pas à pas est proche de celui du moteur hybride, avec une structure dentée au rotor et au stator.
Il n’y a pas d’aimant au rotor pour renforcer l’action du flux et donc pas de couple résiduel sans courant.
Ce type de moteur pas à pas n’est presque plus utilisé ni fabriqué.
Composition d’un moteur pas à pas à réluctance variable: Un moteur pas à pas à réluctance variable est composé d’un rotor feuilleté en fer doux comportant un certain nombre de dents, et d’un stator également en fer doux feuilleté comportant un certain nombre de bobines. Le nombre de bobines doit être différent du nombre de paires de dents du rotor. L’alimentation de chacune des bobines va permettre la création d’un champ magnétique dans le stator, et le rotor s’oriente suivant les lignes de champ. On peut noter que lorsque le moteur n’est pas alimenté, comme il n’y a pas d’aimant permanent, le rotor peut prendre n’importe quelle position : un moteur pas à pas à réluctance variable n’a pas de couple résiduel ou couple de détente.
![]()
Le moteur pas à pas hybride
Pour tirer profit des avantages des moteurs pas à pas à aimants permanents et à réluctance variable, on utilise des moteurs hybrides. La commande est similaire à un moteur pas à pas à aimant permanent mais la constitution du rotor permet d’obtenir beaucoup plus de pas
Retour au sommaire
![]()
Quelques formules sympa pour maîtriser la mise en oeuvre des moteurs pas à pas |
.
Un moteur pas à pas se caractérise par le nombre de pas par tour (Np) d’ou la relation suivante :
Δα = 360 ° / Np
Δα : l‘angle entre 2 pas en degré
Np : le nombre de pas par tour
.
Le calcul de la vitesse en tours /mm par le biais de la fréquence à laquelle on envoie des impulsions.
N = ( f / Np)*60
N : vitesse de rotation en tour par minutes
f : la fréquence . Exprimée en Hertz (Hz), la fréquence correspond au nombre d’oscillations d’un phénomène périodique par unité de temps.
Np : le nombre de pas par tour
un moteur pas a pas fonctionnant a 200Hz .Fera 1 tour/s soit 60 tr/min .Le moteur etant donné a 200 pas par tour
.
Retour au sommaire![]()
Existe-t-il une norme pour ce type de moteurs ? |
.
Oui pour les moteurs pas à pas la norme NEMA aide à assurer l’interchangeabilité du matériel ,c’est la possibilité de passer d’un fabricant à un autre sans avoir à changer de manière importante les supports de montage, les accouplements, etc.
Mais attention,deux moteurs de la même taille NEMA peuvent en réalité différer légèrement d’un fabricant à l’autre. La longueur de l’arbre en est un exemple, et la présence d’un méplat à utiliser avec des vis de réglage varie selon les fournisseurs. La norme NEMA ne dicte pas non plus le nombre de fils conducteurs ni l’impédance des enroulements. Veillez donc à bien prendre en compte toutes les spécifications avant de commander votre moteur chez un autre fournisseur.
.
| Tableau des dimensions des differents Nema | ||
| type de Nema | Dimension | Exemple de ref |
| Nema 8 | 20 x 20 | 8HS11-0204S |
| Nema 11 | 28 x 28 | 11HS12-0674S |
| Nema 14 | 35 x 35 | 14HS13-0804D |
| Nema 16 | 39 x 39 | |
| Nema 17 | 42 x 42 | |
| Nema 23 | 47 x 47 | 57STH56 |
| 23HS22-3006S | ||
.
![]()
Ce type de moteur fonctionne t’il quelque soit la fréquence ? |
Il existe 5 zones de fréquence (vitesse) d’utilisation du moteur pas à pas.
- Zone 1 : la commutation des phases a lieu lorsque les oscillations du rotor sont atténuées. Cette zone basse fréquence risque de générer un bruit important de fonctionnement dû aux à-coups du moteur.
- Zone 2 : la commutation a lieu dans la zone des oscillations. Il peut arriver que l’énergie cinétique accumulée par le retour du rotor (vitesse négative) soit supérieure à l’énergie du couple moteur. Dans ce cas, il y a perte de pas ou arrêt du moteur. Ce phénomène est appelé résonance. Cette zone se situe approximativement entre 50 et 200 Hz et doit être évitée. Une 2ème zone de résonance à moyenne fréquence (medium range) se situe vers 800 à 1500 Hz.
- Zone 3 : la zone de résonance est passée, il est possible de démarrer ou d’arrêter le moteur sur 1 pas, sans perte de pas. La valeur limite est appelée fréquence de start-stop fss, ou pull-in. La valeur de la fréquence de start-stop est fonction du couple (statique + dynamique) que doit fournir le moteur et dépend de manière importante du type de commande électronique utilisée. Elle se situe généralement en-dessous de 1200 Hz.
- Zone 4 : au-delà de cette fréquence fss, il n’est plus possible de démarrer ou d’arrêter le moteur sur 1 pas, il faut donc démarrer le moteur dans la zone 3 et l’accélérer progressivement. Cette zone est appelée survitesse, ou pull-out.
- Zone 5 : la fréquence de commande est trop importante. Aussi, il n’y a pas de rotation possible.
.
![]()
Differents type de raccordement sur les moteurs pas à pas |
Connexions 4 fils
Les moteurs bipolaires à 4 fils sont les plus faciles à câbler. La vitesse et le couple dépendent de
l’inductance du bobinage. Lors de la sélection du courant de sortie du driver, il faut multiplier le courant de phase par 1,4 pour déterminer le courant de pointe.
Fig.1 : raccordement d’un moteur à 4 fils
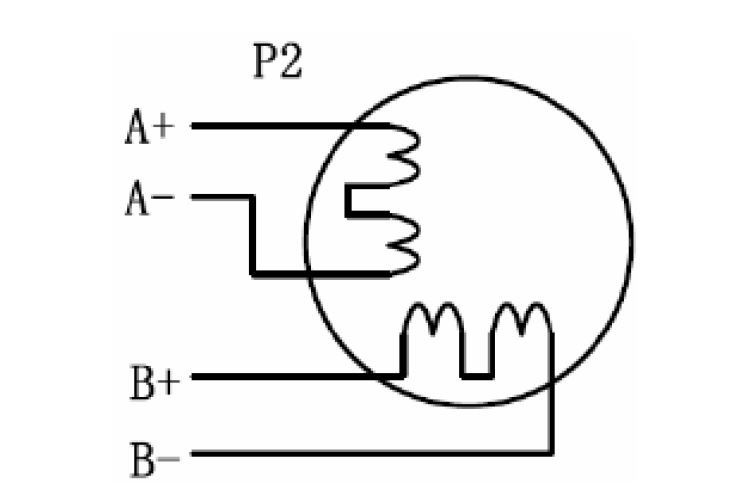
Connexions 4 fils ( fig.1)
.
Retour au sommaire.
![]()
De même que pour les connexions à 8 fils, les moteurs à 6 fils peuvent être configurés pour obtenir des vitesses ou un couple élevé. La configuration »half coil » n’utilise que la moitié du bobinage et favorise les vitesses élevées, tandis que la configuration »full coil » utilise tout le bobinage et privilégie le couple.
Configuration »half coil »
La moitié du bobinage est utilisée, ce qui donne une impédance plus faible et par conséquent moins de couple. Le couple sera plus stable à haute vitesse. Cette configuration est aussi appelée »half chopper ». Lors de la sélection du courant de sortie du driver, il faut multiplier le courant par phase (ou unipolaire) par 1,4 pour déterminer le courant de pointe.
Fig.2 : raccordement d’un moteur à 6 fils
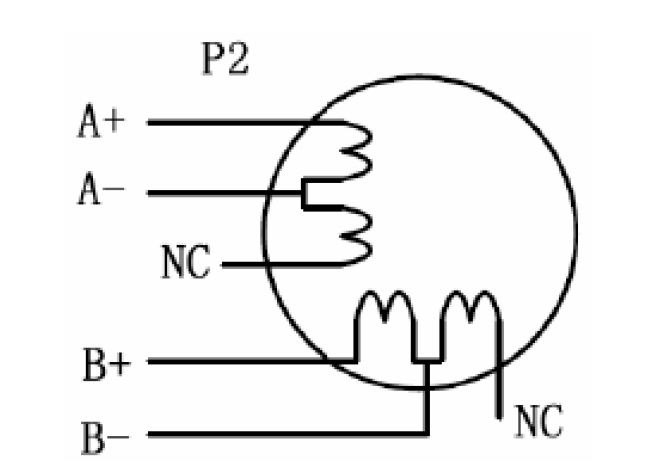
Connexions 6 fils ( fig.2)
.
Configuration »full coil »
La configuration »full coil » sur un moteur à 6 fils doit être utilisée pour des applications nécessitant un couple élevé à faible vitesse. En mode »full coil », le moteur doit fonctionner à seulement 70% de son courant nominal pour éviter la surchauffe.
Fig. 3 : raccordement d’un moteur 6 fils en »full coil » (couple elevé)
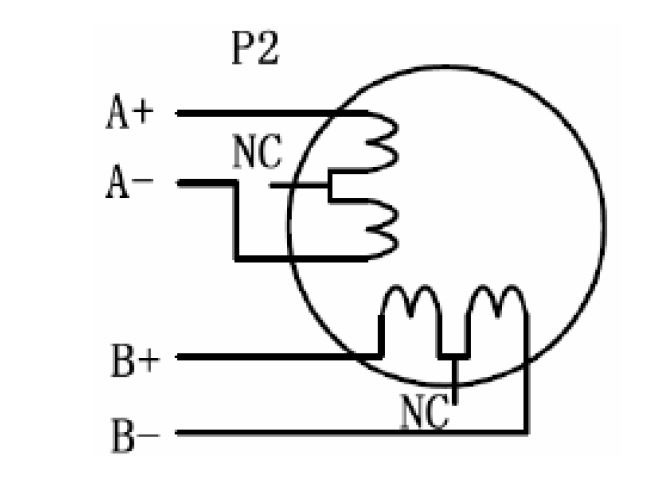
Connexions 6 fils ( fig.3)
.
Retour au sommaire
.
![]()
Tuto pour le cablage des moteurs pas a pas |
Dans ce tutoriel nous allons voir les différents types de moteurs pas à pas utilisés pour le Cobot Oryon et évidemment les drivers associés avec le cablage.
.
.
Retour au sommaire![]()
Echauffement d’un moteur alimenté à courant constant I de fréquence nulle |
.
Dans ce cas, le rotor est soumis à son couple de maintien. La cause unique de son échauffement est les pertes Joules.
Dans le cas d’une alimentation des 2 phases, la puissance transmise au moteur est : P = 2RI²
Si le courant I est le courant nominal donné par le constructeur, le moteur, et plus particulièrement le vernis d’isolement des fils de bobinage, doit supporter en continu ce courant.
La limite acceptable de la température extérieure mesurée sur le stator est d’environ 130°C. Au-delà de cette limite, une dégradation du bobinage peut se produire et par conséquent détruire le moteur. Le moteur pas à pas est un moteur qui chauffe énormément. Il est fréquent que la température de sa carcasse dépasse les 100°C.
La plupart des commandes électroniques ont un mode « repos » qui permet de réduire le courant lorsque le rotor est arrêté et donc de réduire l’échauffement tout en conservant un couple de maintien constant.
Un montage sur un support métallique permet une meilleure évacuation des calories.
Dans la définition d’un moteur pas à pas, il est indispensable de connaitre le « duty cycle » (temps marche/temps arrêt) car il permet d’optimiser le fonctionnement sans dégrader le moteur par un échauffement excessif.
.
Retour au sommaire![]()
Organes auxiliaires à monter sur les moteurs pas à pas.
|
.

Exemple : DC Frein électromagnétique 24V 0.25Nm(35.4oz.in) pour Nema 17 Moteur pas à pas – STEPPERONLINE
.
Lorsque la puissance électrique est appliquée, l’induit est tiré par la force électromagnétique dans l’ensemble du corps de l’aimant qui surmonte l’action du ressort. Cela permet au disque de friction de tourner librement. Lorsque la puissance électrique est interrompue, la force électromagnétique est supprimée et le ressort de pression force mécaniquement la plaque d’armature à serrer le disque de friction entre lui-même et la plaque de pression. Cela développe un couple pour maintenir la charge.
.
Retour au sommaire
![]()
Terminologie spécifique sur les moteurs pas à pas |
Angle de pas : Angle nominal (en degrés) effectué par le rotor par impulsion de commande. Un moteur de 200pas/ tr à un angle de 1.8°.
Constante de temps électrique : Temps nécessaire pour que le courant atteigne 63% de la valeur asymptotique finale fixée par un échelon de tension. La constante de temps électrique est égale au rapport de l’inductance par la résistance : L/R.
Controleur : Etage logique d’un circuit de commande. Le contrôleur génère les signaux de commande du driver.
Courant nominal par phase : Intensité par phase à fréquence nulle qui provoque la déviation par rapport à une position théorique, en pourcentage d’un pas, après n’importe quel nombre de pas.
Couple de retenue : Couple maximum produit par le moteur, lorsqu’il est alimenté à son courant nominal. Ce couple est mesuré en statique.
Couple dynamique : Couple que délivre le moteur à une vitesse donnée, à la limite de perte de synchronisme.
Couple résiduel : Couple produit par le moteur lorsqu’il n’est pas alimenté et que ses bobines ne sont pas en court-circuit. C’est donc le couple nécessaire pour faire tourner le rotor lorsque le moteur est complètement déconnecté.
Inertie : Mesure de résistance des corps à toute variation de vitesse.
Micro-pas : Subdivision d’un pas entier permettant d’obtenir une résolution plus grande et de réduire les oscillations de couple.
Moteur pas à pas à aimant permanent : C’est le modèle de moteur le plus simple dans son fonctionnement. Sa constitution est très simple, et la rotation est obtenue en contrôlant l’alimentation des bobines ainsi que le sens du courant dans celles ci.
Pas entier : Déplacement élémentaire du rotor lorsque l’alimentation du moteur passe d’une phase à l’autre.
Phase : Ensemble de poles et de bobines produisant du couple.
Pps (pas par seconde) : Vitesse du moteur exprimée en fonction du nombre de pas effectué par seconde.
.
Retour au sommaire![]()
Notes et références sur les moteurs pas à pas |
Fournisseur : https://www.robotshop.com
Information technique :.
Retour au sommaire
A savoir sur l’utilisation des informations |
.
Les informations sur les caractéristiques et spécificités des moteurs pas à pas et des materiels qui sont fournis sur cette page correspondent aux informations des fiches techniques du constructeur si malgré le soin apporté à la réalisation de cet article une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable.
Les programmes , schémas et autres que ceux donnés par le constructeur font parti des montages utiles à nos applications si malgré le soin apporté à nos montages une erreur s’est glissée dans ces lignes nous ne pourrions en être tenu responsable .
L’ensemble des informations techniques de cet article a été utilisé pour nos applications, elles vous sont fournies comme un exemple de document de travail. Mais nous ne pourrions être tenu responsables d’une mauvaise utilisation de celle-ci.
.
Retour au sommaire.
Pour tout probléme |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.