
Mise à jour le 25/10/2020 : Le robot L3-37 sera reproductible par tous et une grande partie sera en impression 3D.Retrouvez l’ensemble des articles concernant le projet L3-37 sur notre site https://www.redohm.fr ou suivez-nous sur notre chaîne YouTube.( Projet OpenSource )
Sommaire :
- 22/10/2020 : Quelques photo de l’Impression 3D du robot
- 24/10/2020 : Motorisation de la tête par des servomoteurs RC
- 25/10/2020 : Base de la tête de L3-37
- 02/11/2020 : Etude des deplacements de la tête avec les servo Dynamixel
- 26/11/2020 : La version L3-37 à servomoteur rc terminée
- Retour au menu principal
25/10/2020 – Base de la tête de L3-37
22/10/2020 – Quelques photos de l’impression 3D du robot |
Centre d’impression 3D
.


.
Retour en haut de page
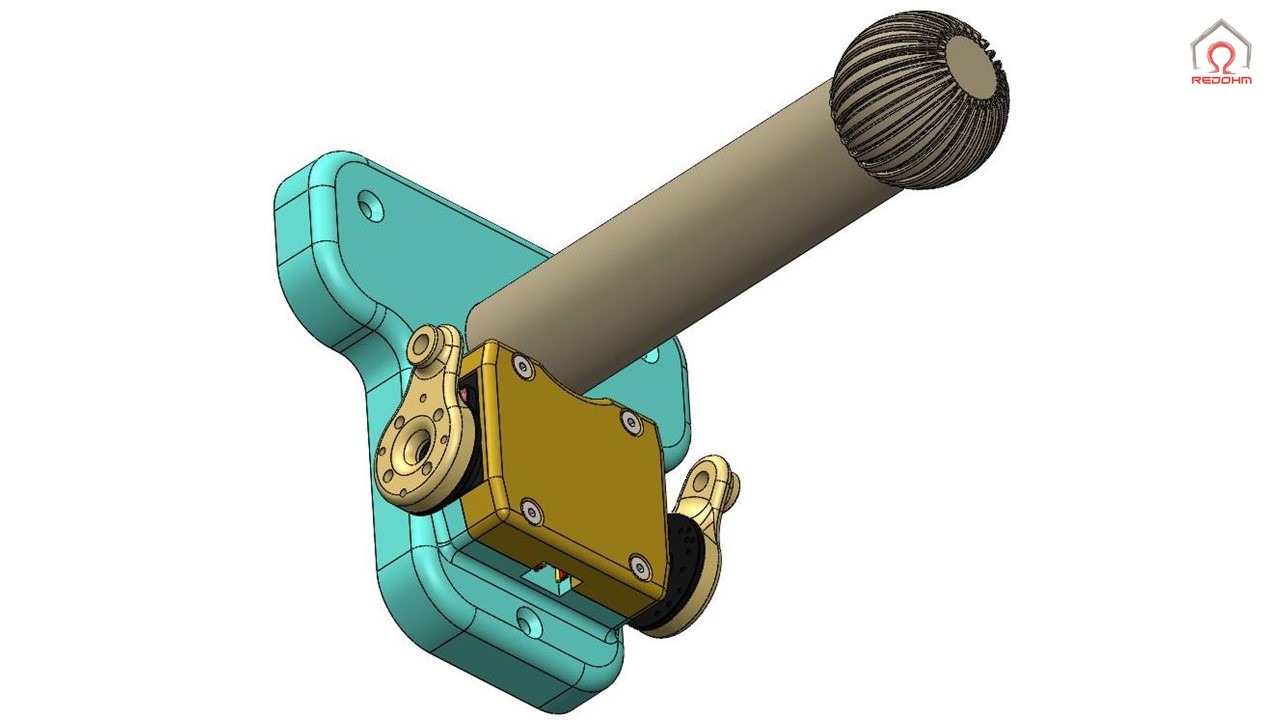
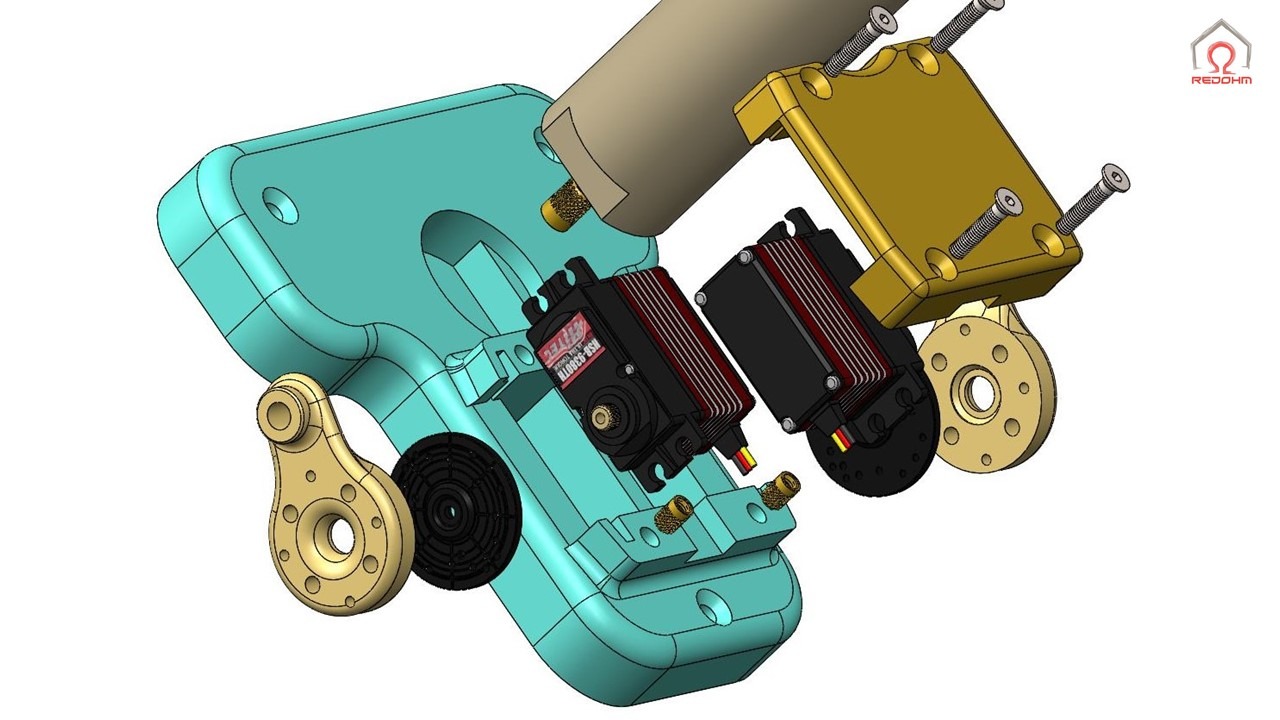
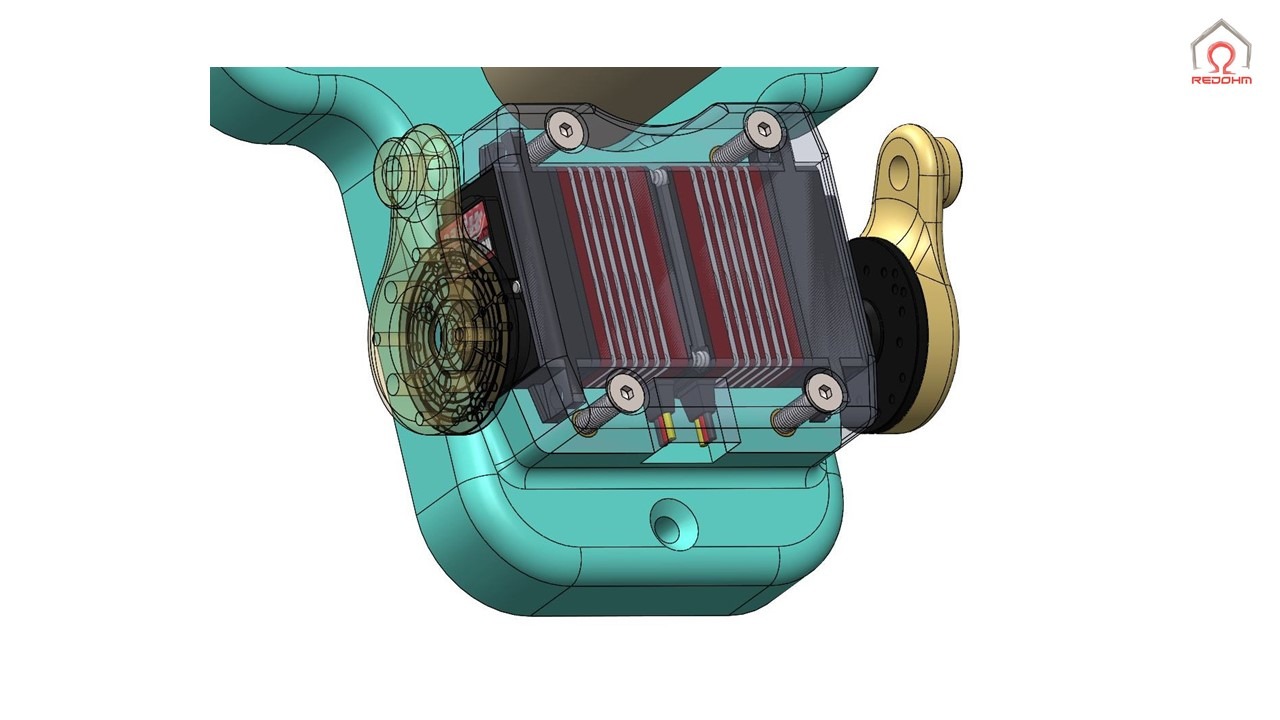
24/10/2020 – Motorisation de la tête par des servomoteurs RC type
|
.
Voici des fiches techniques un peu plus détaillées sur la motorisation par servomoteur RC. Bien conscient que les servomoteurs proposés ont un prix un peu élevé et qui pourrait bien évidemment repousser quelques passionnés, nous allons donc vous proposer une troisième plate-forme avec des servomoteurs du même constructeur mais avec un prix moindre. Nous choisirons donc le Hiltec HS 805BB. Nous sommes bien évidemment ouverts à d’autres propositions de servomoteurs en respectant un couple de fonctionnement de 20 kg.cm minimum. Au niveau du câblage et de la programmation, cela ne changera pas grand-chose.
.

L3-37-Version servomoteur RC – RedOhm
L3-37-Version servomoteur RC – RedOhm 001
.
L3-37-Version servomoteur RC – RedOhm 002
L3-37-Version servomoteur RC – RedOhm 003
.
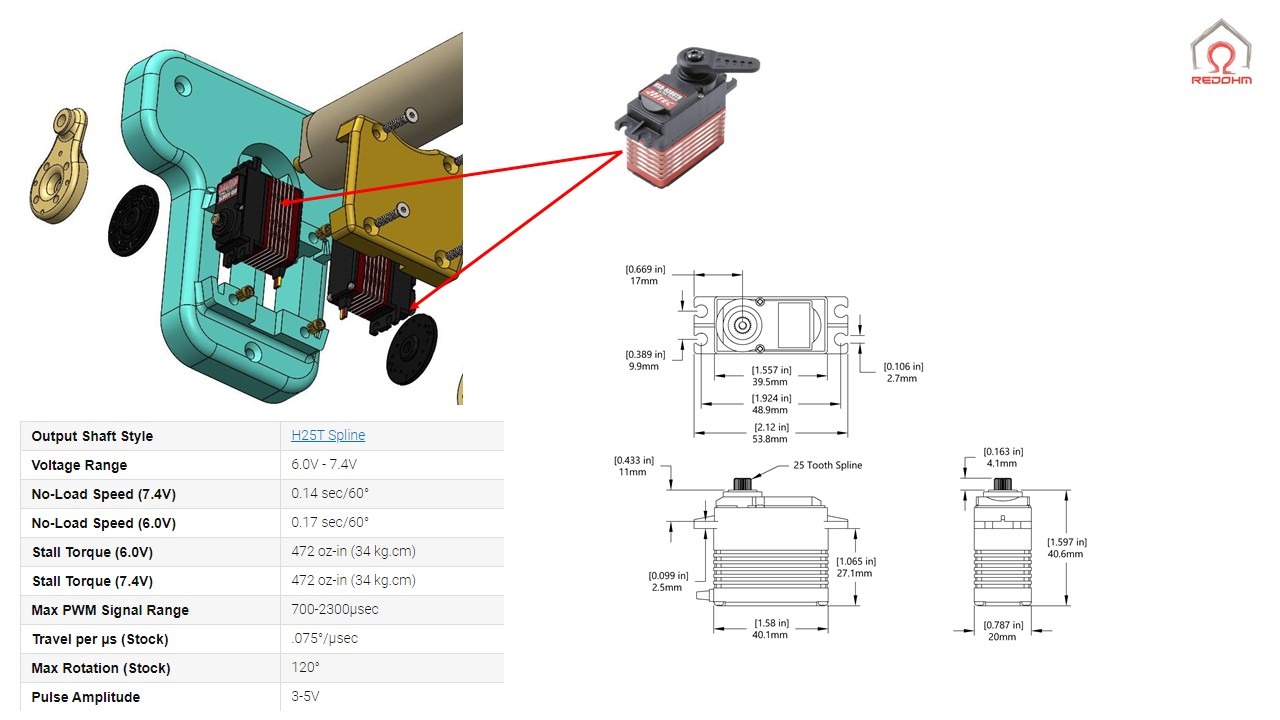
Information complementaire sur le servomoteur HSB-9380TH
Electrique : Bien que compatible avec la plupart des dispositifs de radiocommande, la fonction de freinage par récupération des servos de la série HSB-93XX peut poser un problème si le dispositif ne peut pas accepter un reflux de courant. Les types d’appareils qui ne peuvent pas accepter ce reflux sont: les régulateurs de tension, les récepteurs Power Safe et certains circuits BEC, qu’ils soient autonomes ou intégrés dans un contrôle de vitesse électronique.
Mécanique arbre de sortie :
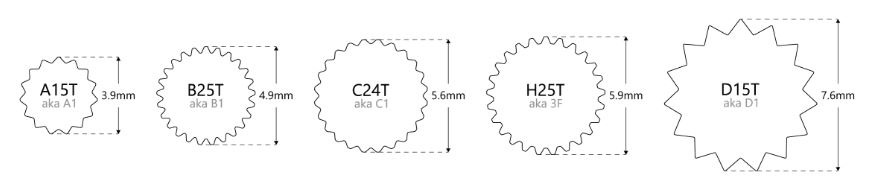
Les servos ont un arbre de sortie qui utilise généralement un profil cannelé afin de transférer le couple de l’arbre de sortie dans l’accessoire servo qui y est fixé. Ce profil cannelé est généralement classé en fonction du nombre de dents, cependant, il est possible que deux servo-cannelures très différentes aient le même nombre de dents car elles ne capturent pas le diamètre de la cannelure ou le profil de la dent. Par exemple, A15T et D15T ont tous deux 15 dents, mais le D15T est une taille de cannelure beaucoup plus grande que l’A15T. Les graphiques ci-dessous sont des représentations lâches des tailles de spline courantes que l’on trouve sur les servos amateurs. Si vous avez un servo que nous n’offrons pas sur le site, vous pouvez vérifier si votre servo a une spline qui correspond à l’un des profils de spline ci-dessous en comptant les dents et en mesurant la distance à travers la spline.
Données techniques HSB -9380 TH
- Style d’arbre : H25T Spline
- Gamme de tension : 6.0V – 7.4V
- Vitesse à vide à 7,4 Volts : 0.14 sec/60°
- Vitesse à vide à 6 Volts : 0.17 sec/60°
- Couple de décrochage à 6 volts : 472 oz-in (34 kg.cm)
- Couple de décrochage à 7,4 volts : 472 oz-in (34 kg.cm)
- Plage de signal PWM maximale : 700-2300μsec
- Travel per µs (Stock) : .075°/μsec
- Rotation maximal : 120°
- Amplitude d’impulsion : 3-5V
- Température de fonctionnement : -20°C to +60°C
- Rotation continue modifiable : oui
- Direction avec / augmentation du signal PWM : Dans le sens des aiguilles d’une montre
- Largeur de la bande morte : 2µs
- Type de moteur : Brushless
- type de rétroaction ; 5KΩ Potentiometer
- Support d’arbre de sortie : roulements à billes doubles
- Materiaux pour les engrenages : Titane (Hybrid MPD 1st Gear)
- Rotation maximal ( reprogrammée ) : 205°
L3-37-Version servomoteur RC – RedOhm 005
.
Retour en haut de page
25/10/2020 – Base de la tête de L3-37 |
.

Base de la tête de L3-37 – RedOhm 001
.
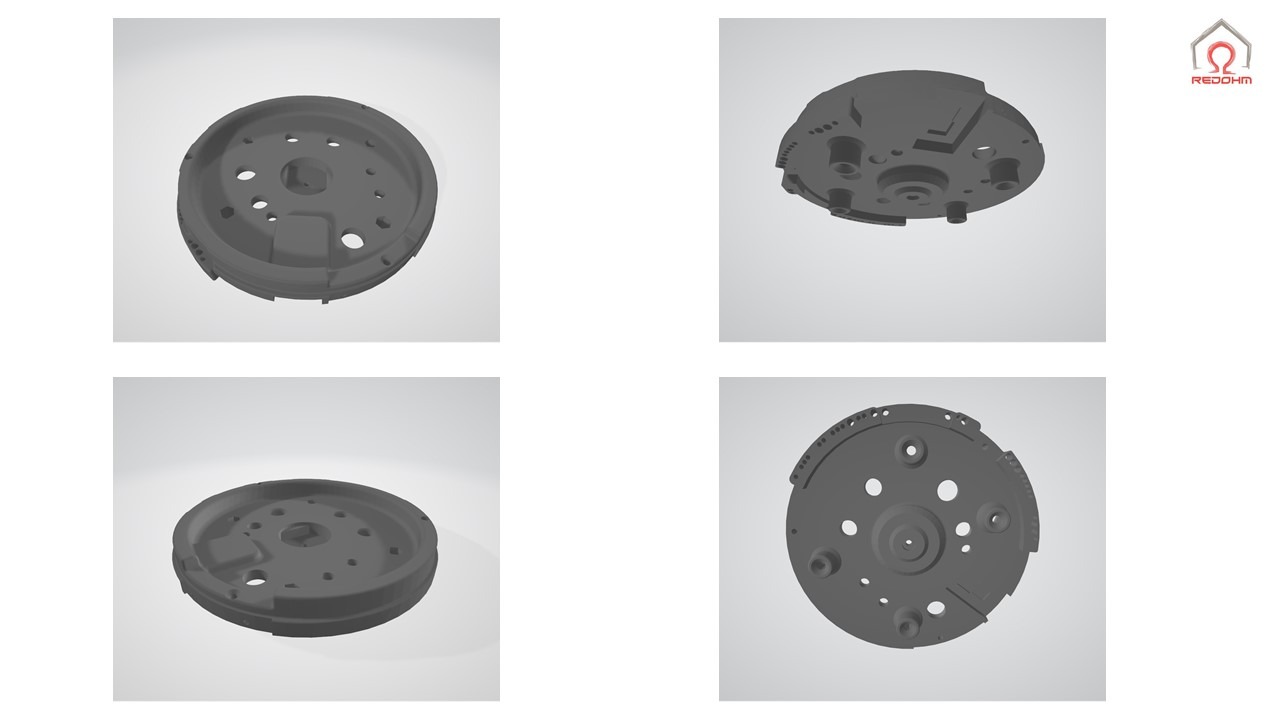
Base de la tête de L3-37 – RedOhm 002
.
Retour en haut de page.
02/11/2020 : Etude des deplacements de la tête avec les servo Dynamixel |
.
Dans le cadre du projet L3 -37, nous utilisons deux sortes de motorisations pour piloter la tête du robot ou des moteurs de type RC (souvent utilise en modélisme ) ou bien des moteurs du type Dynamixel.
Dans le cadre de ce tutoriel qui ne traite que des moteurs Dynamixel, nous allons vous initiez à lire les registres se trouvant à l’intérieur du servomoteur qui nous permet de définir le déplacement de notre servo , ceci afin de déterminer la butée basse et haute que l’on devra appliquer par logiciel pour les mouvements de la tête.
Pour pouvoir lire ses registres, il faut déverrouiller le couple afin pouvoir déplacer la base de la tête de L3 -37 manuellement Avant de se lancer dans l’explication du programme, nous allons vous faire une démonstration du déverrouillage et de la lecture des registres de déplacement par le biai du tuto ci-dessous .
.
Retour en haut de page
26/11/2020 : La version L3-37 à servomoteur rc terminée |
.

.

.
Voici donc la version L3 -37 à servomoteur RC terminé on peut cependant regretter un petit manque de résolution sur la tête qui ne fait pas ressortir des courbes suffisamment fluides. Pour cela nous allons modifier la résolution de nos fichiers STL ce qui permet de s’approcher au mieux des surfaces du modèle 3D en revanche ce procédé augmente la taille du fichier STL. Vous aurez donc le choix entre télécharger la version standard ou la version haute résolution.
.
Retour en haut de page
0.
2/11/2020 : Etude des deplac
ements de la tête avec les servo Dynamixel
.