–
Mise à jour le 18/03/2018
Sommaire :
- Differente vue du systéme de vision
- Vidéo de l’éclatée du systéme de vision du robot Maya .
- En cours de complément à suivre .
- Retour au menu
![]()
Différente vue du systéme de vision |
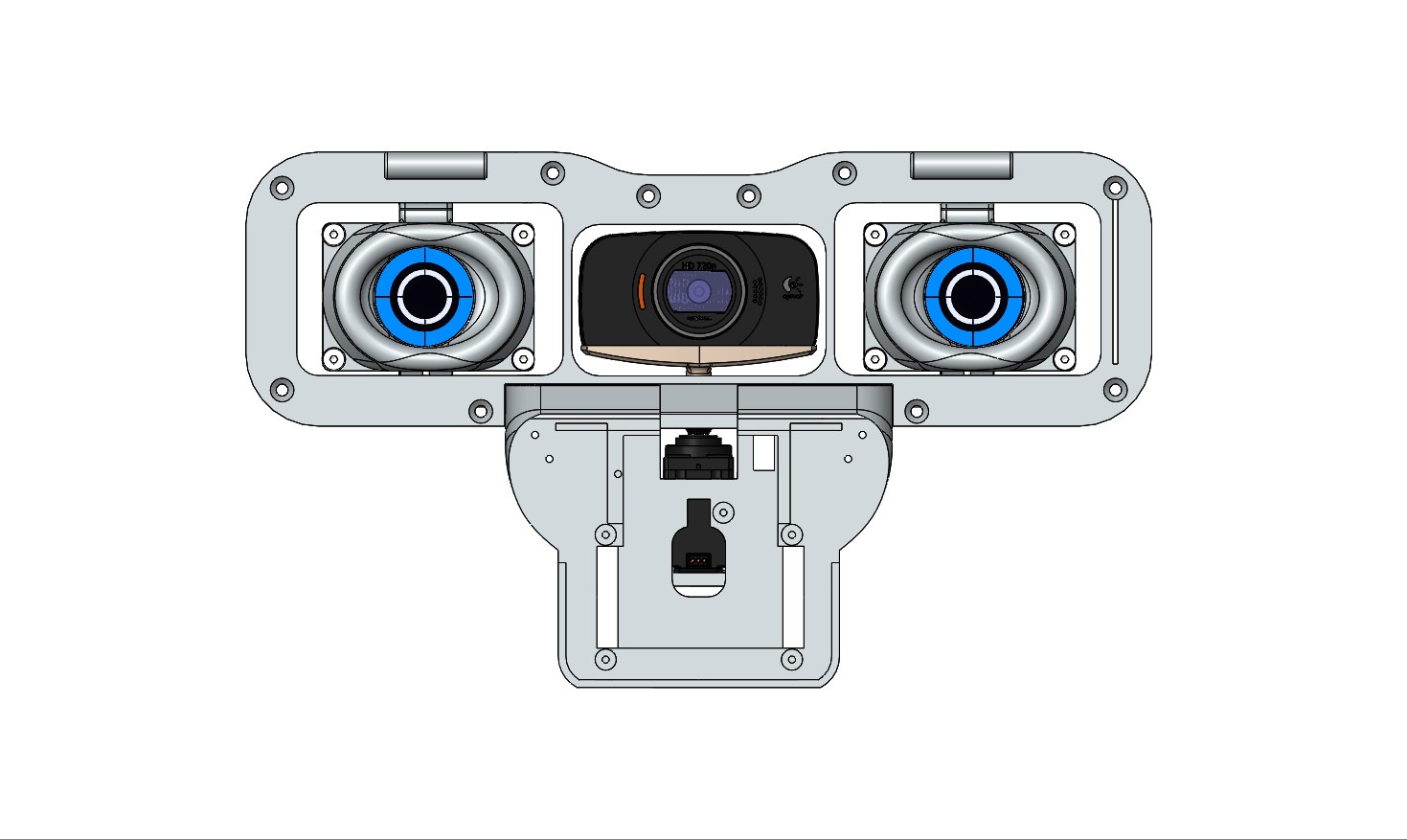
Le robot Maya , Le systéme de vision ( Vue de face )
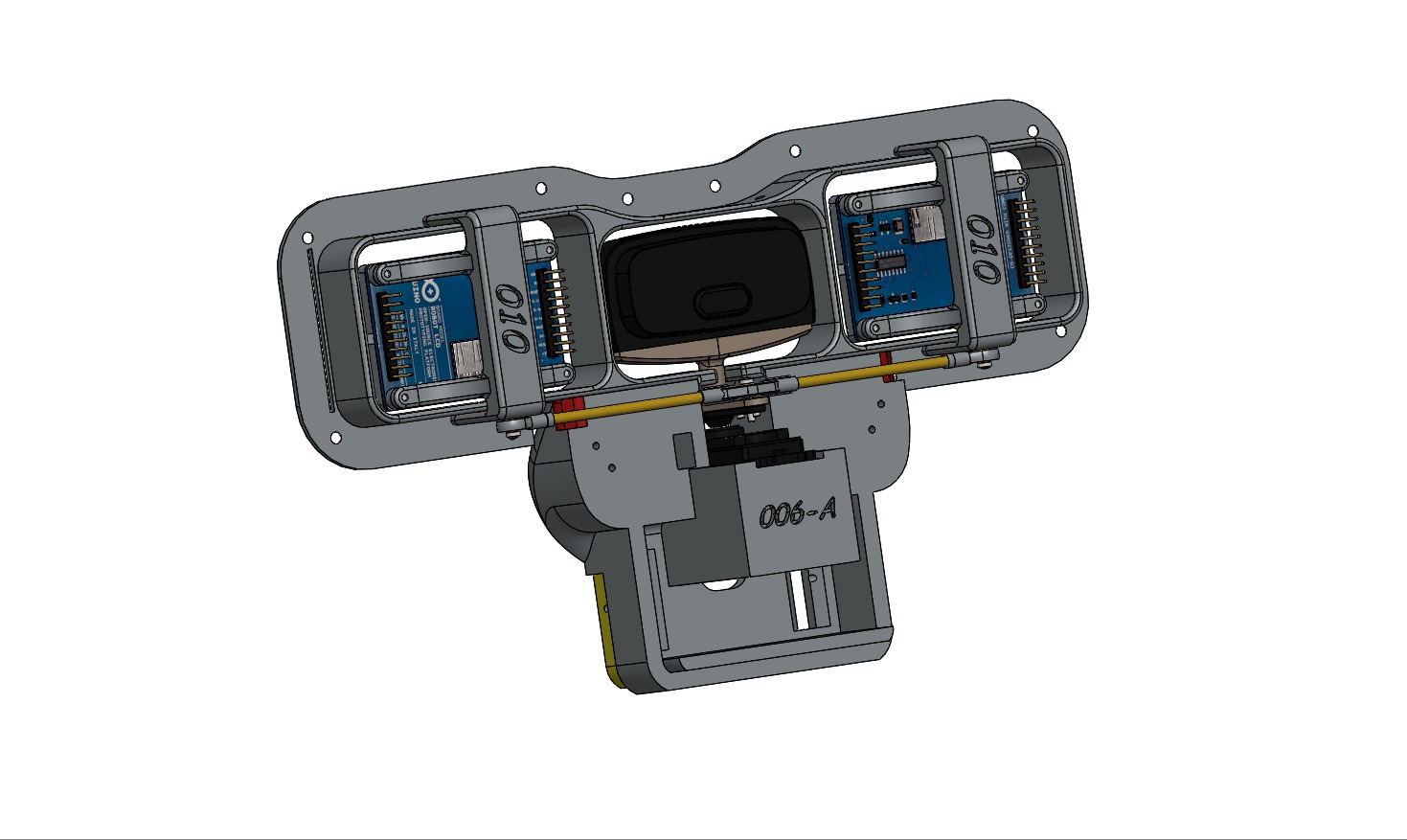
Le robot Maya , Le systéme de vision ( 01 )
![]()
Vidéo de l’éclatée du systéme de vision du robot Maya |
Cette vidéo vous permettra de mieux appréhender le montage de cette ensemble.
![]()