.
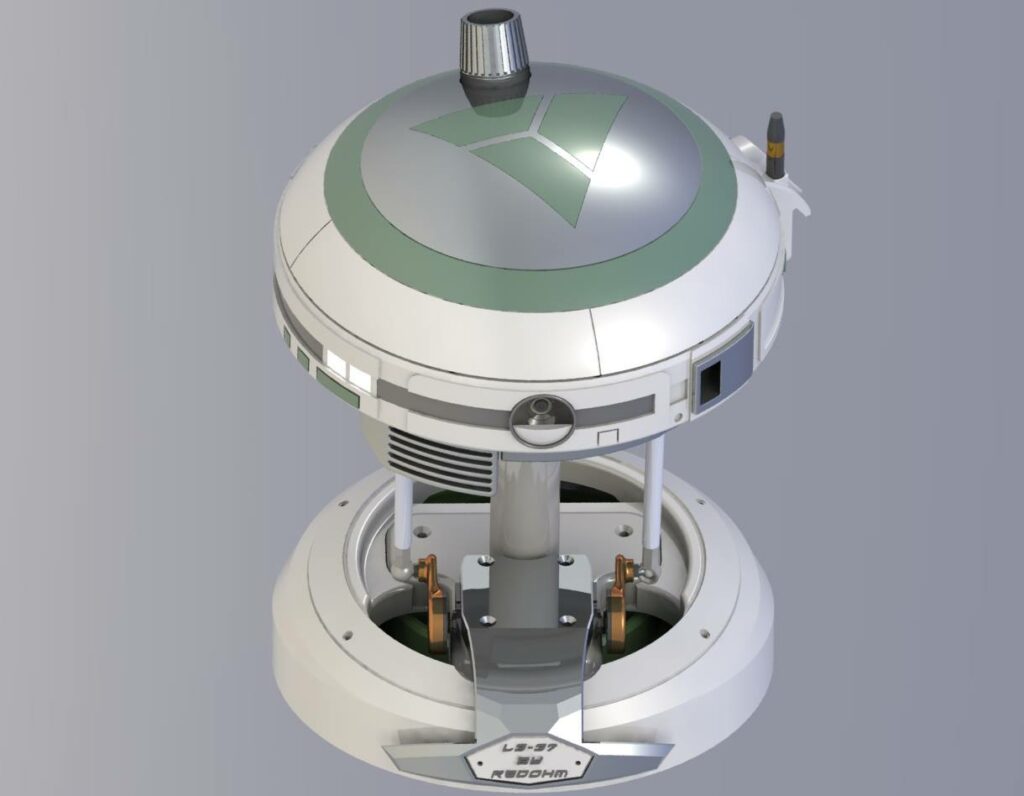
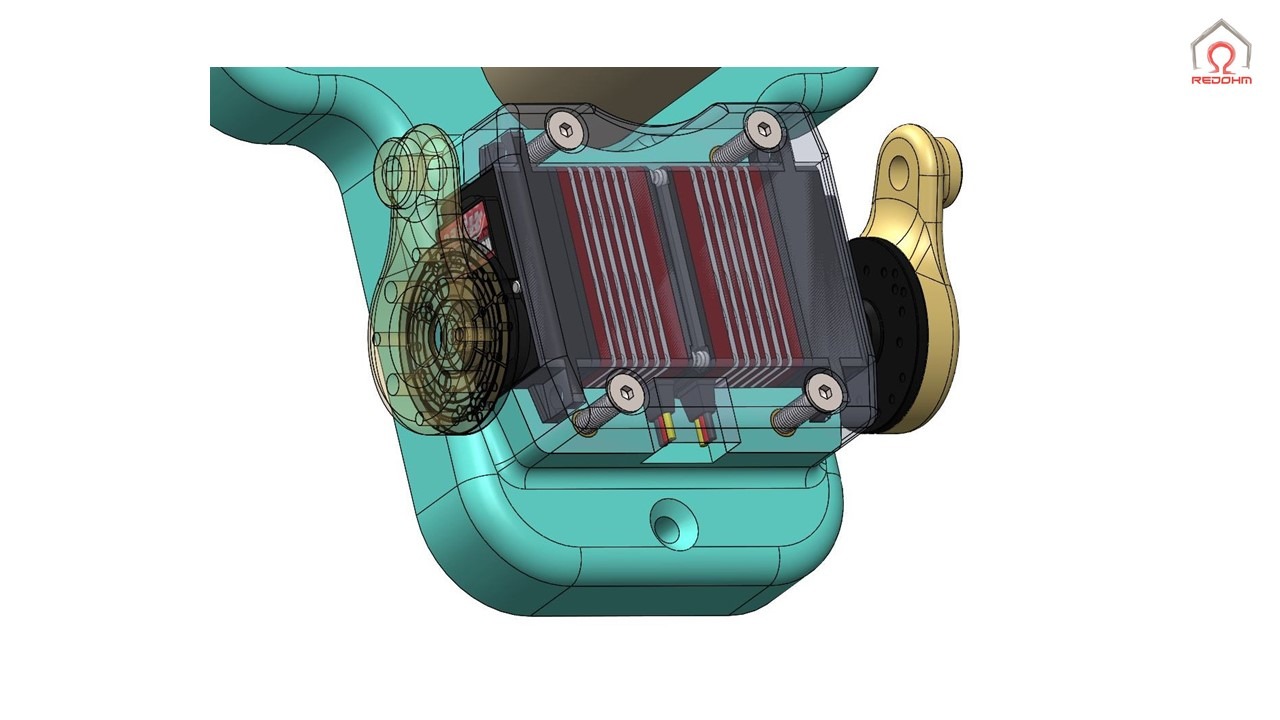
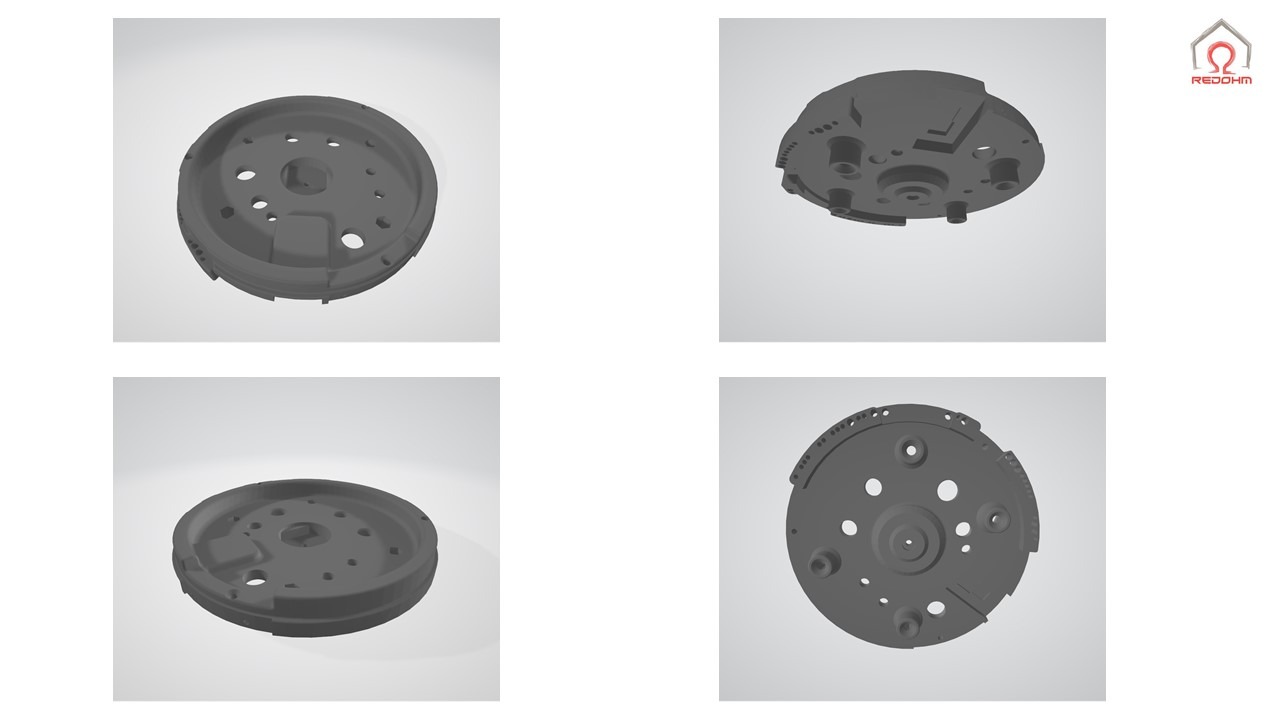
Vous trouverez dans cet article tous les fichiers STL pour construire votre robot L3 -37. Et vous trouverez les liens nécessaires pour les fiches de montage et les tutoriels associés.
.

L3-37 – RedOhm
.
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.