Sommaire
- Dynamixel changement de l’identifiant.
- Harmonisation de la vitesse de communication entre actionneur et la carte
- Lecture des registres de deplacement et de déverrouillage du couple.
- Pilotage de moteur Dynamixel par joystick
- Pour tout probléme
- Retour au menu Vidéo.
2020/09/02 Changement de l’identifiant |
.
Le but de ce tutoriel est de vous initier aux changements de l’identifiant sur les servomoteurs dynamixel par le biais de la carte Arbotix-M . Cette carte est compatible avec l’IDE Arduino.
.
Retour au sommaire
2020/09/18 harmonisation de la vitesse de communication
|
.
Le but de ce tutoriel est de vous familiariser avec les commandes de changement de vitesse et d’identifiant pour les servomoteurs Dynamixel. Le problème est le suivant, la connexion d’un servomoteur MX-106 et d’un servo AX-12 sur la même carte. En sachant que ces deux servomoteurs ne possèdent pas la même vitesse de communication par défaut, et possèdent le même identifiant par défaut. Il faut donc changer la vitesse de communication dans un des servomoteurs pour que les deux fonctionnent sur le même réseau, et enfin que chacun des servomoteurs possède un identifiant propre.
.
.
Retour au sommaire.
2020/11/02 Lecture du registre de déplacement et de
|
.
Dans le cadre de ce tutoriel nous allons vous initiez à lire les registres se trouvant à l’intérieur du servomoteur qui nous permet de définir le déplacement de notre servo , ceci afin de déterminer la butée basse et haute que l’on devra appliquer par logiciel pour des deplacements future ainsi que le déverouillage du registre de couple .
.
.
Retour au sommaire
.
2021/01/03 Pilotage de moteur Dynamixel par Joystick |
.
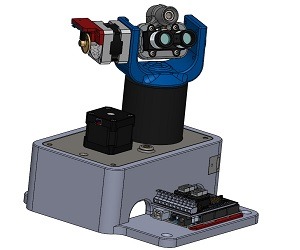
Ce tutoriel a pour but de vous initier à la programmation des servomoteurs Dynamixel . Nous avons pris comme base la tête de L3 -37 qui est une réalisation de RedOhm pour vous expliquer l’étalonnage et le fonctionnement pour piloter celle-ci avec un joystick. Le tuto s’articule en 4 phases : la première étant la présentation de la base de la tête, le câblage d’un joystick et la carte contrôleur, vous avez aussi une explication sur le fonctionnement de la manette de jeu, et enfin une explication détaillée du programme. Vous pourrez récupérer le programme sur notre site RedOhm.fr celui-ci est abondamment commenté.
.
.
Retour au sommaire
Pour tout probléme |
.
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour au sommaire