Sommaire :
- 2022-04-05- Les servomoteur a alimentation séparée
- 2022-03-13- La création d’un retour d’information
- 2022-01-09- Arduino , augmenter le nombre de sorties PWM
- Retour au menu Vidéo
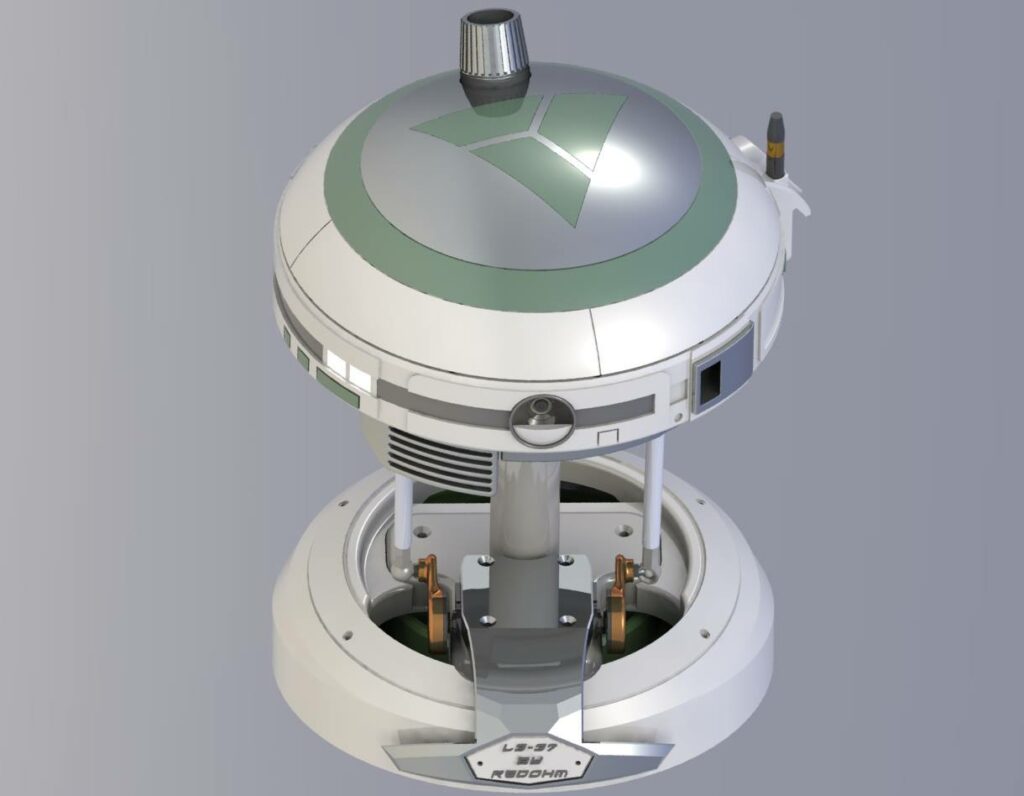
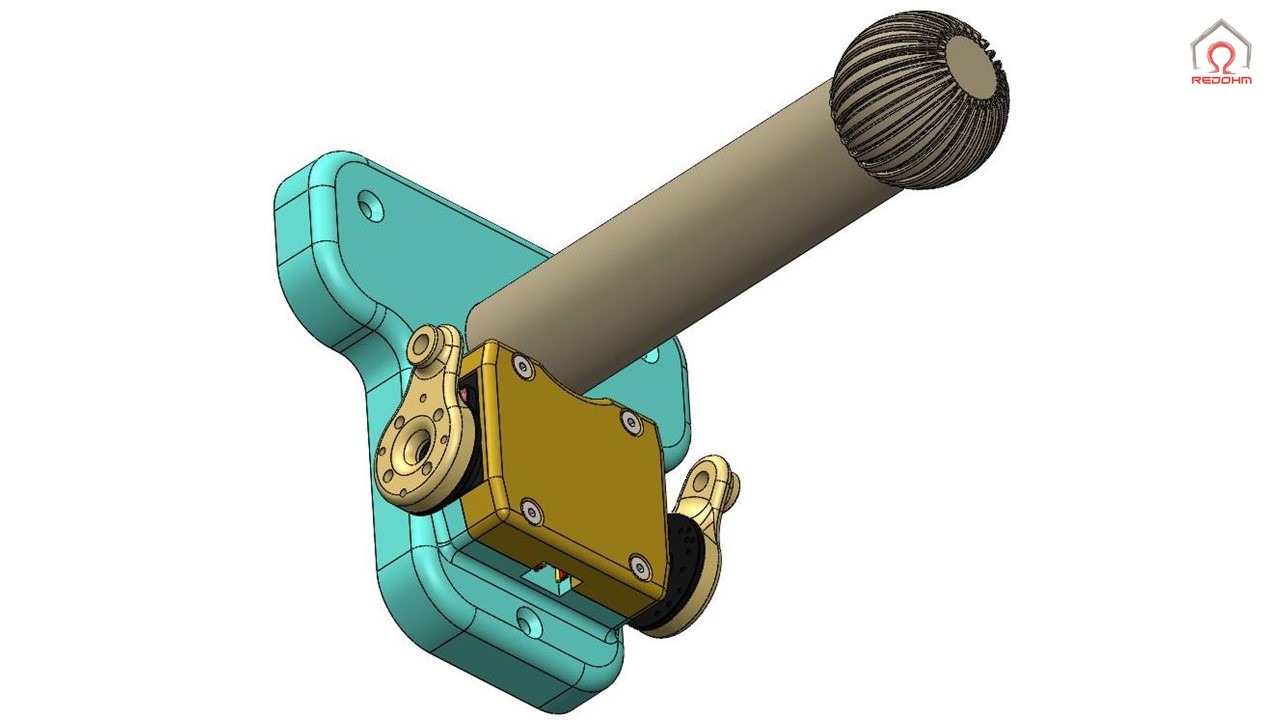
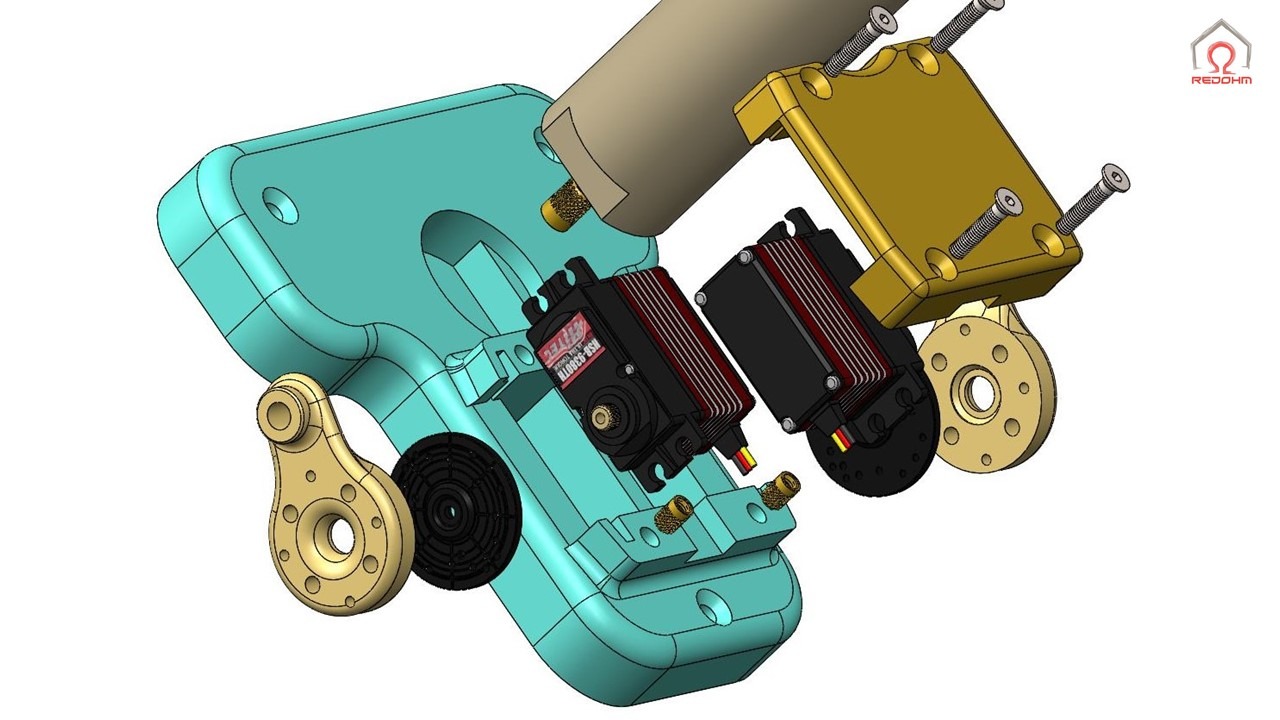
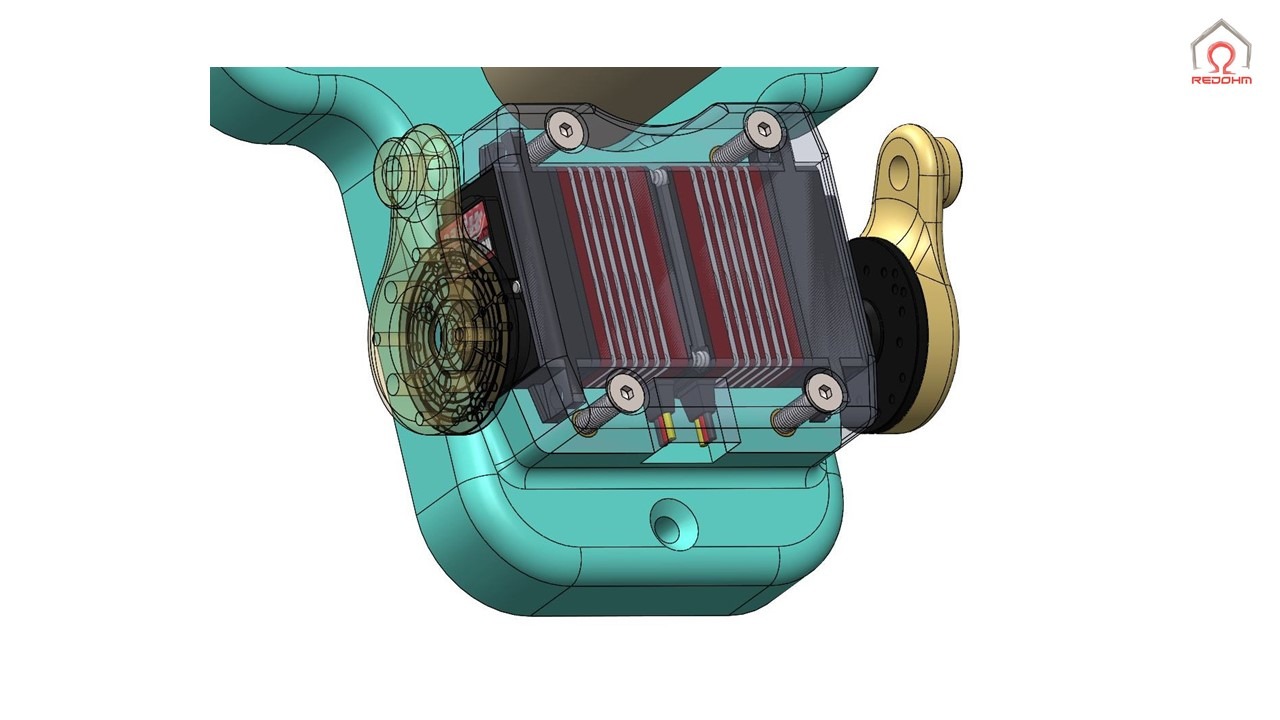
2022-04-05- Les servomoteur a alimentation séparée |
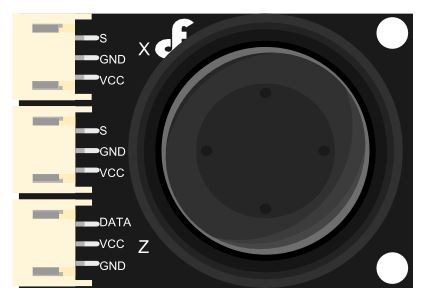
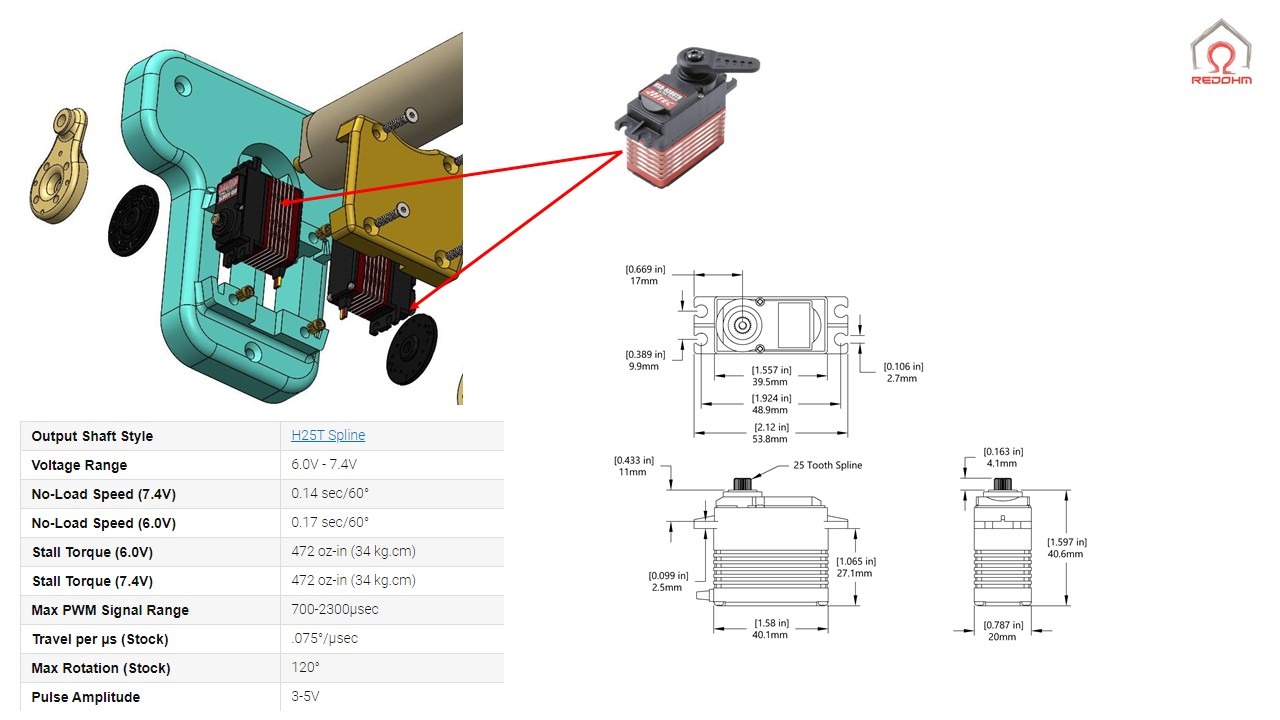
Dans cette nouvelle vidéo nous allons voir comment travailler avec des servomoteurs qui possèdent des alimentations séparées. Contrairement au servomoteur que l’on utilise en général et qui possède trois fils eux en possède 5 et ce sont de très gros servo. Nous allons étudier le câblage et le code Arduino . Pour illustrer le fonctionnement de ce type de servomoteur, nous l’avons intégré dans une application. Le but de cette appli est de piloter ce matériel avec simplement un joystick.
.
Retour au sommaire
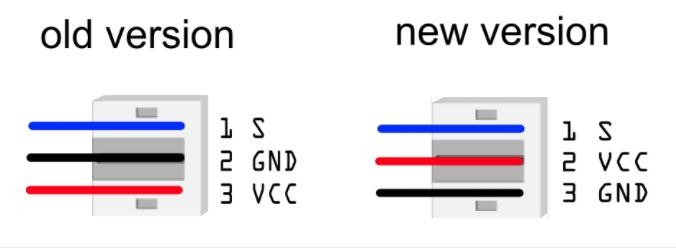
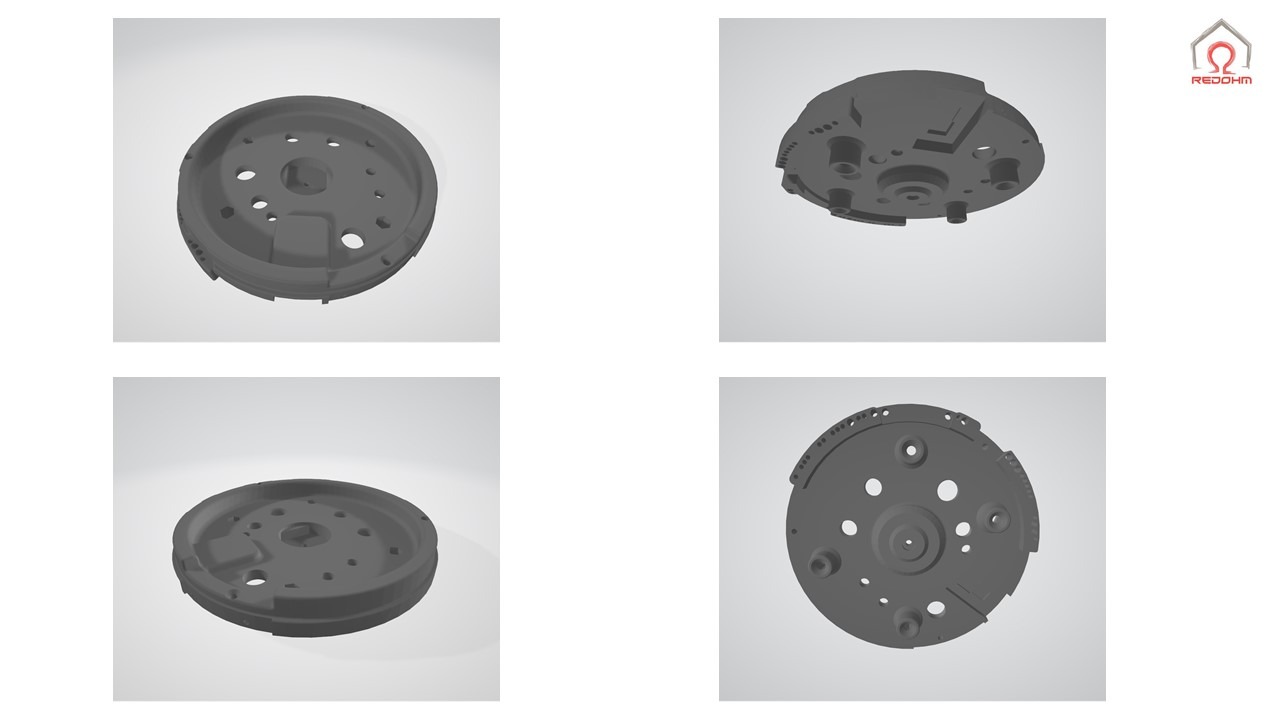
2022-03-13- La création d’un retour d’information |
.
Ce tuto vous explique comment un servomoteur standard peut être transformé en servomoteur possédant une rétroaction.
Vous pouvez peut-être vous poser la question suivante, qu’est-ce qu’une rétroaction ? Une rétroaction, retour d’information, feedback, ces termes définissent la même fonction pour connaître la position du servomoteur par l’intermédiaire d’un capteur qui est le reflet de la position exacte du servomoteur ou de l’actionneur en question Ces informations sont très utiles puisque cela nous permet d’améliorer la stabilité d’un système, ou bien utiliser cette fonction pour pouvoir enregistrer les positions de mouvement de l’actionneur en question.
2022-01-09- Arduino , augmenter le nombre de sortie PWM |
Ce tuto traite d’une carte de commande qui vous permet d’augmenter le nombre de sorties pwm quand votre carte Arduino devient trop juste pour répondre à vos besoins.
La carte de commande de chez Seeedstudio reference 108020102 possedant 16 canaux basée sur un PCA9685 permettant de contrôler jusqu’à 16 servomoteurs ou 16 leds via une liaison PWM. Ce module communique avec une carte Arduino ou compatible via le bus I2C.
Cette carte comporte jusqu’à 6 pontets à souder permettant de raccorder jusqu’à 64 PCA9685 sur un seul bus I2C. Une source d’alimentation externe est nécessaire pour les servomoteurs. Caractéristiques: Alimentation partie logique: 3,3 et 5 Vcc Alimentation partie servomoteur: 2,3 à 5,5 Vcc Commande: via le bus I2C Adresse I2C par défaut: 0x7f (configurable par pontet à souder) Compatible niveaux logiques 5 V Sorties servos/leds: connecteur mâle au pas de 2,54 mm Intensité maxi: – 25 mA par led – 400 mA au total pour tous les servos Dimensions: 65 x 45 x 13 mm
.
Retour au sommaire
.