Archives par étiquette : servomoteur
–
Mise à jour le 08/12/2019 : Dans cet article, vous est présenté le Servomoteur contrôle un système de pilotage multi servomoteurs, avec la possibilité de régler la vitesse de chaque servomoteur en mode automatique.
Rep 01 – Plaque coffret Bas pupitre – RedOhm
![]() .
.
Pour tout problème |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour à la page principal
–
Mise à jour le 30/06/2019 : Dans cet article, vous est présenté le Servomoteur contrôle un système de pilotage multi servomoteurs, avec la possibilité de régler la vitesse de chaque servomoteur en mode automatique,mais la partie la plus polyvalente étant son coffret , une réalisation en #impression3d
Mise à jour le 29/12/2019 :Dans cette rubrique , la foire aux questions , nous traitons d’un grand nombre de questions génériques traitant des différents problèmes rencontrés en robotique .
***
Maya la passion de bien faire – RedOhm
Mise à jour le 09/08/2017
Sommaire :
- 31/01/2017 Etude des bras et avant bras ( Diaporama )
- 04/02/2017 Etude et réalisation du support carte pour la version 1.00 de Maya
- 10/02/2017 Suite de l’étude des bras et avant bras avant essais
- 12/02/2017 L’étude se poursuit sur le réalisation du bras ( Diaporama )
- 18/02/2017 L’étude de la partie mécanique du coude ( plan mécanique )
- 20/02/2017 Etat de l’avancement de la rotation du poignet ( Diaporama )
- 24/02/2017 Rotation du thorax et motorisation de celui-ci et réservation dans le buste pour l’installation d’un pico-projecteur ( Photo )
- 25/02/2017 Schéma de principe du circuit de contrôle ( Photo du schéma de principe )
- 18/03/2017 Impression du haut du bras ( Diaporama )
- 19/03/2017 Modification de la rotation du buste ( Photo et diaporama )
- 08/04/2017 Essai du bras de Maya.
- 22/04/2017 Fonctionnement manuel des différents mouvements de la tête ( Vidéo ) .
- 29/04/2017 Maya un robot avec de la voix ( Photo ) .
- 06/05/2017 Maya groupe de propulsion châssis M001 ( Photo ).
- 11/06/2017 Coffret tuning pour variateur de propulsion ( Diaporama ).
- 06/08/2017 Présentation du châssis extérieur pour Maya ( Vidéo ) .
- 08/08/2017 Vue du fonctionnement de la main de Maya ( Vidéo ) .
| Retour au sommaire principal |
![]()
31/01/2017 Etude des bras et avant bras |
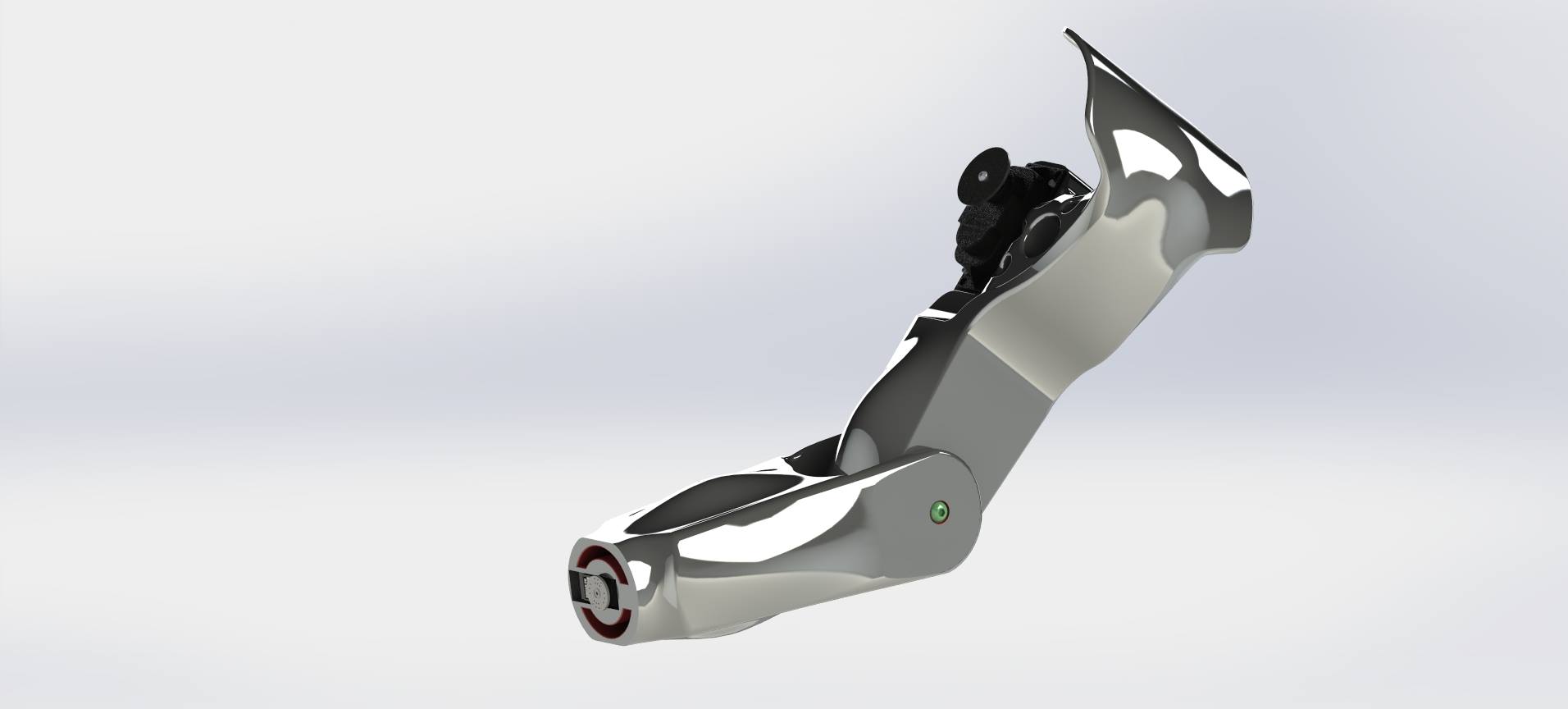
Voici la suite de l’étude de la partie du bras et avant bras de Maya. Comme vous avez pu l’observer sur le dessin les servomoteurs sont en entraînement direct. Le bras est rattaché à l’épaule par un servomoteur en entraînement direct (les seules démultiplications sont à l’intérieur du servomoteur).Celui-ci assurera la rotation de l’épaule, un second servomoteur monté dans la cage de l’épaule assurera l’élévation du bras. Le type de servomoteur choisi nous permettra de porter des charges relativement conséquentes (les tests nous confirmeront le poids des charges déplacées).
Etude des bras et avant bras du robot Maya – RedOhm
–
En voir plus , diaporama des bras et avant bras état du projet au 31/01/2017
–
| Retour au sommaire |
![]()
04/02/2017 Etude et réalisation du support carte
|
Maya support carte Arduino Version 1.00 ( position de carte dans la boite crânienne ) – RedOhm -003
Maya soutien carte arduino Version 1.00 – RedOhm -002
Maya soutien carte arduino Version 1.00 – RedOhm -001
| Retour au sommaire |
![]()
10/02/2017 Suite de l’étude des bras et avant bras avant essais |
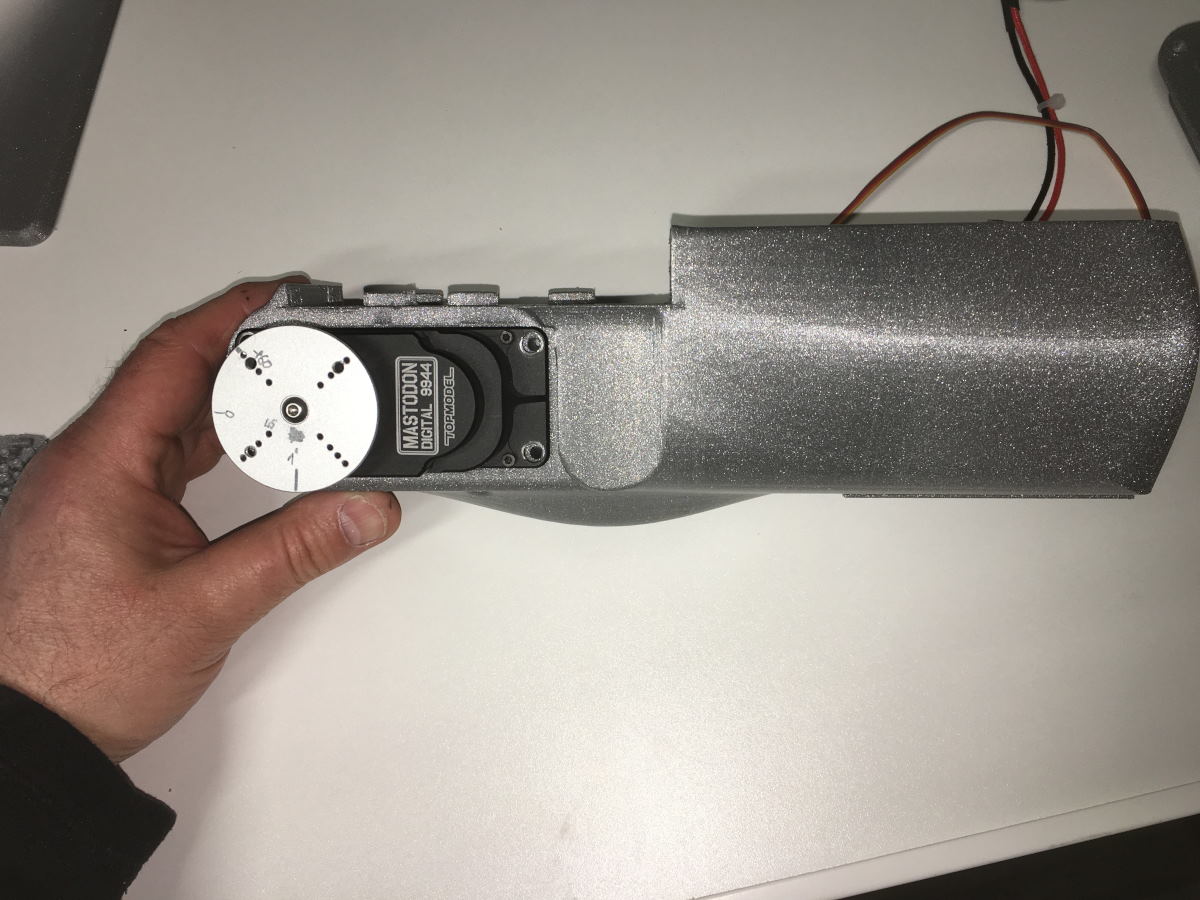
Nous voilà à une étape très importante, la fabrication des bras, l’étude étant terminée, nous allons commencer l’impression pour tester la résistance et la mobilité de l’ensemble. La motorisation du haut du bras est assurée par un servomoteur Mastodon 9944 de la marque Topmodel . Ce matériel est disponible chez le distributeur France robotique, Il développe une poussée de 99 kg.cm et affiche une excellente performance. Sur ce matériel, pour avoir le couple maximal, il faudra construire une alimentation de 7.4 V de façon à optimiser le couple de sortie. La partie de l’avant-bras est motorisée par un servo de marque Hitec HS805BB, il développe un couple de 24 kg.cm. Un seul bémol à ce choix et le coût des servomoteurs Mastodon, il sera donc prévu une motorisation avec des servomoteurs moins chers mais évidemment avec des performances plus modestes.

_
Les informations sur les servomoteurs sur -> Les servomoteurs
| Retour au sommaire |
![]()
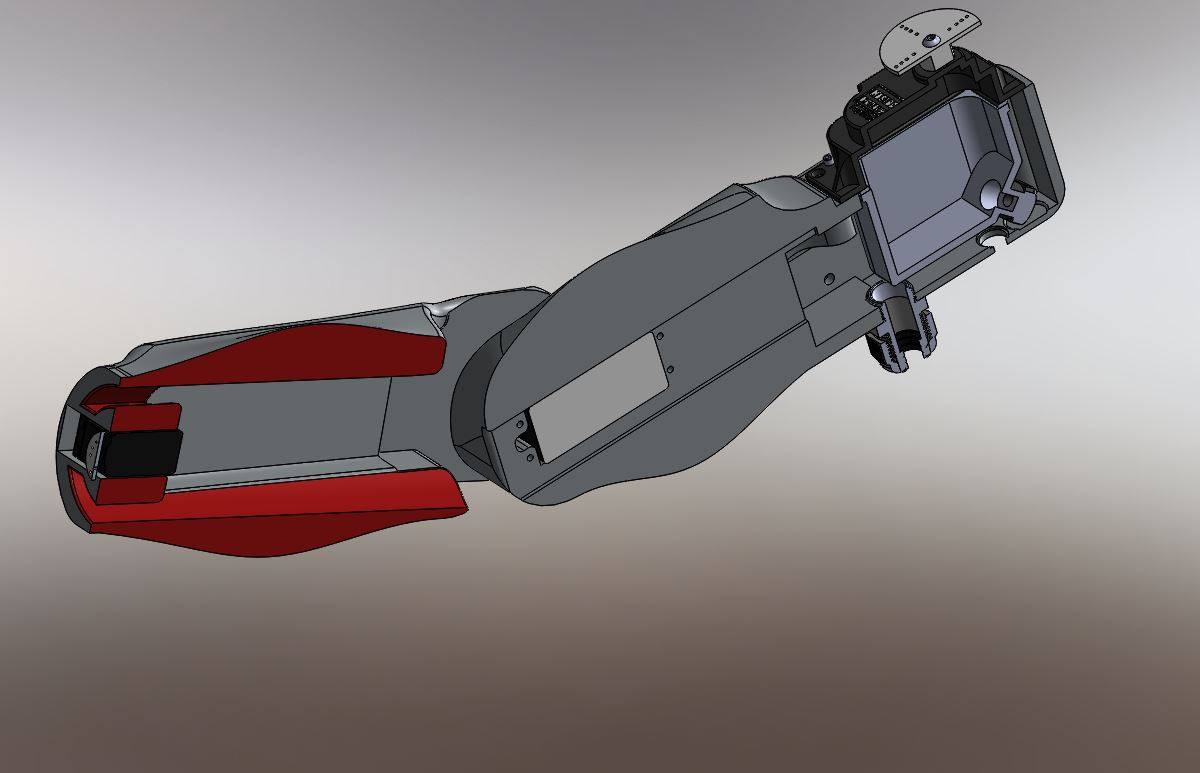
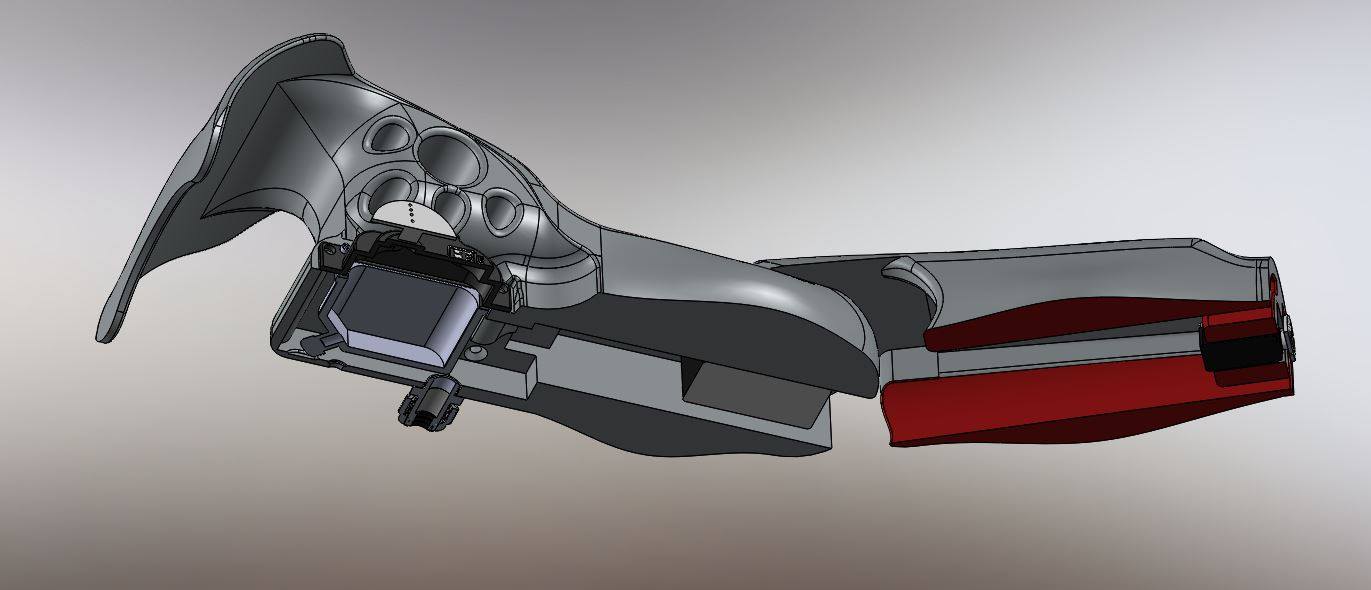
12/02/2017 L’étude se poursuit sur le réalisation du bras |
L’étude se poursuit sur notre robot Maya. Après l’étude du bras et de l’avant-bras terminé, voici maintenant la rotation poignée. La rotation poignée sera motorisée avec un servomoteur de type Hitec 645 MG. Voici un bref rappel des différents servo qui composent le bras, nous avons donc un Mastodont 9944 pour le haut du bras, pour le coude nous avons un servomoteur Hitec HS805BB.
Il sera prévu des motorisations différentes et surtout moins onéreuses, mais je pense avec des performances plus modestes.
Robot Maya état au 12/02/2017 – RedOhm


–
| Retour au sommaire |
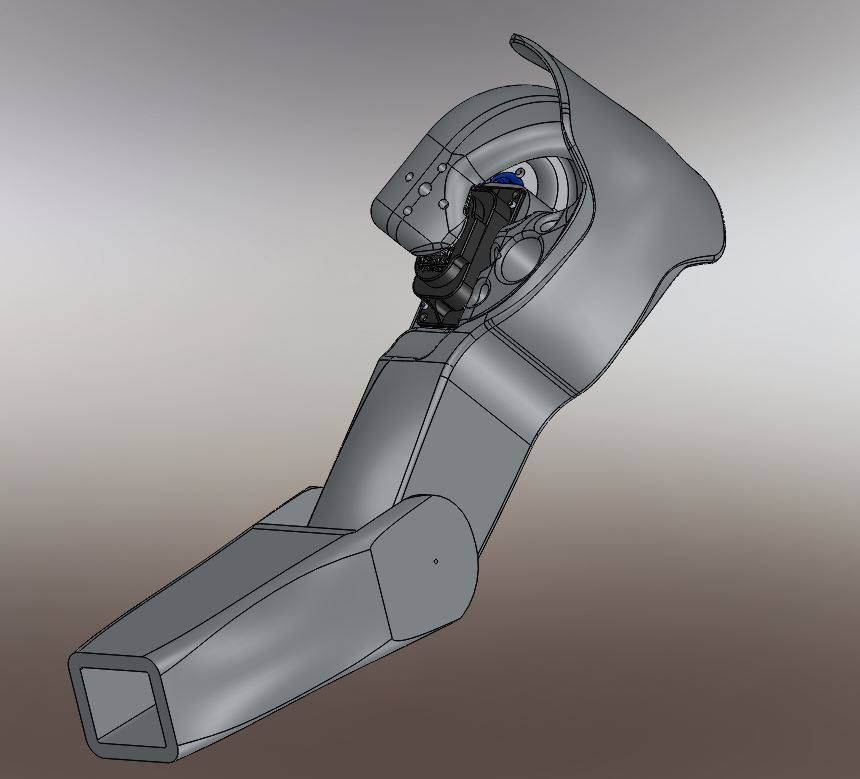
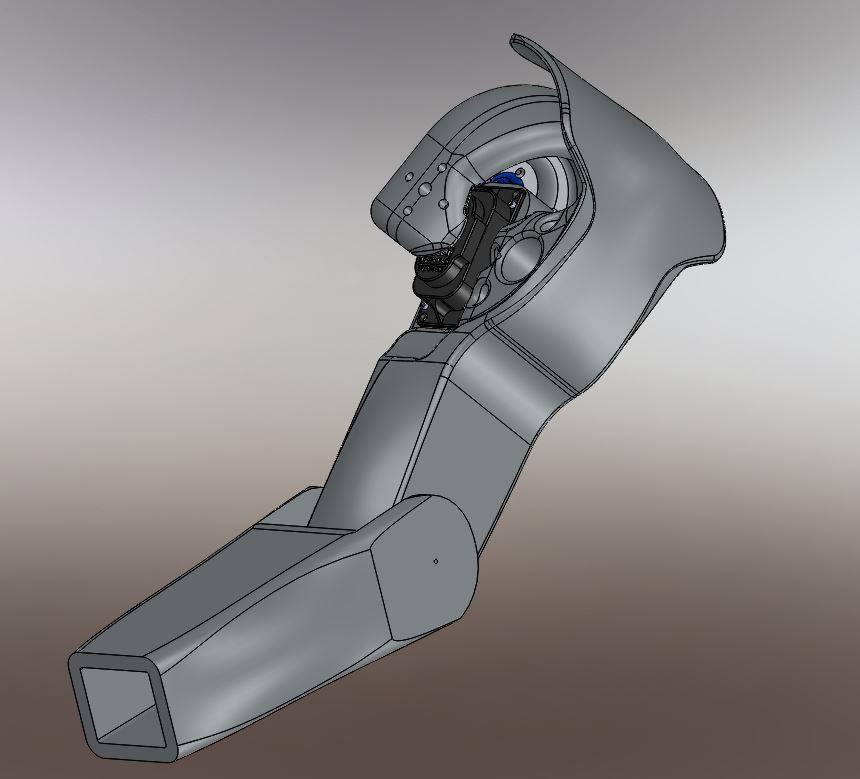
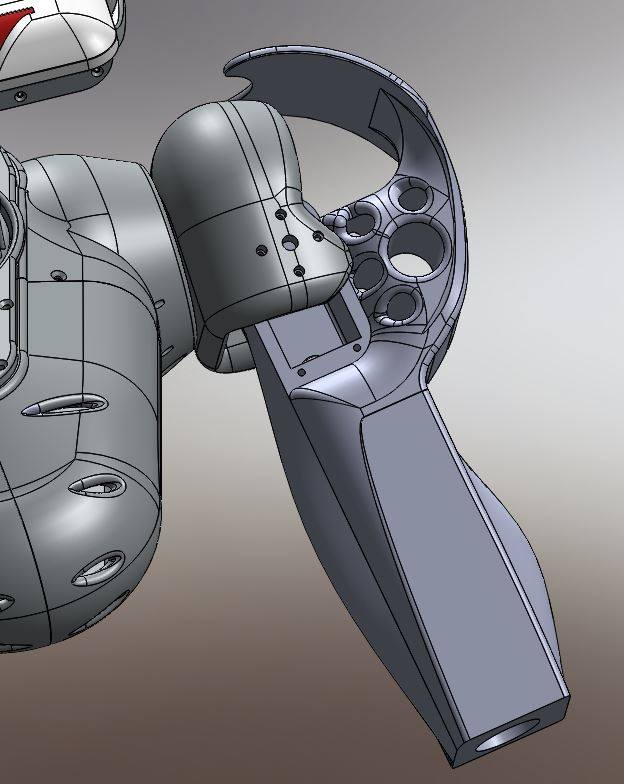
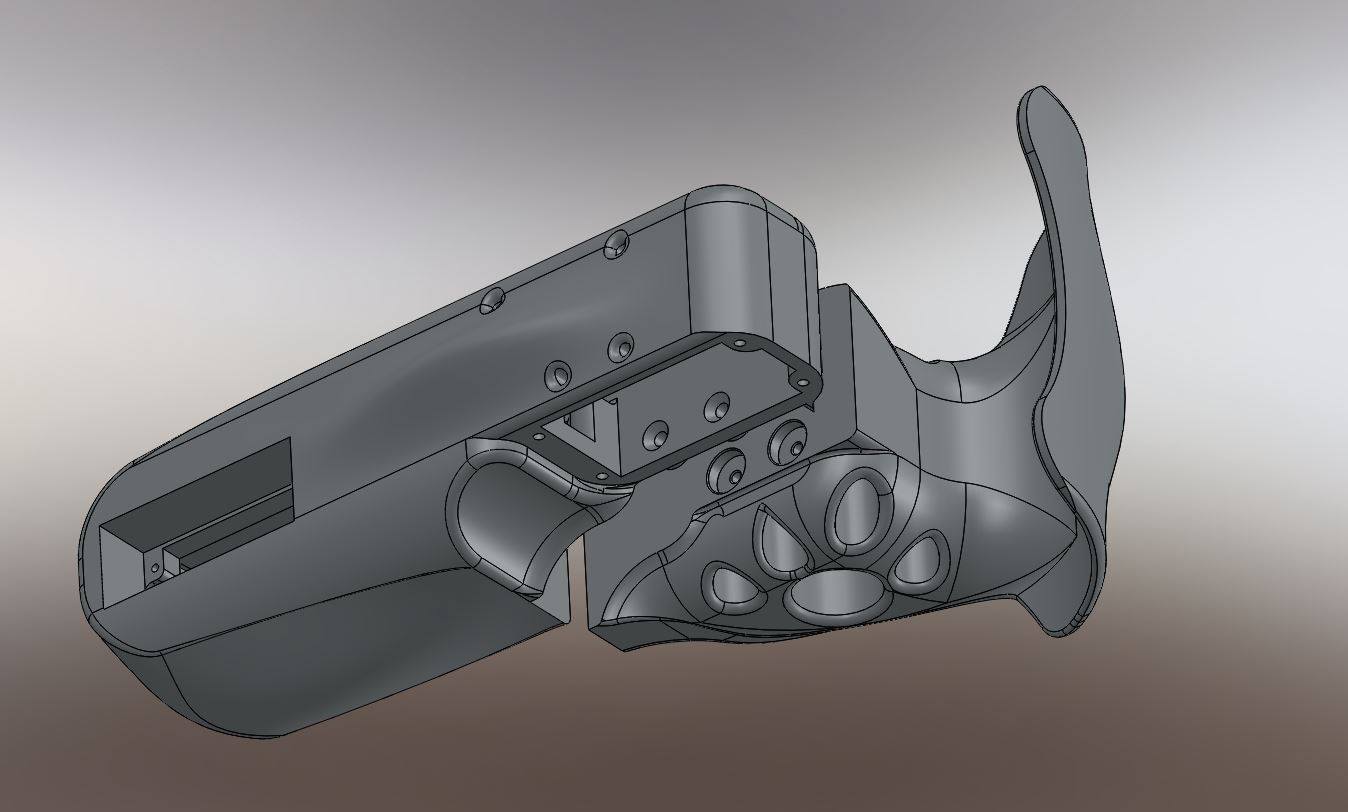
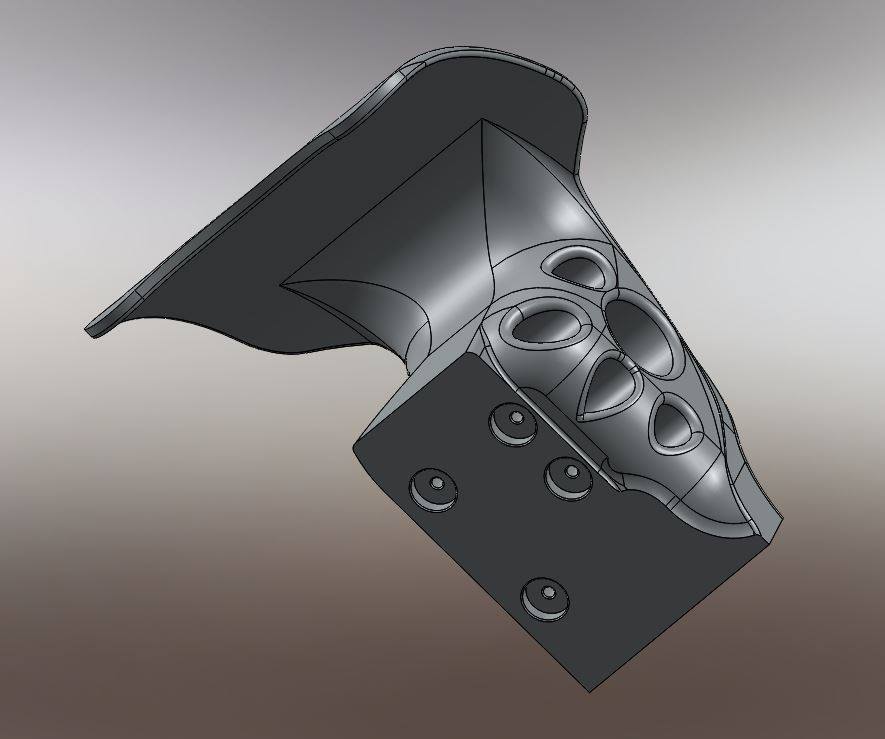
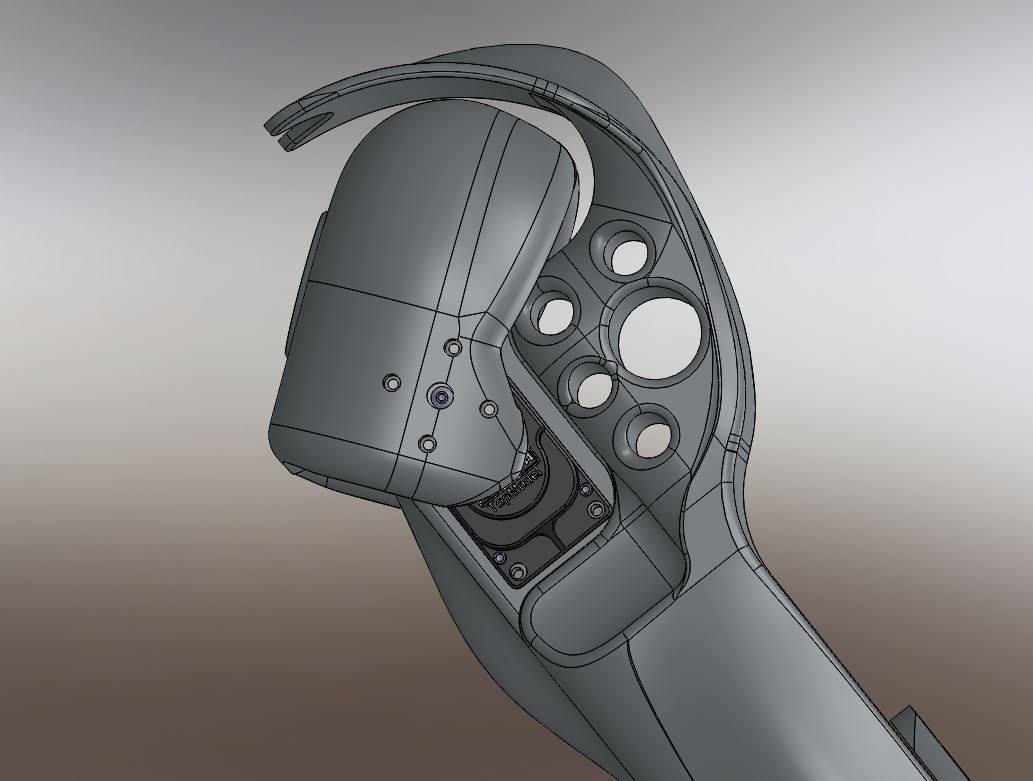
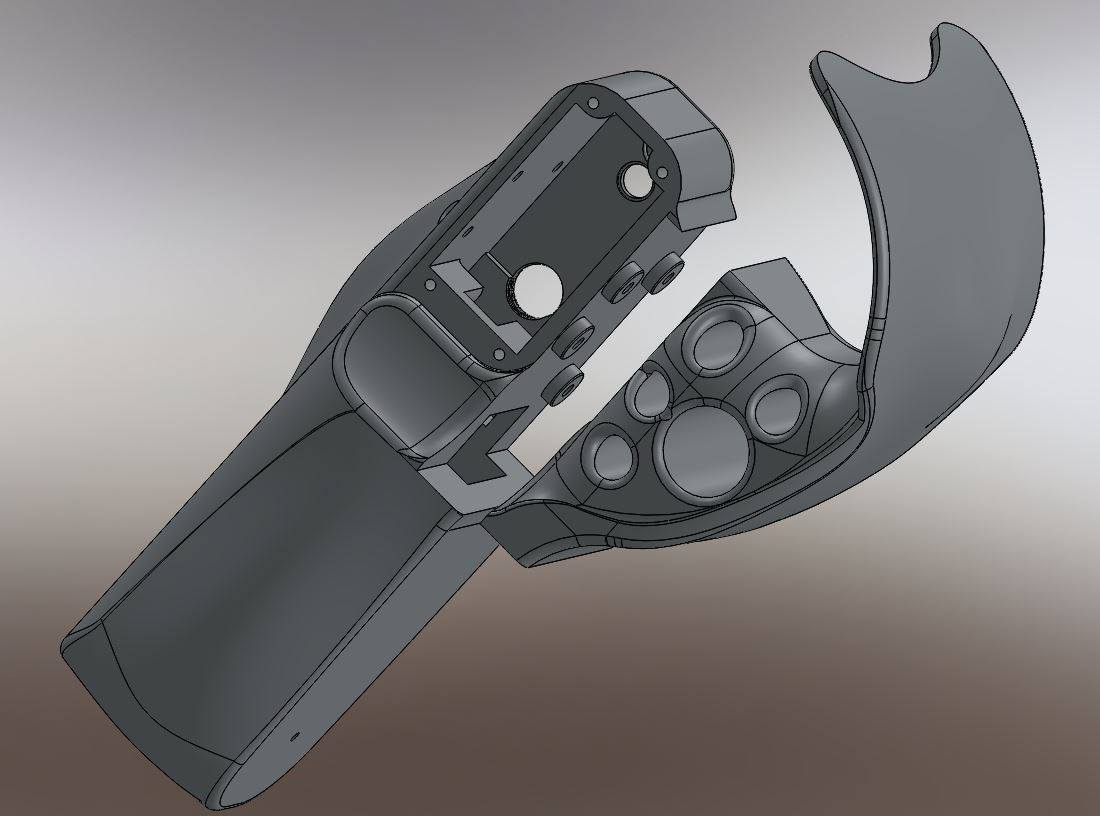
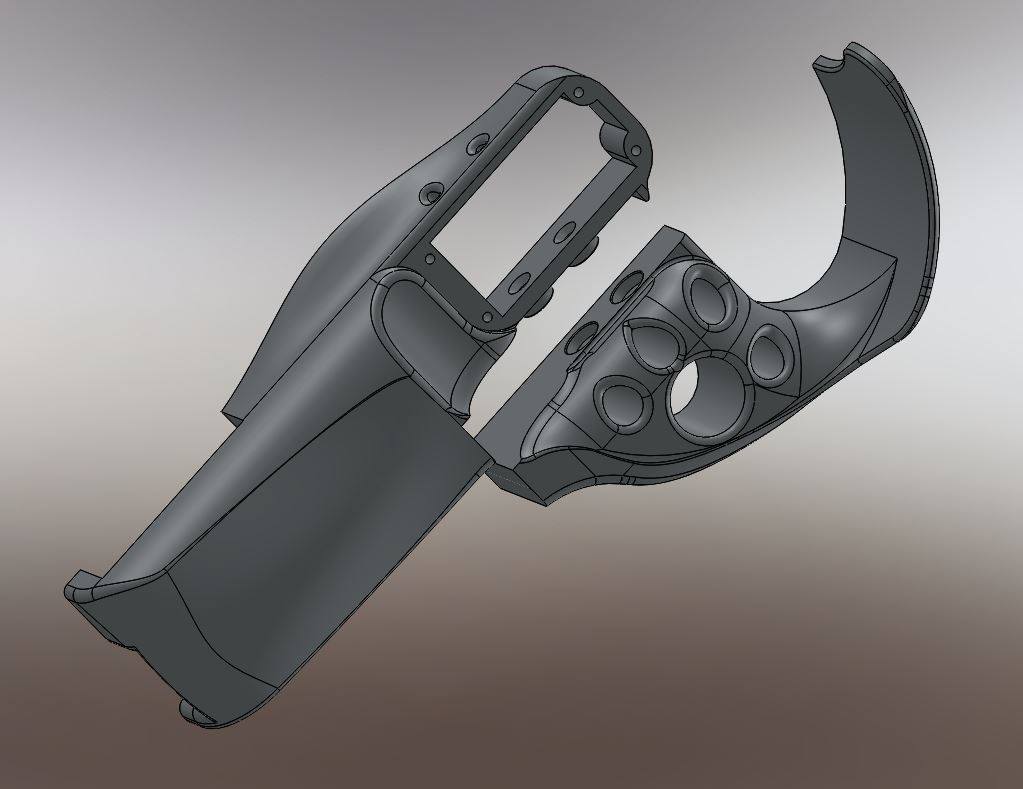
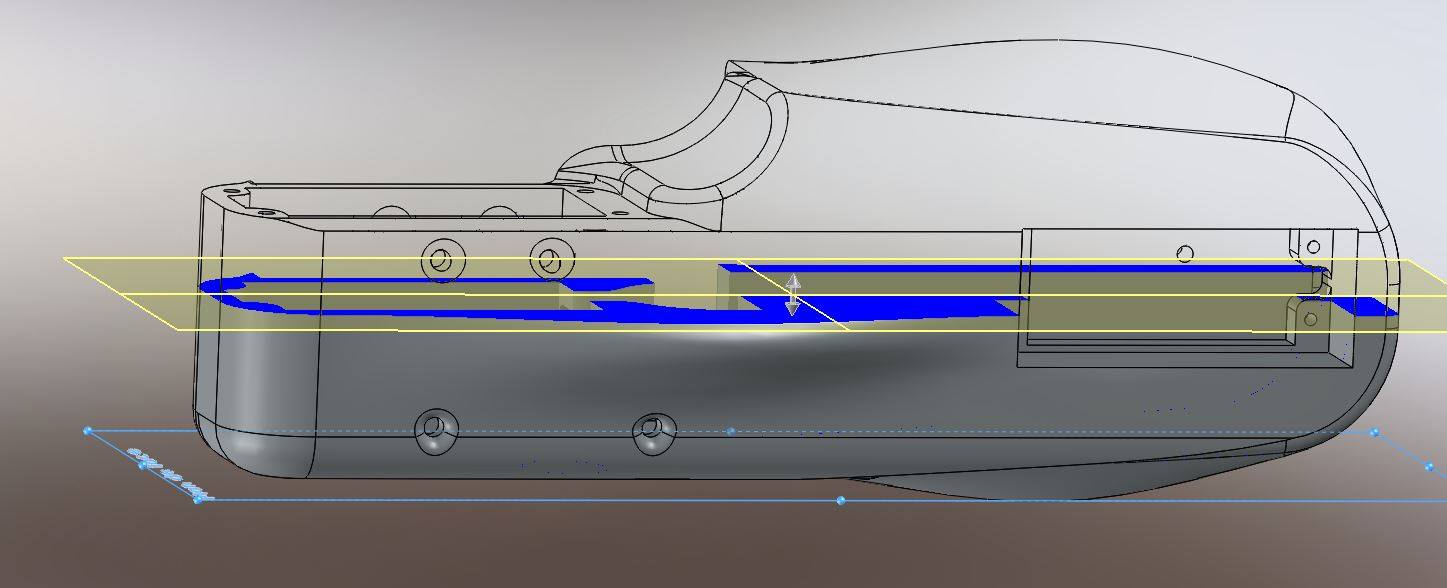
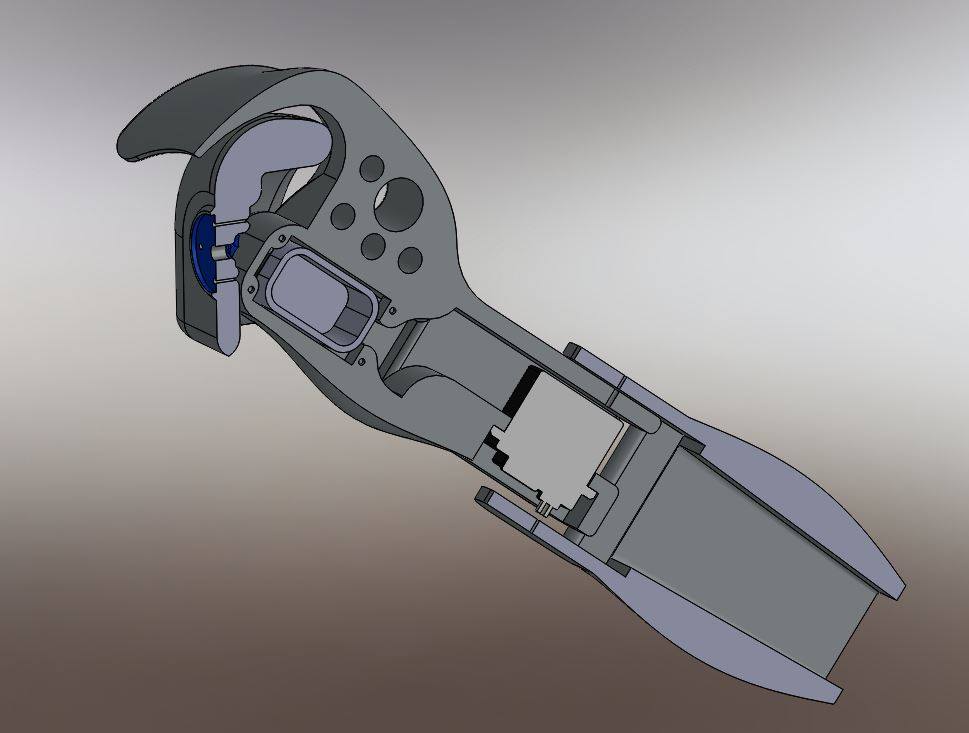
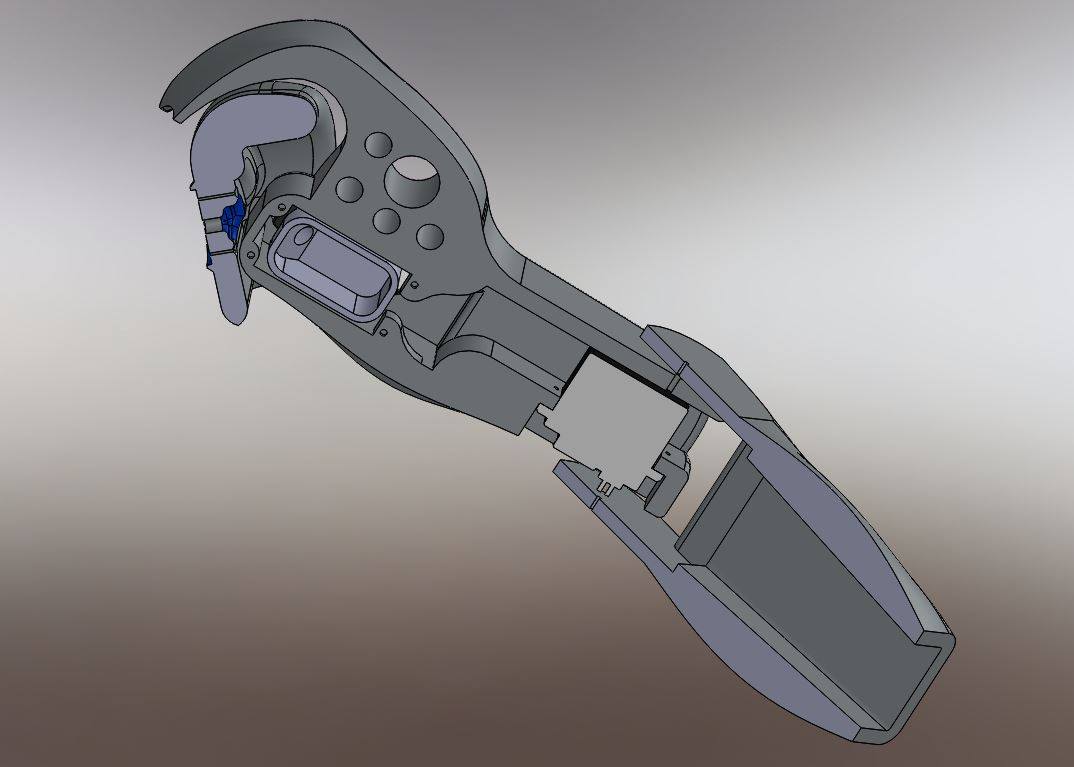
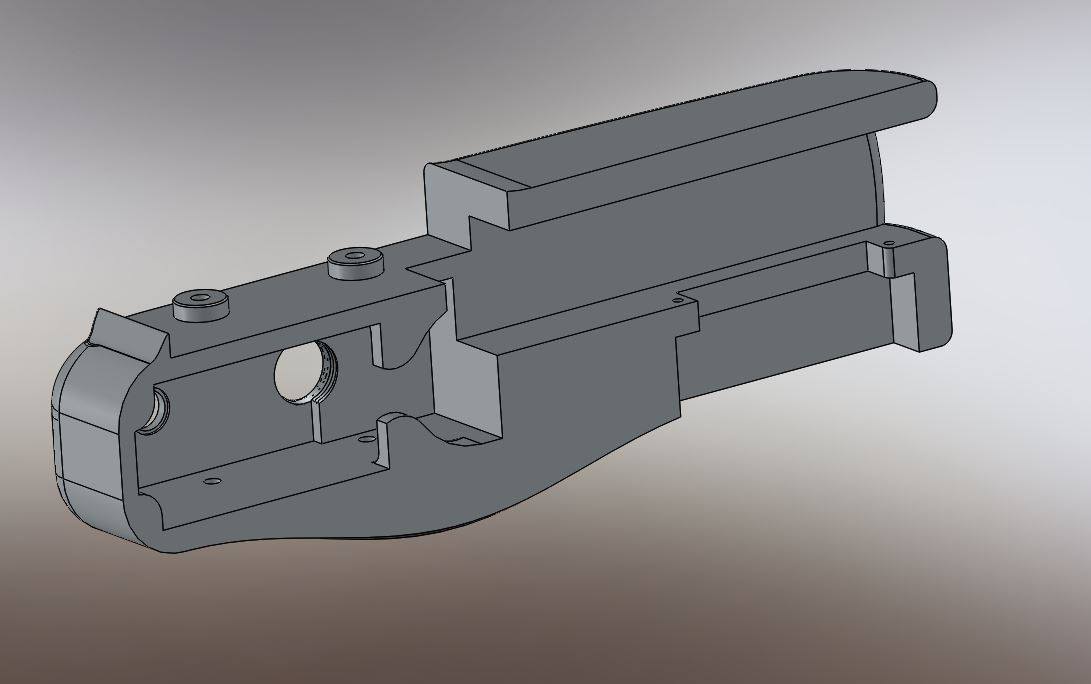
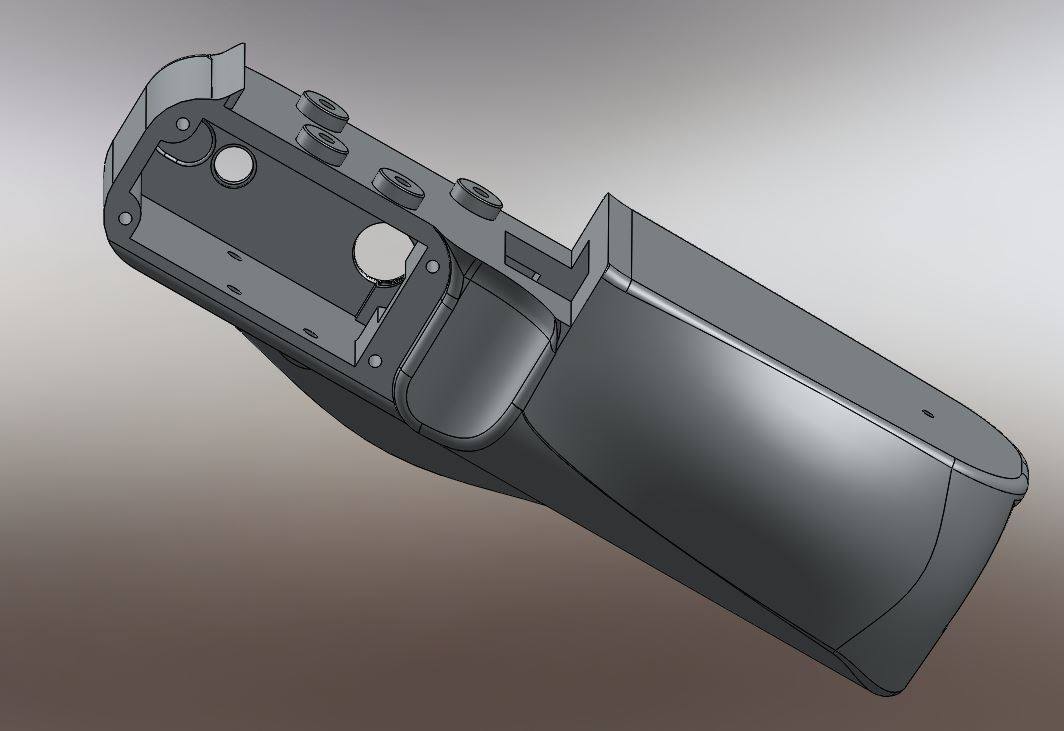
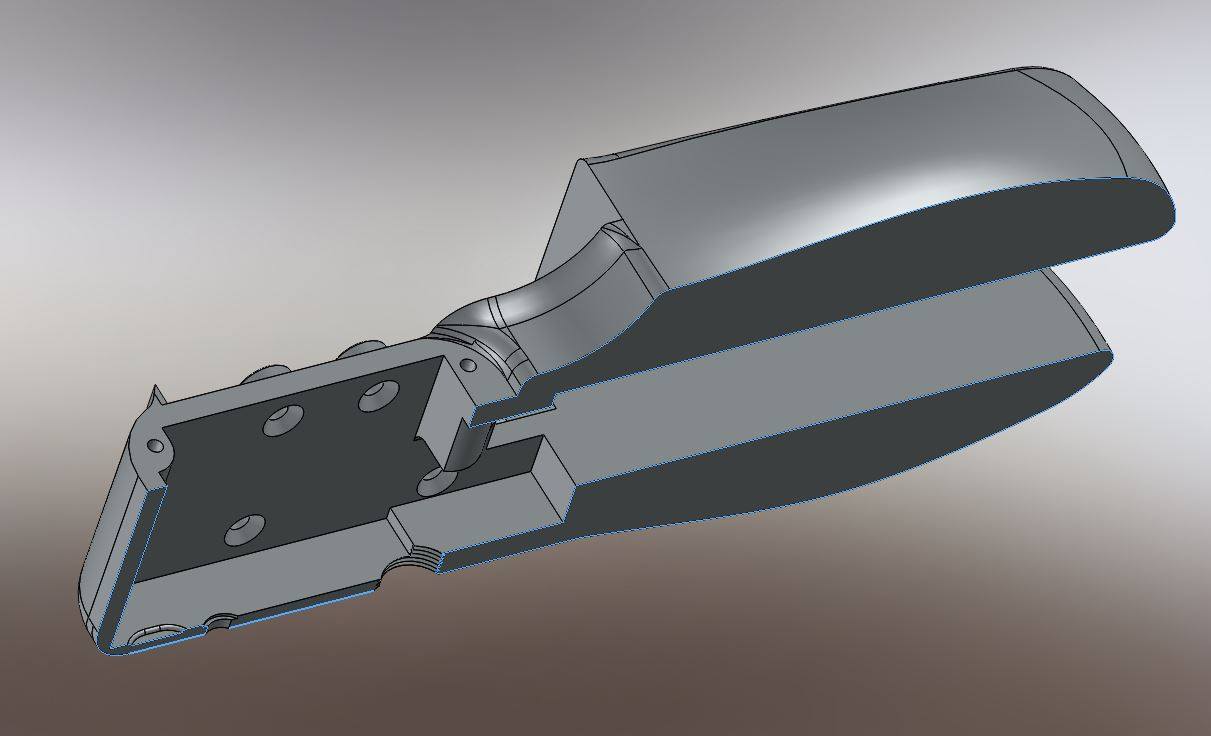
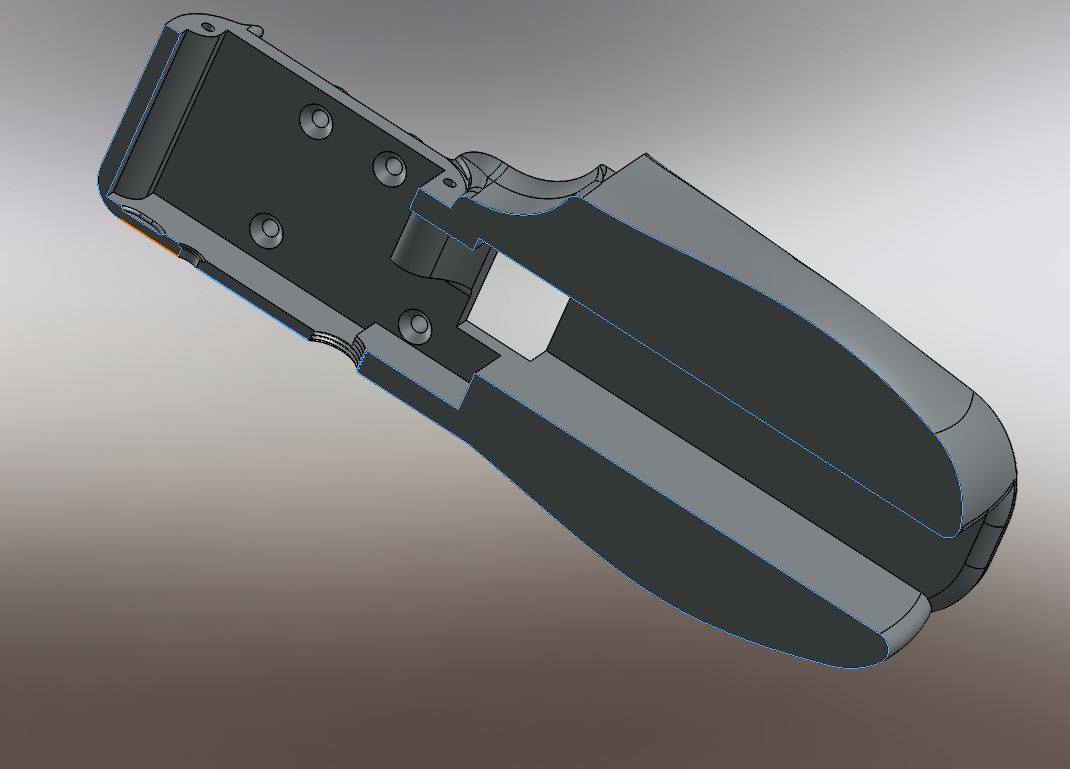
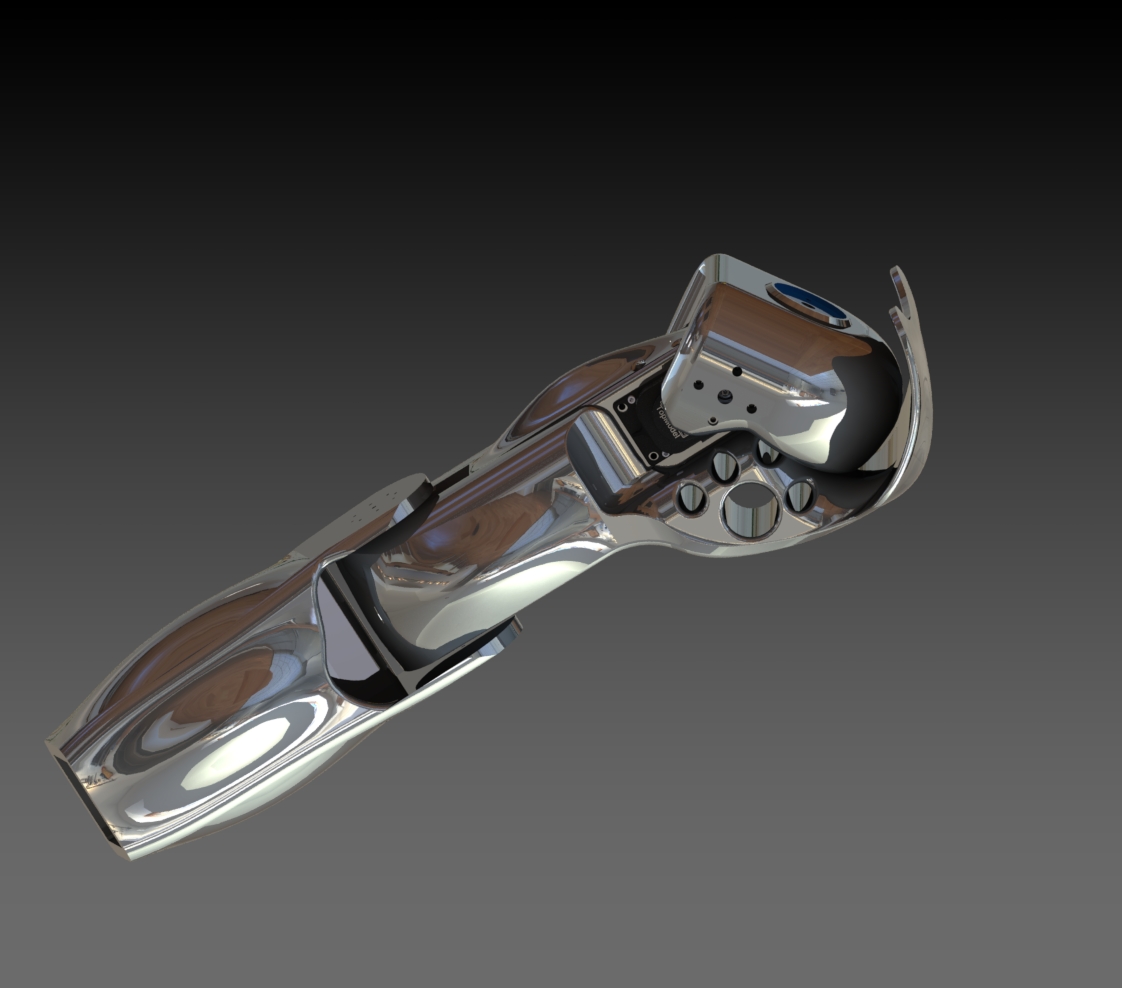
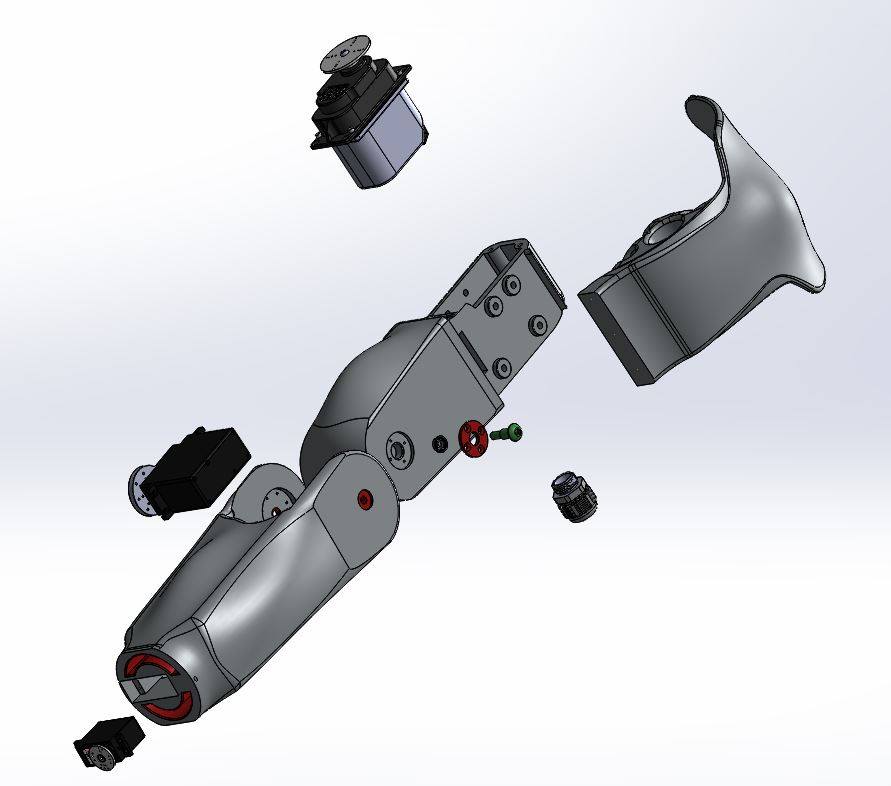
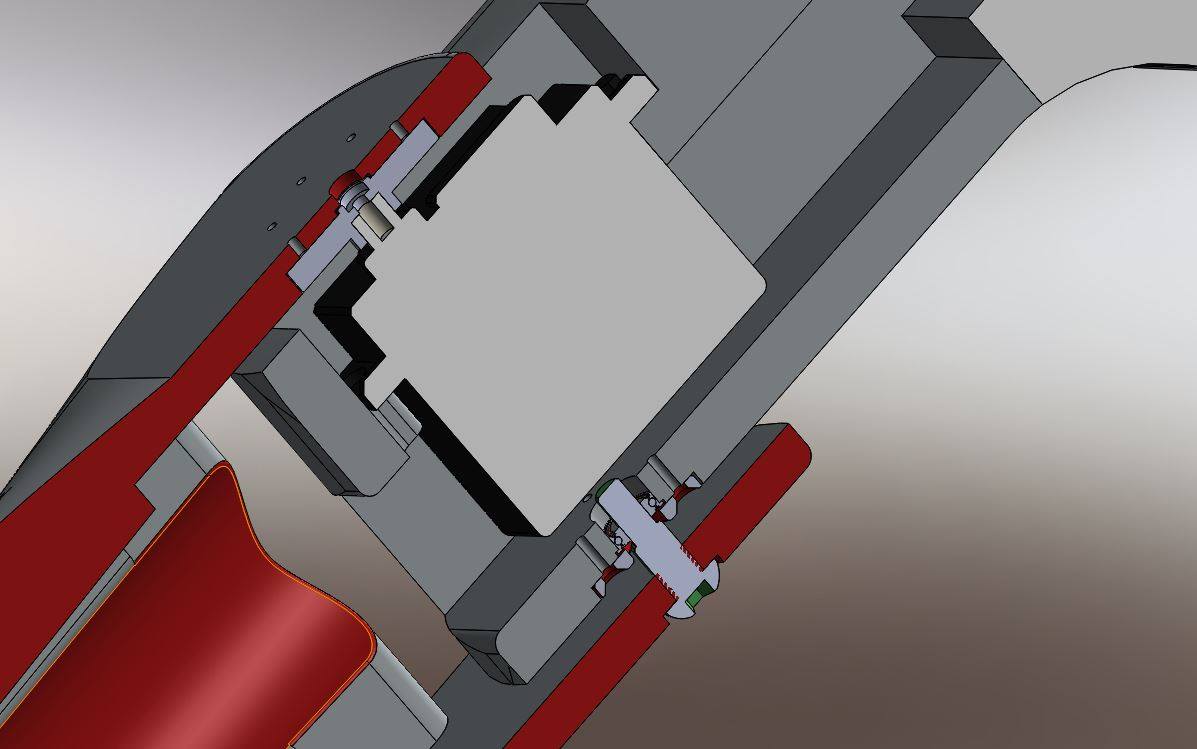
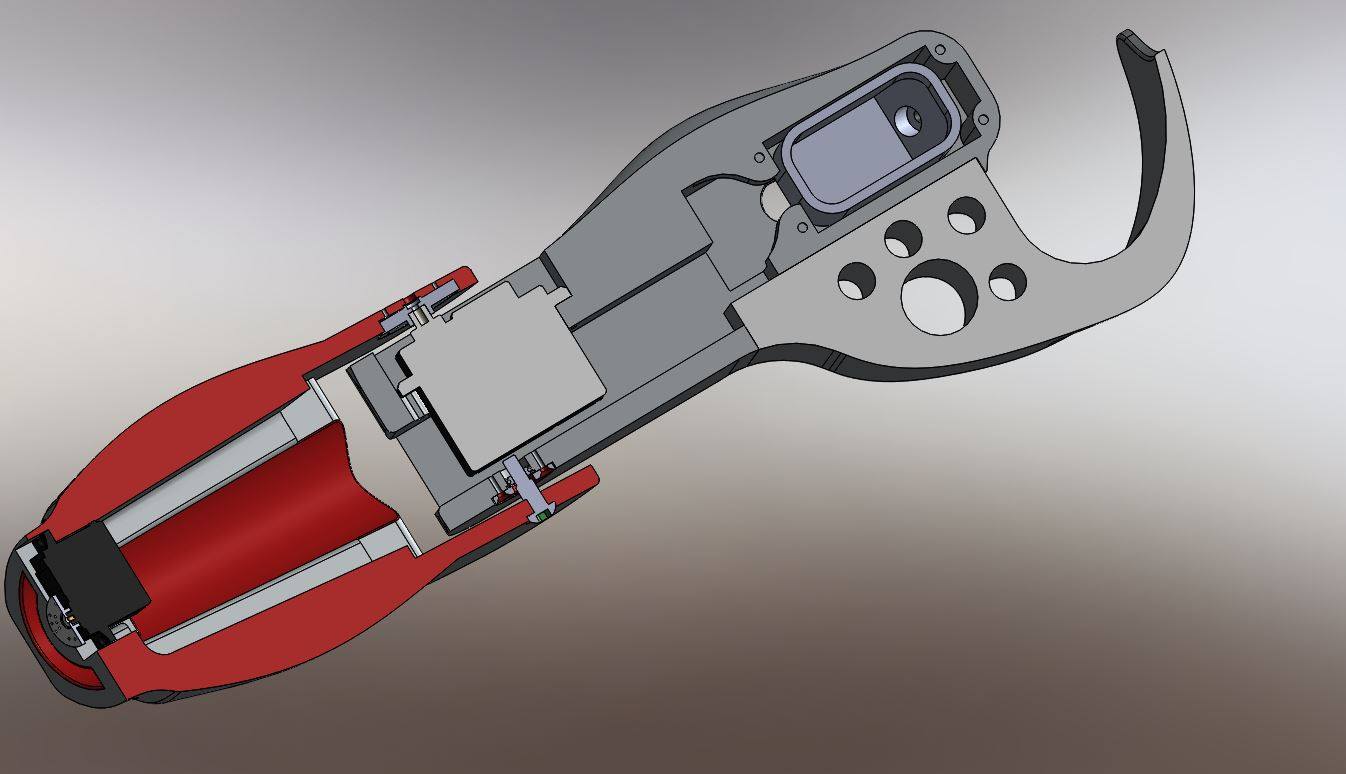
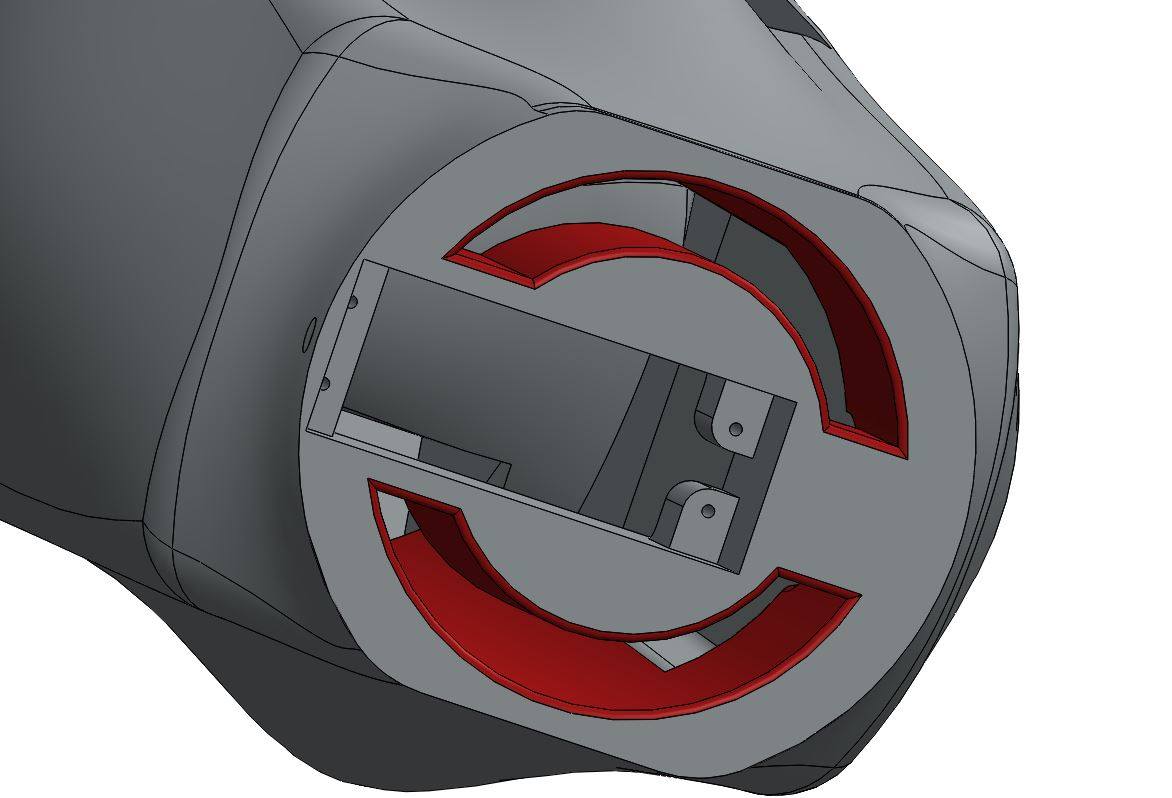
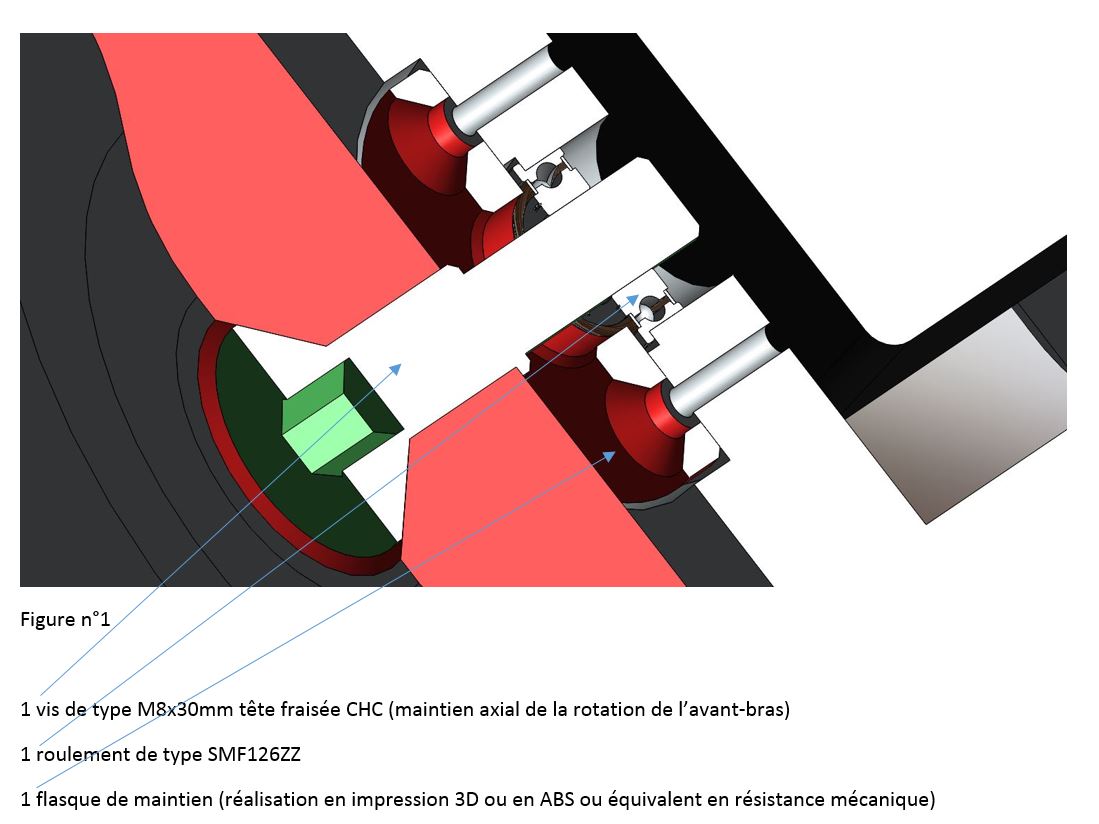
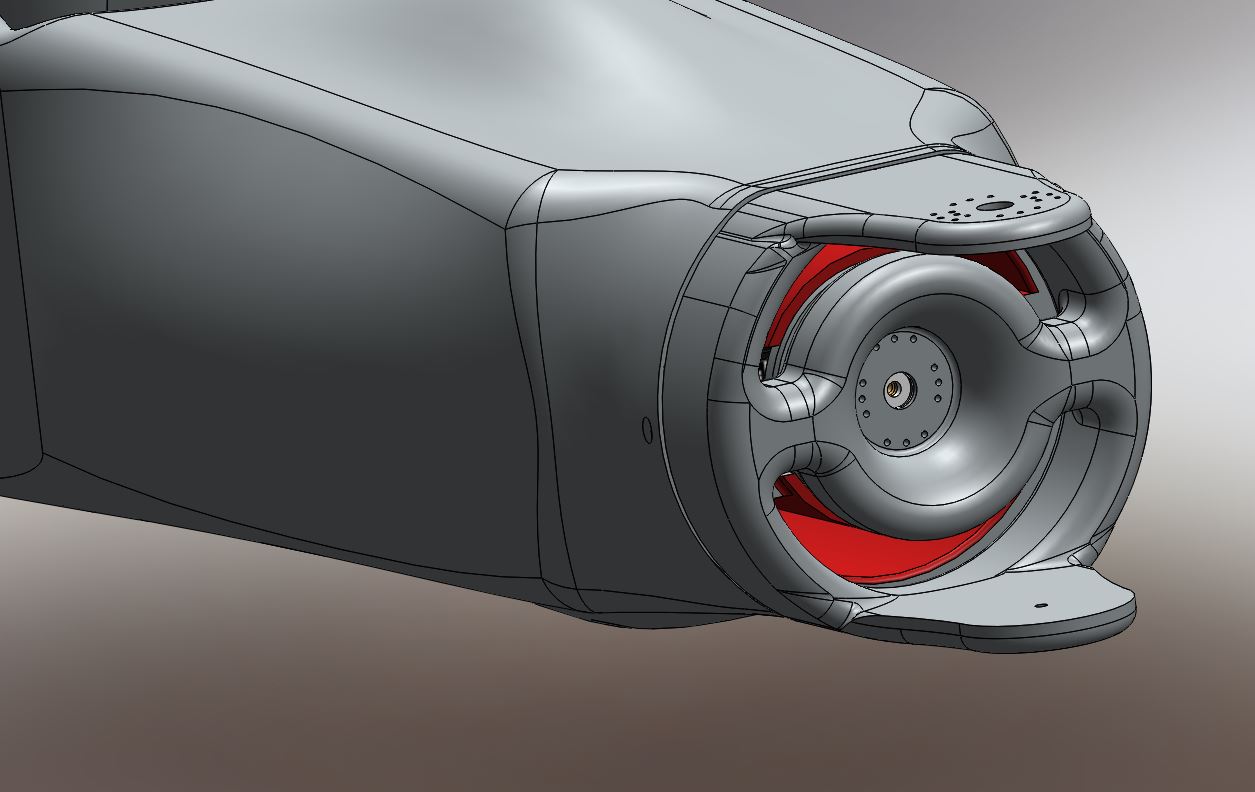
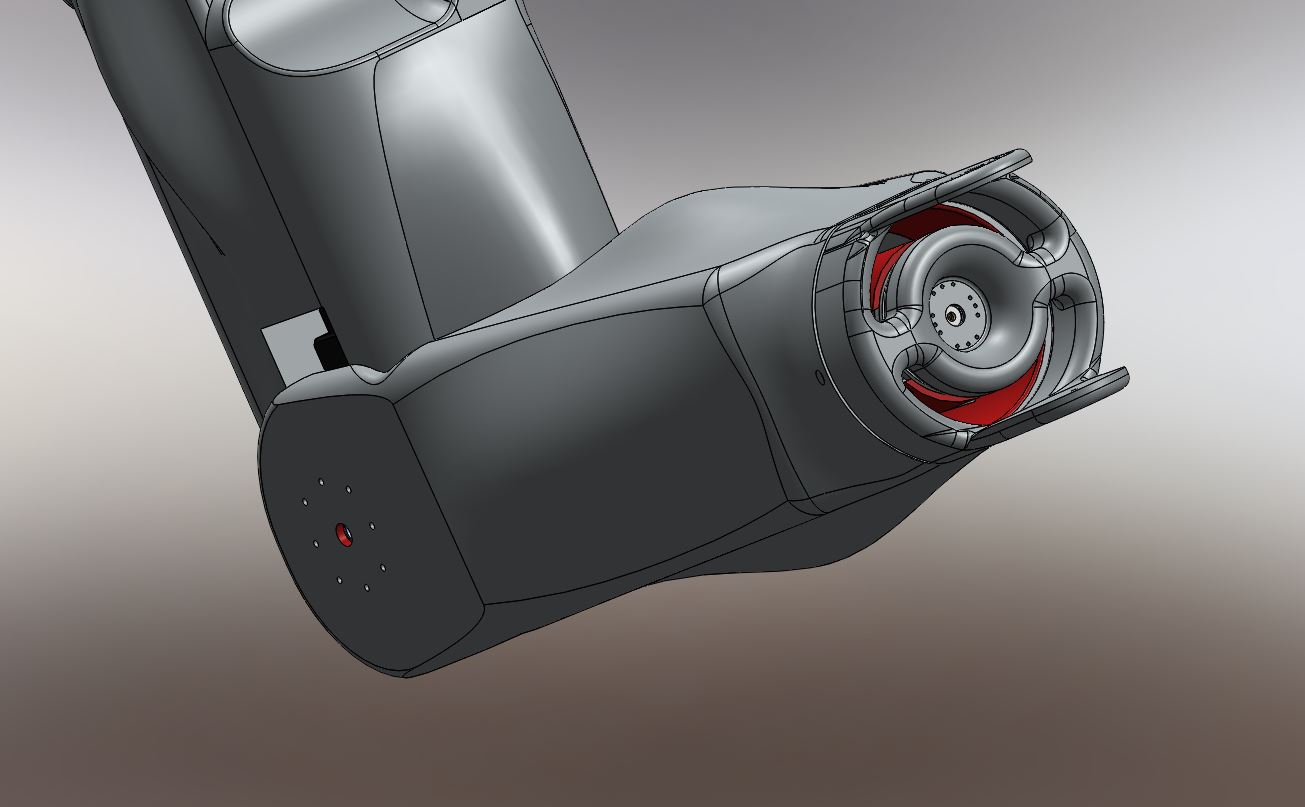
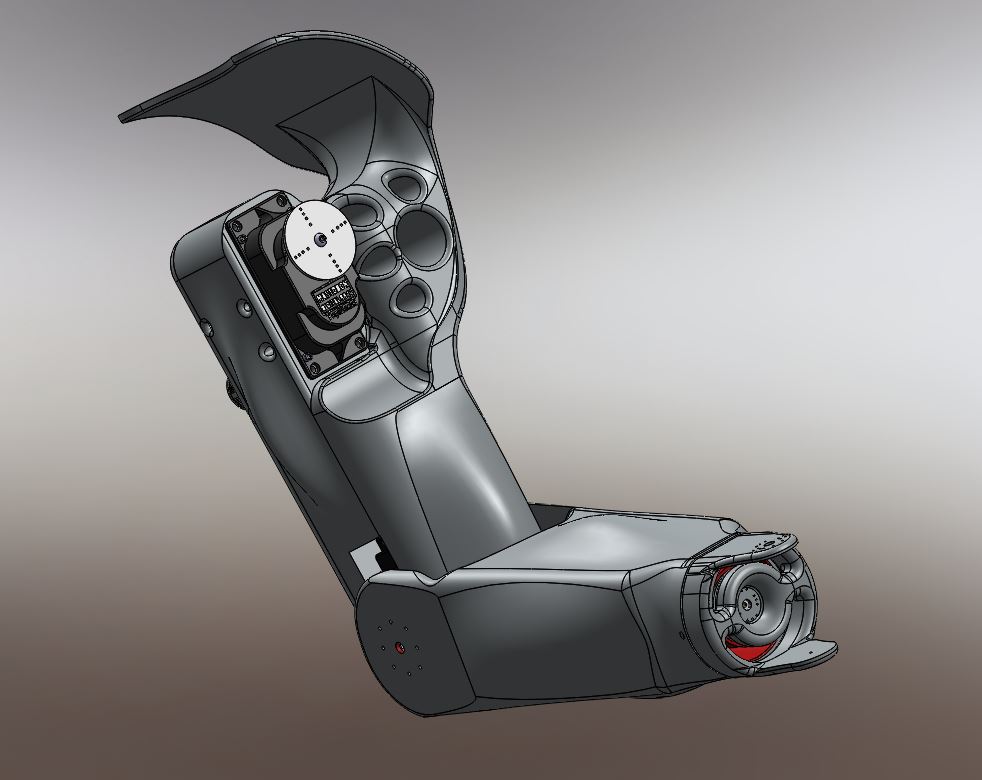
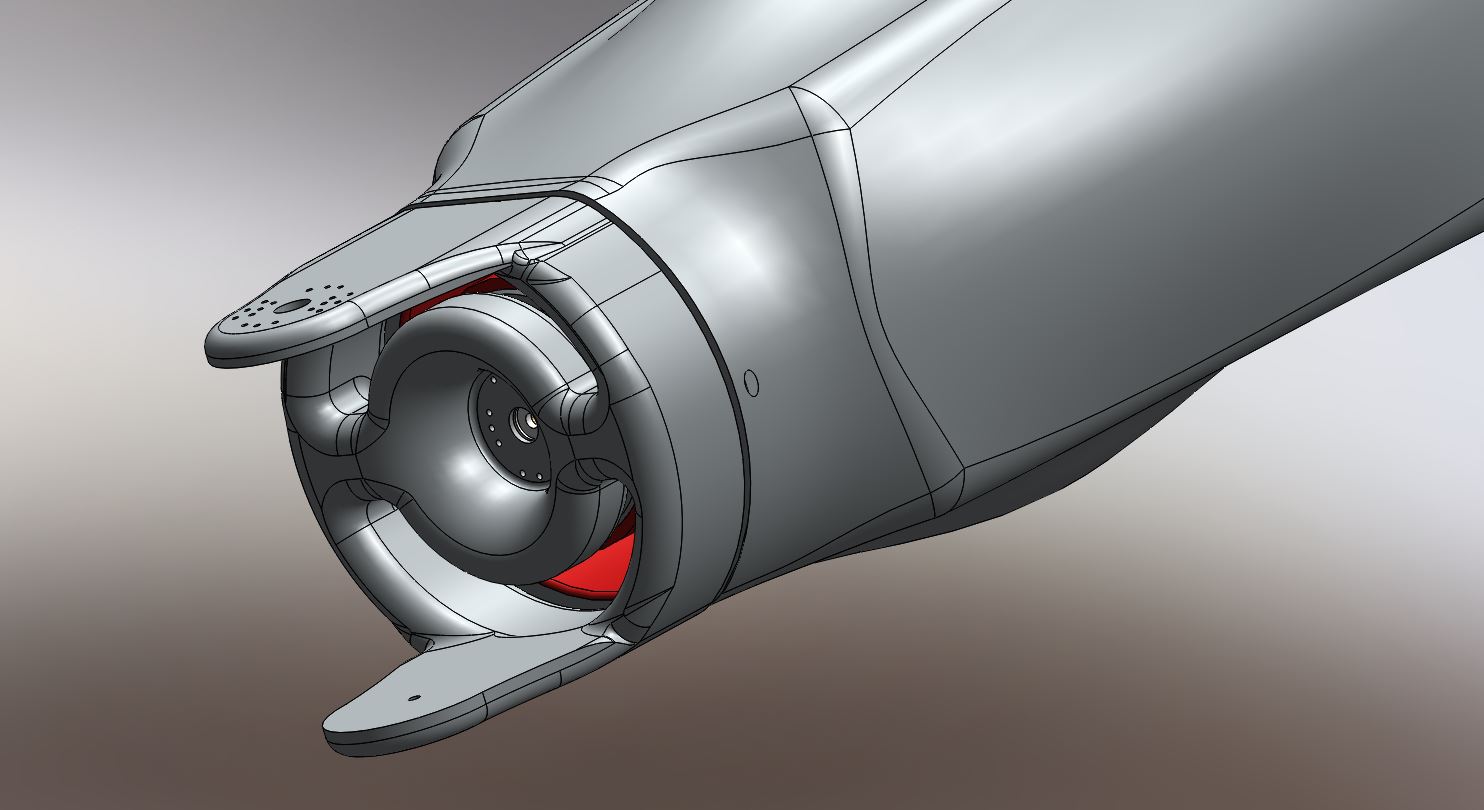
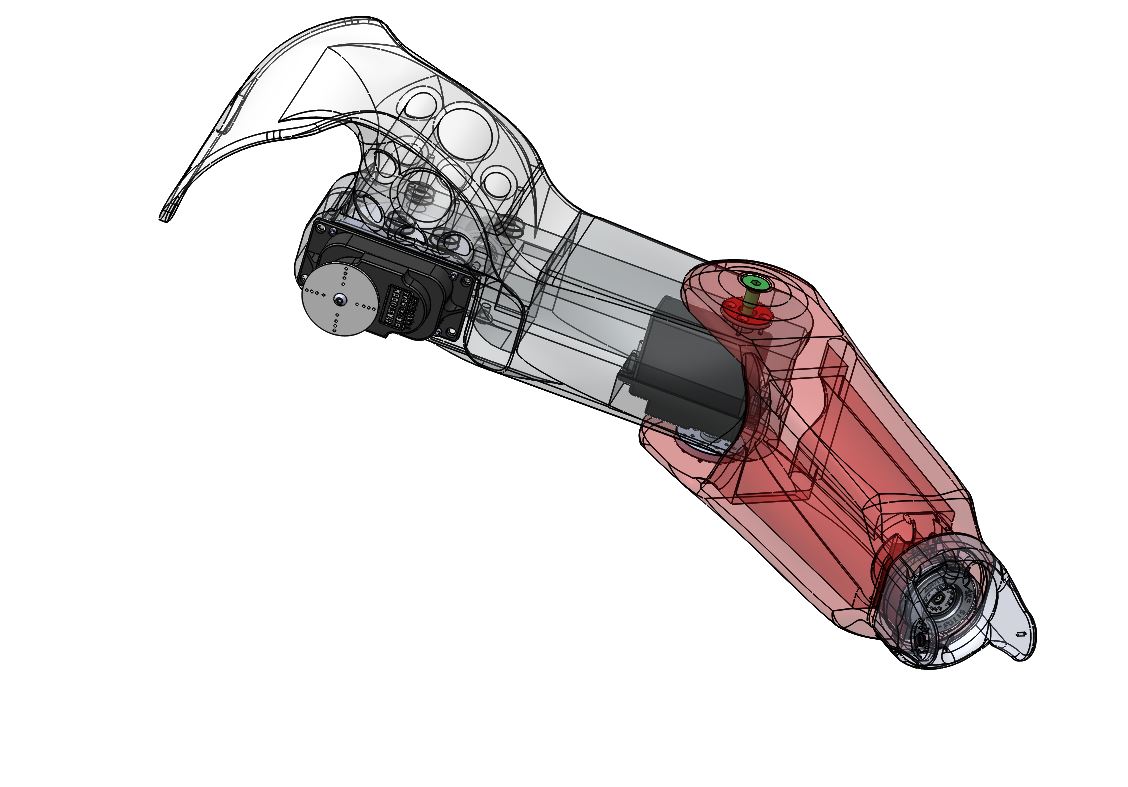
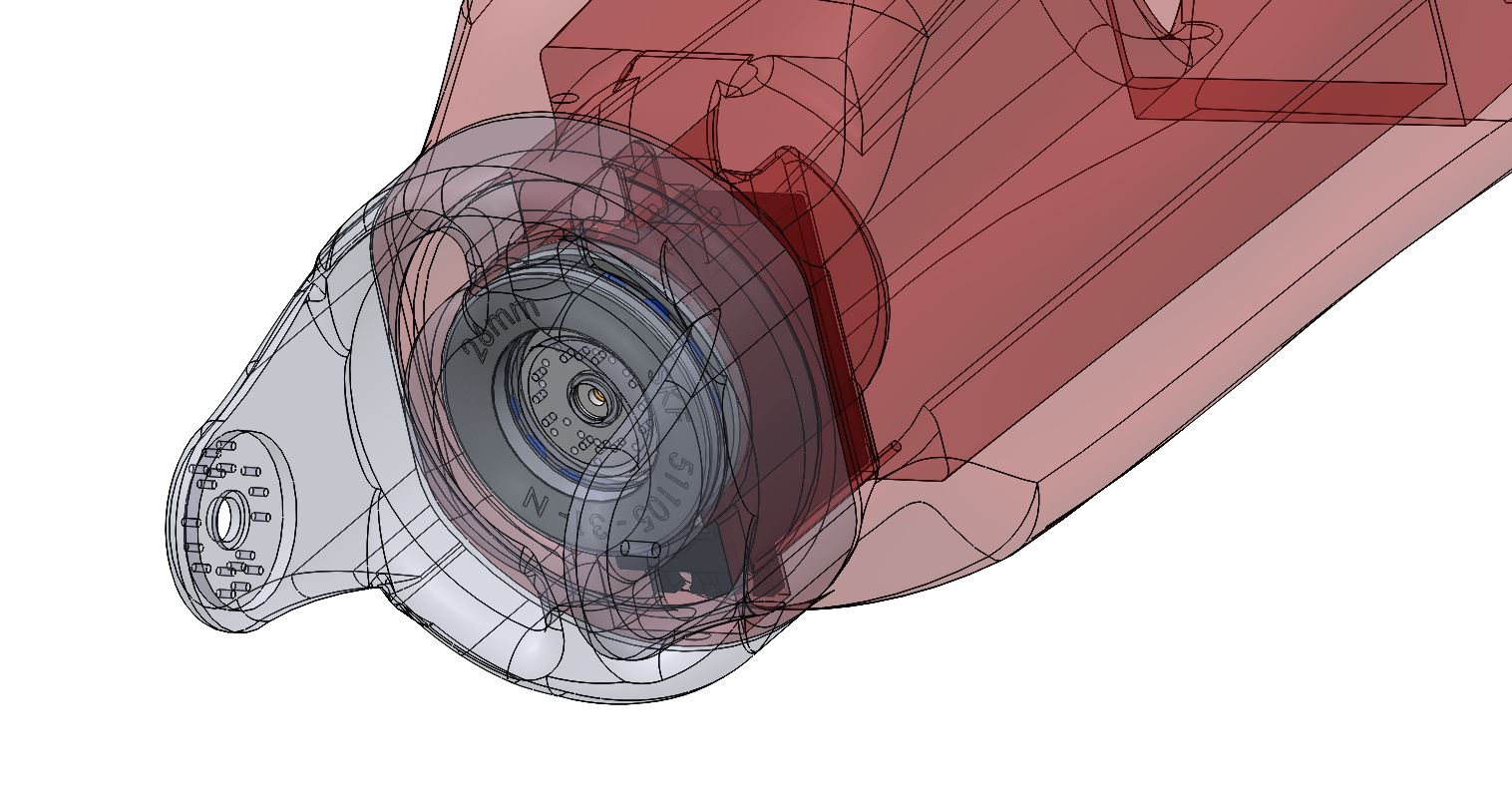
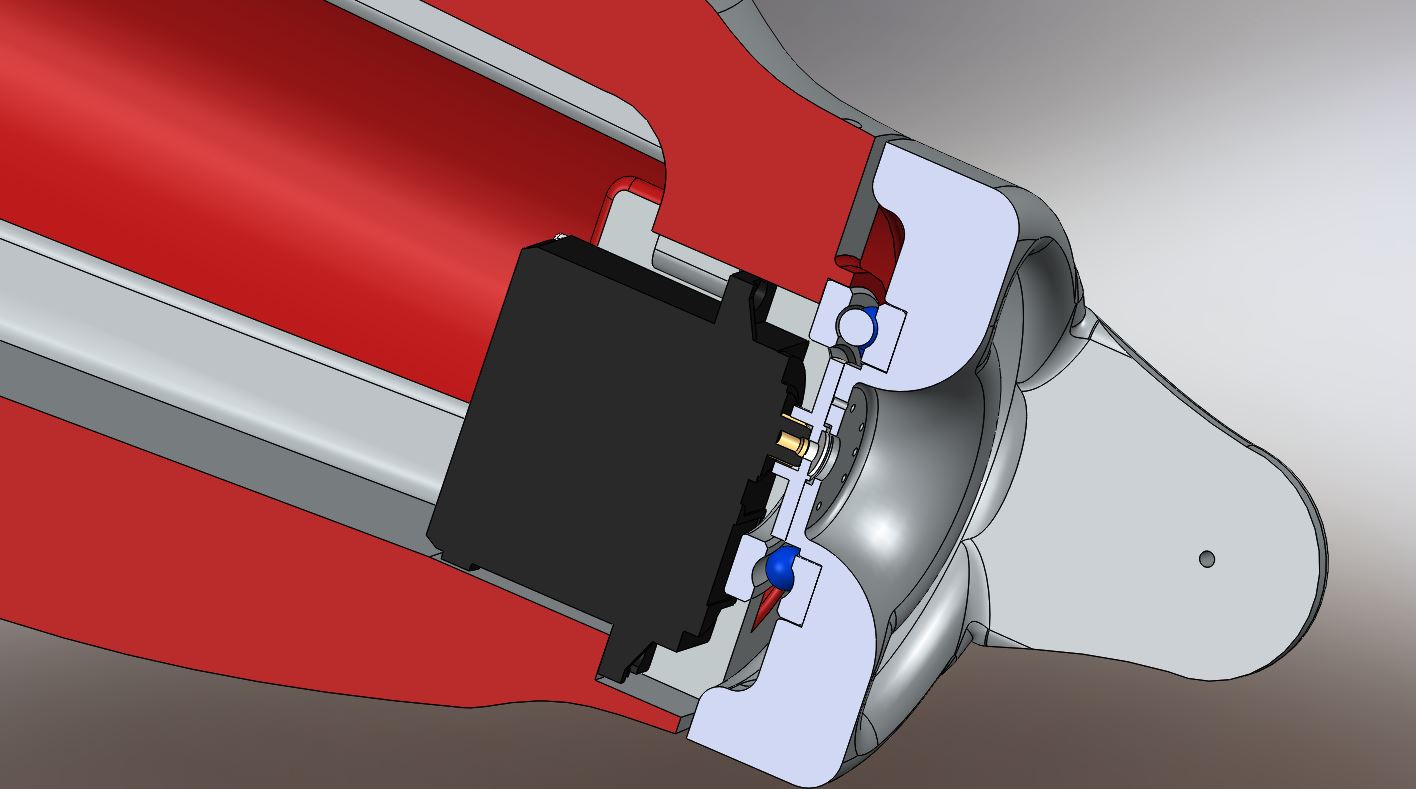
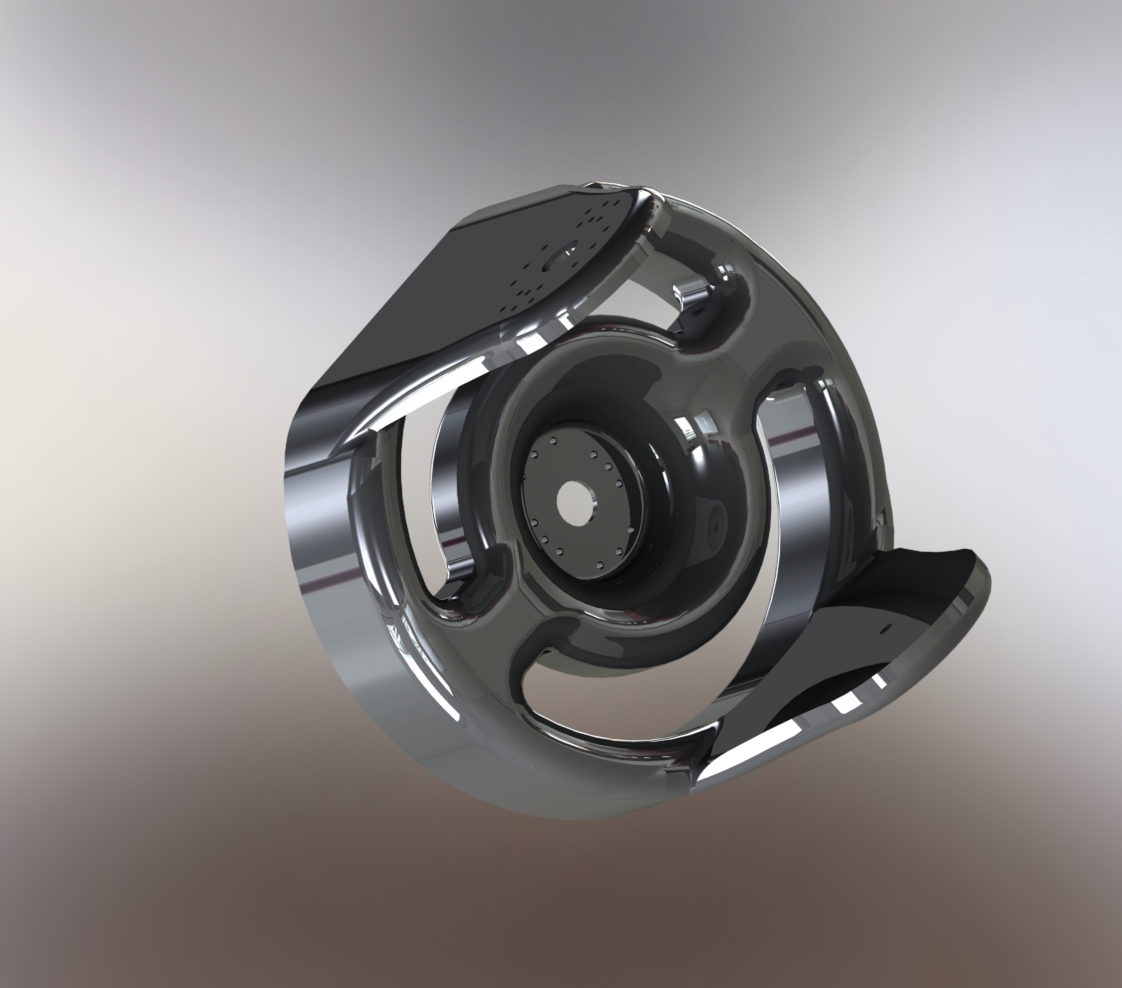
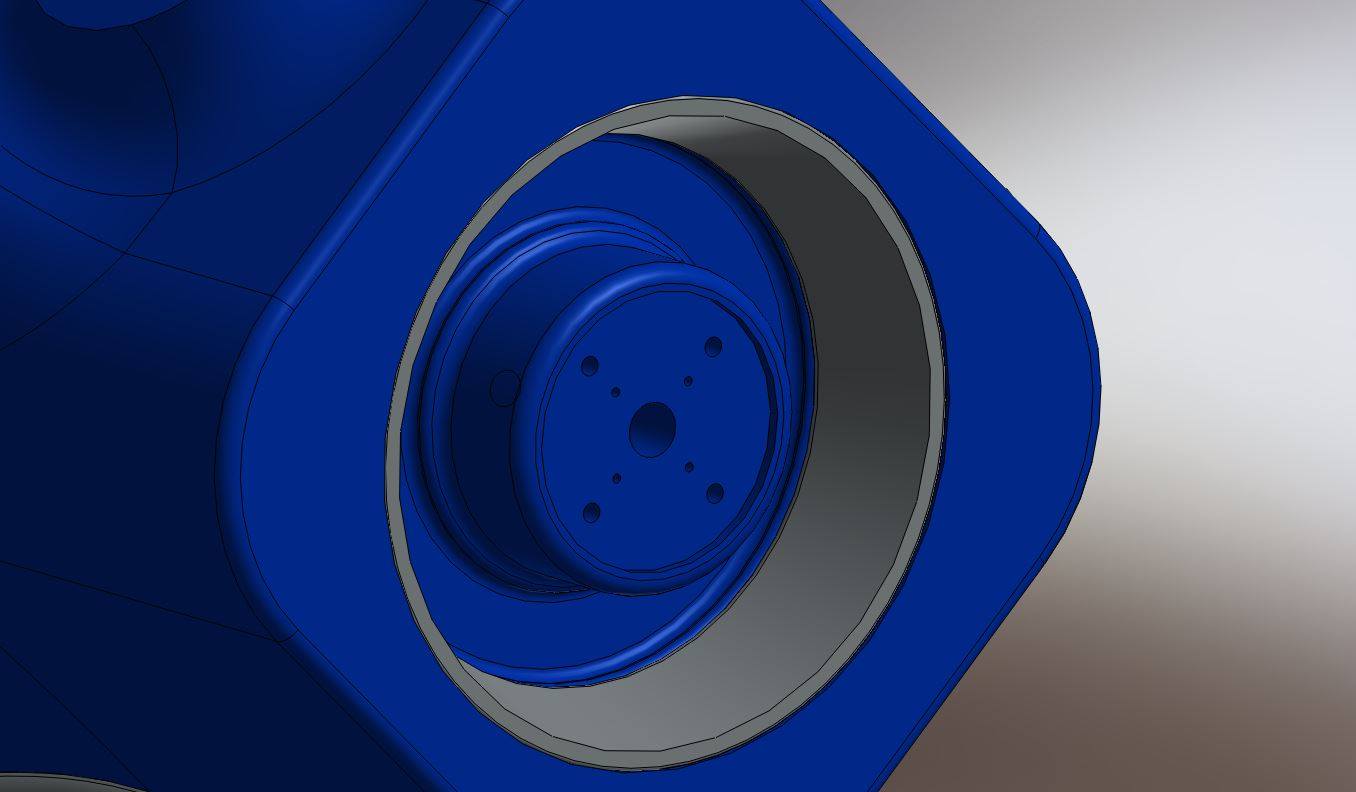
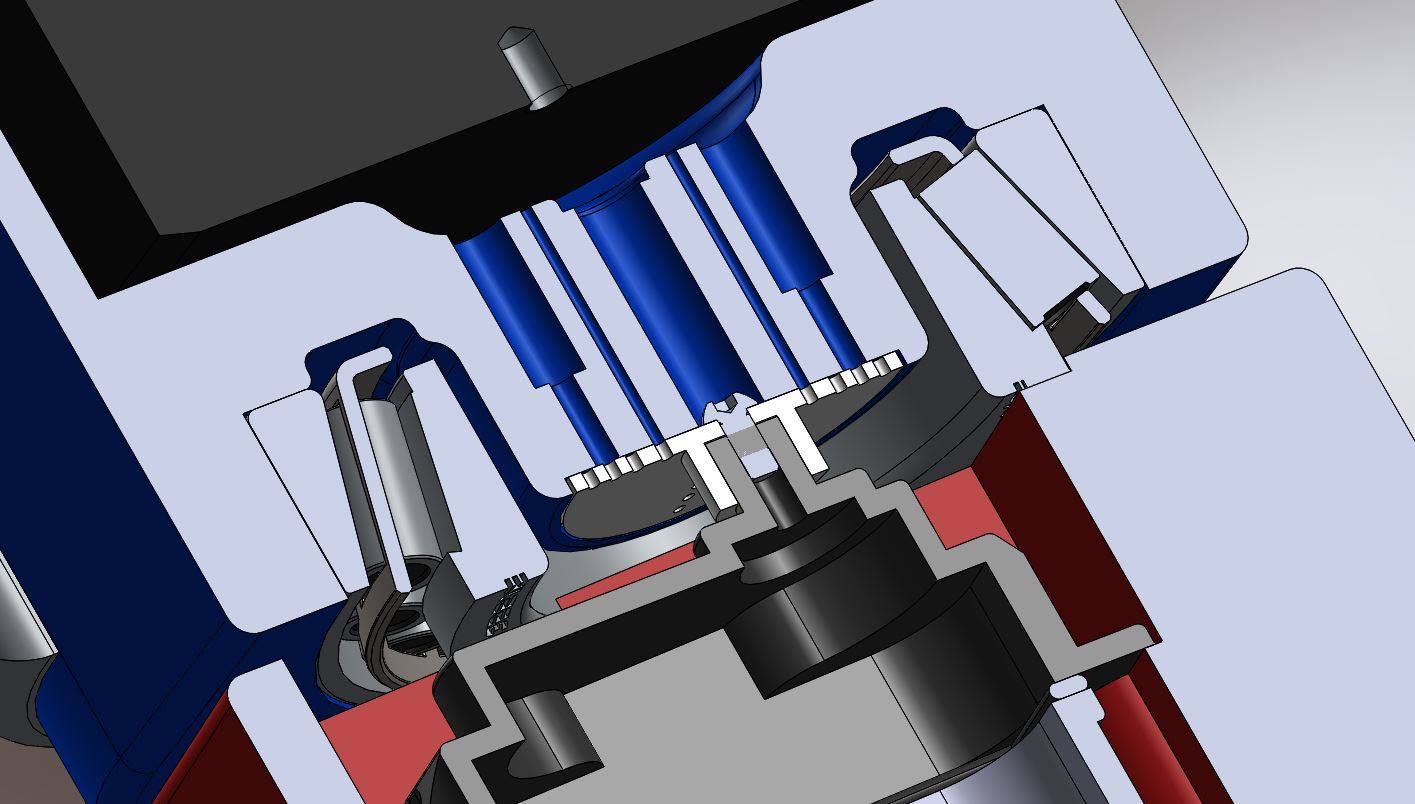
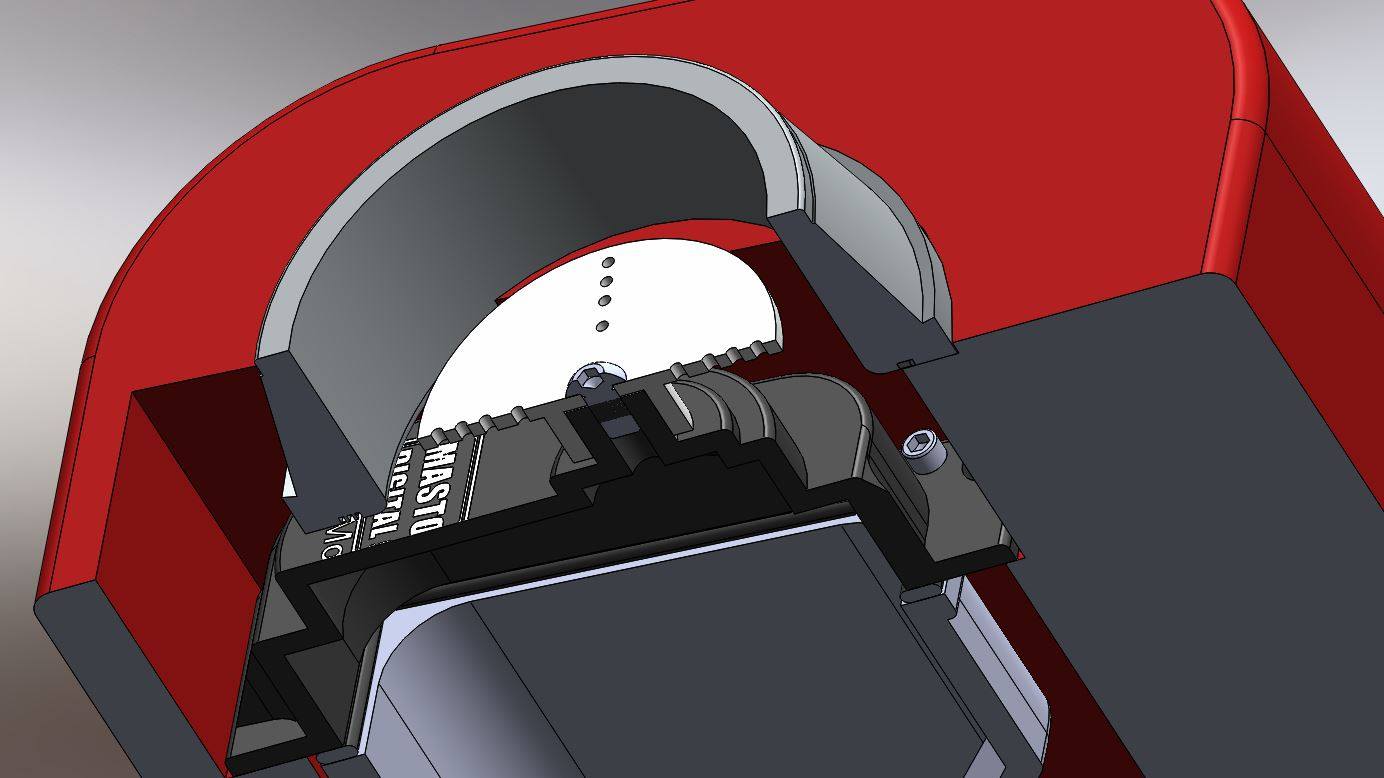
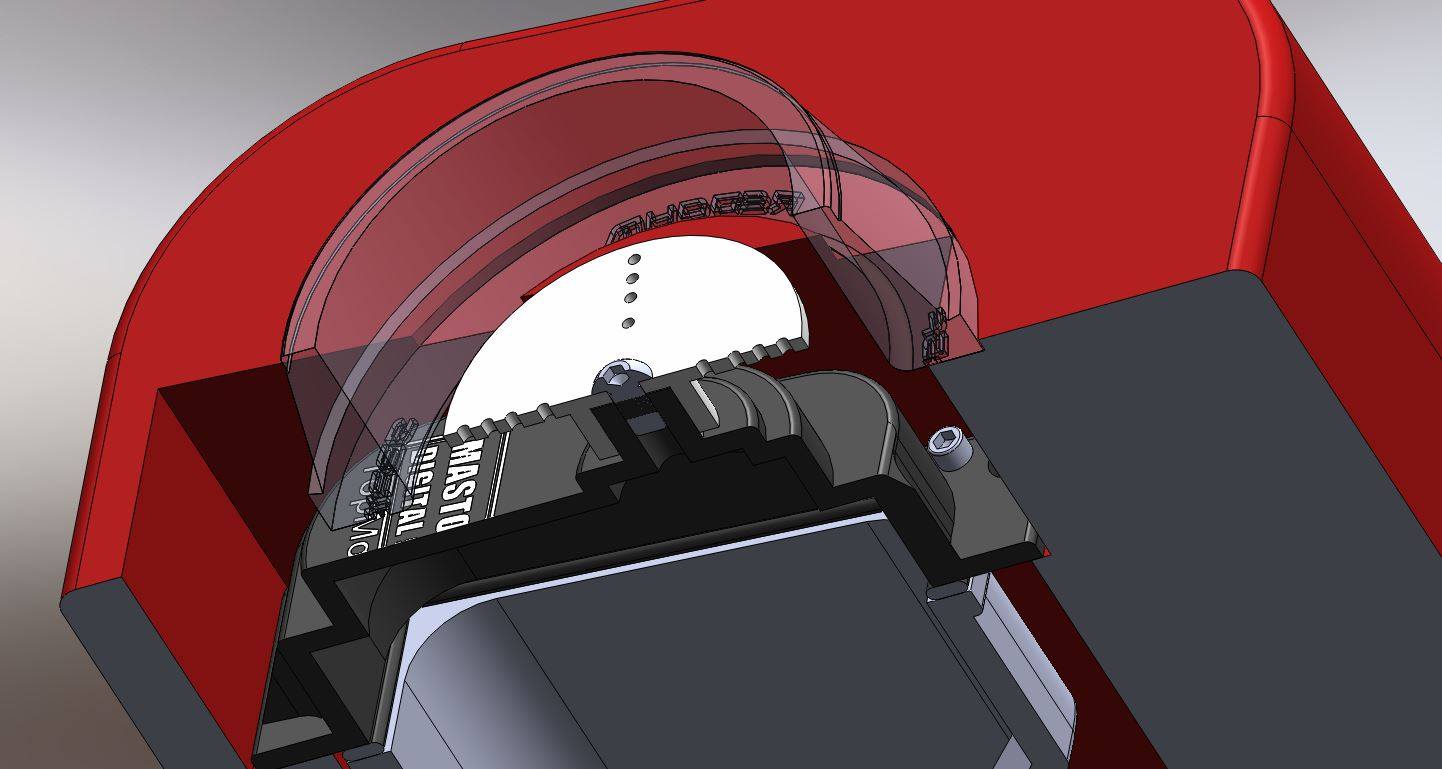
18/02/2017 L’étude de la partie mécanique du coude |
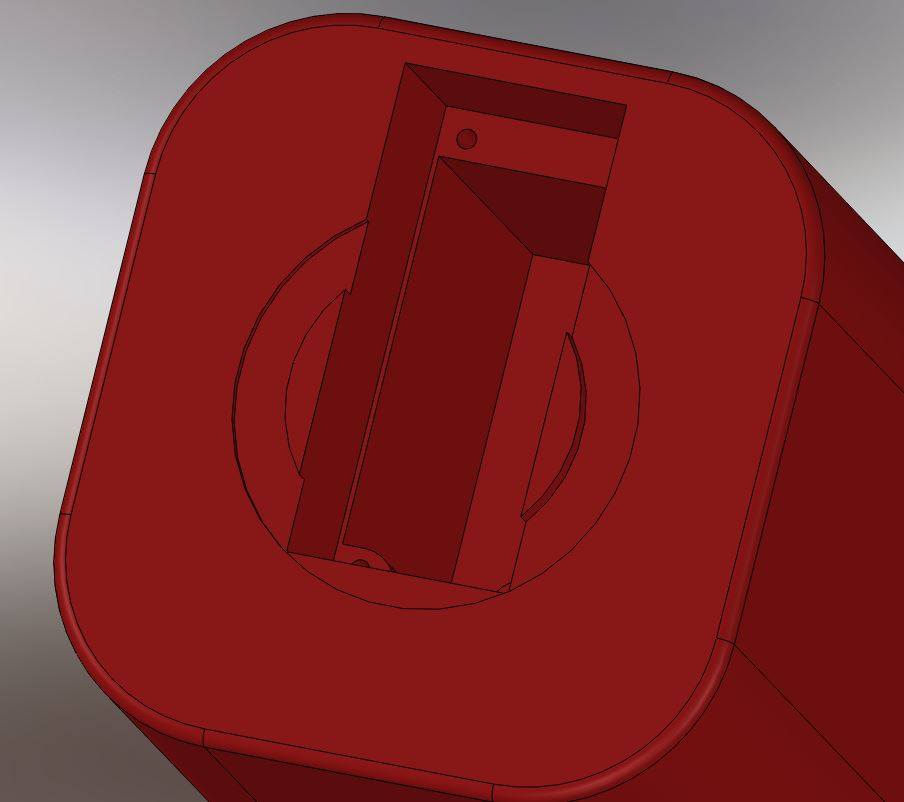
Voici des vues plus détaillées sur la partie mécanique qui compose le coude. Nous pouvons observer sur la figure 1, une pièce pour Le maintien axial de la rotation de l’avant-bras, cette pièce devra être réalisée avec un tour .Les contraintes mécaniques sont trop importantes pour réaliser cette pièce en impression 3D. Vous trouverez sur notre site les plans mécaniques pour pouvoir les réaliser. Ou vous avez la possibilité de commander cette pièce auprès d’un artisan, nous allons vous communiquer le lien. Nous avons déjà fait chiffrer cette pièce qui est de l’ordre de 8 euros. Vous remarquerez que la rotation du coude est supportée par un roulement de type SMF126 ZZ ( prix moyen 8.83€ ) , et enfin l’ensemble est bloqué par une flasque.
Vue du maintien axial de rotation de l’avant bras – RedOhm
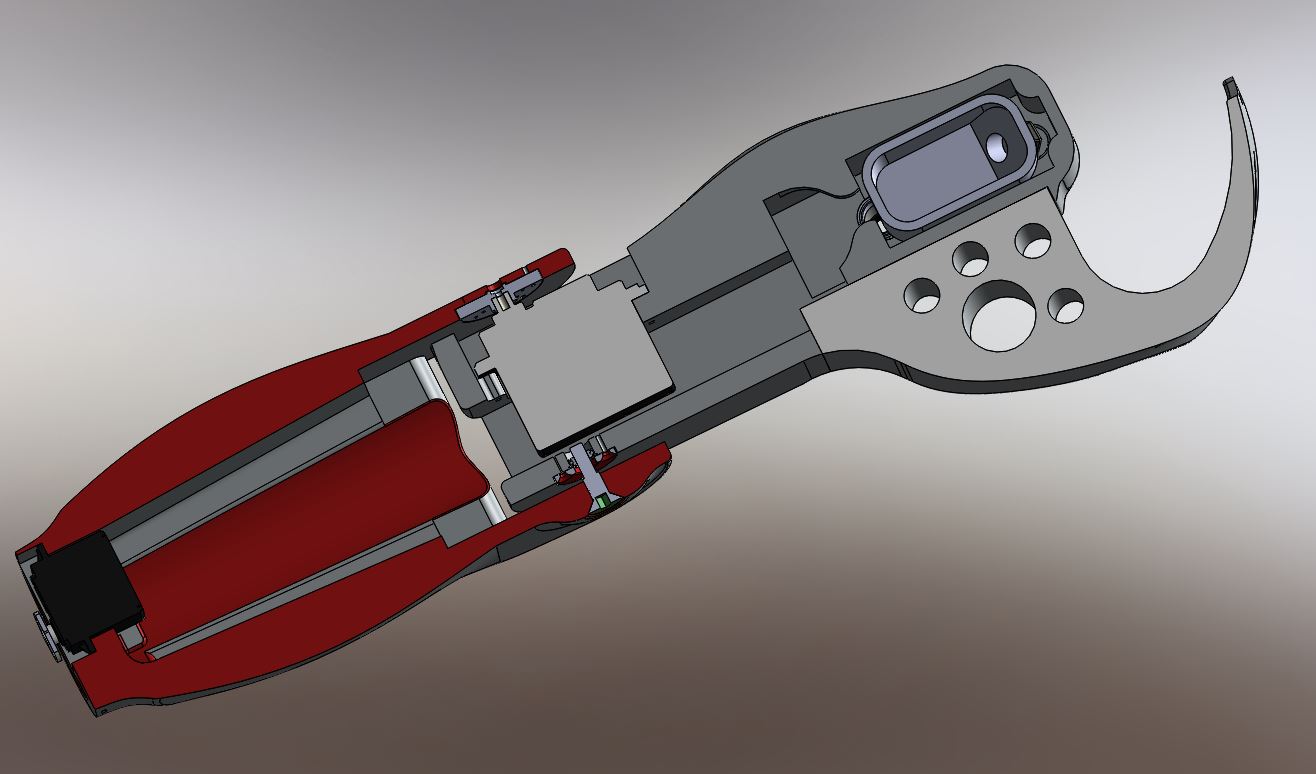
Robot Maya vue en coupe du bras , coude et de l’avant bras RedOhm
–
| Retour au sommaire |
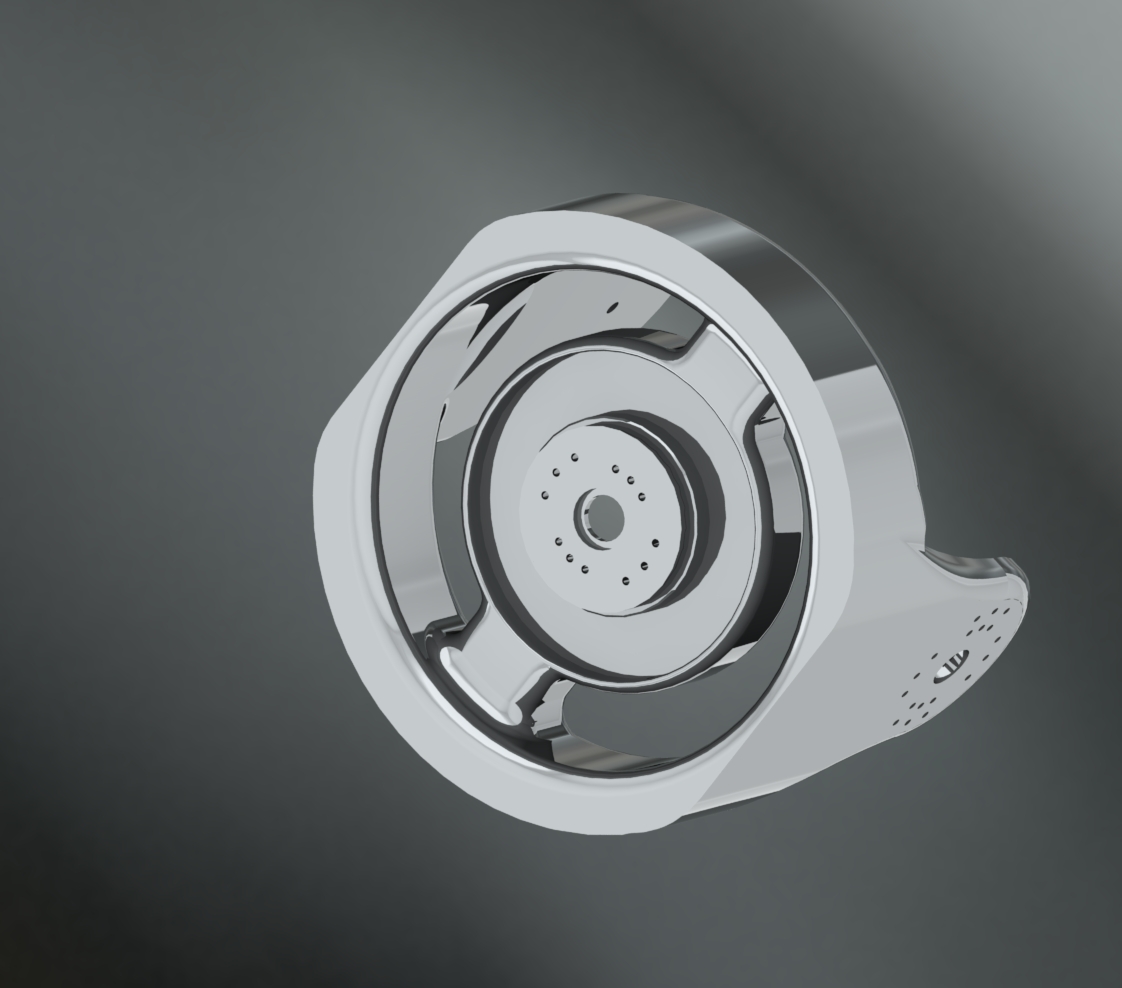
20/02/2017 Etat de l’avancement de la rotation du poignet
|



–
| Retour au sommaire |
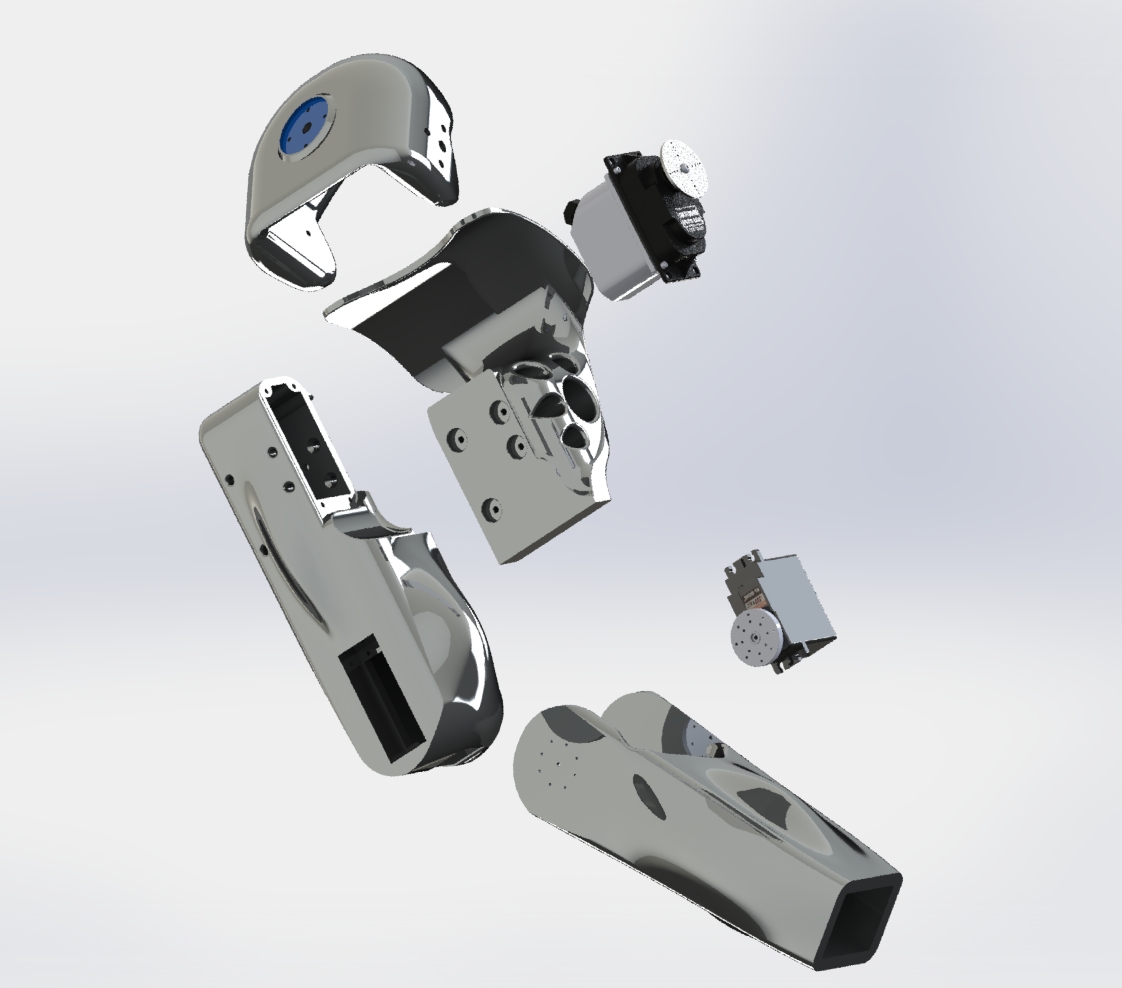
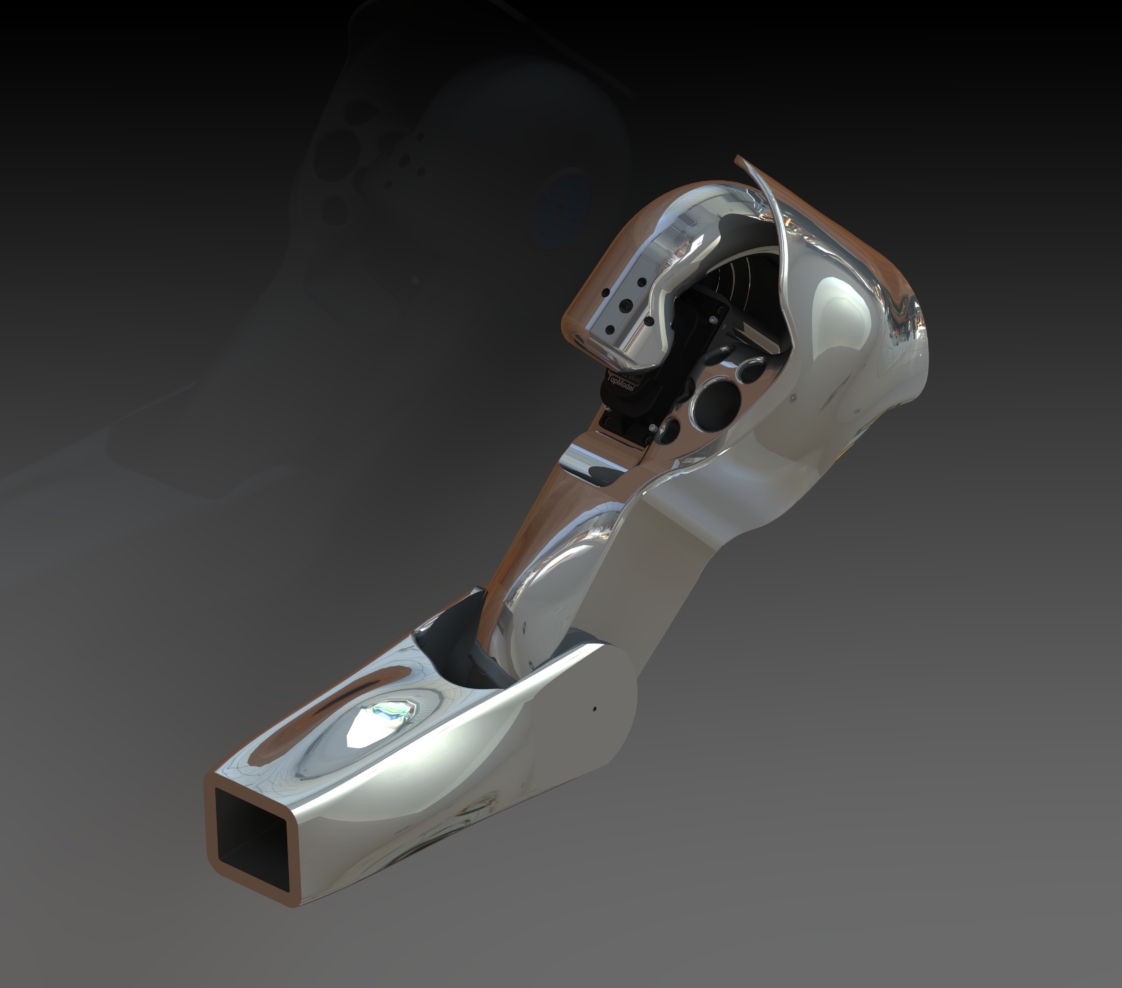
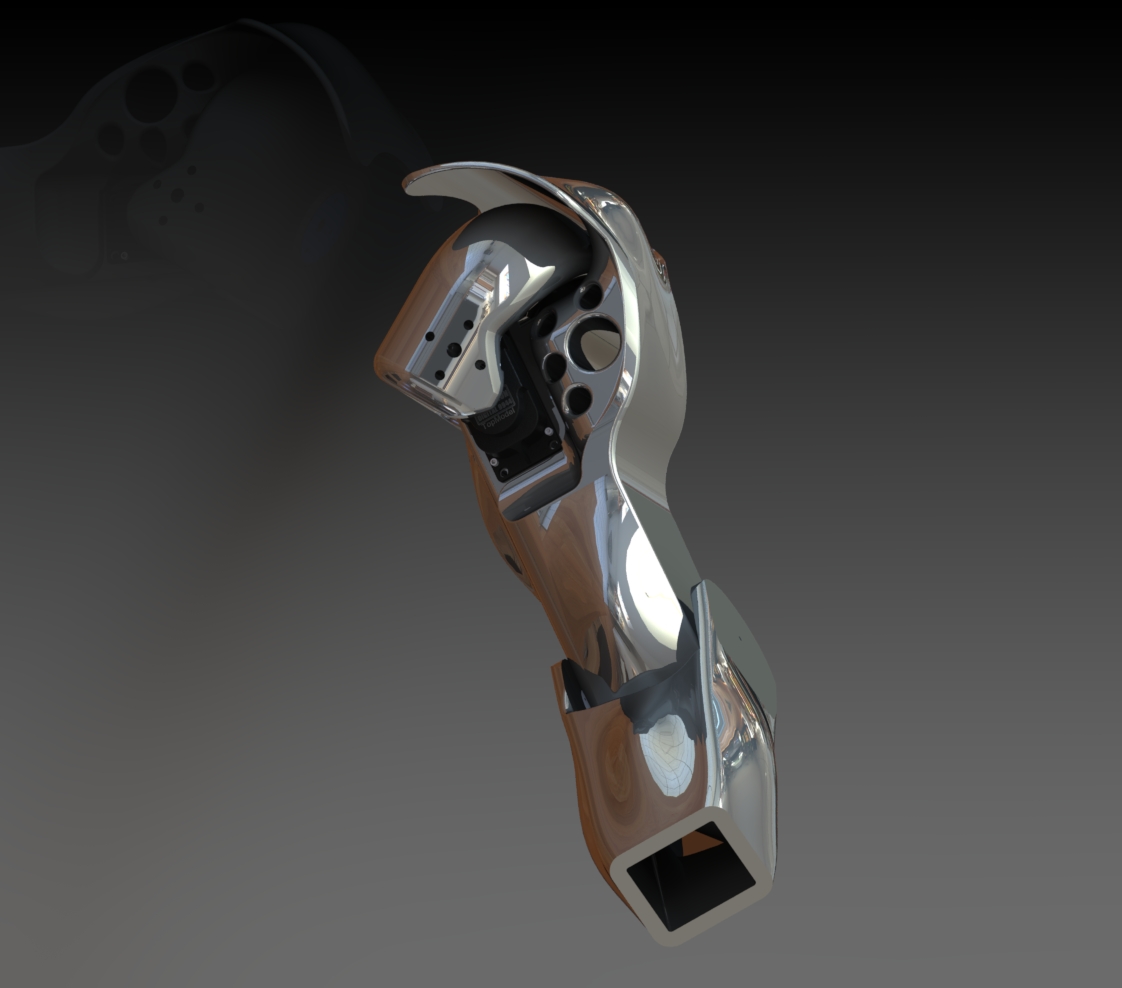
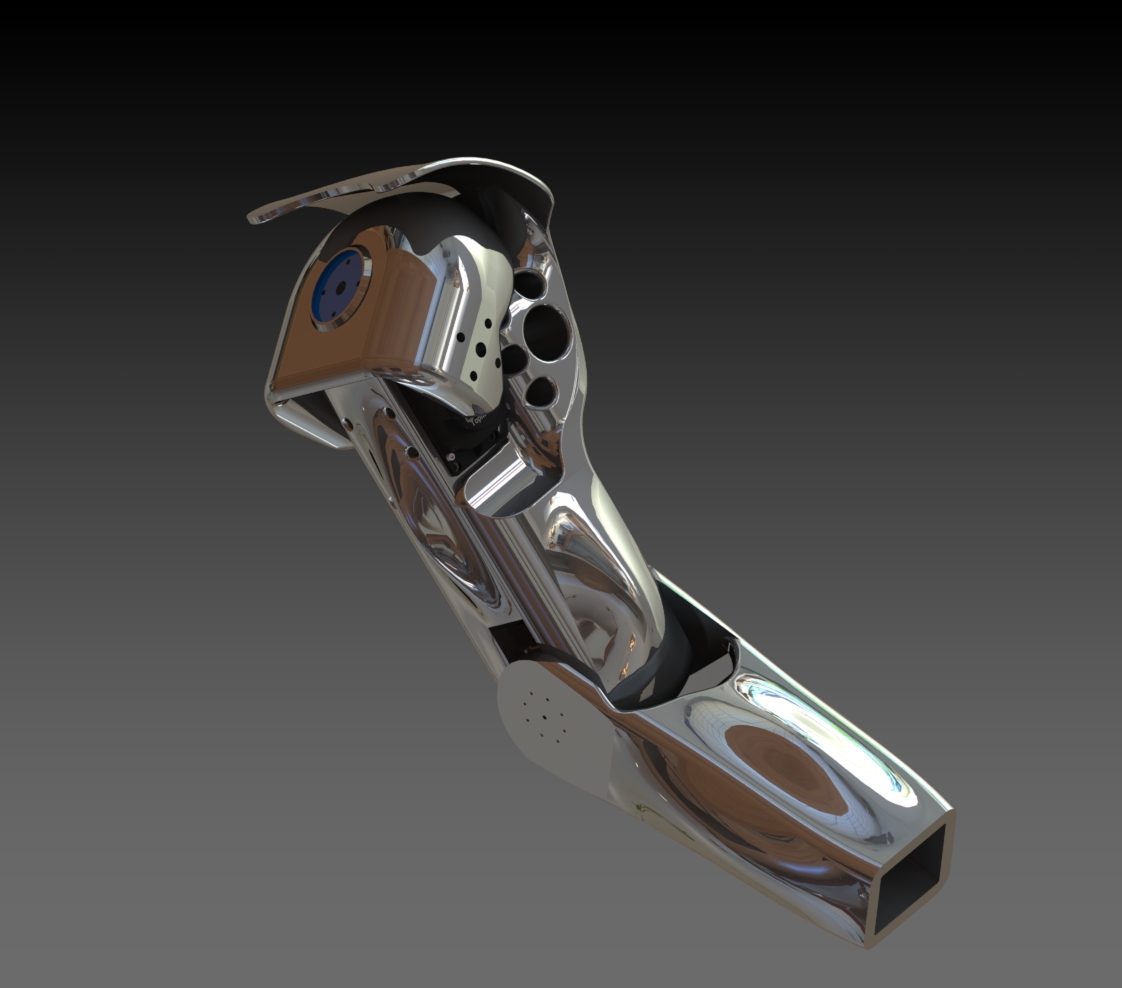
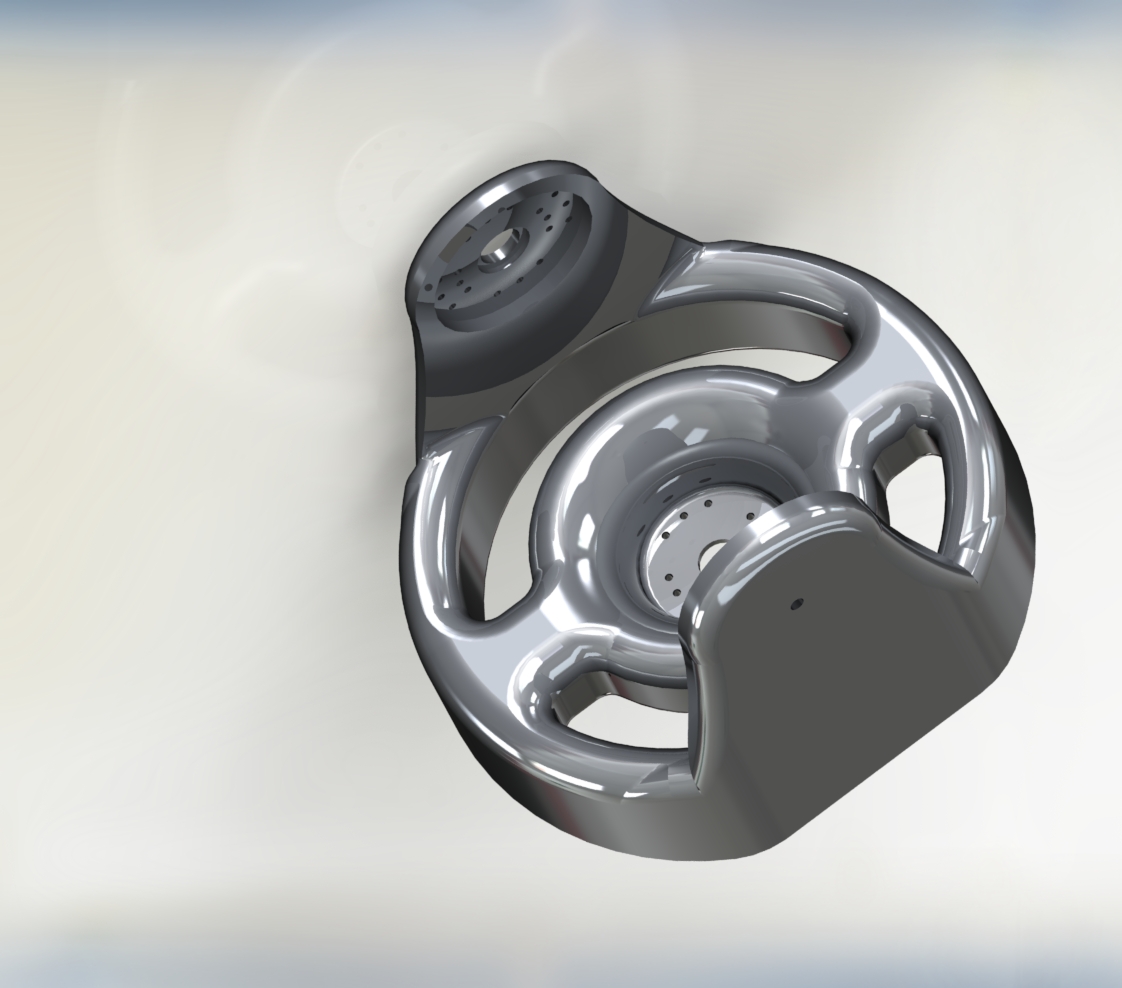
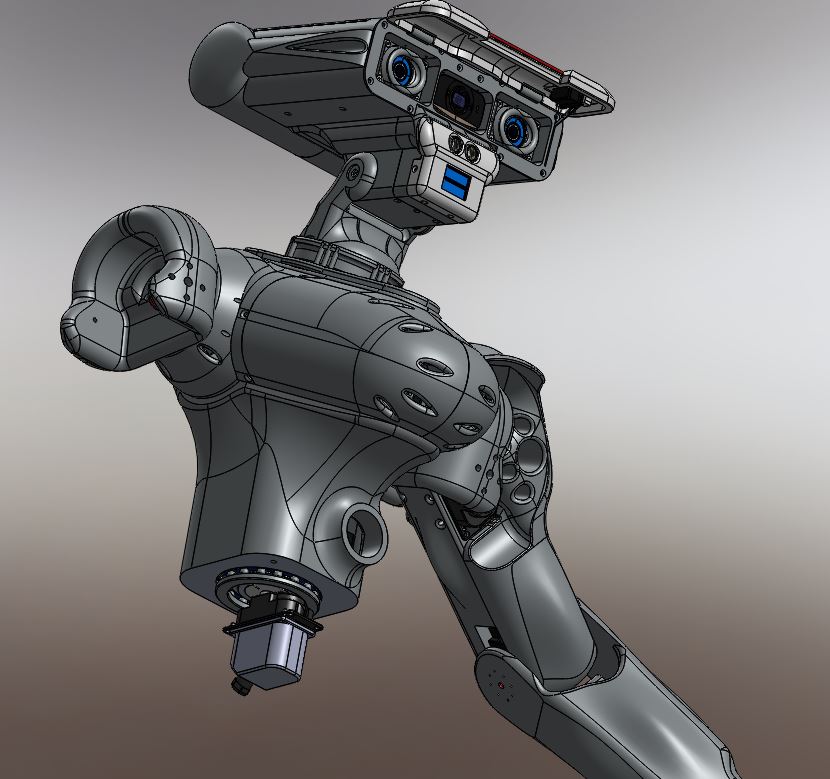
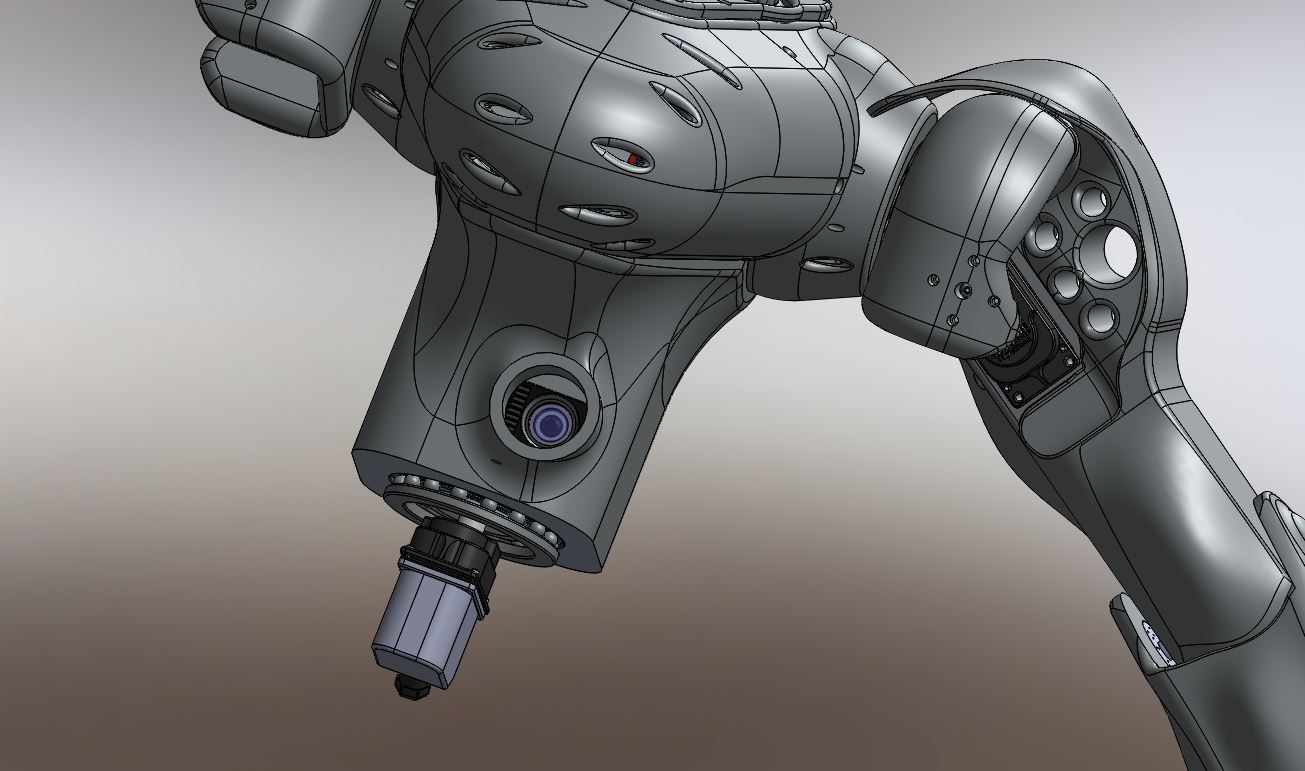
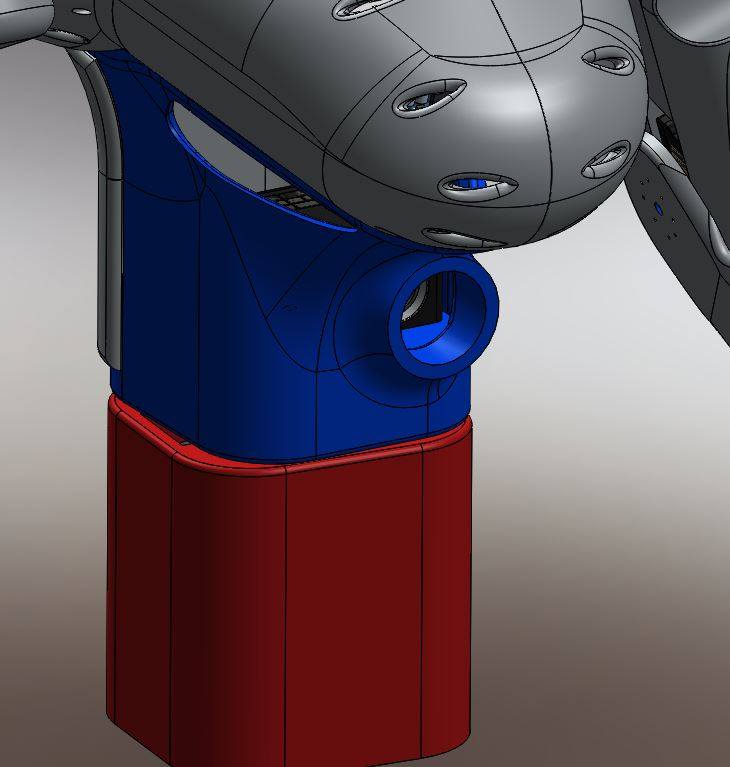
24/02/2017 Rotation du thorax et motorisation de celui-ci
|
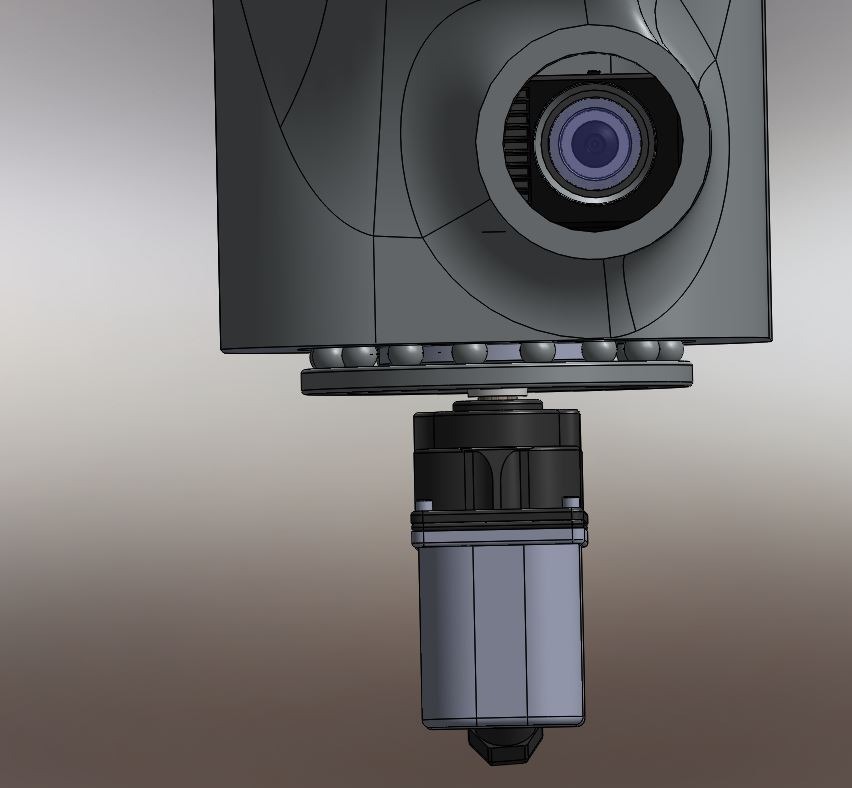
Nous voici maintenant arrivé à la rotation du buste, nous pouvons remarquer sur les photos que nous avons repris le système de buté à bille déjà utilisée pour la rotation du cou. Le servomoteur 99 44 qui effectue cette rotation a été choisi pour ses qualités mécaniques. Nous pouvons remarquer au-dessus du système de rotation que l’on peut apercevoir une sorte de petit œil, nous avons à faire là ,à un Pico projecteur qui occupe une partie de la cage thoracique, évidemment cet accessoire est purement optionnel (c’est certainement un petit coup de nostalgie de R2-D2) .
thorax de rotation Maya RedOhm – 001
thorax de rotation Maya RedOhm – 002
Maya rotation thorax visu sur le pico projecteur RedOhm – 003
Maya rotation thorax visu sur le pico projecteur RedOhm – 004
Information sur le fonctionnement des servomoteurs : Servomoteur
–
| Retour au sommaire |
![]()
25/02/2017 Schéma de principe du circuit de contrôle
|
Maya schéma de principe du circuit de contrôle RedOhm
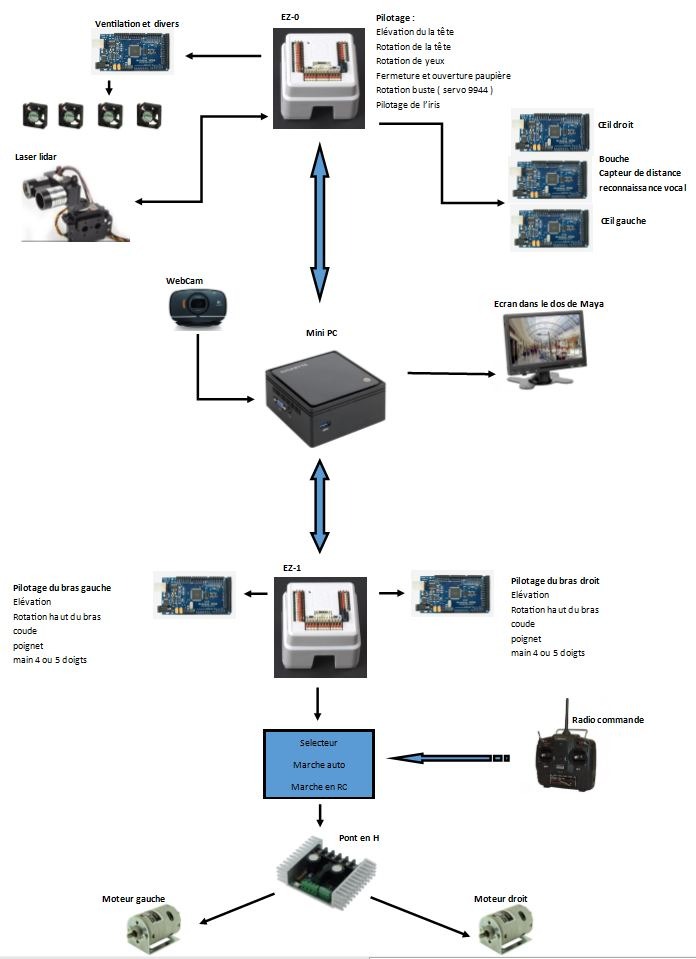
Voici d’une façon schématique comment va s’articuler le système de communication entre les diverses cartes utilisées. Un grand nombre de protocoles de communication sera utilisés dans ce système.
Exemple :
I2C : Communication entre les 3 cartes Arduino des yeux et de la bouche
SPI : Communication des afficheurs avec les carte Arduino 2560
WIFI ; Entre le mini pc et les cartes EZ-Robot
Filaire binaire : Entre les cartes EZ-Robot les cartes Arduino 2560
Rc : La radiocommande pour reprendre la main en cas anomalie
Vous remarquerez que sur ce dessin nous ne voyons pas apparaître tous les capteurs, vous aurez d’autres schémas correspondants à différents systèmes de détection que Maya utilisera. Nous développons actuellement un autre système pour remplacer le mini PC ceci afin de baisser le coût de construction , pour le moment nous avons jeté notre dévolu sur la carte LattePanda.
La carte de développement LattePanda est un ordinateur monocarte compatible Arduino. Elle fonctionne sous Windows 10 Home Edition 32 bits (avec la licence incluse) installé sur une mémoire flash de 32 GB intégrée. Le LattePanda fonctionne sur une base d’Intel ATOM X5-Z8300 comportant 2 GB de mémoire RAM.
Le LattePanda peut se connecter à un moniteur (via port HDMI ou MIPI-DSI) et propose une connectivité complète: WiFi, Bluetooth 4.0, 2 ports USB 2.0, port USB 3.0, port microSD (carte microSD non livrée), port audio Jack 3.5, connecteur RJ45 et 6 connecteurs pour capteurs compatibles Gravity. Le LattePanda peut effectuer les tâches simples d’un PC de bureau (feuilles de calcul, traitement de texte, décodage flux vidéos 1080p, internet, jeux peu gourmands en ressources…).
Nous avons déjà installé le logiciel EZ-Robot , et tester cette application sur la carte LattePanda pour le moment les résultats sont plutôt encourageants.
Notre fournisseur : Gotronic
Prix moyen de la carte : 155 €
–
| Retour au sommaire |
![]()
18/03/2017 Impression du haut du bras
|
Voici quelques photos du haut du bras de Maya. L’impression a duré 66 heures, pour 731 g de produit de chez ArianePlas . On peut déjà apercevoir un des deux servomoteurs montés dans la partie haute du bras.

Maya le 18-03-2017 par RedOhm




–
| Retour au sommaire |
![]()
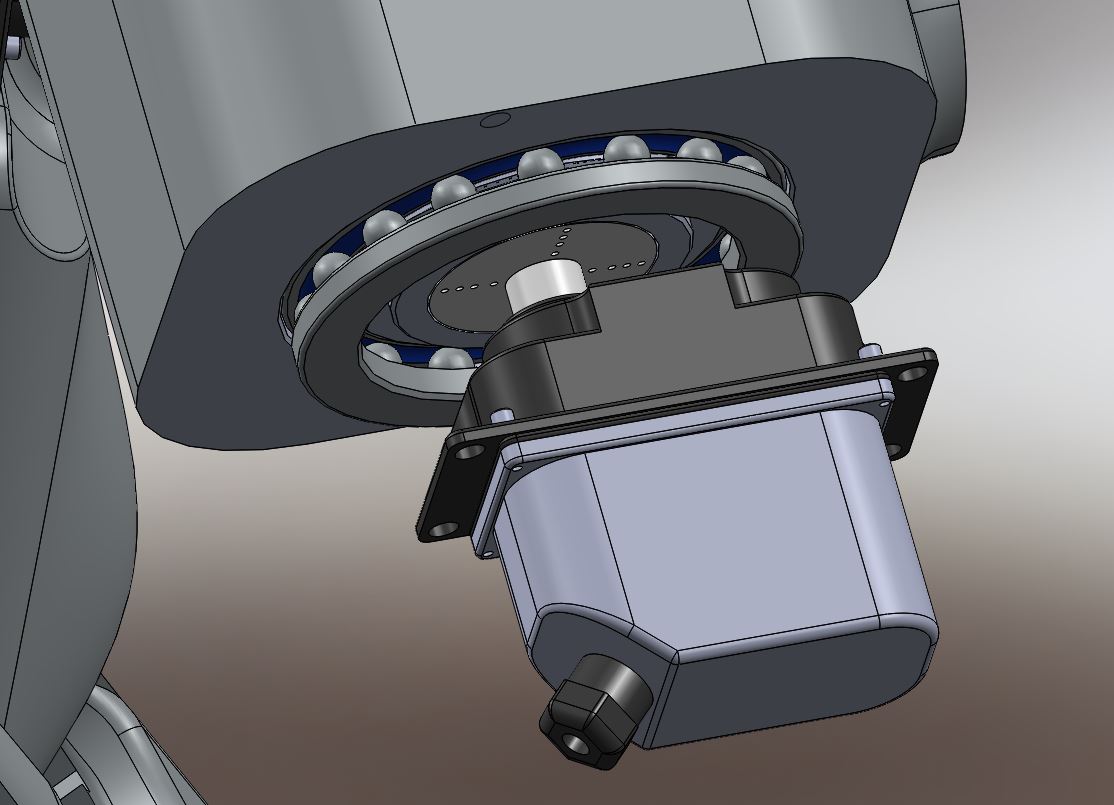
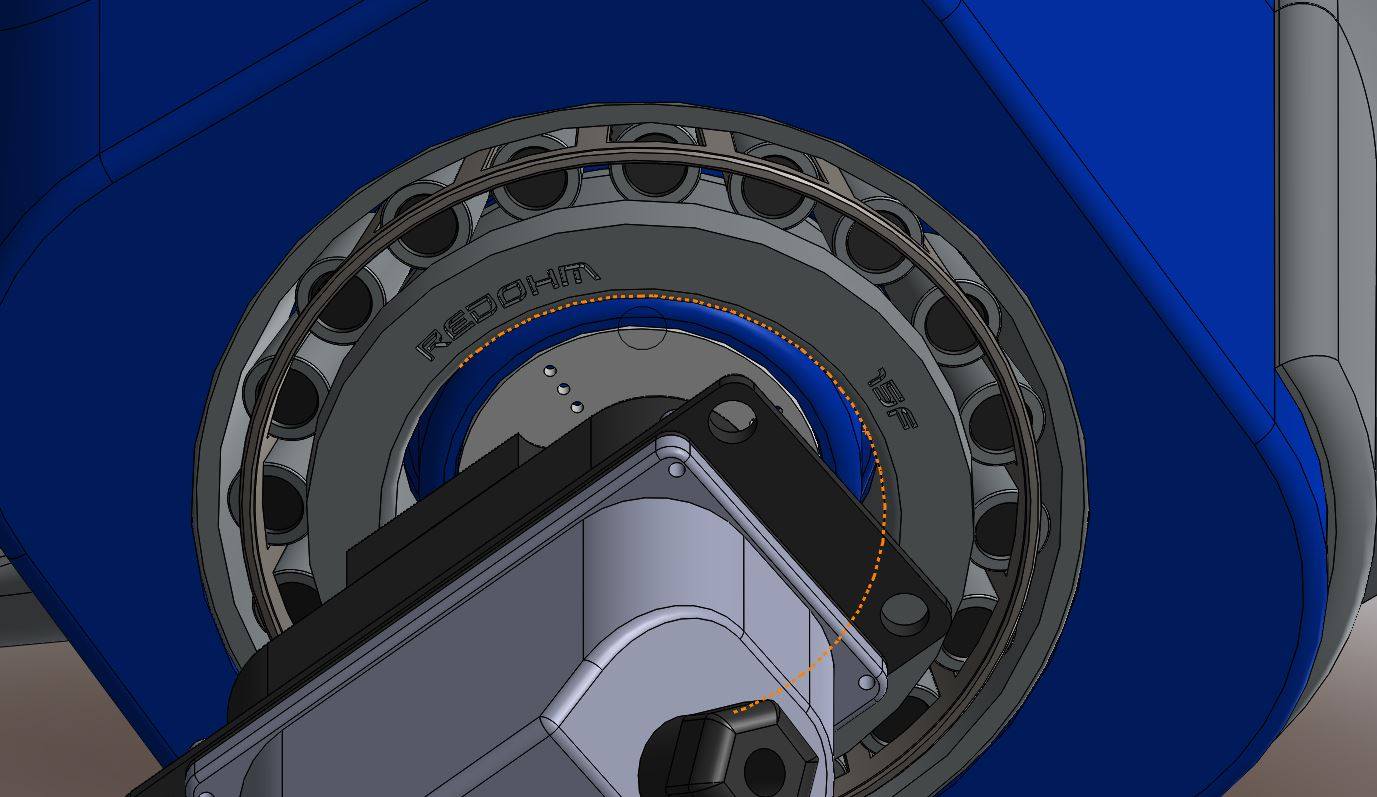
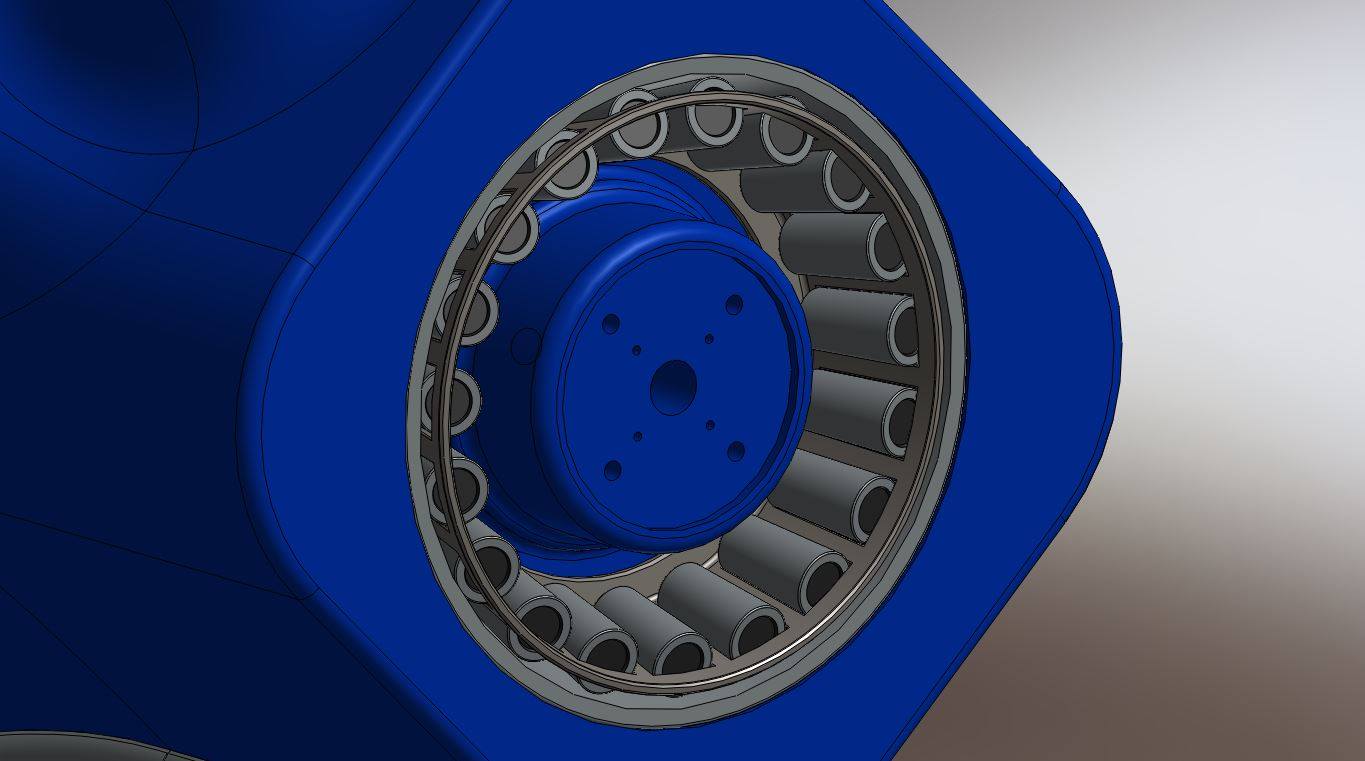
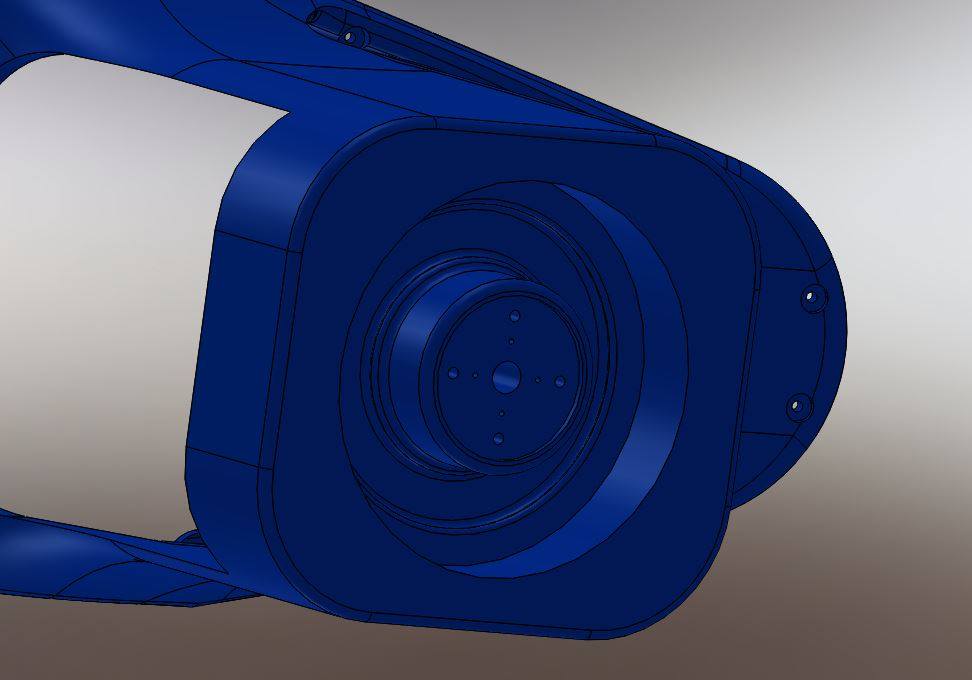
19/03/2017 Modification de la rotation du buste
|
Voici quelques photos qui vous donnent l’état des modifications pour la rotation du buste. Lors de la première étude, nous avions travaillé sur la rotation du buste par l’intermédiaire d’une buté à billes. Après présentation de l’étude à nos lecteurs, nous avons eu une remarque judicieuse (merci à notre lecteur) sur les efforts radial et axial de la rotation du buste (surtout avec le balancement des bras). Après quelques vérifications, nous avons donc inséré dans le buste un roulement à rouleaux coniques, ceci afin d’avoir une meilleure stabilité de l’ensemble et d’absorber les différents efforts.
–
| Retour au sommaire |
08/04/2017 Essai du bras de Maya.
|
–
Nous allons déjà faire le point sur les actionneurs nécessaires à la construction du bras.
Nous avons pour la rotation et l’élévation du haut du bras .2 servomoteurs Mastodon 9944 de chez Topmodel (Couple: 99 kg.cm).
Pour la partie du coude, nous utilisons un servomoteur Hitec HS805BB. Ce servomoteur à roulement à billes se caractérise par un couple très élevé (Couple: 24 kg.cm).
Pour la partie rotation du poignet, nous avons un servomoteur Hitec HS645MG .Ce servomoteur à double roulements à billes se caractérise par un excellent centrage et un couple très élevé pour sa taille (Couple: 9,6 kg.cm).
Nous avons choisi pour piloter cet ensemble un module Ez robot. Le module EZ-Robot contient les composants nécessaires pour réaliser rapidement cette manipulation pilotée par PC via une liaison sans fil Wifi .L’utilisation du logiciel EZ-Builder sur votre ordinateur vous permet de contrôler les sorties de la carte de commande EZ-B V4.
Passons à la tension d’alimentation, pour faire ces essais , nous aurons besoin de 7.4V pour la partie puissance des servomoteurs Mastodon 9944. Une tension de 6 V pour le servomoteur du coude et de la rotation du poignet. Pour l’alimentation du module de contrôle , nous aurons besoin d’une tension de 12 V.
Vous remarquerez que nous avons choisi d’utiliser les tensions maximales sur les servomoteurs pourquoi ? Simplement pour avoir le couple maximum donné par le constructeur.
Informations utiles sur les servomoteurs sur -> Les servomoteurs
–
| Retour au sommaire |
![]()
22/04/2017
|
–
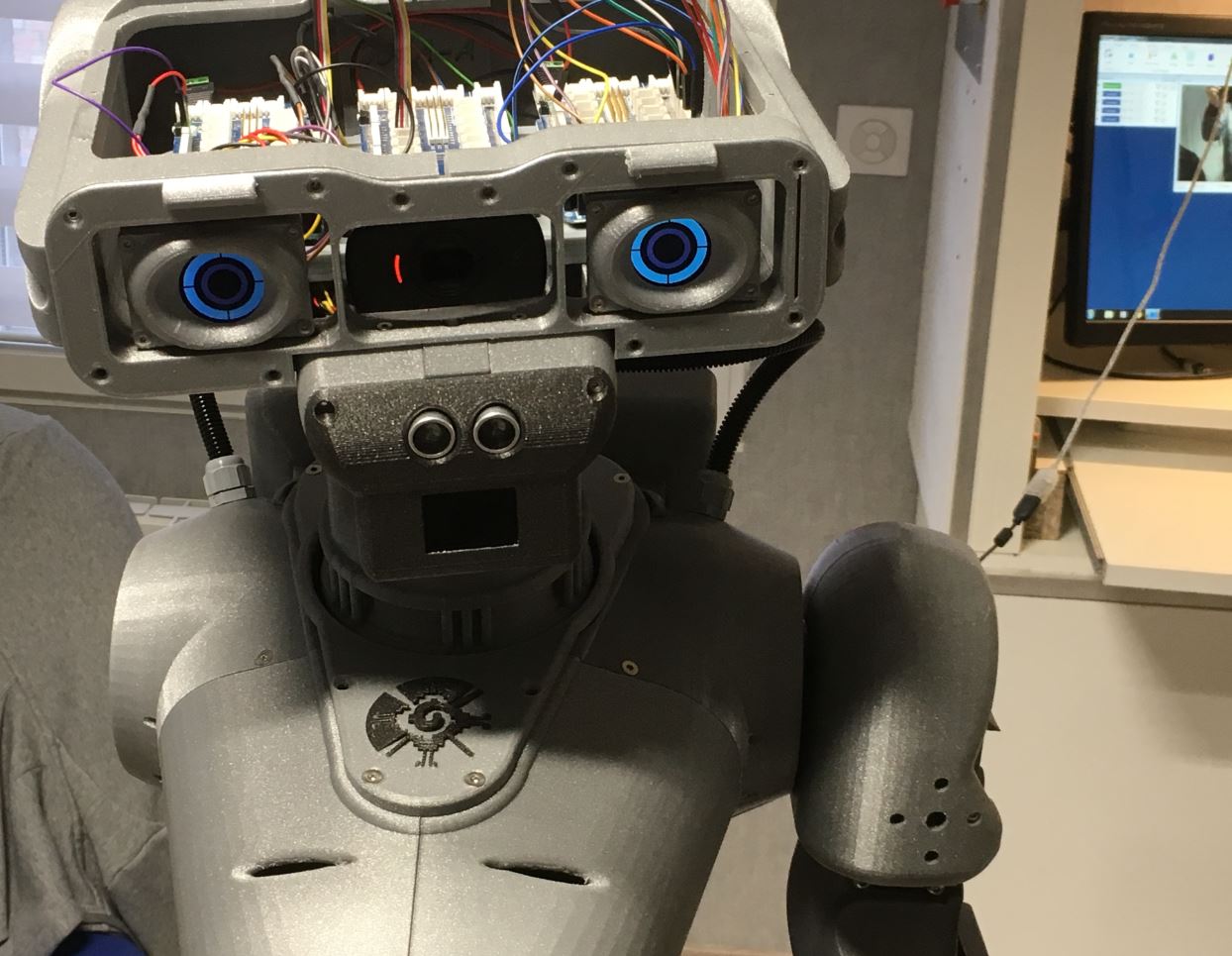
Voici une présentation du fonctionnement manuel des différents mouvements de la tête. Nous avons déjà la rotation des yeux comme un être humain, nous bougeons d’abord nos yeux avant de bouger la tête, et enfin seulement quand nos yeux sont en buté ou je dirais plutôt au maximum de leurs déplacements, la tête tourne pour continuer à observer. Il en sera de même pour notre robot. De même, vous pourrez voir dans cette vidéo le système d’élévation de la tête. L’ensemble du déplacement des yeux, de la rotation de la tête et de l’élévation de la tête et piloté par la caméra qui se trouve au centre de la boîte crânienne de Maya. Évidemment, cette caméra passe par un ordinateur qui après traitement, renvoie ces informations de déplacement sur les servomoteurs qui pilotent ses ensembles. Vous pourrez remarquer aussi que les yeux de Maya sont opérationnels, ils sont surtout là pour vous donner l’état d’esprit de notre robot (et voilà, je considère qu’il est vivant cela ne vous rappelle rien) sur la vidéo, le robot possède des yeux qui reflètent qu’il est attentif, vous pourrez observer plus tard qu’il possède une multitude de formes d’œil, qui démarre de la colère, attentif, penaud, choqué etc.
| Retour au sommaire |
![]()
29/04/2017
|
Nous avons intégré dans la boîte crânienne de Maya une enceinte Bluetooth qui permettra de restituer la parole de notre robot, mais bien évidemment, vous aurez aussi la possibilité de mettre des haut-parleurs filaires. Comme nous l’avions annoncé dès le départ, notre robot est sous le signe de la culture Maya , donc nous avons réalisé la grille du haut-parleur avec une reproduction stylisée du calendrier maya. Vous remarquerez aussi que nous avons dû percer avec un trépan la boîte crânienne de notre robot là encore, de nouveaux fichiers seront disponibles, pour éviter cette manipulation. En revanche, ceux qui ont déjà sorti la boîte crânienne, la grille du haut-parleur s’adapte parfaitement. Le trépan utilisé pour percer la boîte crânienne de Maya est de diamètre 54. C’est un trépan que l’on trouve facilement dans n’importe quel magasin de bricolage.
Calendrier Maya

Nous avons réalisé la grille du haut-parleur avec une reproduction stylisée du calendrier maya – RedOhm

Le trépan utilisé pour percer la boîte crânienne de Maya est de diamètre 54. – RedOhm

L’ensemble sur Maya -RedOhm
| Retour au sommaire |
![]()
06/05/2017
|
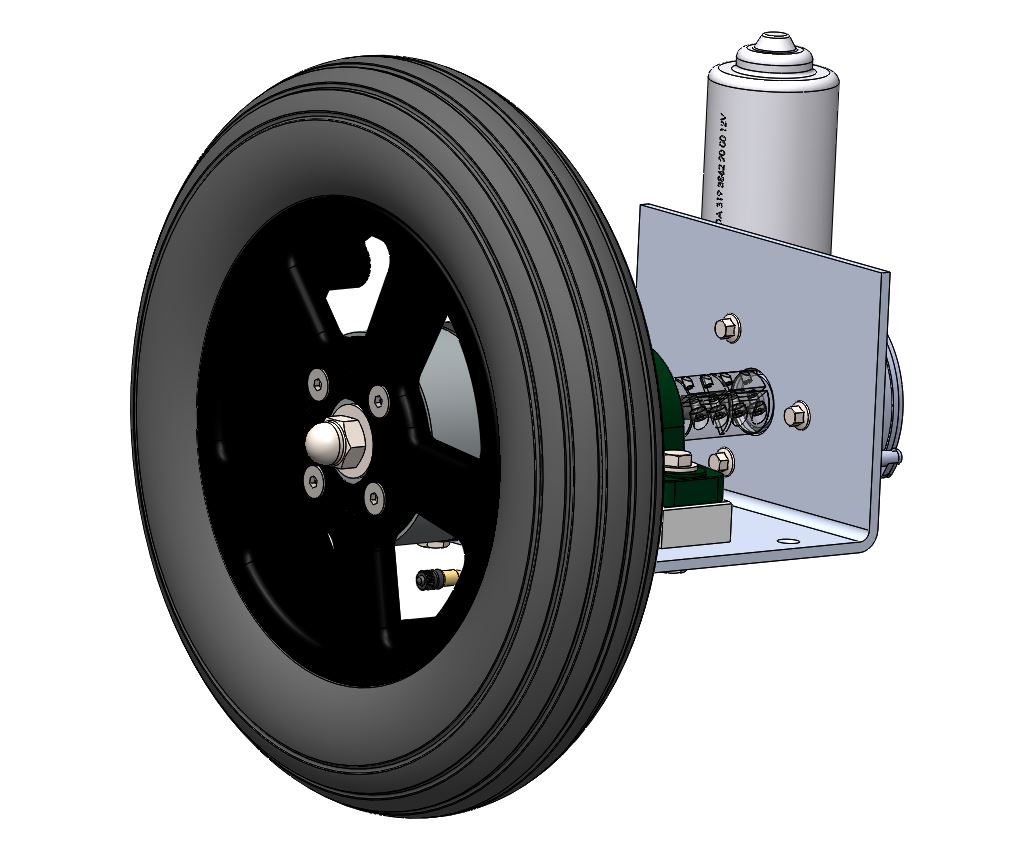
Pour le déplacement de Maya nous avons réfléchi sur trois types de châssis différents, nous allons commencer par le châssis qui est prévu plutôt pour rouler en plein air. L’ensemble est relativement facile à construire « Eh oui il va falloir faire un peu de mécanique », le montage est composé d’un moto réducteurs compact Doga 319 *12V/95rpm (mais rien ne vous empêche de récupérer 2 moteurs d’essuie-glace de même type), de 2 paliers à semelle avec graisseur UCP 202, une tôle en aluminium de 6 mm d’épaisseur, et enfin de construire l’axe principal est l’élargissement de roue qui sera adaptée au type de roue que vous pourrez récupérer. Vous aurez toutes les informations techniques, les dessins, les branchements électriques avec le variateur sur notre site.
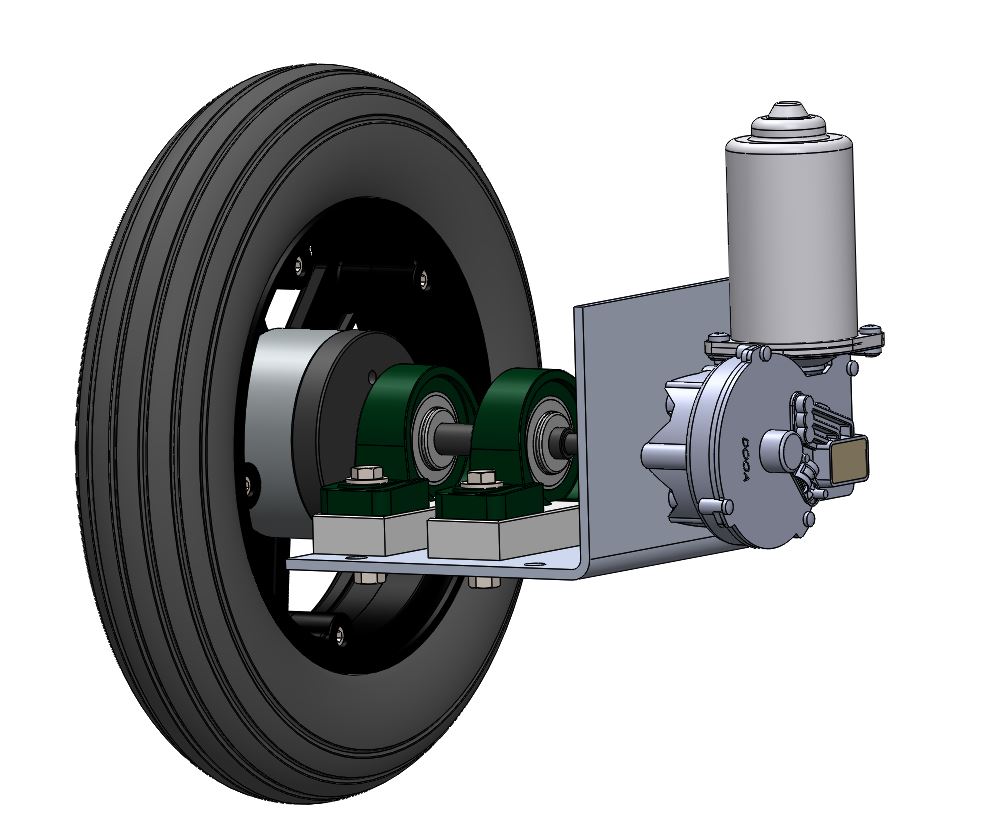
Maya groupe moto-propulseur vue sur le moto-réducteur RedOhm
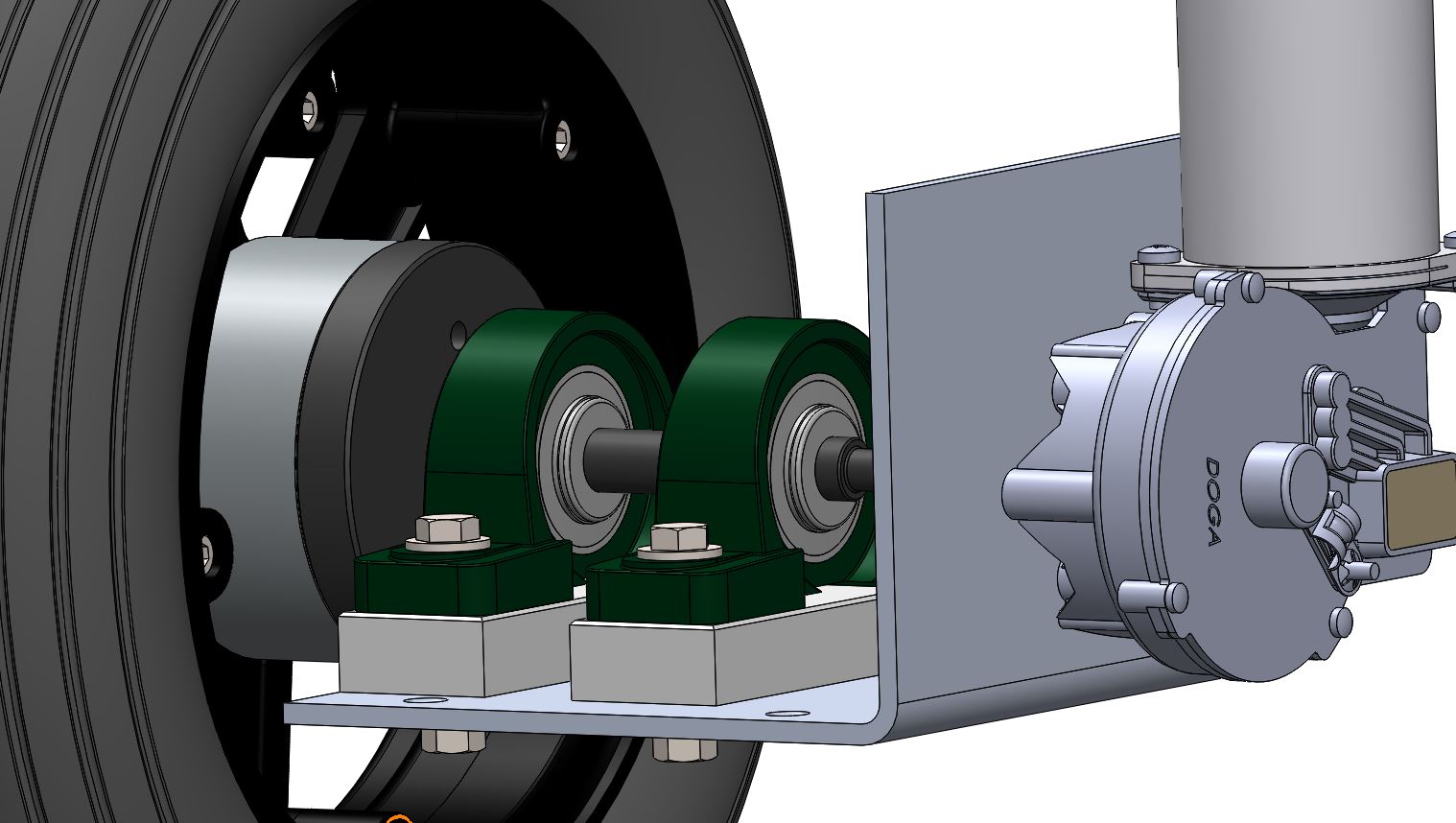
Maya groupe moto-propulseur vue sur le moto-réducteur RedOhm – 001
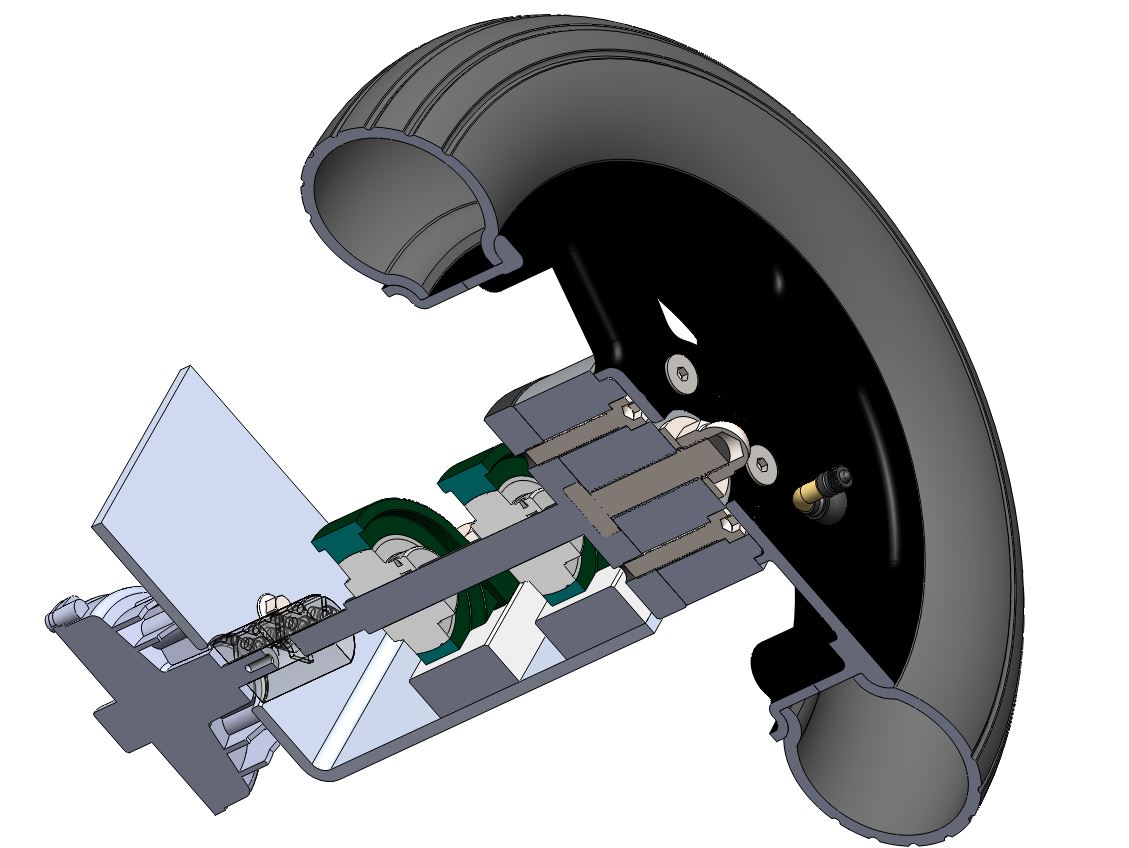
Maya groupe moto-propulseur vue sur le moto-réducteur RedOhm – 002
Maya groupe moto-propulseur vue sur le moto-réducteur RedOhm – 003
Information technique :
Groupe moto-réducteur : Doga 319 la page ou le site Mdp
Palier à semelle avec graisseur UCP 202 : 1001roulements la page ou 1001roulements le site
| Retour au sommaire |
![]()
11/06/2017
|
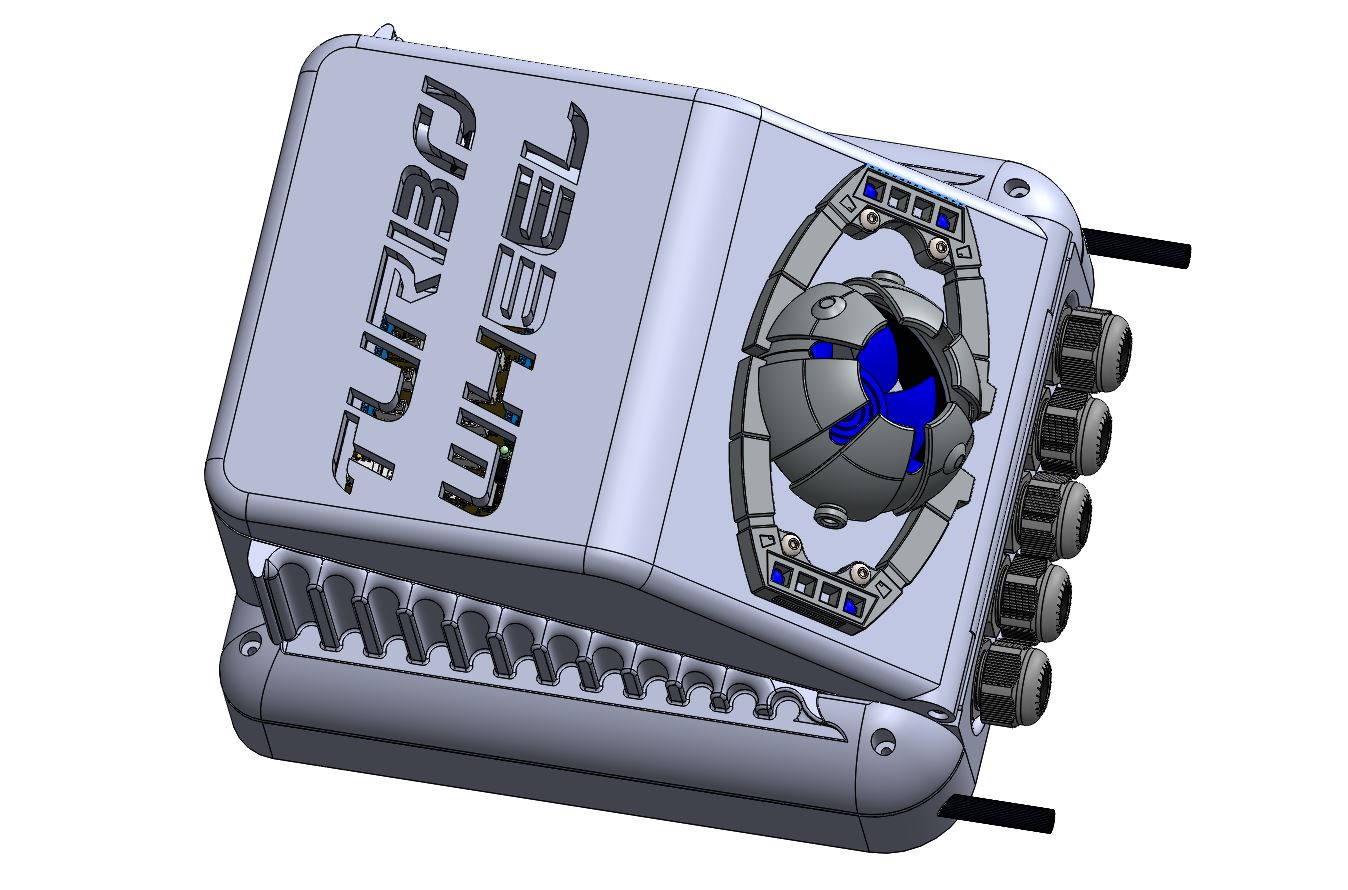
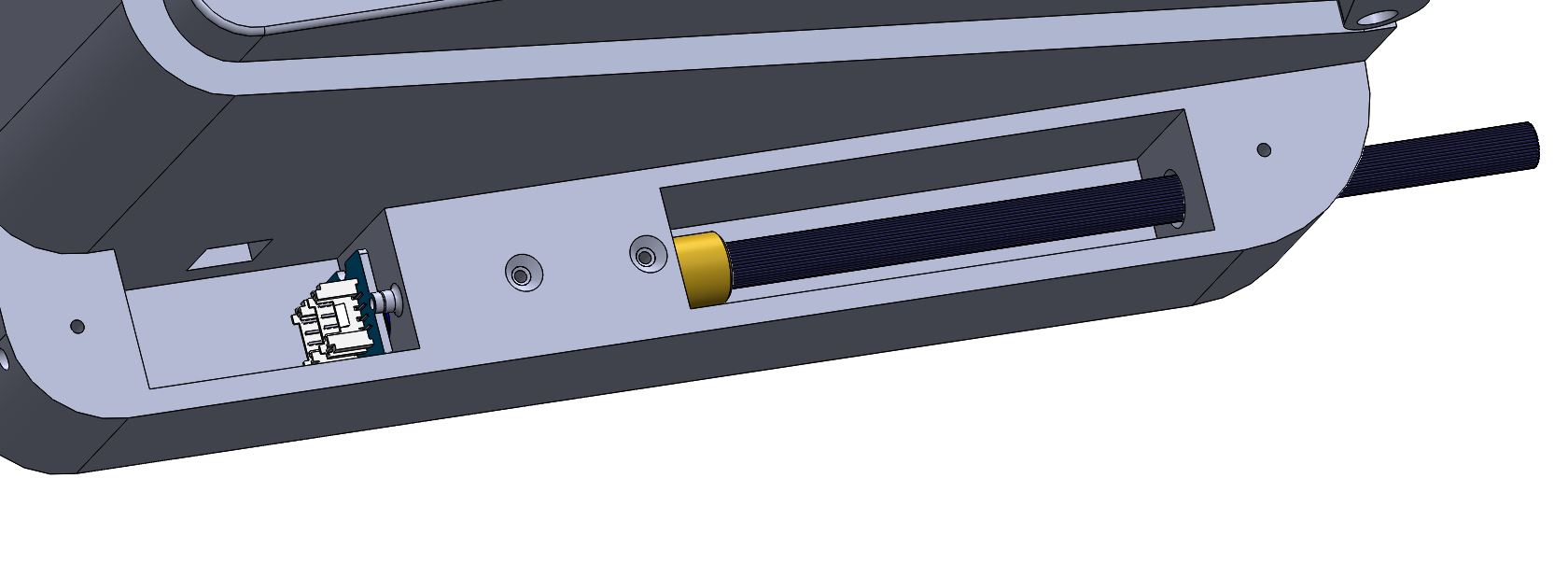
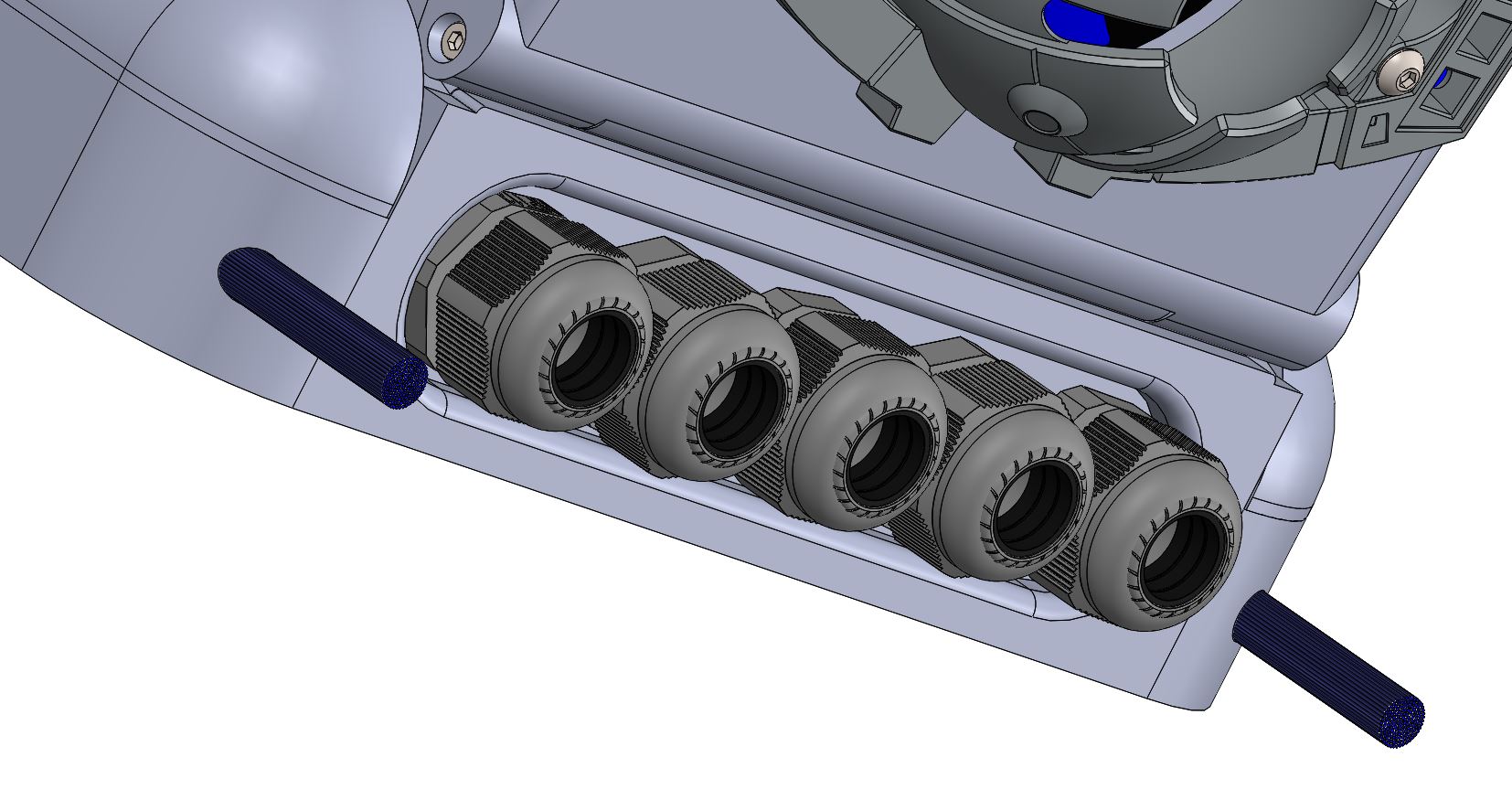
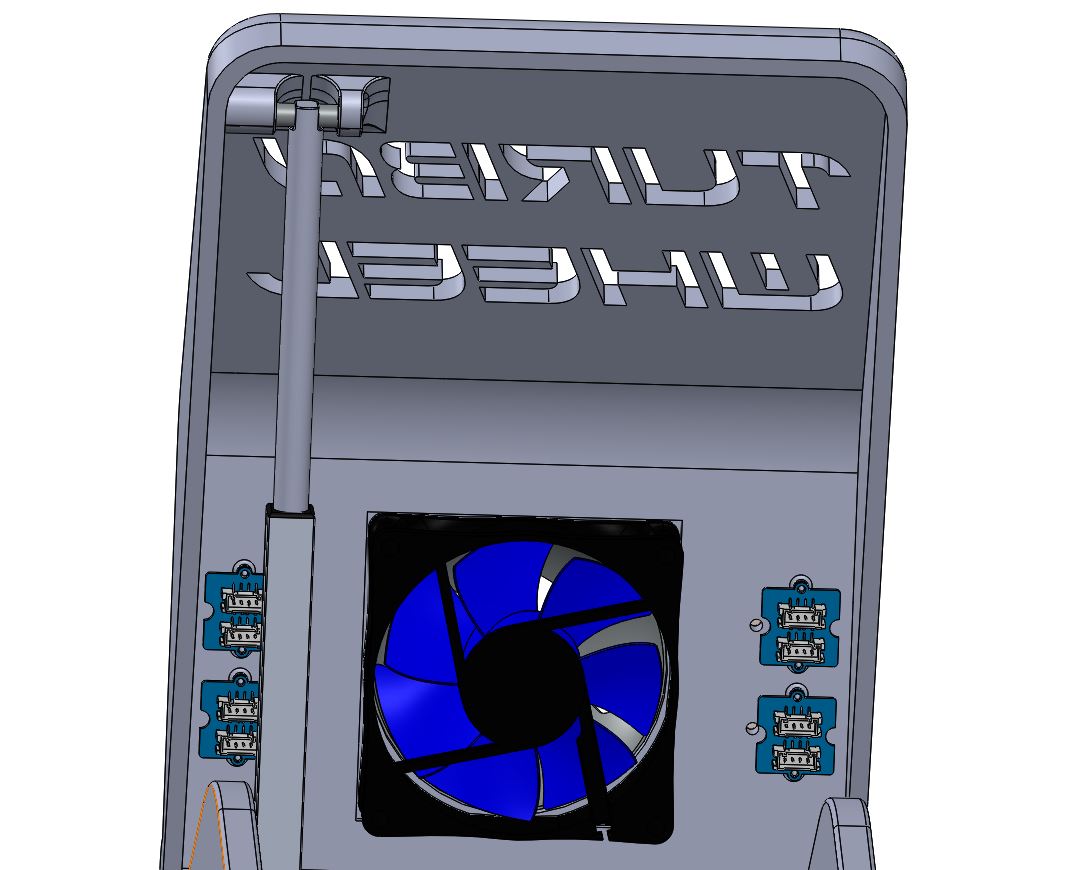
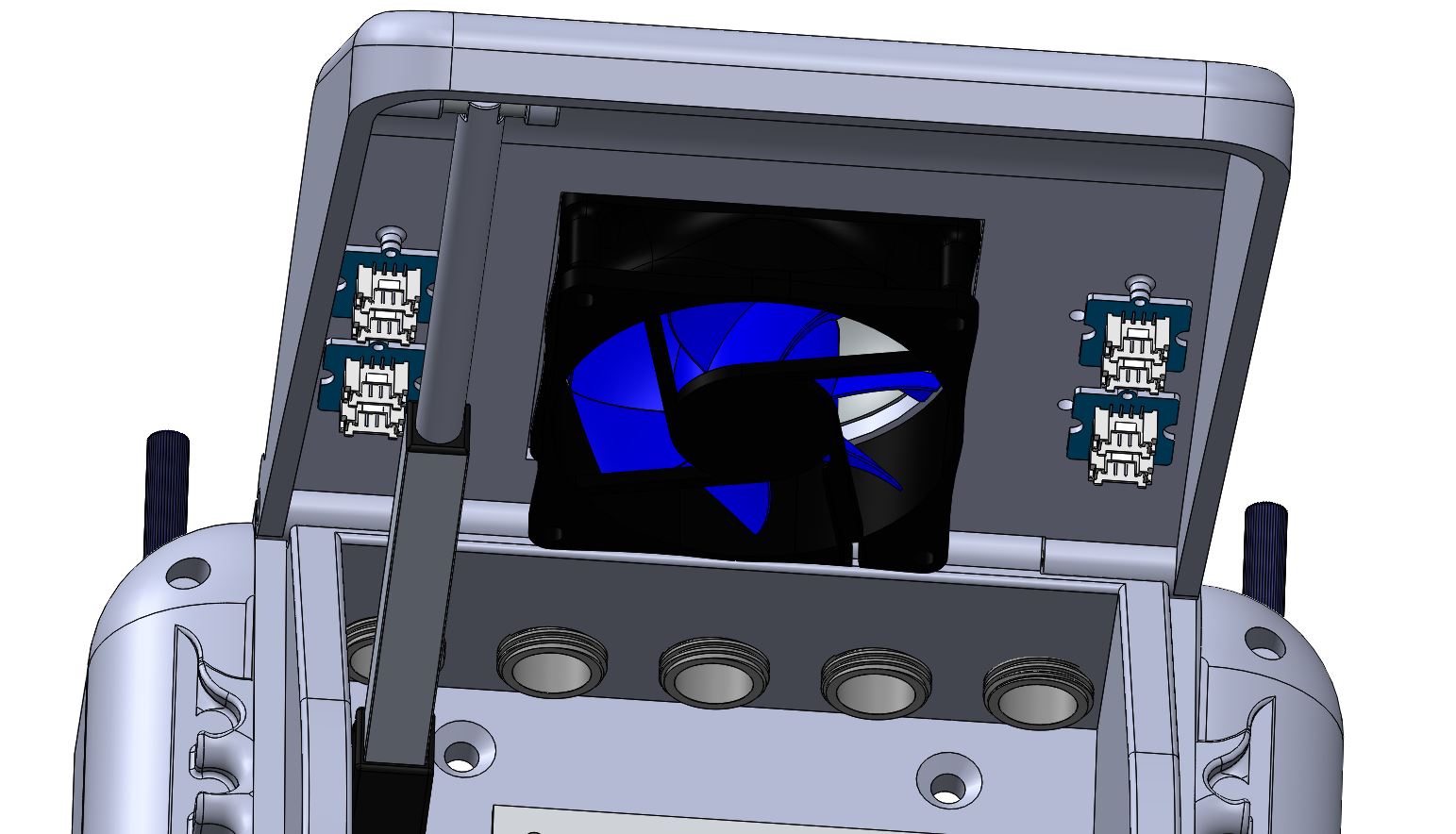
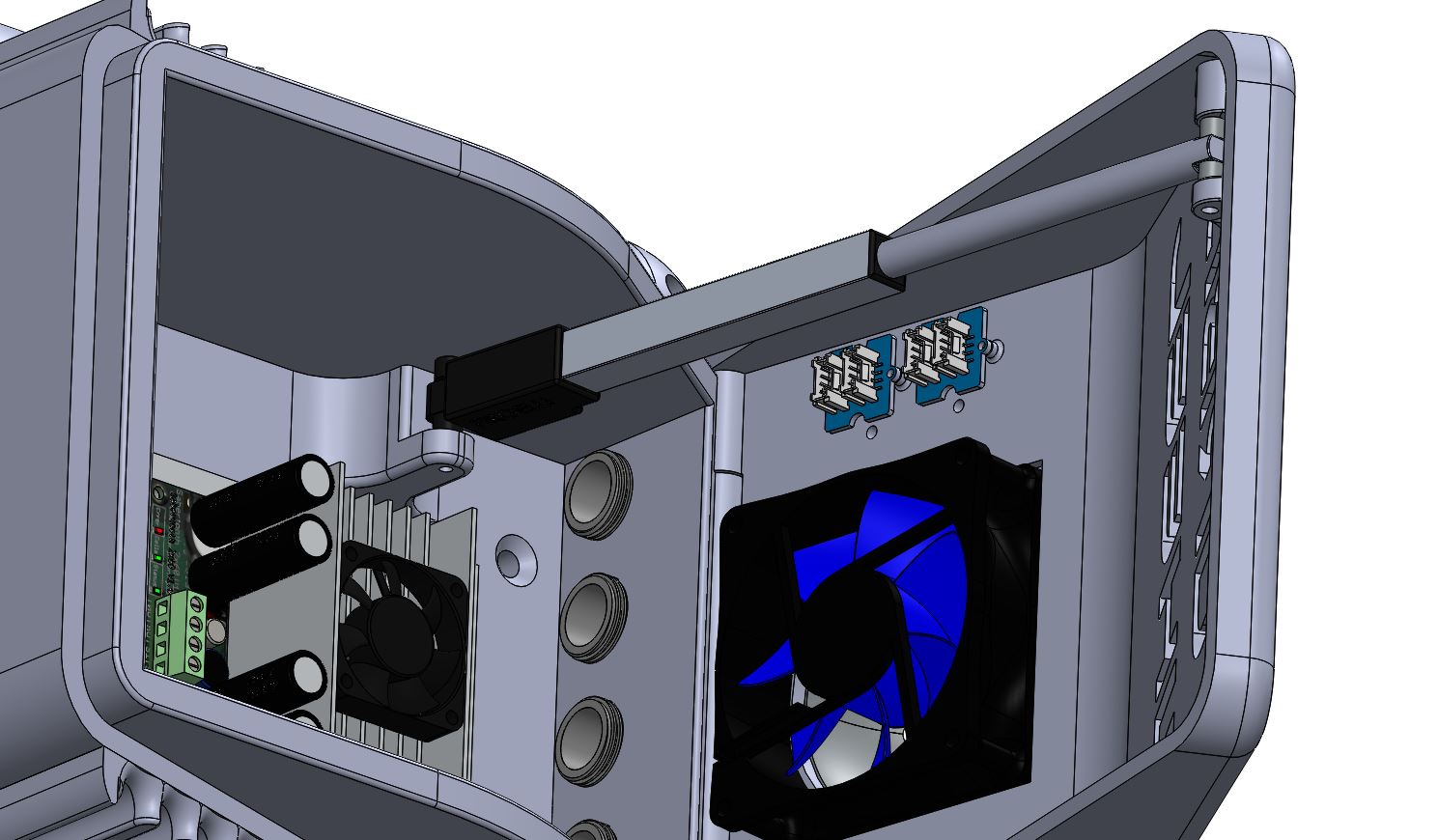
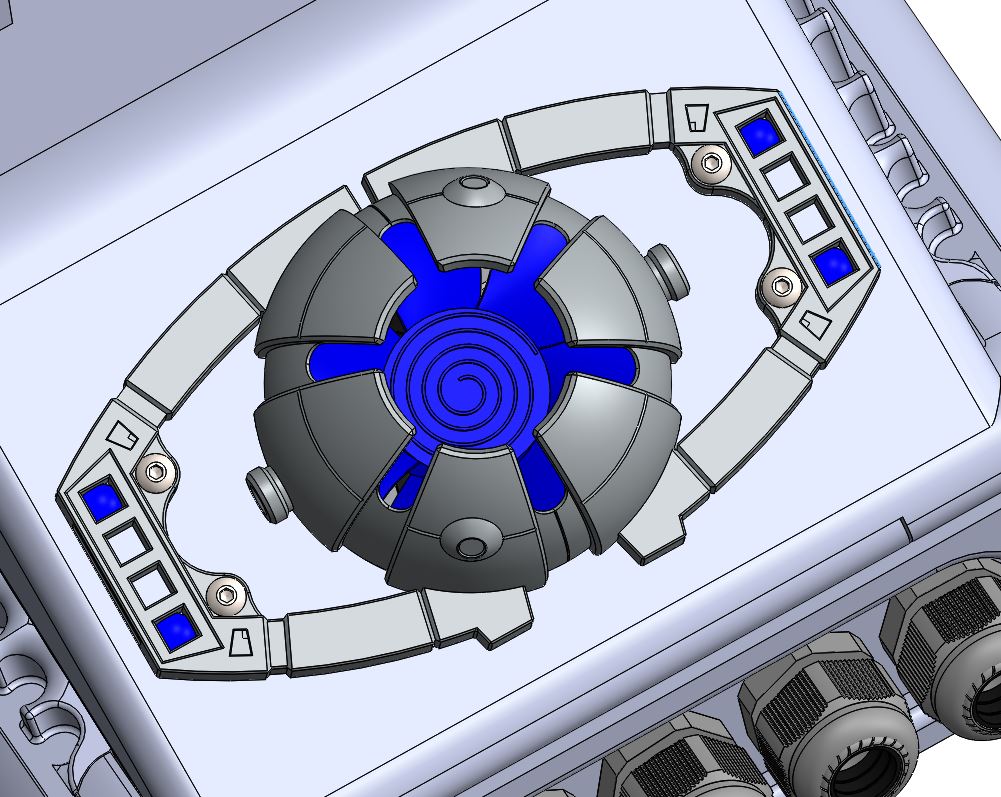
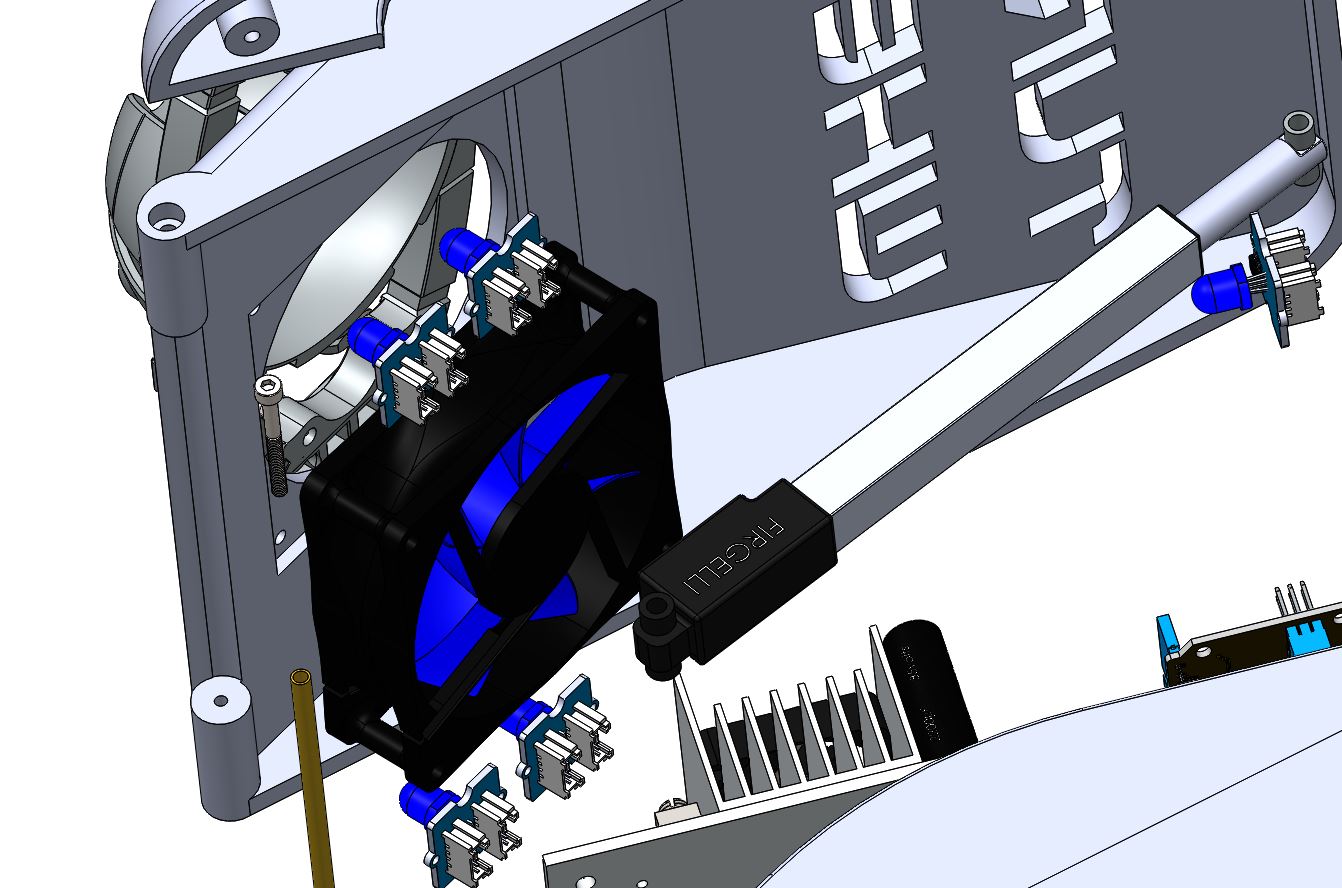
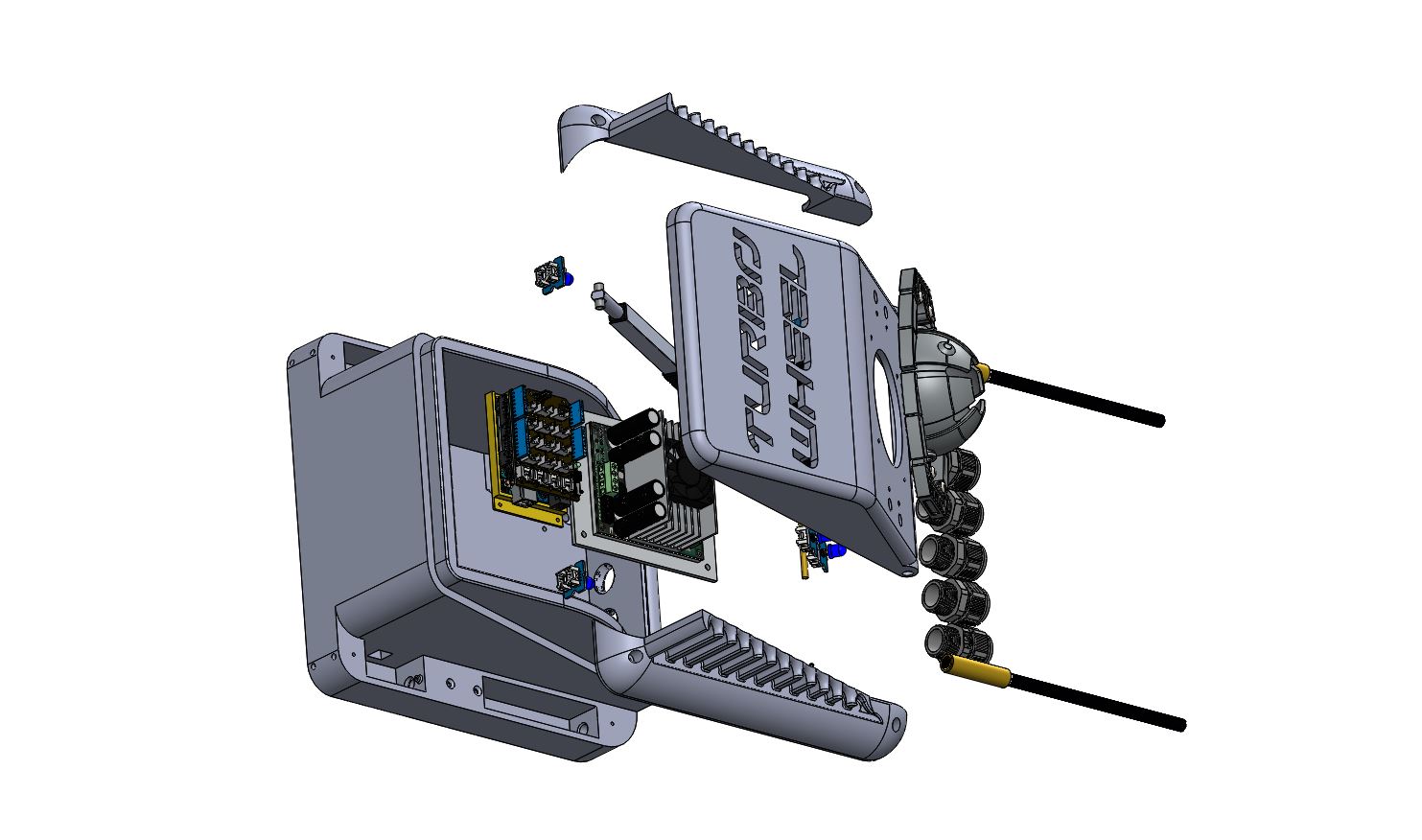
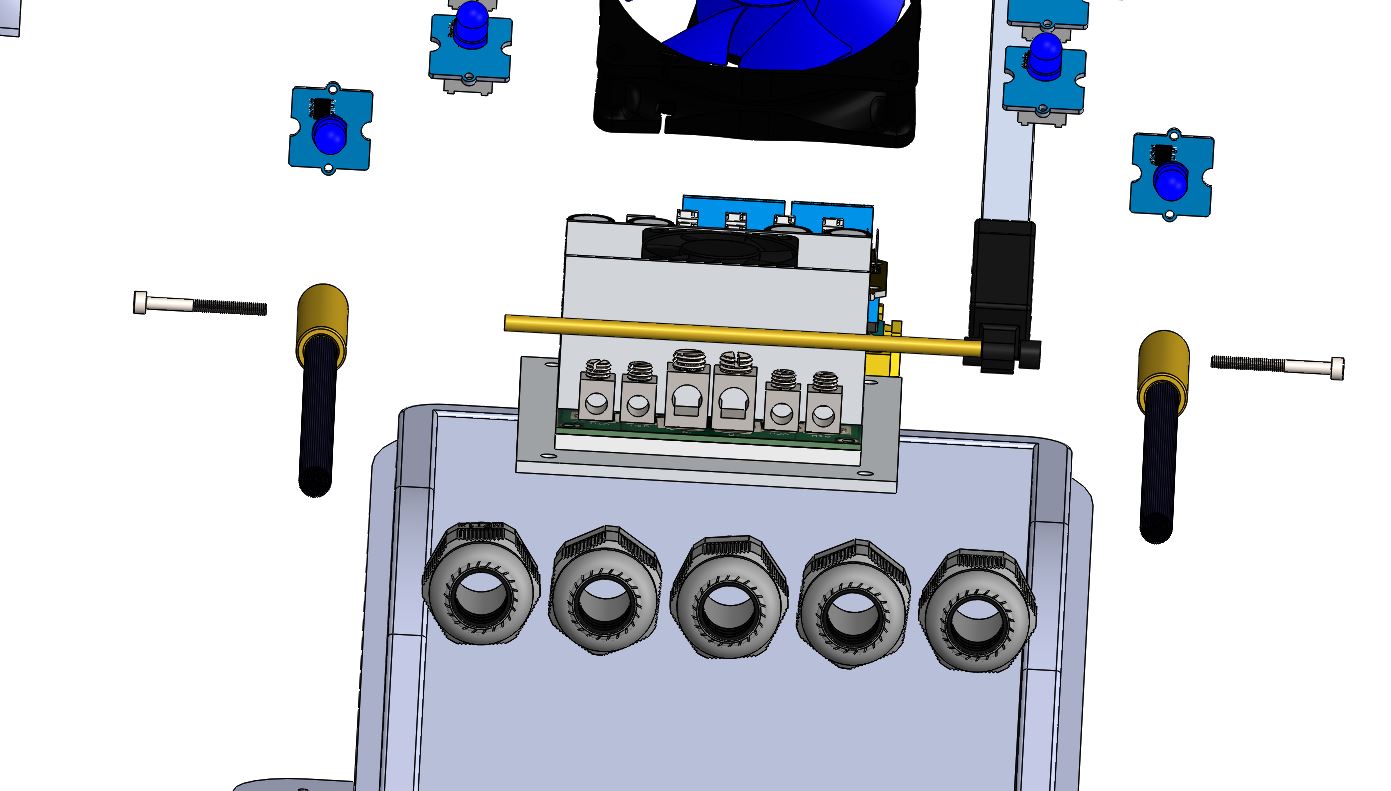
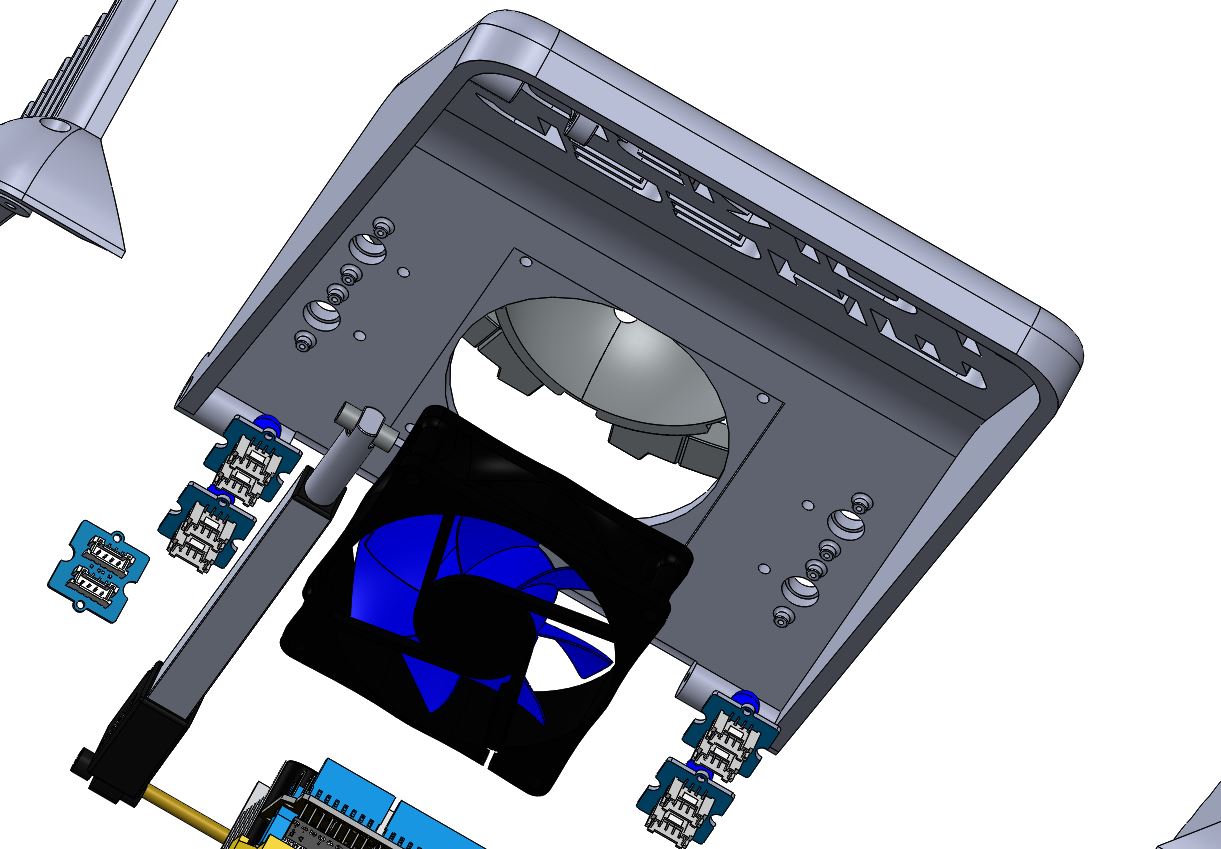
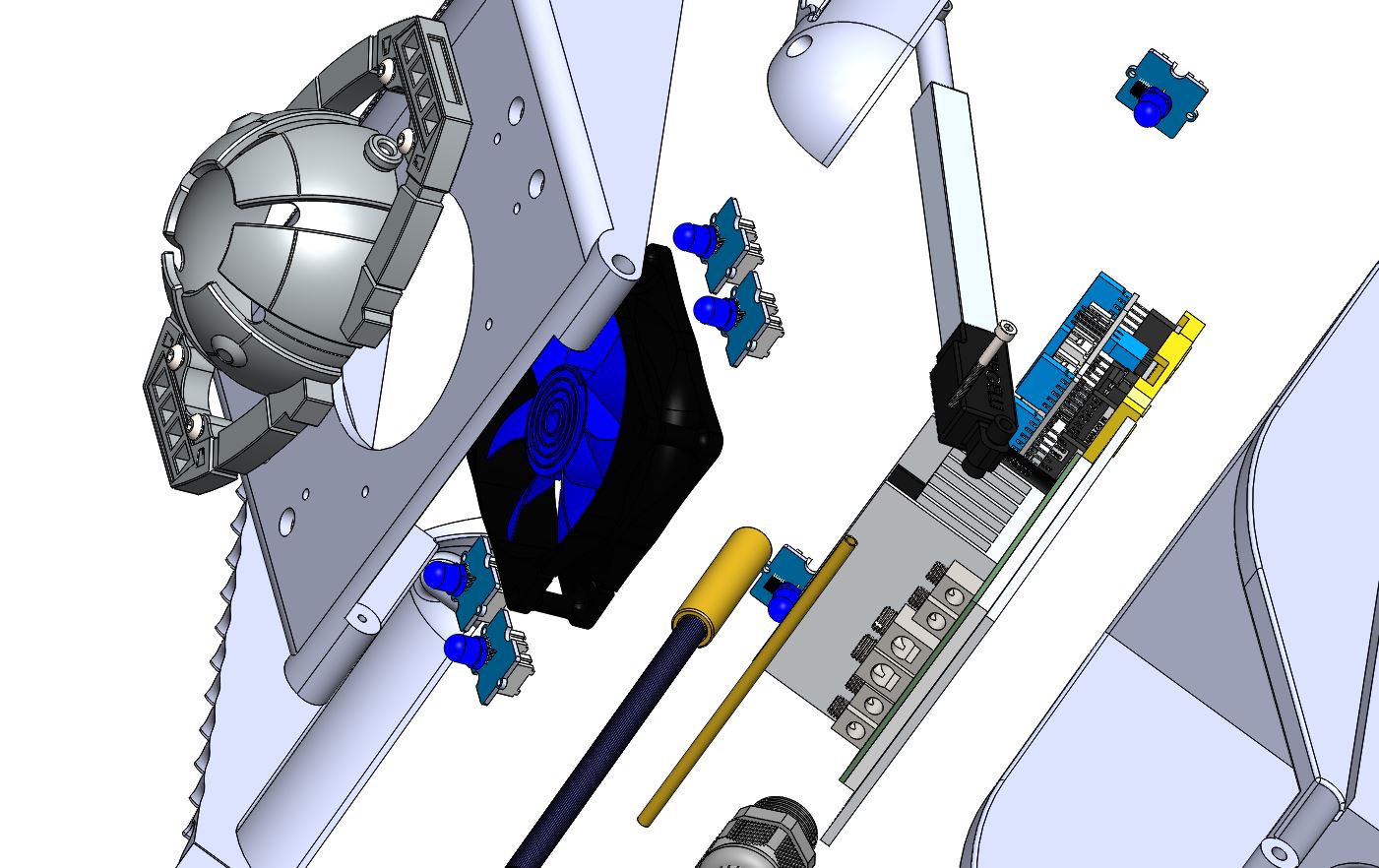
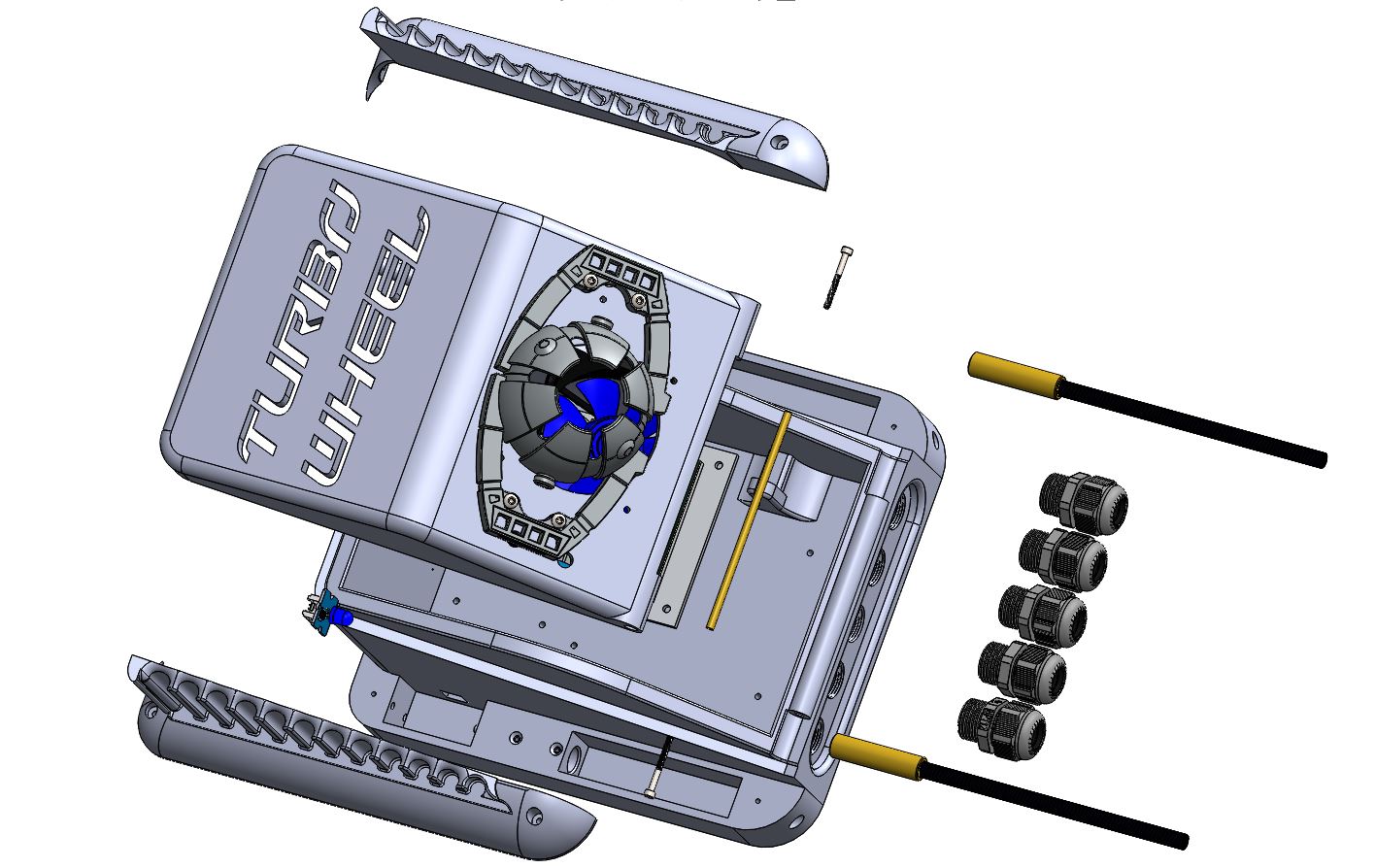
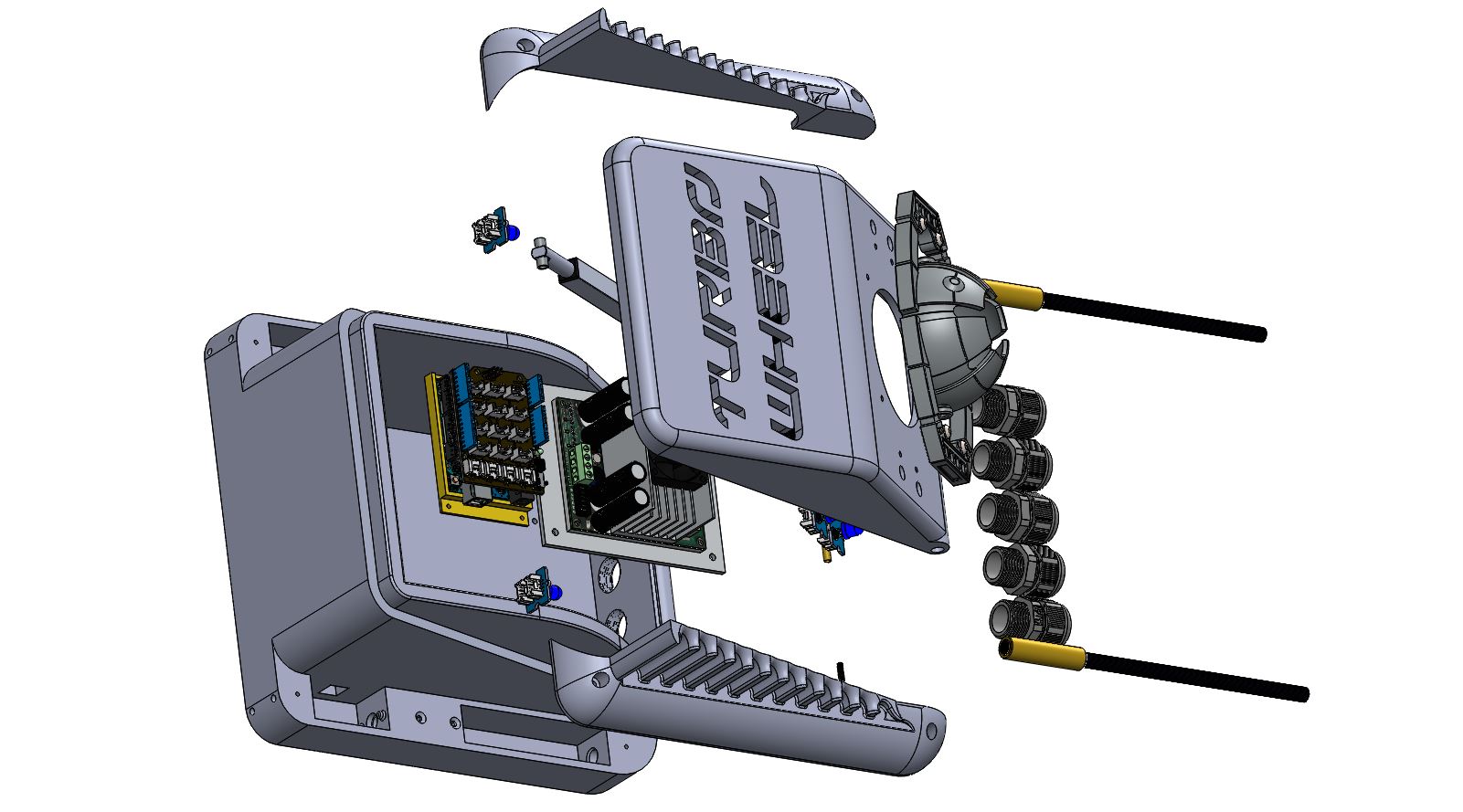
Le châssis du robot Maya fonctionne avec un variateur de type SaberTooth 2x60A. Ce variateur mérite un coffret de protection digne de Maya .Voici donc la version définitive du coffret.
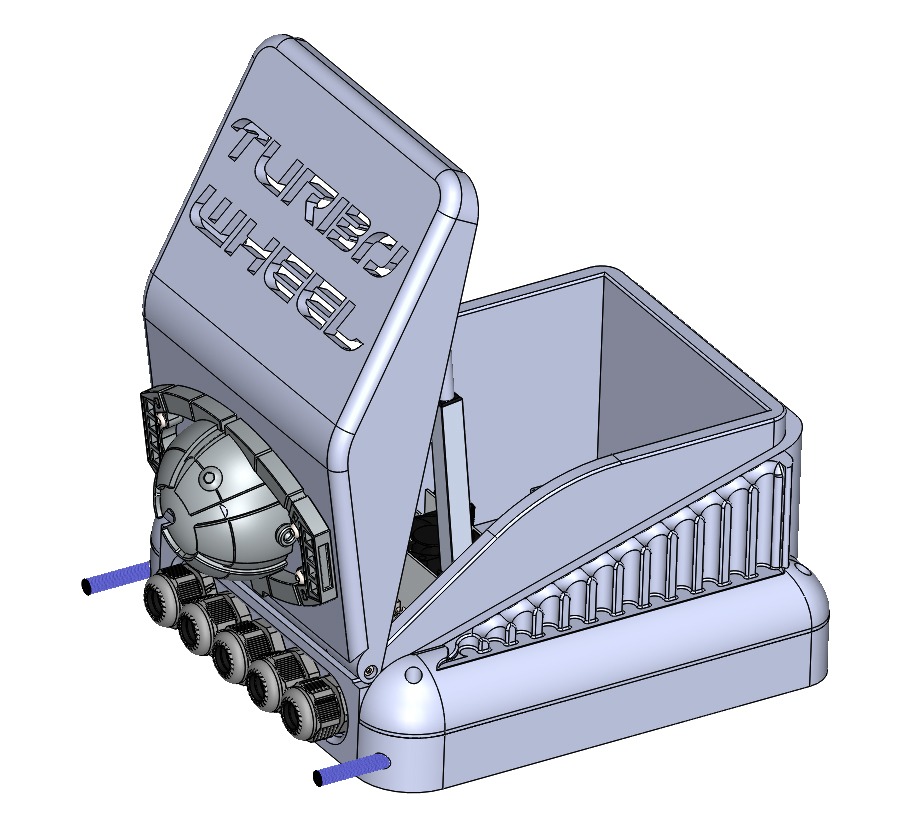
Coffret tuning pour variateur de propulsion – RedOhm
Description :
Protection du variateur de propulsion SaberTooth 2x60A
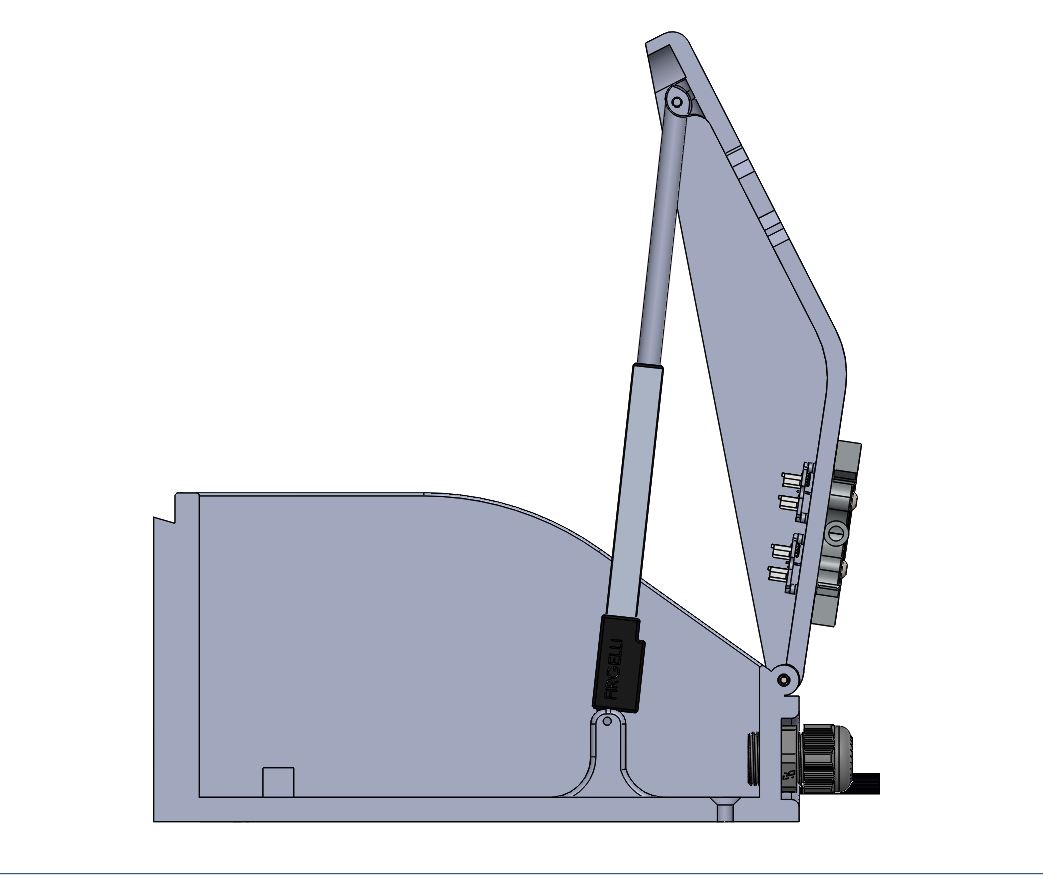
Ouverture du coffret par vérin électrique avec détecteur de gestes de chez Grove ,
Du tuning avec éclairage des gaines moteurs en fibre optique dépolie, et signalisation de l’état variateur sur LED RGB en face avant et enfin refroidissement avec ventilateur diamètre 80 bleu
–
| Diaporama ci-dessous du coffret variateur |
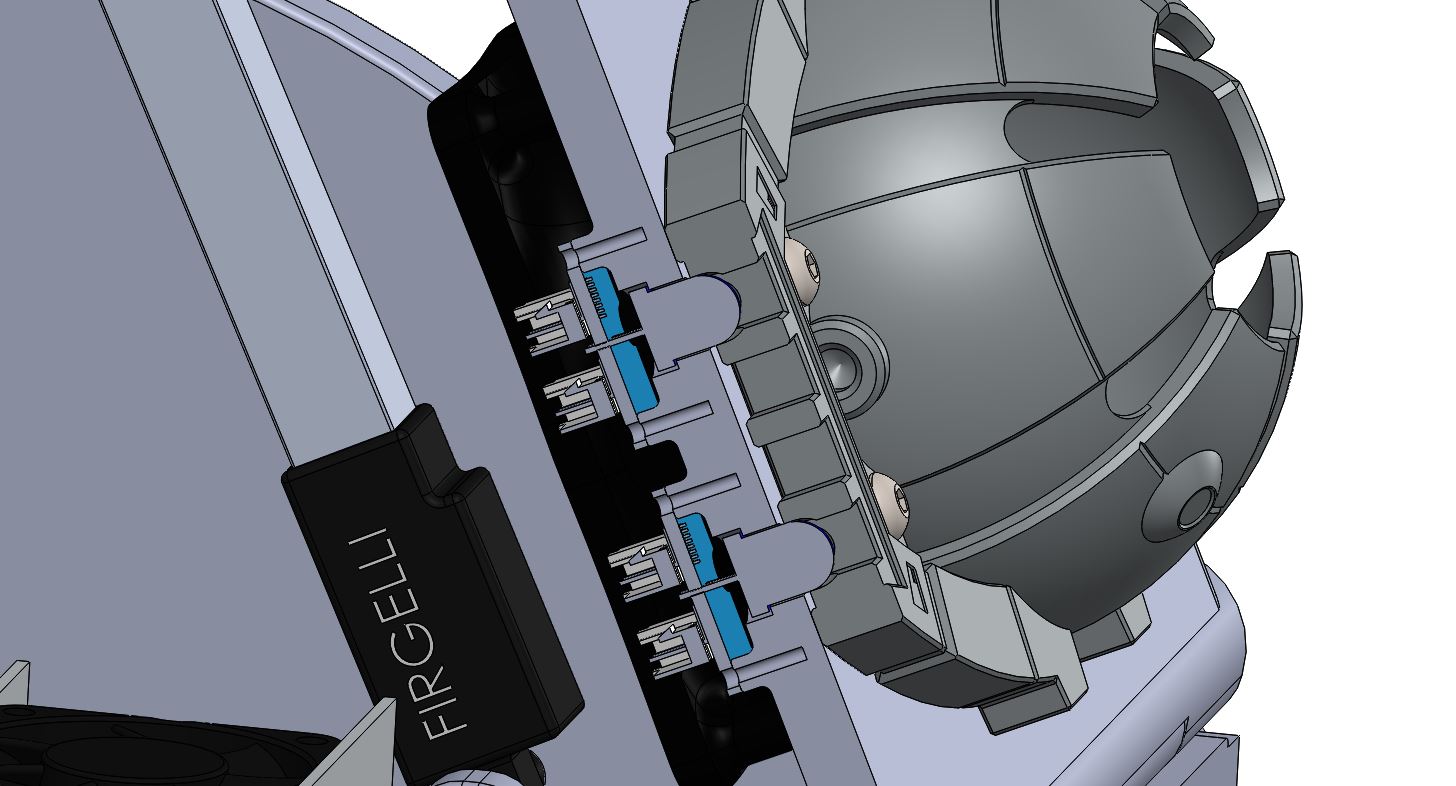
Type de matériel utilisé :
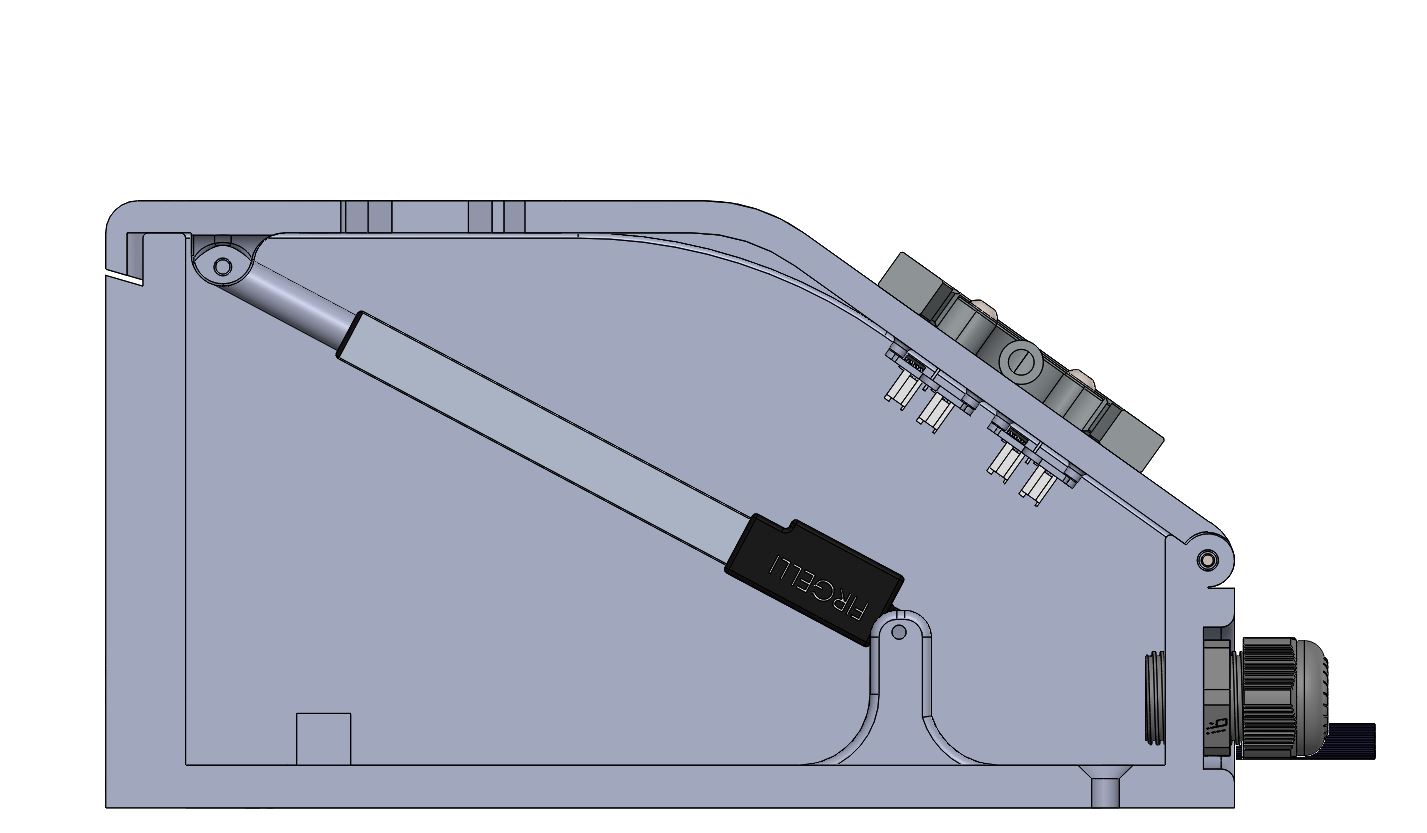
Actionneur linéaire L12-100-6R: L’actionneur maintient sa position en cas de coupure d’alimentation, à moins que la force appliquée n’excède la force de maintien.
Caractéristiques de l’actionneur linéaire : |
||
| Alimentation: 6 Vcc | Précision: 0,3 mm | Courant de blocage: 450 mA |
| Contrôle: signal RC servo | Réduction: 100:1 | Niveau sonore: 55 dB à 45 cm |
| Course maxi: 100 mm | Force: 23 N à 6 mm/s | Indice de protection: IP54 |
| Vitesse à vide: 12 mm/s | Force de maintien: 80 N | T° de travail: -10°C à +50°C |
| Précision: 0,3 mm | Cycle de charge: 20% | Section: 15 x 18 mm |
| Longueur: 160 mm au repos | Connectique: fiche JR | Poids: 56 g |
–
Led 8 mm RGB Grove 104030006 :Ce module led RGB 8 mm est compatible Grove et permet d’obtenir une couleur au choix à partir d’une sortie d’une microcontrôleur

Led 8 mm RGB Grove 104030006 – RedOhm
Caractéristiques de la Led 8 mm RGB Grove |
||
| Interface: compatible Grove | Alimentation: 5 Vcc | Couleur: RGB |
| Dimensions: 20 x 20 x 25 mm | ||
| Retour au sommaire |
![]()
06/08/2017
|
La structure du châssis de Maya est enfin terminée. Nous avons donc passé aux essais de roulage qui sont avérés plus que satisfaisant. Puisque le cahier des charges nous imposait une charge utile de 50kg, une vitesse de 5 à 6 km/h, un freinage très rapide avec récupération d’énergie. Sur cette vidéo, vous verrez donc le déplacement du châssis mais aussi les conseils techniques pour la création des pièces en aluminium.
La deuxième phase vient d’être lancée. C’est la partie câblage de l’ensemble du châssis. Voici le cahier des charges.
- Le groupe moto propulseur doit être refroidi aussitôt que la vitesse des groupes excède 50°.
- Le châssis possède 1 coupe batterie à l’arrière.
- De chaque côté du châssis, il y a un arrêt d’urgence qui coupe l’ensemble du robot sur la partie puissance. L’intégrité de son système de contrôle reste toujours alimentée malgré un arrêt d’urgence.
- Le coffret qui détient le variateur possède son propre système de refroidissement. Il est contrôlé par la carte Arduino qui se trouve à l’intérieur de celui-ci.
- Un interrupteur de by passe vous permettra de passer en radio commande pour pouvoir déplacer le robot à des fins de maintenance ou de positionnement.
Les plans mécaniques seront bientôt disponibles, de même que l’ensemble des schémas électriques qui régissent le châssis.
| Retour au sommaire |
![]()
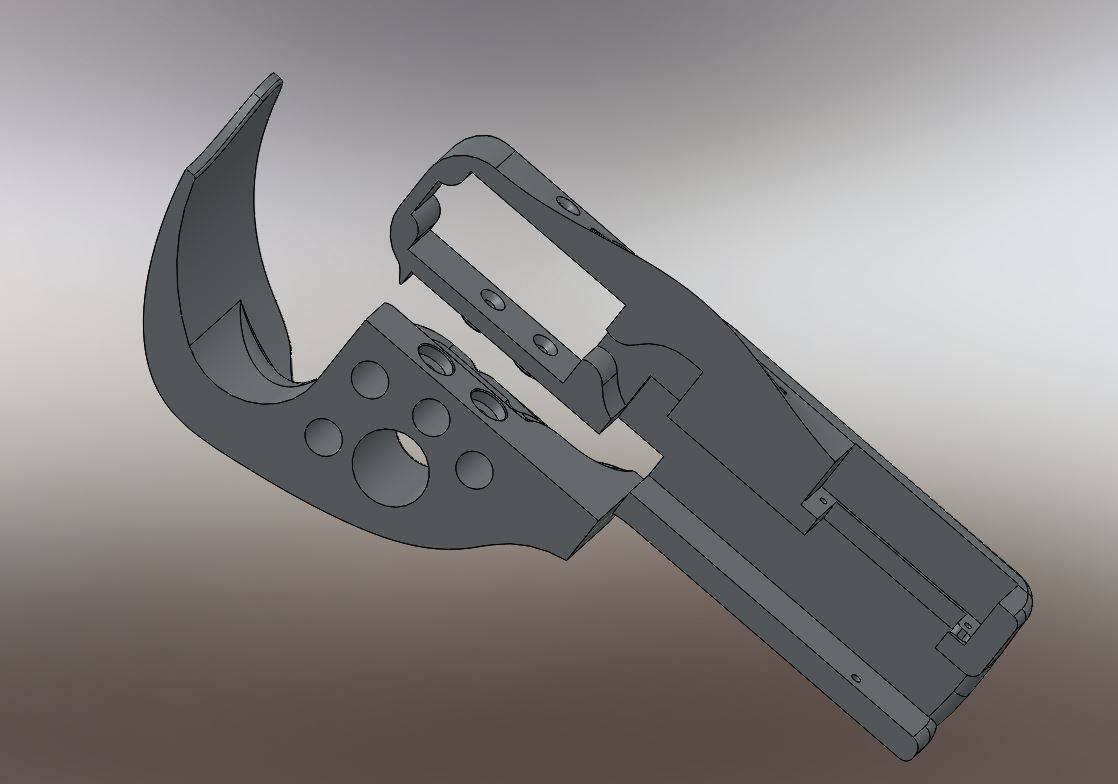
Vue du fonctionnement de la main de Maya |
–
Pour le fonctionnement des doigts, nous allons utiliser le servomoteur Batan S1123 . Pourquoi ce servomoteur ? Est bien simplement car il n’est pas comme les autres. Il dispose d’un fil de retour d’information (feed-back), cette information nous permet de connaître la position du servomoteur précisément. La valeur lue est une valeur analogique, qui peut être lu facilement soit sur une carte Arduino soit sur la carte Ez-Robot. Cette information nous sera utile pour le cas suivant, sommes-nous bien arrivés à la valeur fixée, si l’information de retour ne correspond pas à la valeur fixée on n’en déduira que le moteur est bloqué et dans ce là, le servomoteur chauffe, et au pire des cas, il peut se détruire.
–
Fiche technique du servomoteur Batan S1123 |
|
| Poids | 13.82g |
| Dimensions | 11.57,32.71,31.76mm |
| Couple | 13.kg.cm |
| Type de pignon | Plastique |
| Roulement à billes | 2BB |
| Nombre de dents | 22 |
| Retour au sommaire |
![]()
![]()
.
Rappel : Documentations sur le matériel utile dans nos réalisations.
Mise à jour de 26/11/2019
Sommaire :
- Contrôleur de servomoteurs.
- Contrôleur de servomoteurs 6 canaux : micro Maestro 6
- Présentation de la carte micro Maestro 6
- Méthodes de contrôle
- Brochage du module micro Maestro 6
- Informations complémentaires
- Caractéristique
- Contrôleur de servomoteurs 12 canaux : Mini Maestro 12 ( en cours )
- Contrôleur de servomoteurs 6 canaux : micro Maestro 6
- Commande de moteur en courant continu
- Commande de moteur CC MC33926 2,5A . Référence fabricant: 1212
- Capteur de courant à effet hall
- ACS714 capteur de courant -30A to +30A
Retour au sommaire
![]()
Présentation de l’article. |
Nous avons remarqué que pour certains constructeurs, lorsque le materiel devient obsolète , il est difficile de se procurer: drivers, schéma, exemple de programme ou même sous quel système d’exploitation ce materiel fonctionnait, alors que nous en possédons encore dans nos tiroirs . C’est pour cela que nous avons décidé de stocker le maximum d’information sur notre site . Evidemment cela ne concerne que le materiel que nous utilisons .
Vous trouverez donc dans cette page aussi bien du materiel récent mais aussi du matériel d’ancienne génération .
Un ensemble de programme vous sera proposé pour chaque élément que nous utilisons sur nos robots .
Retour au sommaire
![]()
Contrôleur de servomoteurs 6 canaux
|
1 ) Présentation de la carte .

Micro Maestro 6 canaux Pololu vue de la carte
Les 6 canaux Micro Maestro élèvent les performances des contrôleurs de servo de série, avec des fonctionnalités telles que l’interface USB natif, le TTL et le contrôle de scripts embarqués.
Très performant, il permet un contrôle fin pour la vitesse et l’accélération grâce à sa résolution élevée (0.25µs).
2) 3 méthodes de contrôle : USB, série TTL (5 V) et script interne
- USB pour une connexion directe à un ordinateur, via un logiciel disponible en libre téléchargement (sous environnement Windows ou Linux).
- Série TTL pour une utilisation avec les systèmes embarqués.
- Scripts embarqués que vous pourrez programmer (depuis votre ordinateur), puis faire « rejouer » de façon autonome par le module (sans qu’il soit connecté à l’ordinateur). Pour ce faire, le module dispose d’une mémoire interne de 8 Kb laquelle permet la mémorisation d’un script d’environ 3000 positions de servomoteurs .
3 ) Brochage du module micro Maestro 6
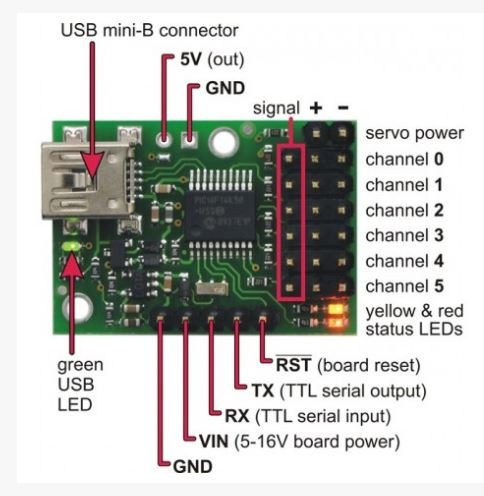
Micro Maestro 6 canaux Pololu repérage des pins de la carte
4 ) Informations complémentaires
- Résolution de largeur d’impulsions de sortie de 0,25 µs ce qui équivaut à environ 0,025° pour un servomoteur classique.
- Fréquence des impulsions configurable de 33 à 100 Hz
- Large gamme d’impulsions de 64 à 3280 µs en utilisant l’ensemble des six servos avec un taux d’impulsions de 50 Hz
- Commande individuelle de vitesse et d’accélération pour chaque canal
- Les canaux peuvent aussi être utilisés comme sorties numériques ou entrées analogiques à usage général
- Un langage de script simple vous permet de programmer le contrôleur pour effectuer des actions complexes, même après avoir enlevé les connexions USB et série.
- L’application de contrôle et de configuration gratuite pour Windows vous permet facilement de configurer et tester votre contrôleur , créer, exécuter et enregistrer des séquences de mouvements de servo pour des animations électroniques et des robots marcheurs et écrire faire défiler et exécuter des scripts stockés dans le contrôleur de servomoteur
- Le port COM virtuel permet de créer facilement des applications personnalisées pour envoyer des commandes de série via USB au contrôleur.
- Caractéristiques de la série TTL
- Prise en charge de 300 à 250 000 kbps en mode de bauds fixes.
- Prise en charge de 300 à 115 200 kbps en mode de détection automatique de bauds
- Prise en charge simultanée du protocole Pololu, qui donne accès à des fonctionnalités avancées, et du protocole plus simple Scott Edwards MiniSSC II (il n’est pas nécessaire de configurer le dispositif pour un mode de protocole particulier).
- Peut être monté en série avec d’autres contrôleurs de moteur et de servo Pololu en utilisant une seule ligne de transmission de série
Caracteristique :
Alimentation: 5 à 16V ( attention a l’alimentation des servomoteurs )
Consommation : 40 à 50 mA max
Dimensions: 2,15 cm x 3,04 cm
Poids : 4,8 g
Référence fabricant: Contrôleur Micro Maestro 6
Prix moyen entre :15 à 17€
Information à telecharger:
Guide utilisateur Maestro -> [En] Maestro User’s Guide
| Retour au sommaire . |
![]()
Contrôleur de servomoteurs 12 canaux
|
en cours
| Retour au sommaire . |
![]()
Commande de moteur CC MC33926 2,5A .
|
–
Cette commande basée sur le circuit MC33926 permet de contrôler un moteur CC jusqu’à 2,5 A à partir d’une sortie PWM d’un microcontrôleur (Arduino, Seeeduino, etc).
Une tension de feedback permet d’avoir un retour sur la consommation du moteur. Ce module de petites dimensions est protégé contre les inversions de polarité, les surintensités et les échauffements excessifs.
Caractéristiques techniques
Alimentation:
Partie logique: 2,5 à 5,5 Vcc
Partie moteur: 5 à 28 Vcc
Sortie moteur : 2,5 A (5 A en pointe)
Feedback » retour information » consommation moteur: environ 525 mV/A
Dimensions: 31 x 26 x 12 mm
Référence fabricant: 1212
Prix moyen entre :15 à 18€
Support pour ce module : RedOhm impression 3D
–
Raccordement du module :
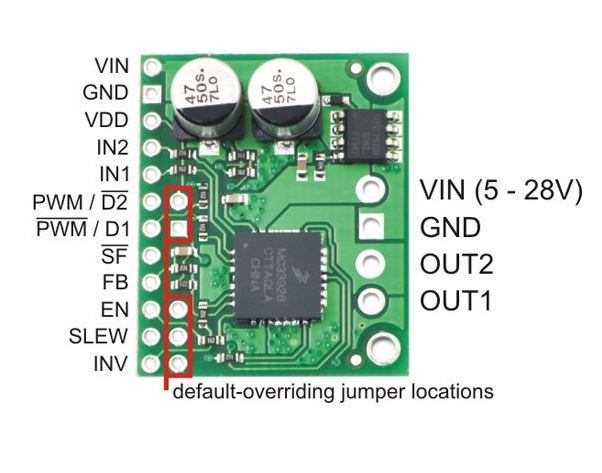
Pololu 1212 raccordement du module
| Retour au sommaire . |
![]()
Capteur de courant à effet hall
|
Le capteur de courant à effet Hall est un type de capteur de courant exploitant l’effet Hall pour produire une tension qui est l’image exacte (avec un facteur de proportionnalité connu) du courant à mesurer ou à visualiser.
L’effet Hall « classique » a été découvert en 1879 par Edwin Herbert Hall qui l’a énoncé comme suit : « un courant électrique traversant un matériau baignant dans un champ magnétique, engendre une tension perpendiculaire à ce dernier ». Sous certaines conditions, cette tension croît par paliers
Information technique supplémentaire
| Retour au sommaire . |
![]()
Capteur de courant à effet hall
|
1 ) Présentation de la carte .
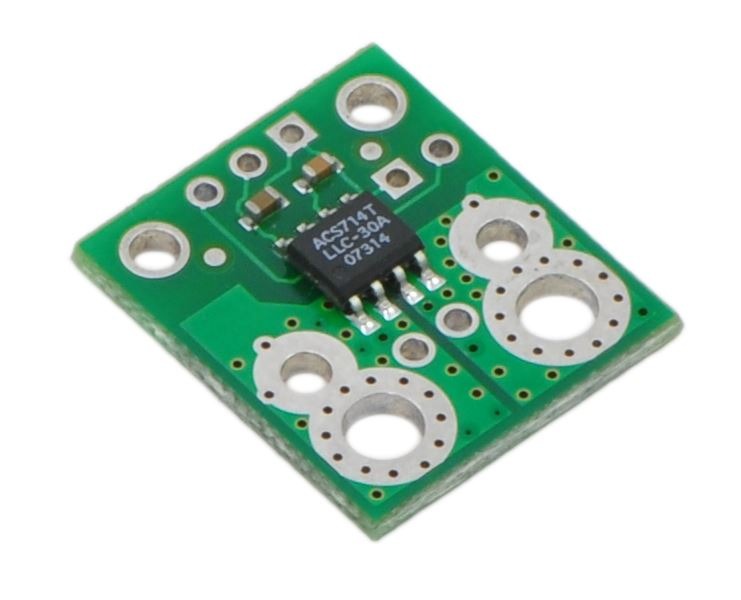
Capteur de courant 30A ACS714 Pololu
Ce capteur de courant basé sur un circuit à effet Hall ACS711EX permet de mesurer un courant de -30 A à +30 A. Une sortie analogique est proportionnelle au courant mesuré (2,5 V pour 0 A sous 5 Vcc). Un connecteur 5 broches est inclus (non soudé).
Montage de la carte :
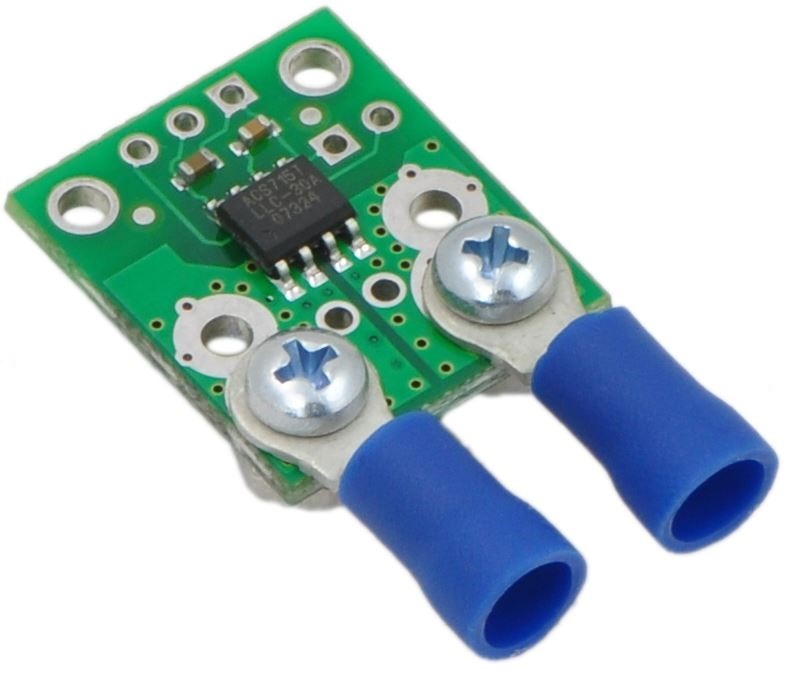
Capteur de courant 30A ACS714 Pololu
Caractéristiques techniques
Alimentation: 3,3 à 5,0 Vcc
Consommation: 4 mA
Plage de mesure: -30 A à +30 A en AC ou DC
Plage d’utilisation: 30 Volts maxi
Sensibilité: 68 mV/A à 5 Vcc (45 mV/A à 3,3 Vcc)
Précision: ±4 %
Shunt: 0,6 mΩ
Bande passante: 100 kHz
T° de service: -40 à +125 °C
Dimensions: 21 x 18 x 3 mm
Référence fabricant: 2453
| Retour au sommaire . |
![]()
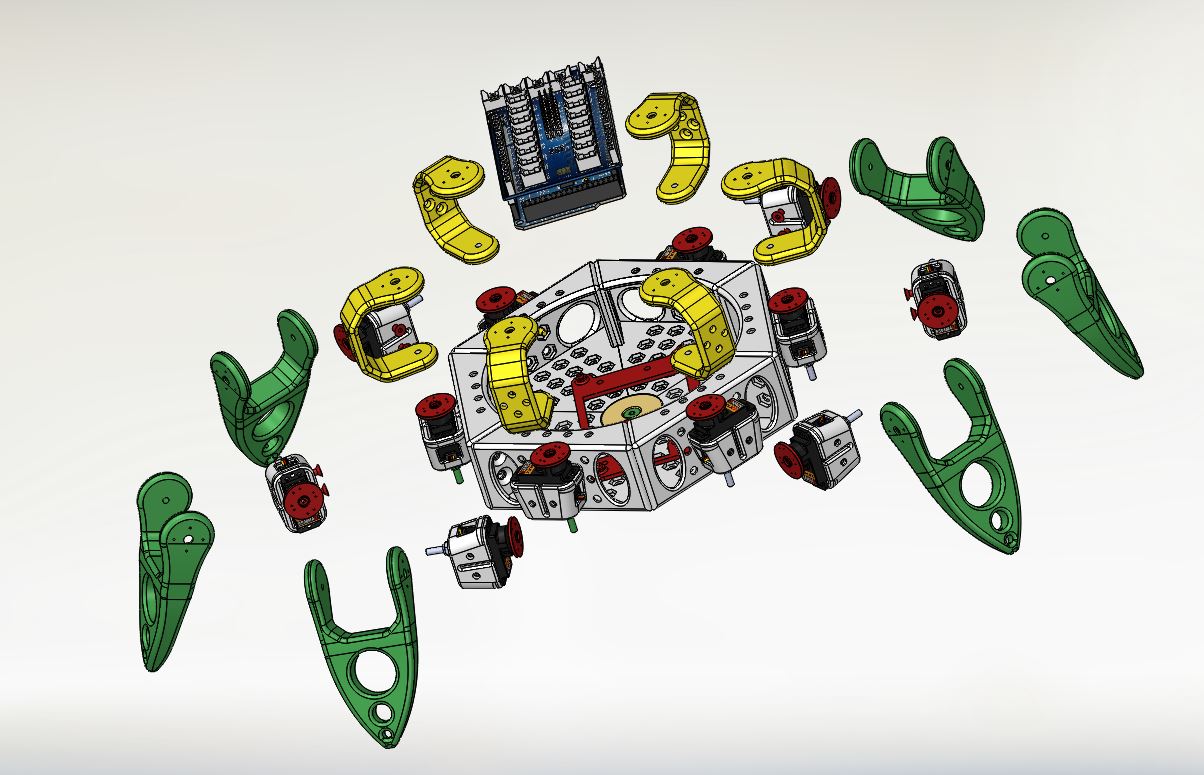
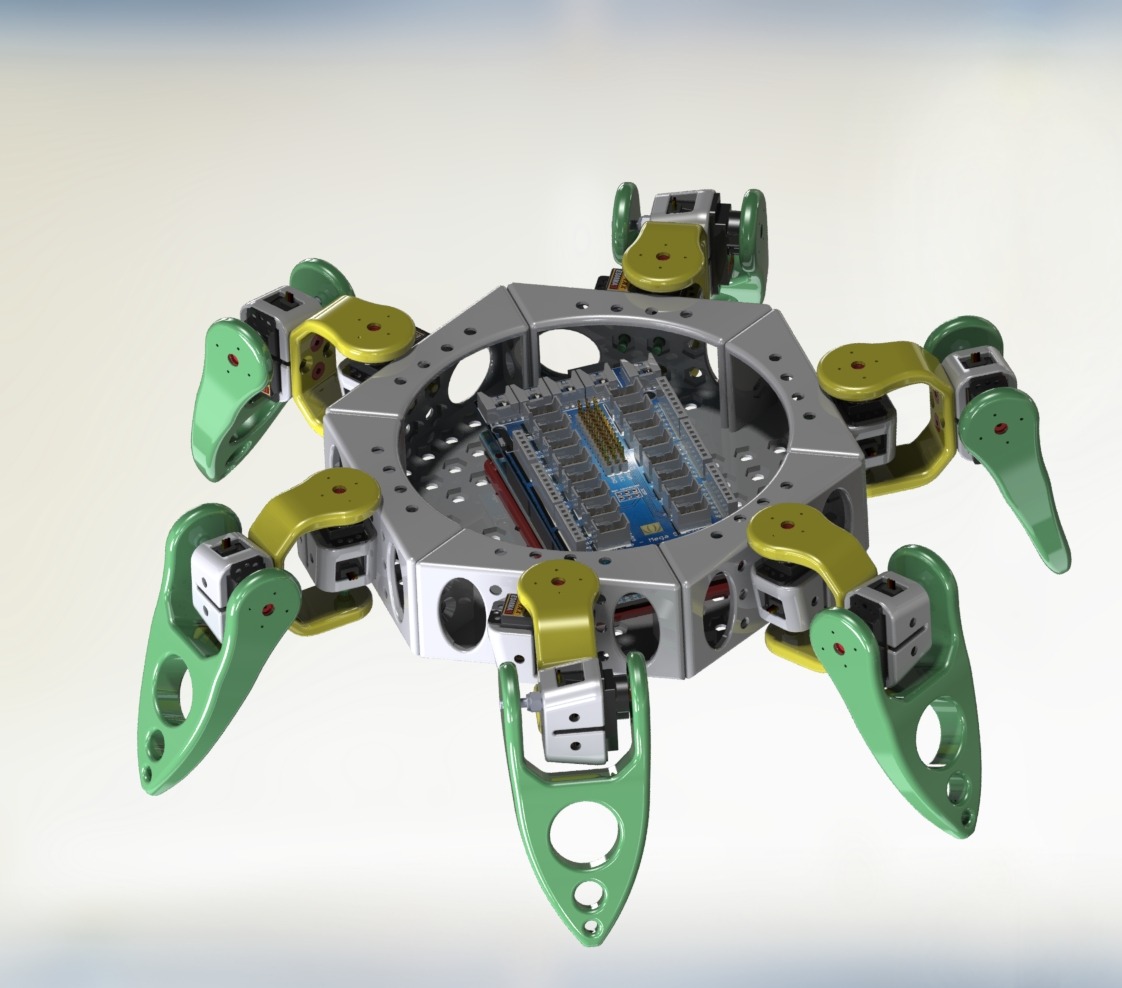
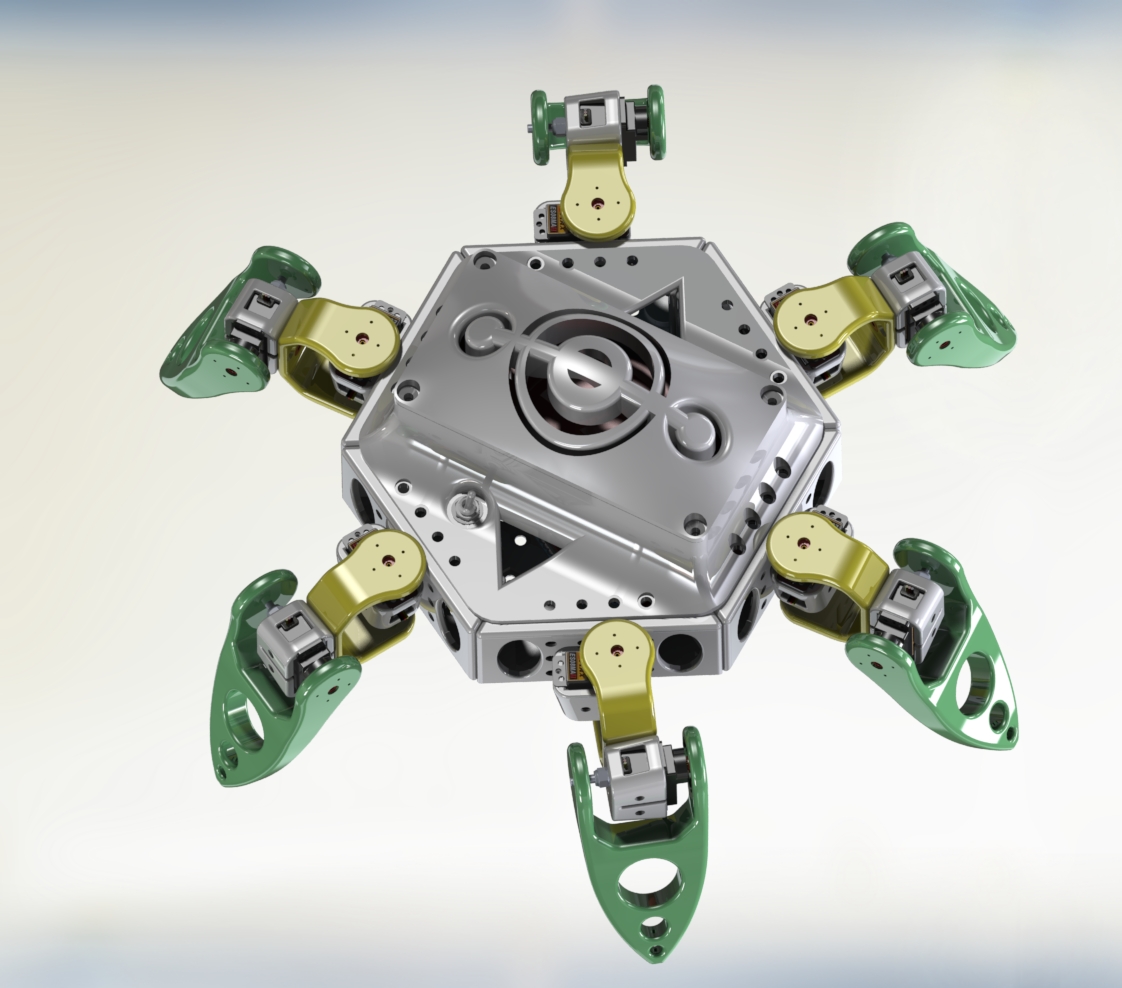
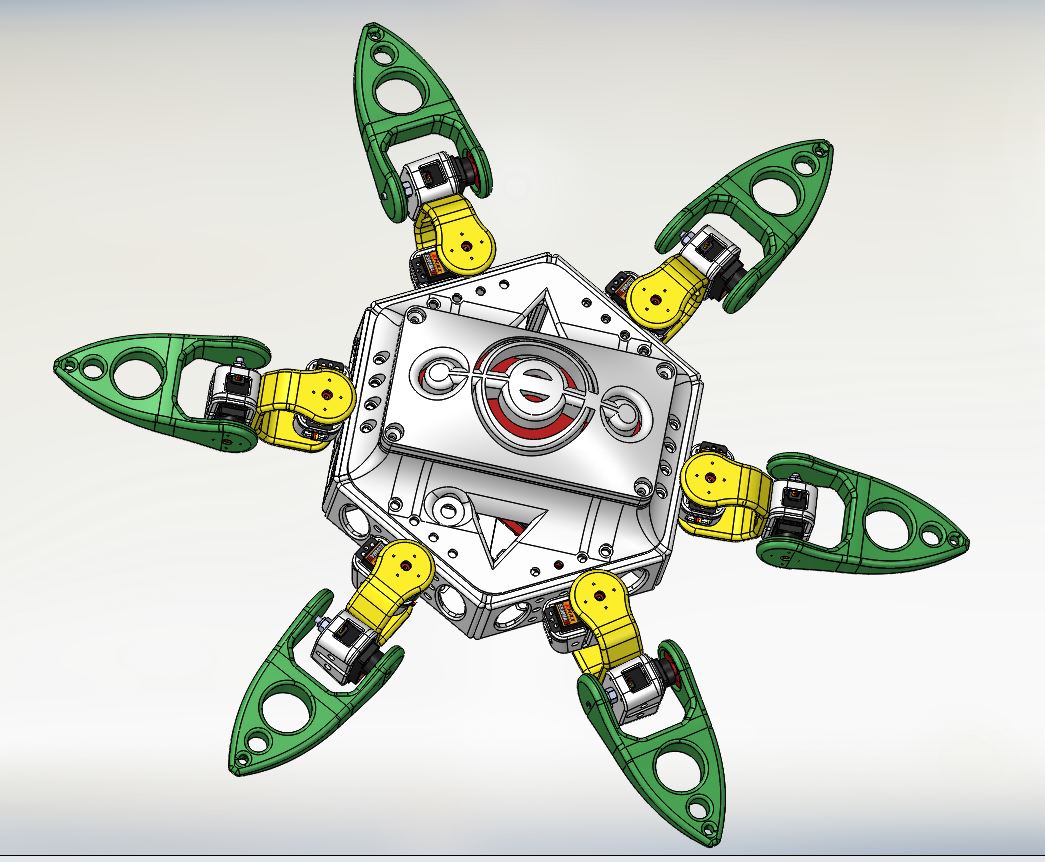
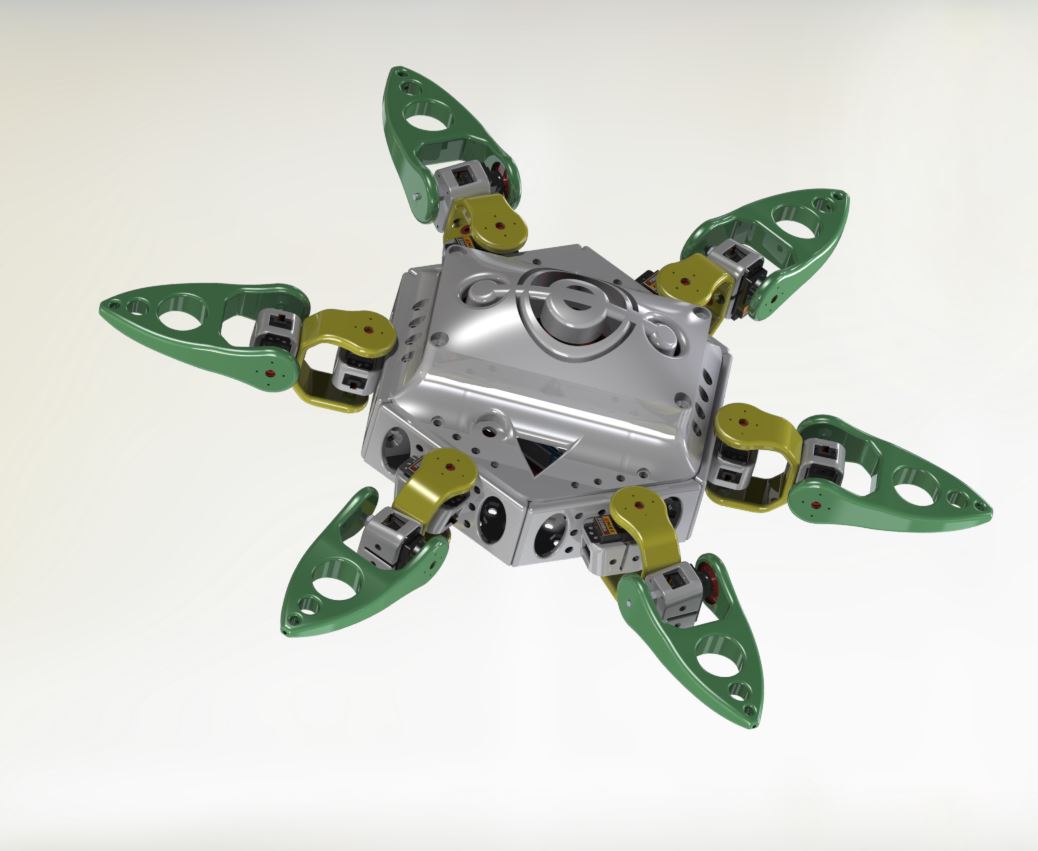
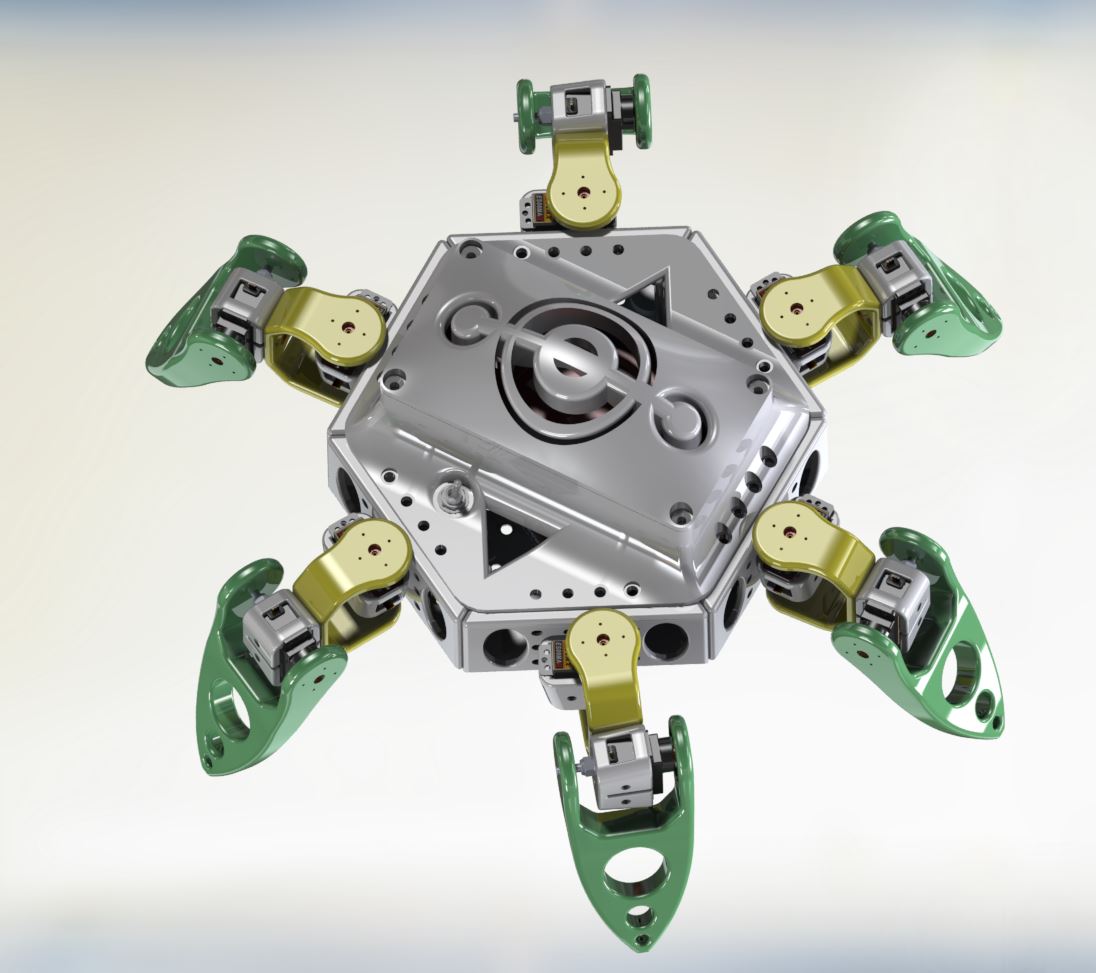
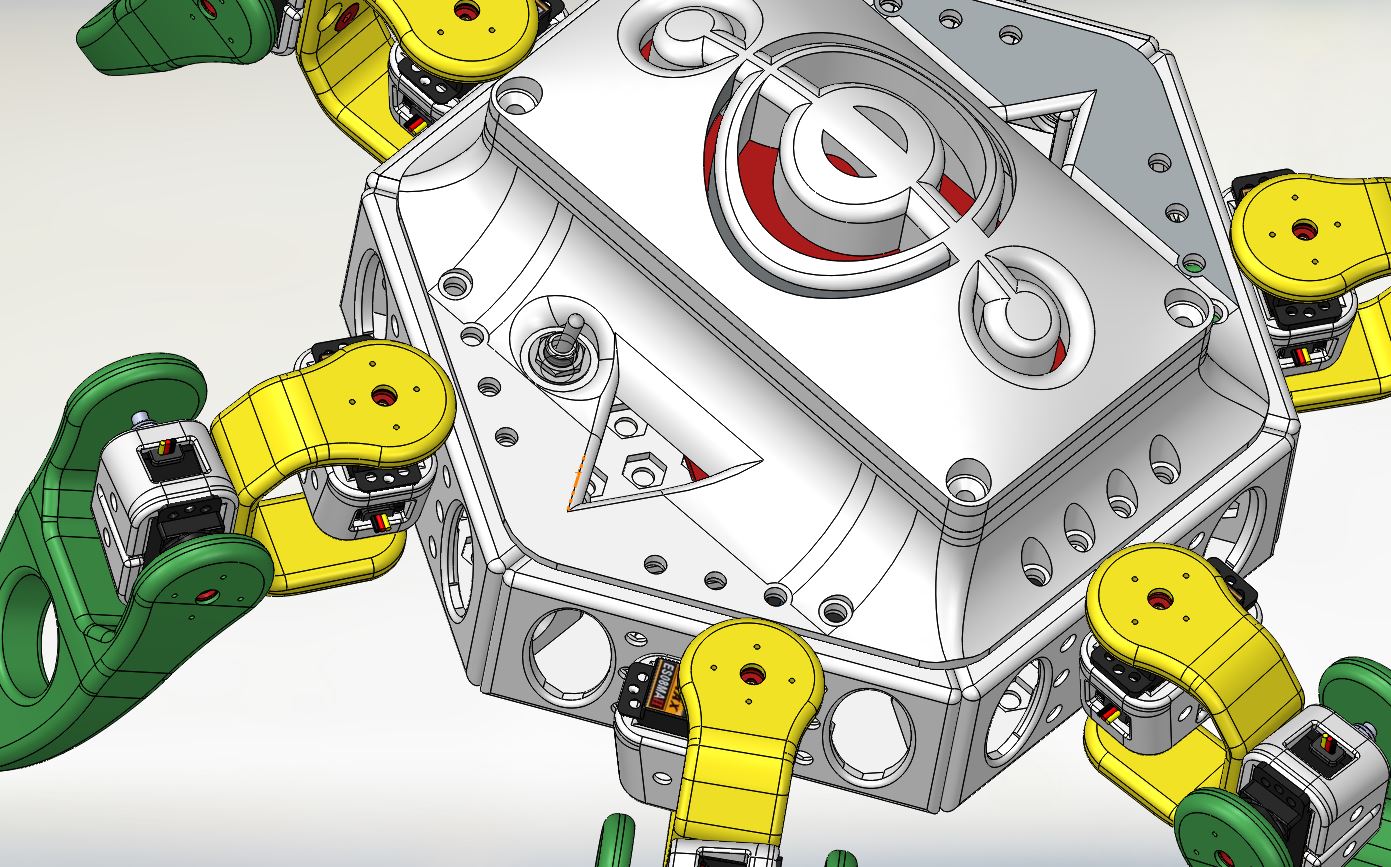
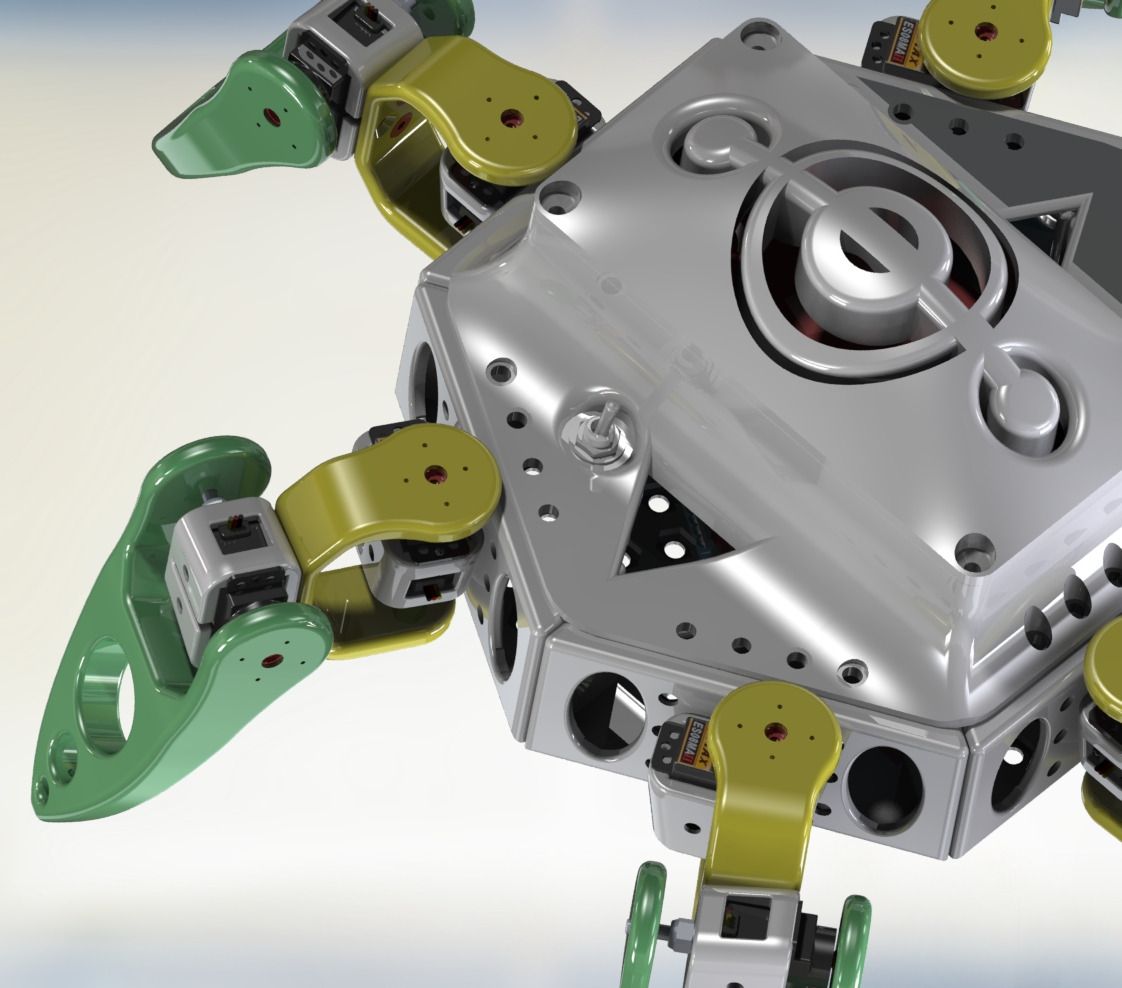
Mise à jour le 29/06/2019: Retrouvez sur cette page l’ensemble des articles concernant le robot Spider S12-PC ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )
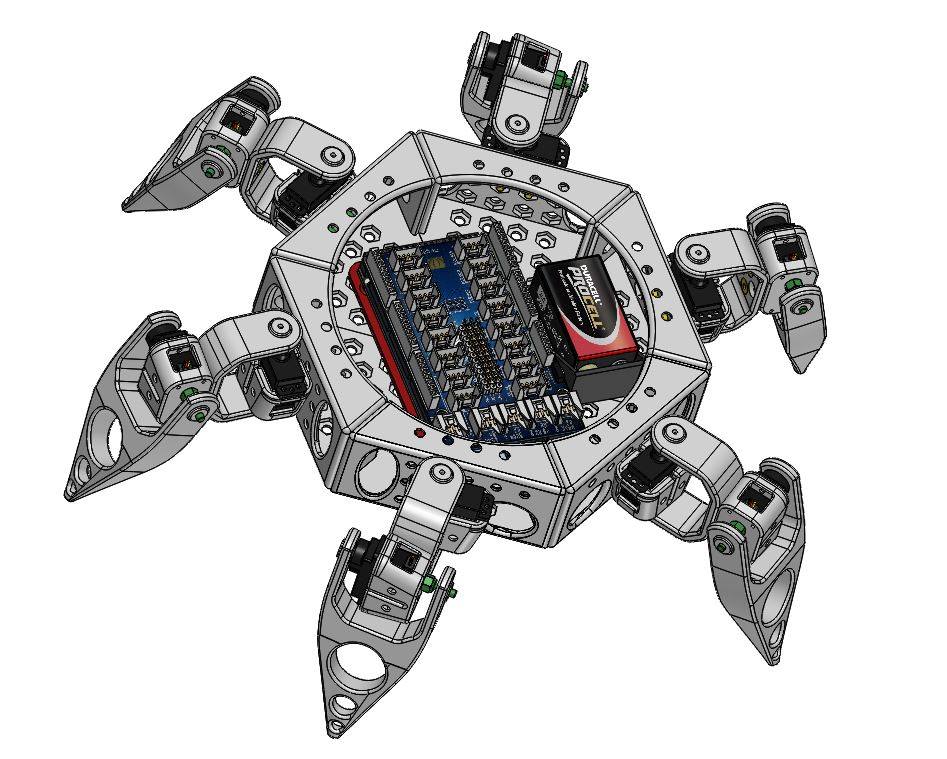
Mini Spider S12 patte courte Version 02022017 – RedOhm
Sommaire :
- Version 1.00 ou Version 02-02-2017. Vue éclatée de mini Spider S12-PC pour le choix des pièce , ensemble des fichiers à télécharger .
- Version 09-02-2017 .Vue éclatée de mini Spider S12-PC pour le choix des pièce ensemble des fichiers à télécharger . ( Cette version est conseillée pour les néophytes de l’impression 3D ) .
- Fichier pour le porte batterie et capot
- Repérage des numéros des servomoteurs .
- Divers programmes .
- Programme de calibrage des moteurs ( Positionnement a 90° du servomoteur ).
- Programme d’initialisation de mini-spider et un petit bonjour
- Programme d’enchaînement de divers sous programme ( Initialisation spider , petit bonjour , position d’attaque de Spider ,rotation de Spider)
- Explication de l’alimentation des servomoteurs.
- Présentation de Mr le régulateur 7806 en boitier TO220.
- Retour au menu nos robots
Vue éclatée de mini Spider S12-PC et l’ensemble des fichiers à télécharger . Version 1.00 |

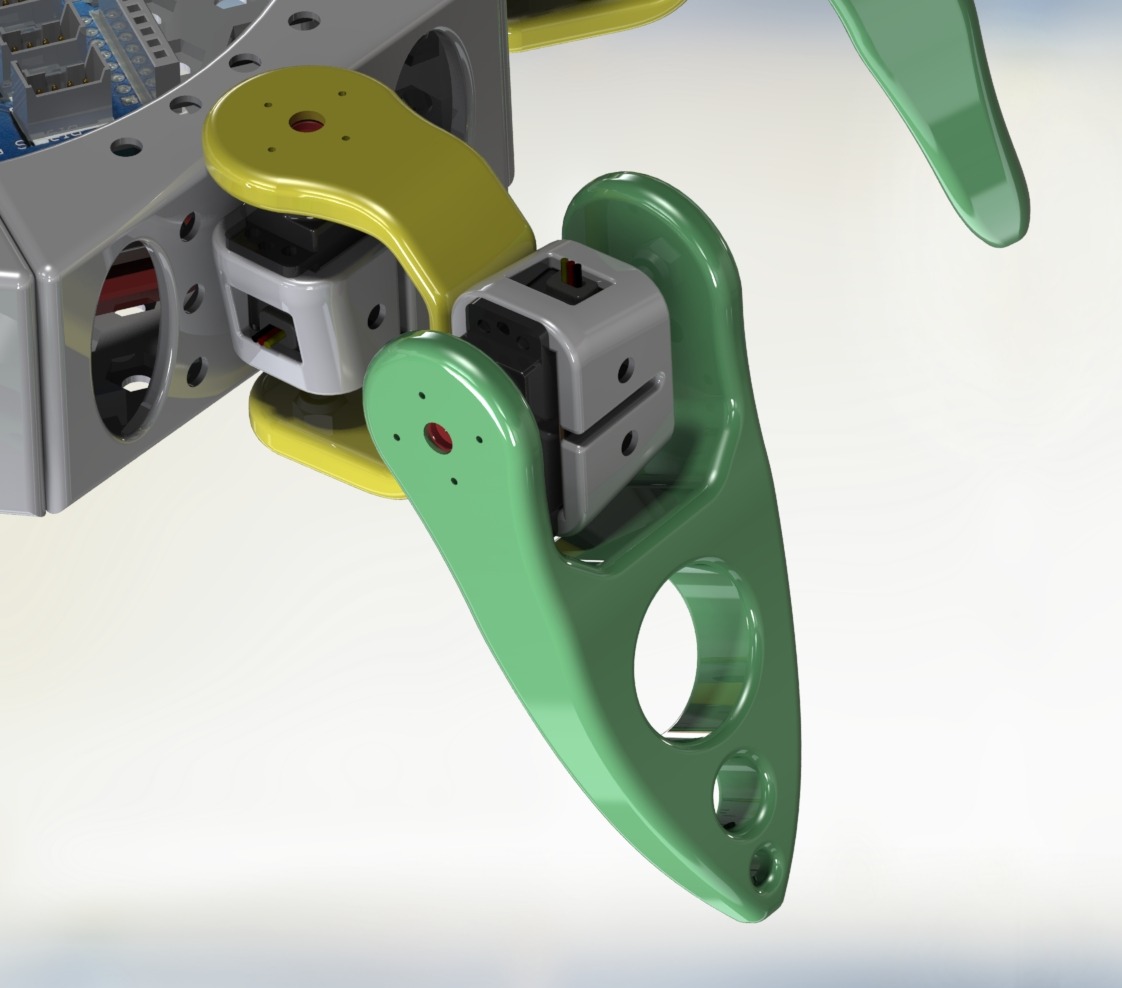
Vue éclatée de mini Spider S12 Version 1.00 – RedOhm
Vue de la patte et de son servomoteur – RedOhm –
Ensemble des fichiers à télécharger pour imprimer Spider version 1.00
–
Matériel utile :
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
- Alimentation: 4,8 à 6 Vcc
- Couple: 1,6 kg.cm à 4,8 Vcc
- Vitesse: 0,12 s/60° à 4,8 Vcc
- Dimensions: 24 x 12 x 29 mm
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
–
Retour au sommaire.
![]()
Vue éclatée de mini Spider S12-PC pour le choix des pièce et l’ensemble des fichiers à télécharger Version 09-02-2017 |
Spider version 09-02-2017 RedOhm – 001
Spider version 09-02-2017 RedOhm – 002
Spider version 09-02-2017 RedOhm – 003
–
Ensemble des fichiers à télécharger pour imprimer Spider Version 2.00
–
Matériel utile :
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
- Alimentation: 4,8 à 6 Vcc
- Couple: 1,6 kg.cm à 4,8 Vcc
- Vitesse: 0,12 s/60° à 4,8 Vcc
- Dimensions: 24 x 12 x 29 mm
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
.
![]()
Porte batterie et capot |
.


.
Ensemble des fichiers à télécharger pour imprimer le capot et le porte batterie
–
Retour au sommaireRepérage des numéros des servomoteurs
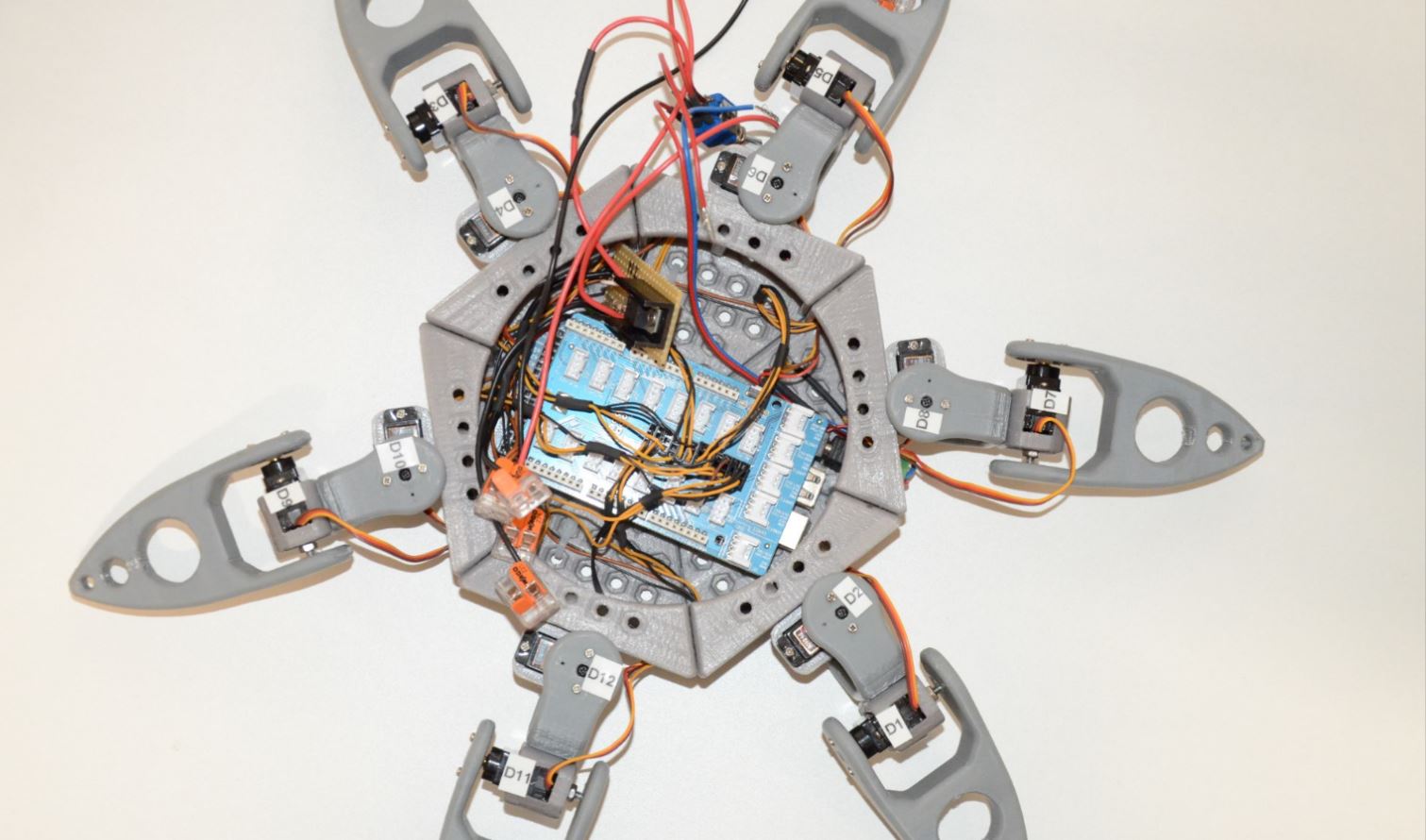
Robot Spider repérage RedOhm
–
Programme de calibrage des moteurs ( Positionnement a 90° du servomoteur )
Voici un petit programme pour Arduino permettant de positionner un servomoteur à 90°. Ce positionnement se produit quand on appuie sur le bouton poussoir , tant que celui-ci est sollicité le servomoteur conserve sa position, quand le bouton est relâché le servo est à nouveau libre.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 |
/* * RedOhm * * * Positionne un servomoteur à son centre * donc à 90° * * Le 06/12/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // le bouton est connecté à la broche 2 de la carte Arduino const int bouton=2; // Variable qui enregistre l'état du bouton int etatdubouton; /* * Un programme Arduino doit impérativement contenir cette fonction . * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { //le bouton est une entrée pinMode(bouton,INPUT); //on initialise l'état du bouton comme "relaché" etatdubouton=LOW; } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // lecture de l'etat du bouton etatdubouton=digitalRead(bouton); //test si le bouton a un niveau logique HAUT if (etatdubouton == HIGH) { // associe le servomoteur a la broche 3 monservo.attach(3); // Positionne mon servomteur a 90 monservo.write(90); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } else { // Dissocie la variable monservo de sa broche monservo.detach(); } } |
–
Retour au sommaire![]()
Programme d’initialisation de mini-spider et un petit bonjour
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 |
/* * * * RedOhm * * Initialisation de mini spider * * but : les pattes en bas et droite * enfin un petit bonjour pour nous confirmer * que le robot est en attente * * * Le 28/01/2017 * H-Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> //Crée un objet de type "Servo", nommé -> servo_d1 Servo servo_d1; //Crée un objet de type "Servo", nommé -> servo_d2 Servo servo_d2; //Crée un objet de type "Servo", nommé -> servo_d3 Servo servo_d3; //Crée un objet de type "Servo", nommé -> servo_d4 Servo servo_d4; //Crée un objet de type "Servo", nommé -> servo_d5 Servo servo_d5; //Crée un objet de type "Servo", nommé -> servo_d6 Servo servo_d6; //Crée un objet de type "Servo", nommé -> servo_d7 Servo servo_d7; //Crée un objet de type "Servo", nommé -> servo_d8 Servo servo_d8; //Crée un objet de type "Servo", nommé -> servo_d9 Servo servo_d9; //Crée un objet de type "Servo", nommé -> servo_d10 Servo servo_d10; //Crée un objet de type "Servo", nommé -> servo_d11 Servo servo_d11; //Crée un objet de type "Servo", nommé -> servo_d12 Servo servo_d12; // variable du type int pour les deplacement des servomoteurs // a droite int initd=5; // variable du type int pour les deplacement des servomoteurs // a gauche int initg=5; // variable du type int pour les boucle for int x; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // associe le servomoteur a la broche 2 servo_d1.attach(2,700,2000); // associe le servomoteur a la broche 3 servo_d2.attach(3,700,2000); // associe le servomoteur a la broche 4 servo_d3.attach(4,700,2000); // associe le servomoteur a la broche 5 servo_d4.attach(5,700,2000); // associe le servomoteur a la broche 6 servo_d5.attach(6,700,2000); // associe le servomoteur a la broche 7 servo_d6.attach(7,700,2000); //associe le servomoteur a la broche 8 servo_d7.attach(8,700,2000); //associe le servomoteur a la broche 9 servo_d8.attach(9,700,2000); //associe le servomoteur a la broche 10 servo_d9.attach(10,700,2000); //associe le servomoteur a la broche 11 servo_d10.attach(11,700,2000); //associe le servomoteur a la broche 12 servo_d11.attach(12,700,2000); //associe le servomoteur a la broche 13 servo_d12.attach(13,700,2000); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(500); // lancement d'un petit bonjour servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); delay(200); servo_d1.write (5); delay(500); servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); servo_d1.write (5); } // fin du bonjour //Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { } // Initialisation spider void initialisation() { // position des pattes en bas initd=5; initg=175; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); } |
Retour au sommaire
.
![]()
Programme enchaînement de divers sous programme 002
- Initialisation spider
- Petit bonjour
- Position d’attaque de Spider
- Rotation de Spider
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 |
/* * * * RedOhm * * Programme enchaînement de divers sous programme * * Initialisation spider * Petit bonjour * Position d'attaque de Spider * Rotation de Spider * * Le 18/02/2017 * H-Mazelin * */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> //Crée un objet de type "Servo", nommé -> servo_d1 Servo servo_d1; //Crée un objet de type "Servo", nommé -> servo_d2 Servo servo_d2; //Crée un objet de type "Servo", nommé -> servo_d3 Servo servo_d3; //Crée un objet de type "Servo", nommé -> servo_d4 Servo servo_d4; //Crée un objet de type "Servo", nommé -> servo_d5 Servo servo_d5; //Crée un objet de type "Servo", nommé -> servo_d6 Servo servo_d6; //Crée un objet de type "Servo", nommé -> servo_d7 Servo servo_d7; //Crée un objet de type "Servo", nommé -> servo_d8 Servo servo_d8; //Crée un objet de type "Servo", nommé -> servo_d9 Servo servo_d9; //Crée un objet de type "Servo", nommé -> servo_d10 Servo servo_d10; //Crée un objet de type "Servo", nommé -> servo_d11 Servo servo_d11; //Crée un objet de type "Servo", nommé -> servo_d12 Servo servo_d12; // variable du type int pour les deplacement des servomoteurs // a droite int initd=5; // variable du type int pour les deplacement des servomoteurs // a gauche int initg=5; // variable du type int pour les boucle for int x; // variable du type int pour le deplacement arriere int arriere =90; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // associe le servomoteur a la broche 2 servo_d1.attach(2,700,2000); // associe le servomoteur a la broche 3 servo_d2.attach(3,700,2000); // associe le servomoteur a la broche 4 servo_d3.attach(4,700,2000); // associe le servomoteur a la broche 5 servo_d4.attach(5,700,2000); // associe le servomoteur a la broche 6 servo_d5.attach(6,700,2000); // associe le servomoteur a la broche 7 servo_d6.attach(7,700,2000); //associe le servomoteur a la broche 8 servo_d7.attach(8,700,2000); //associe le servomoteur a la broche 9 servo_d8.attach(9,700,2000); //associe le servomoteur a la broche 10 servo_d9.attach(10,700,2000); //associe le servomoteur a la broche 11 servo_d10.attach(11,700,2000); //associe le servomoteur a la broche 12 servo_d11.attach(12,700,2000); //associe le servomoteur a la broche 13 servo_d12.attach(13,700,2000); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(1500); } //Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // appel du sous programme un petit bonjour petit_bonjour(); // temporisation delay(500); // appel du sous programme attaque attaque_spider(); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(500); // temporisation delay(2000); // realisation de 5 pas de rotation for (x=0;x<5;x++){ // appel du sous programme rotation rotation_spider(); delay(300); } } /* * ============================================= * * ensemble de sous programme * * ============================================= */ // Initialisation spider void initialisation() { // position des pattes en bas initd=5; initg=175; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); } //========== sous programme petit bonjour ========== void petit_bonjour() { servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); delay(200); servo_d1.write (5); delay(500); servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); servo_d1.write (5); } //==================fin du bonjour ====================== //========= position d'attaque de Spider ================ void attaque_spider() { initd=55; initg=125; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); delay(1000); servo_d8.write (40); servo_d10.write (140); delay(1000); initd=175; servo_d1.write (initd); servo_d11.write (initd); delay(1000); for (x=0;x<5;x++){ initd=135; servo_d1.write (initd); servo_d11.write (initd); delay(300); initd=175; servo_d1.write (initd); servo_d11.write (initd); delay(300); } } //====== position d'attaque de Spider ======= void rotation_spider() { //===== rotation de spider ================== //patte 1 servo_d1.write (25); delay (200); servo_d2.write (50); delay (200); servo_d1.write (5); delay (200); //patte 2 servo_d11.write (25); delay (200); servo_d12.write (50); delay (200); servo_d11.write (5); delay (200); //patte3 servo_d9.write (25); delay (200); servo_d10.write (50); delay (200); servo_d9.write (5); delay (200); //patte4 servo_d3.write (150); delay (200); servo_d4.write (50); delay (200); servo_d3.write (175); delay (200); //patte 5 servo_d5.write (150); delay (200); servo_d6.write (50); delay (200); servo_d5.write (175); delay (200); //patte6 servo_d7.write (150); delay (200); servo_d8.write (50); delay (200); servo_d7.write (175); delay (200); // position des pattes en arriere arriere=130; // position des pattes au centre servo_d2.write (arriere); servo_d4.write (arriere); servo_d6.write (arriere); servo_d8.write (arriere); servo_d10.write (arriere); servo_d12.write (arriere); delay(500); } //=====Fin de rotation de spider ===================== |
–
![]()
Présentation de Mr le régulateur 7806 en boitier TO220
La série de régulateurs à trois broches LM78XX est disponible dans de nombreuses valeurs de tensions de sortie fixes et est très utile dans nombre d’applications. Bien que conçus pour fournir des tensions de sortie fixes, ces circuits peuvent également délivrer des tensions et courants réglables à l’aide de quelques composants extérieurs
La série LM78XX est disponible en boîtier aluminium TO-220 et peut délivrer jusqu’à 1 A si on utilise un refroidisseur approprié. Ce boîtier possède une limitation en courant interne pour ne pas dépasser les limites de sécurité en courant de pointe. Une plage de sécurité est prévue pour le transistor de sortie permettant de limiter la puissance interne dissipée. Si celle-ci devient trop importante pour le refroidisseur utilisé, le circuit de disjonction thermique est activé pour éviter une surchauffe du circuit intégré.
_
Retour au sommaire
.
Fichier STL disponible sur cette page
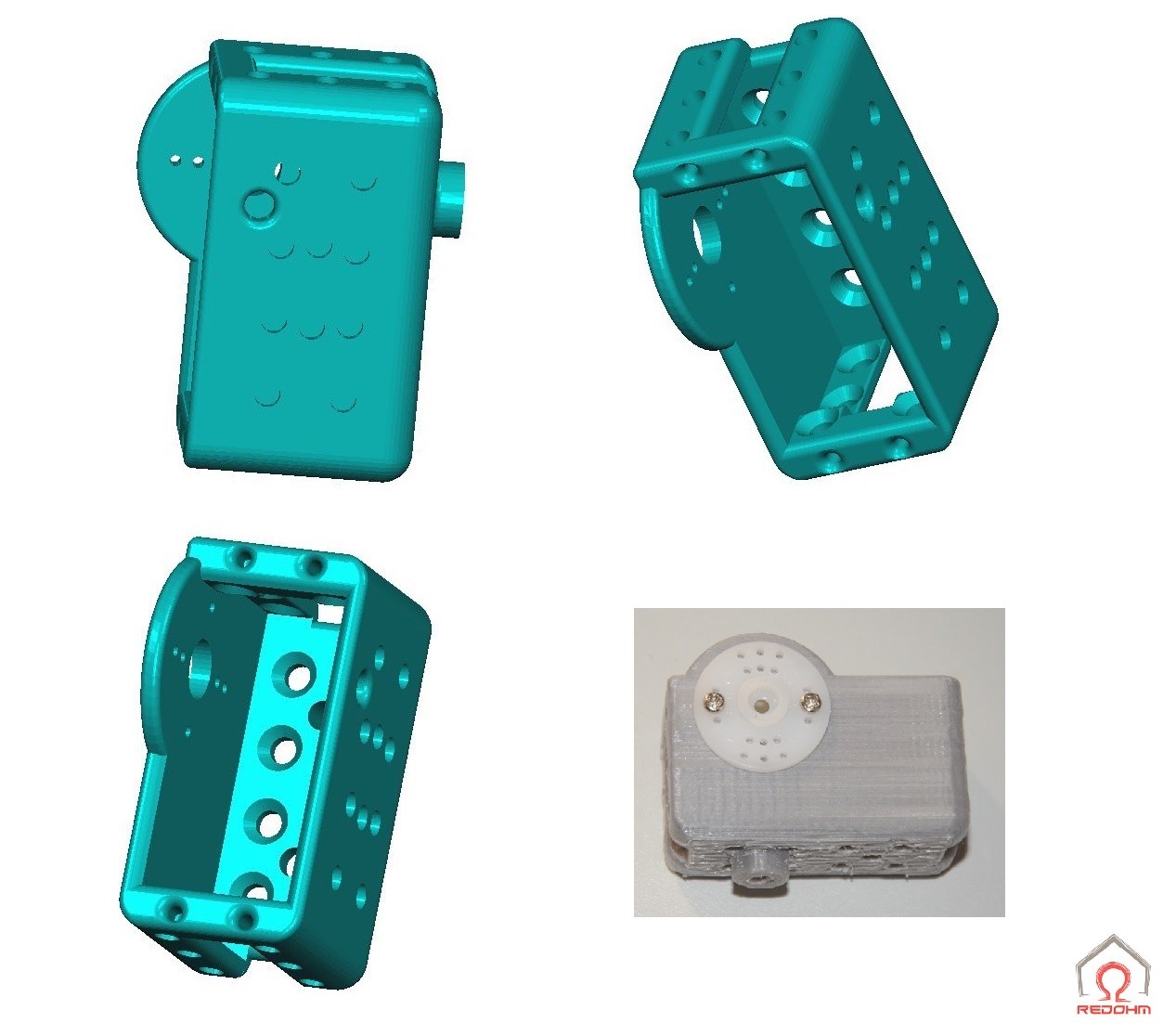
Cage support servomoteur ( servo bas avec paramètre )
Cage support servomoteur ( servo bas )
.
Pour tout probléme |
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour à la page principal
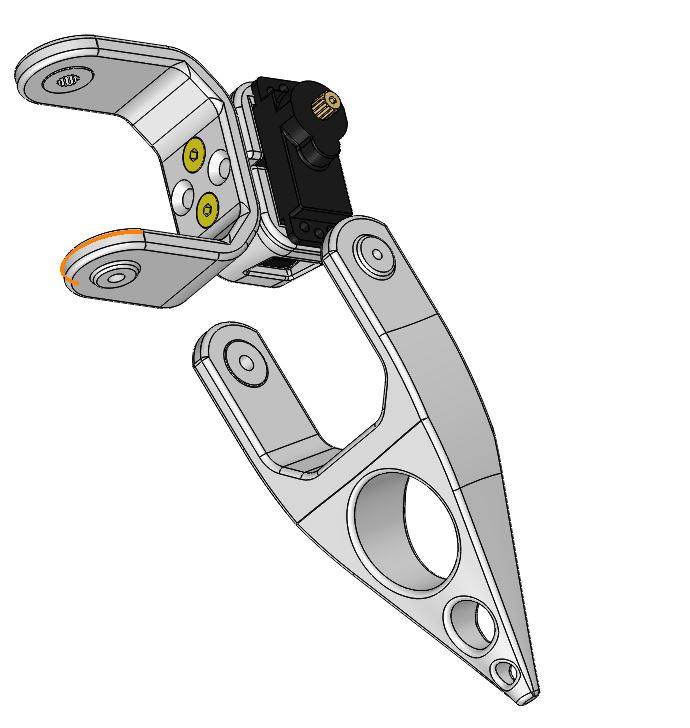
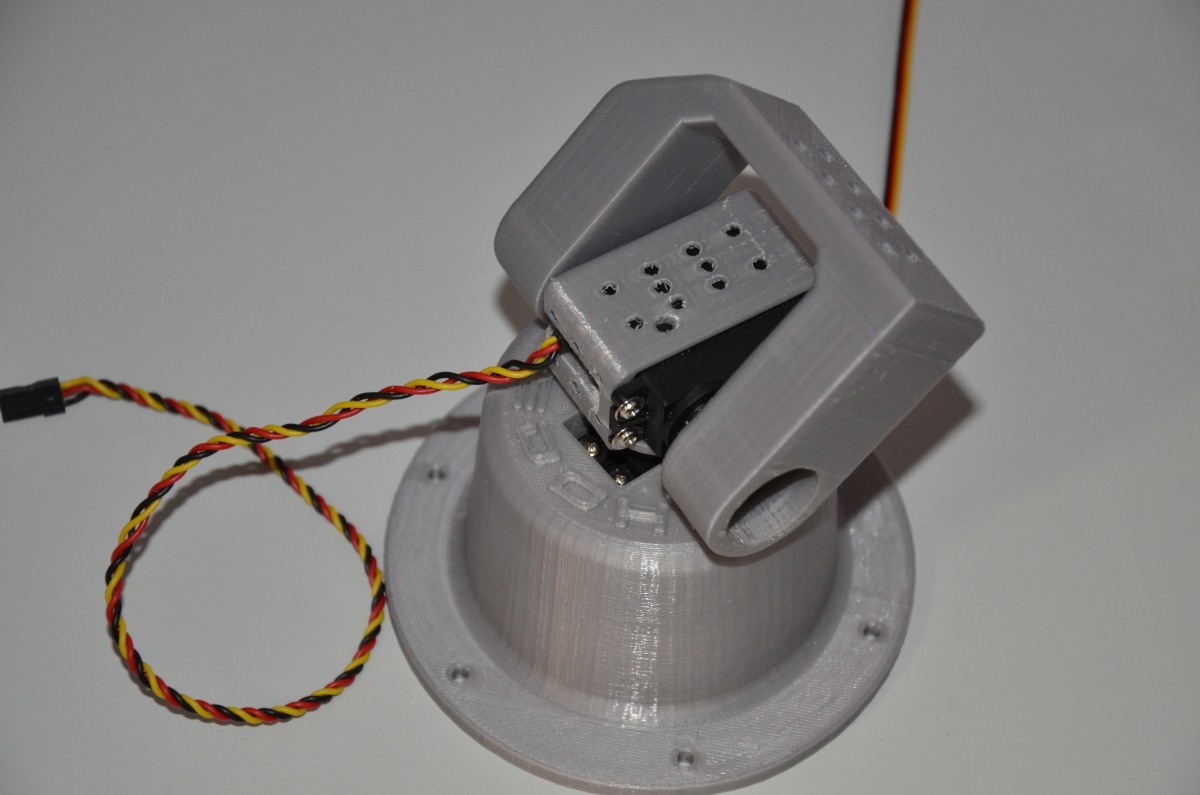
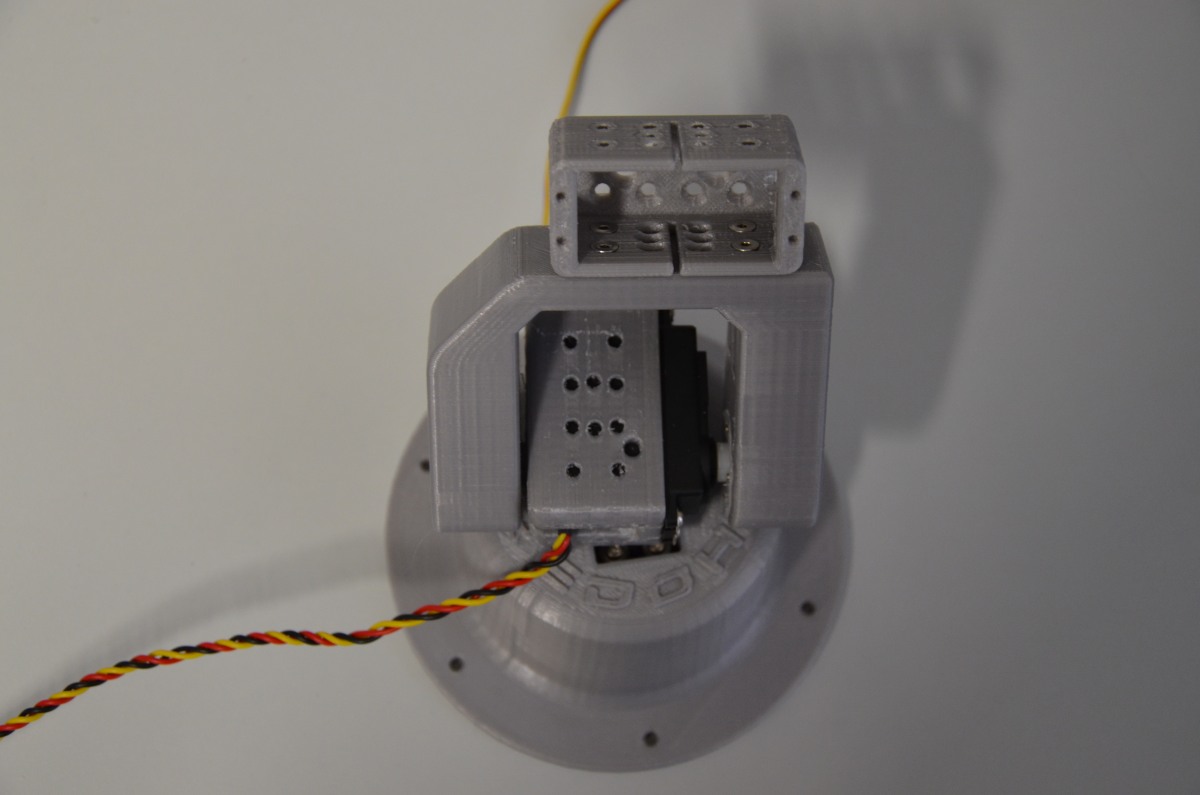
Mise à jour le 20/09/2019 : C’est un support trois axes qui pourrait utiliser pour différentes réalisations. L’ensemble de ce projet a été réalisé pour que certaines pièces comme les cages des servomoteurs soient réutilisé dans d’autres applications.
Sommaire :
- Présentation du projet .
- Tutoriel de montage en photo .
- Montage du servomoteur dans la base .
- Montage du Palonnier type roue sur la cage .
- Assemblage de la cage sur le servomoteur de la base .
- Montage du servo porte bras .
- Assemblage du bras .
- Assemblage de la partie haute.
- Ensemble des fichiers pour l’impression 3D.
- Base du support 3 axes.
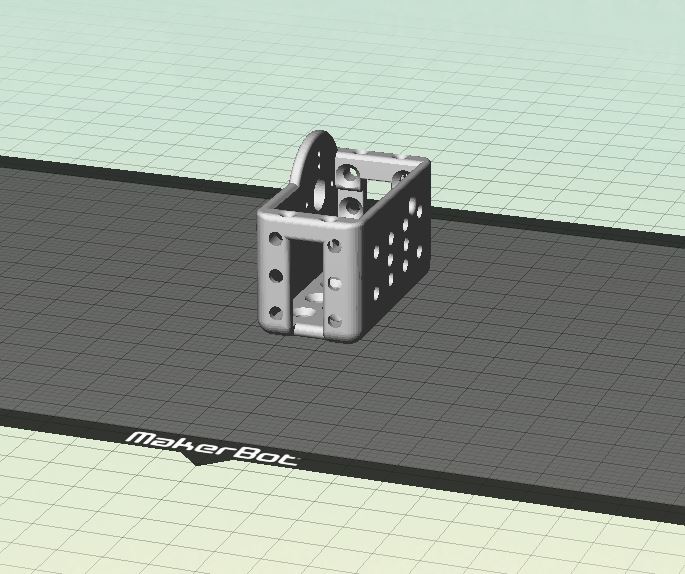
- Cage support pour servomoteur partie bas .
- Bras du support 3 axes
- Cage pour servomoteur partie haute
- Support supérieure
- Programme pour tester les limites mini et maxi du support 3 axes
- Schéma de branchement de l’ensembles des actionneurs et potentiomètre .
- Montage avec une carte Arduino Mega 2560.
- Liste du matériel câblage classique .
- Liste du matériel avec utilisation du matériel Grove
- Schéma électrique de principe
- Exemple de programme sur Arduino Mega
- Montage avec une carte Arduino Uno ( en cours )
- Montage avec une carte Arduino Mega 2560.
- Retour au menu nos robots
![]()
Présentation du projet . |
.
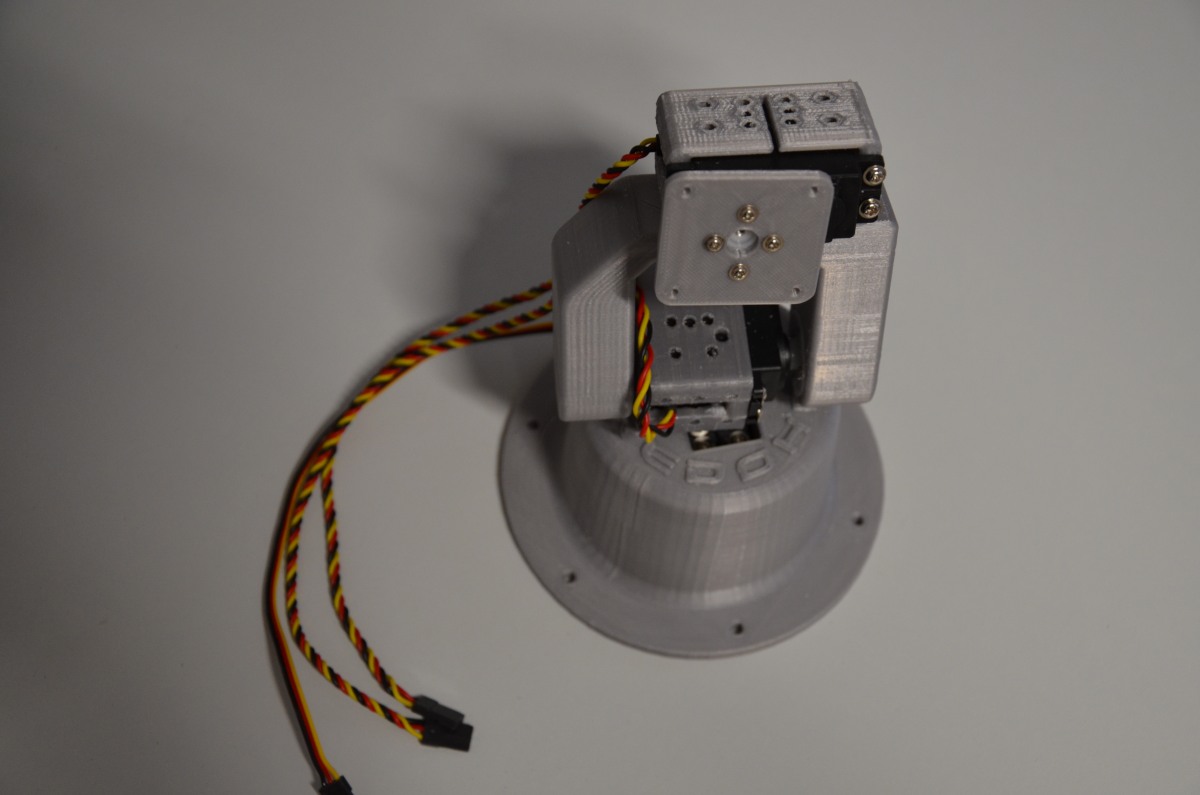
Vue
C’est un support trois axes qui pourrait utiliser pour différentes réalisations. L’ensemble de ce projet a été réalisé pour que certaines pièces comme les cages des servomoteurs soient réutilisé dans d’autres applications.
Retour au sommaire.
![]()
Tutoriel de montage en photo .
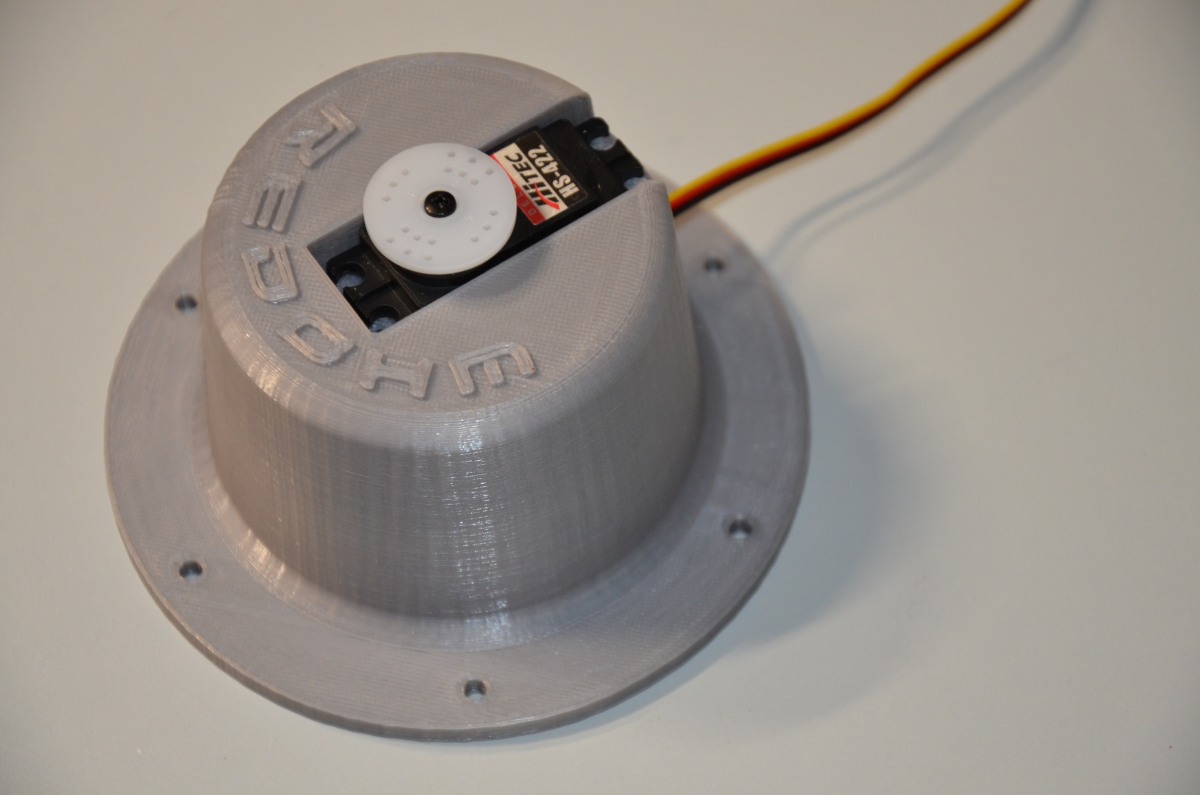
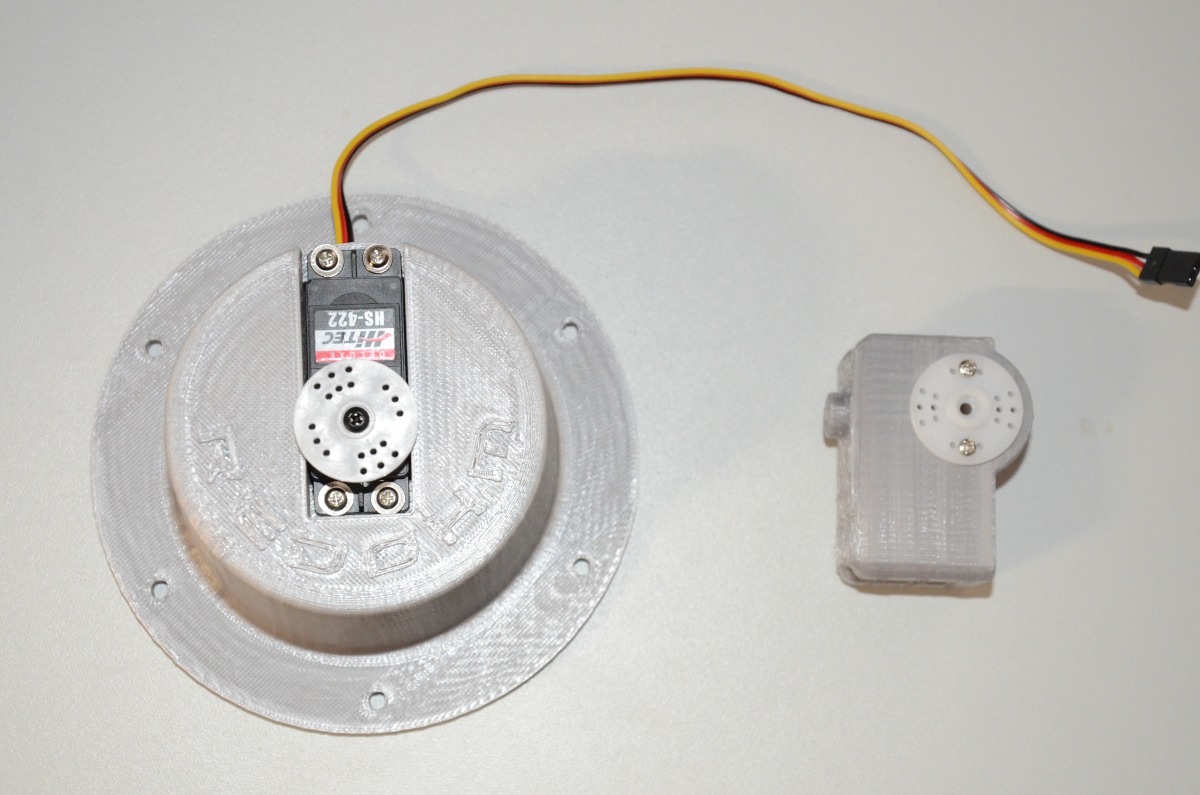
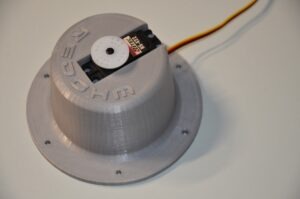
1: Montage du servomoteur HS-422 dans sa base .
Nous pouvons aussi utiliser le servomoteur Hitec HS-645 MG en sachant que les 2 servo ne possèdent pas le même couple . Nous avons un couple de 4.7kg.cm pour le HS-422 et de 9.6kg.cm pour le HS-645 MG .
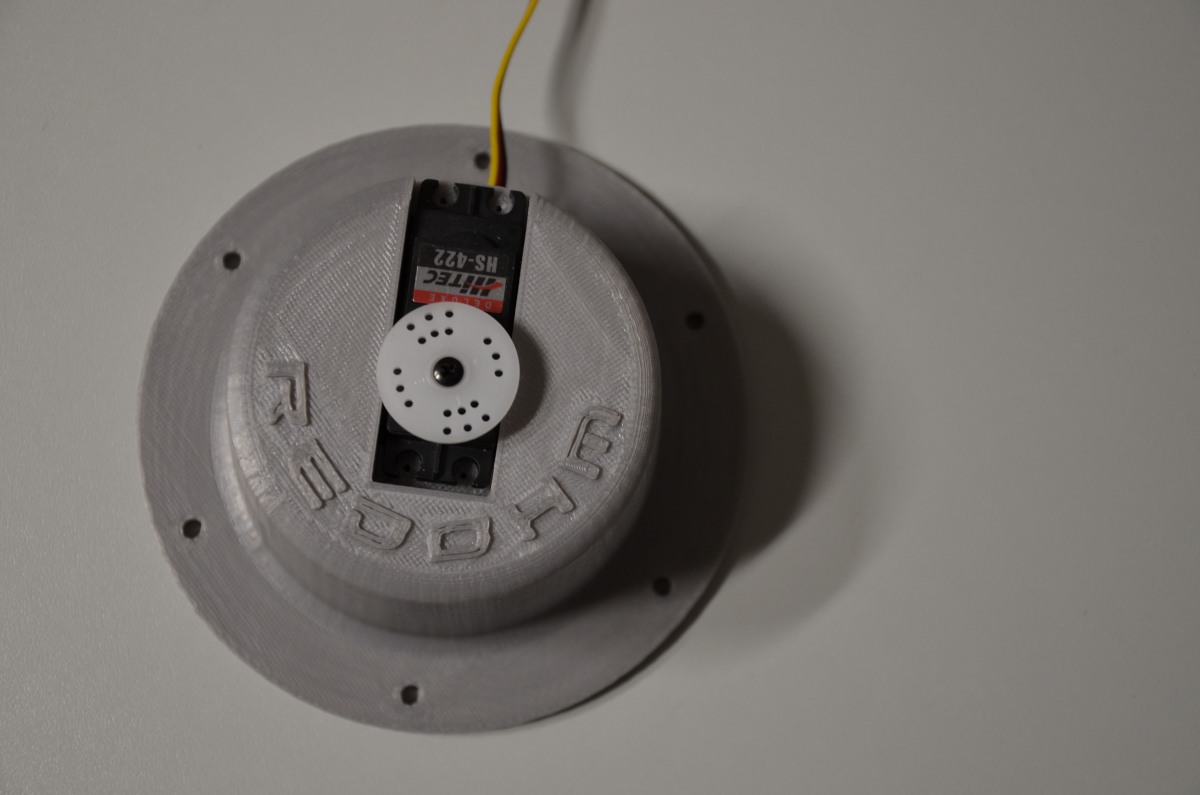
Montage du servomoteur HS-422 dans sa base
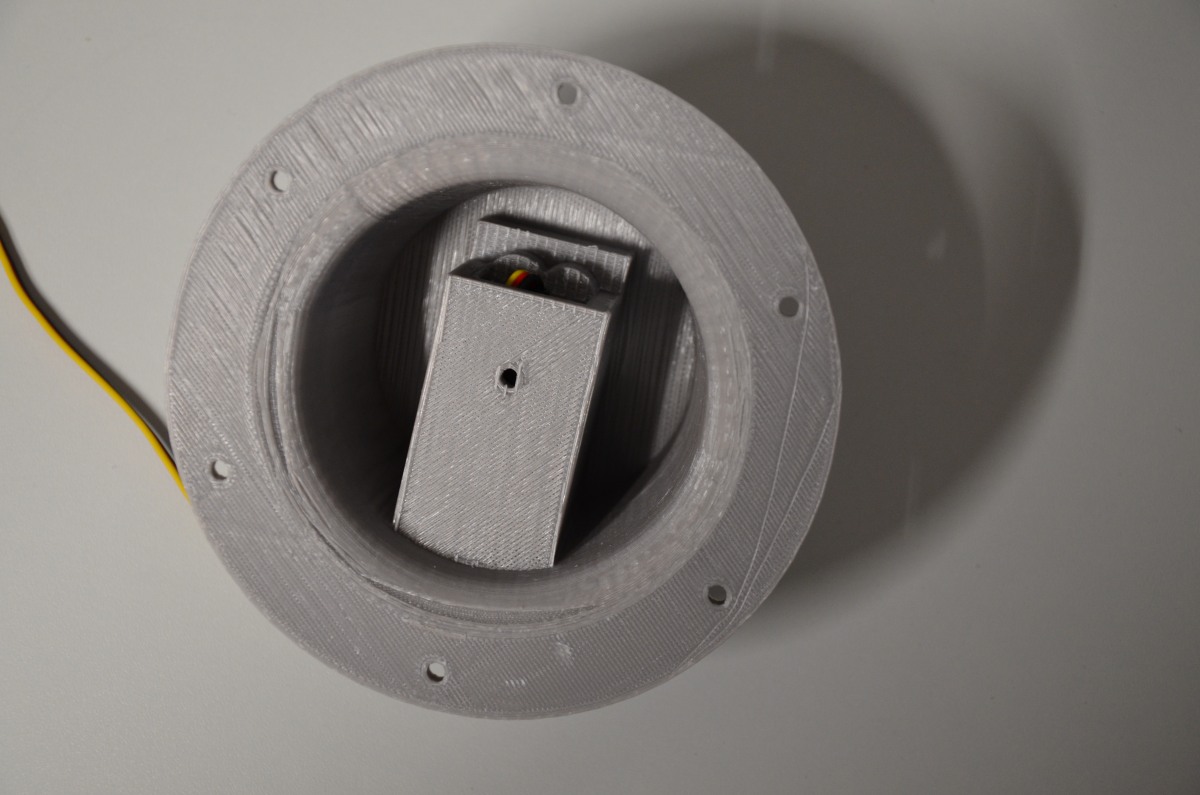
Montage du servomoteur HS-422 dans sa base (fig 2)
Montage du servomoteur HS-422 dans sa base (fig 3)
| Retour au sommaire |
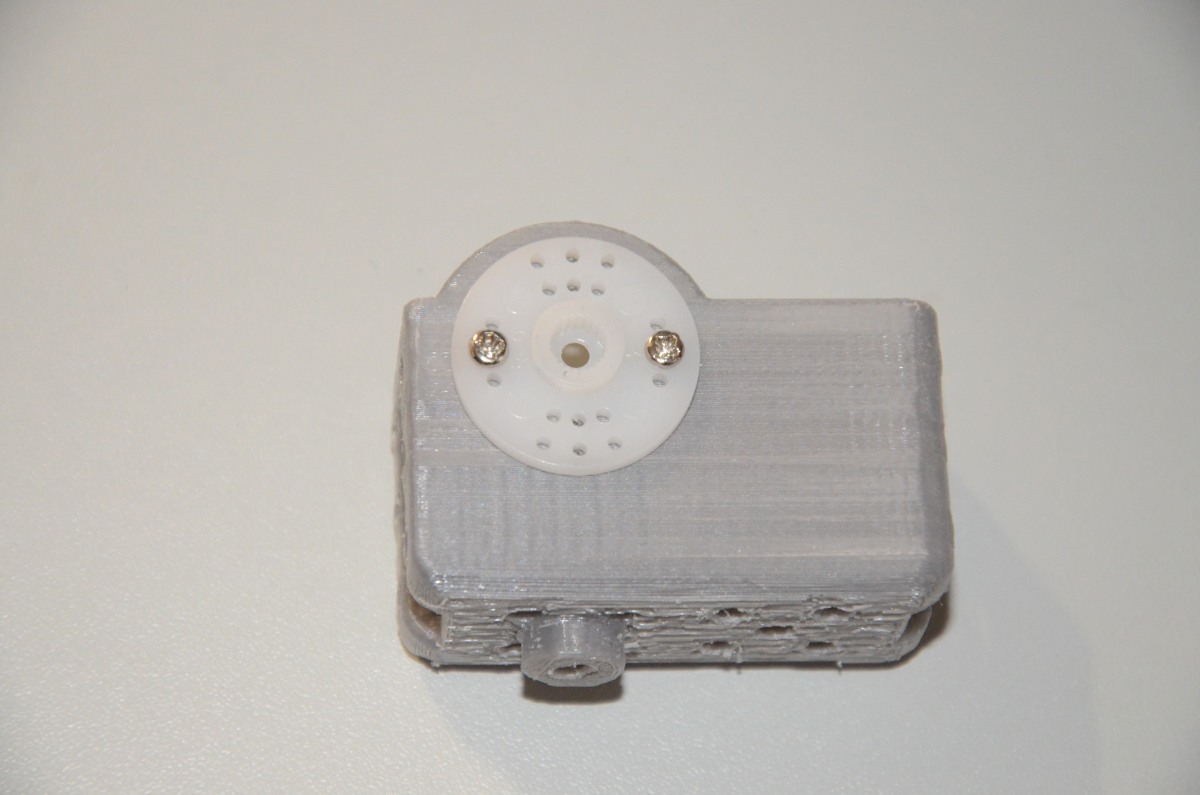
2:Montage du Palonnier type roue sur la cage support du servomoteur ( en général ce type de palonnier est vendu avec son servo ) .
RedOhm : Montage du palonnier
| Retour au sommaire |
3:Assemblage de la cage sur le servomoteur de la base .
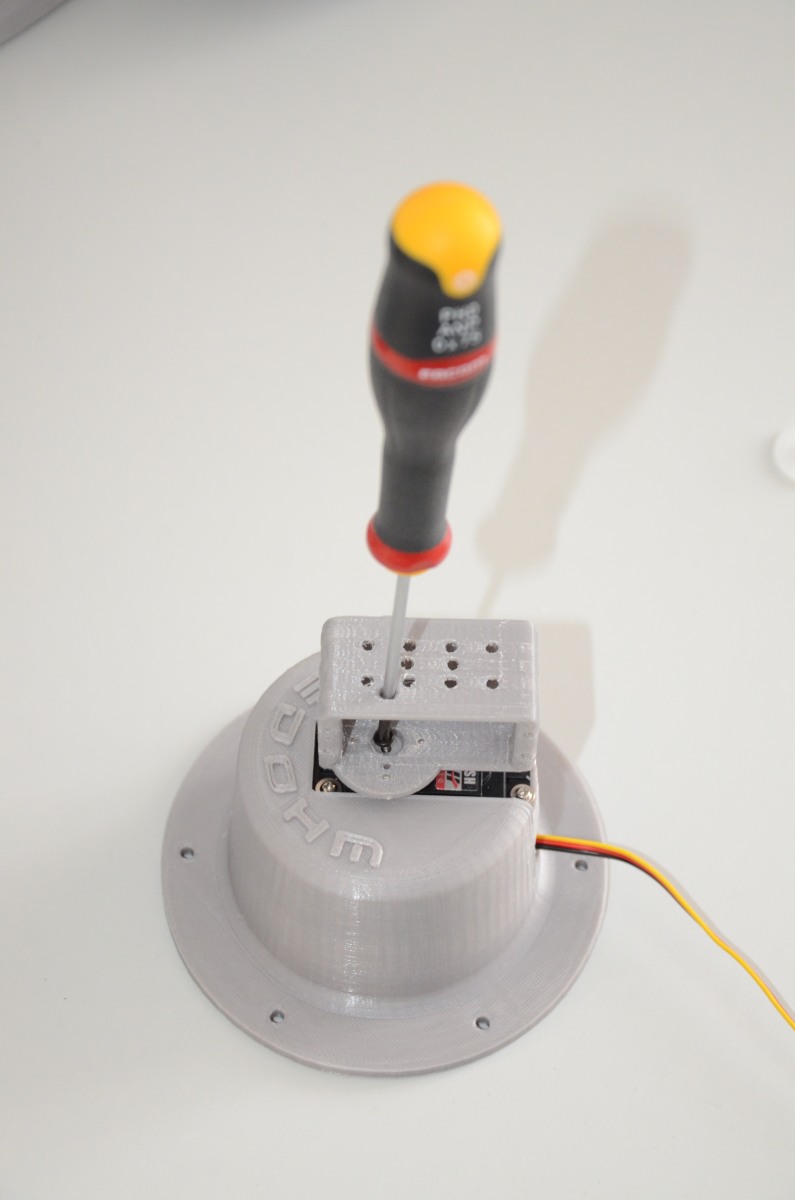
Redohm : On passe un petit tournevis dans l’orifice de la cage porte servo prévu pour ce type de montage
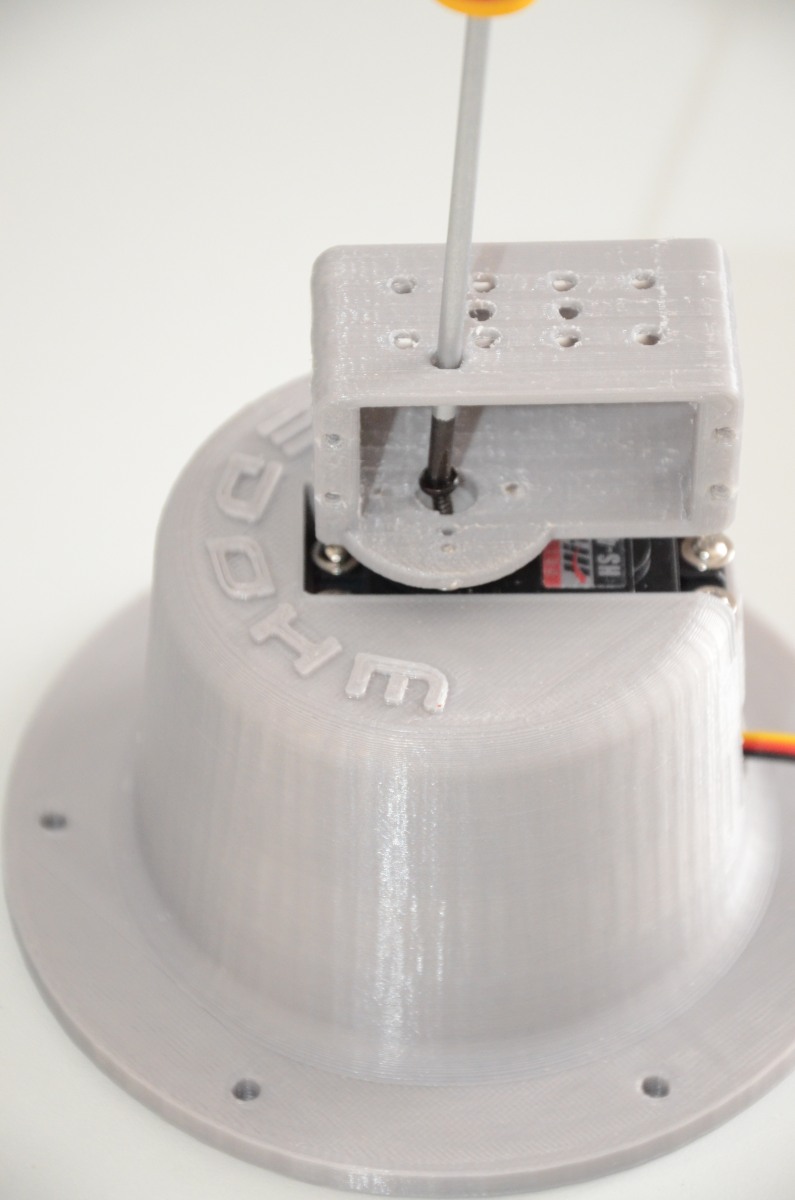
Redohm : Vue en gros plan
| Retour au sommaire |
4:Montage du servo porte bras .

Redohm : Montage du servo porte bras
| Retour au sommaire |
5:Assemblage du bras et montage du Palonnier type roue dans le bras ( en général ce type de palonnier est vendu avec son servo ) .
Redohm : Vue du bras fig.10

Redohm : Vue du bras fig.11
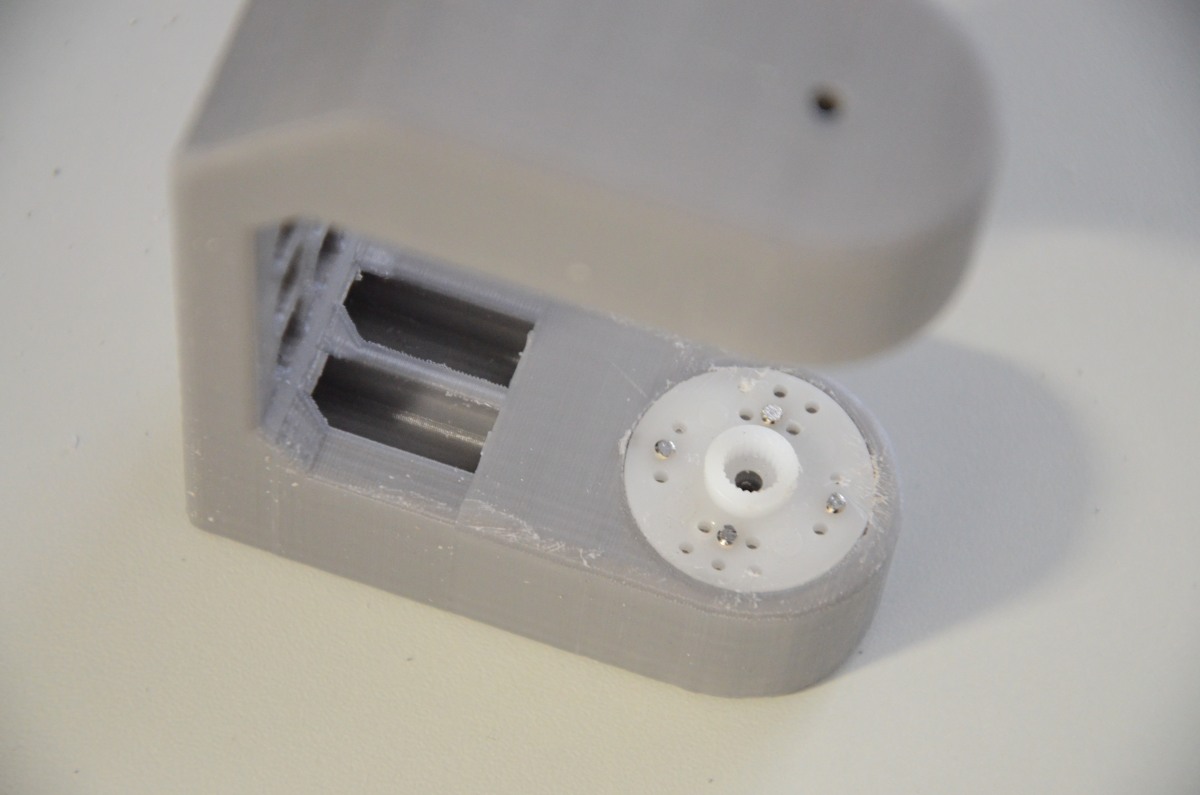
RedOhm : Montage du palonnier fig.20
RedOhm : Montage du palonnier fig.21
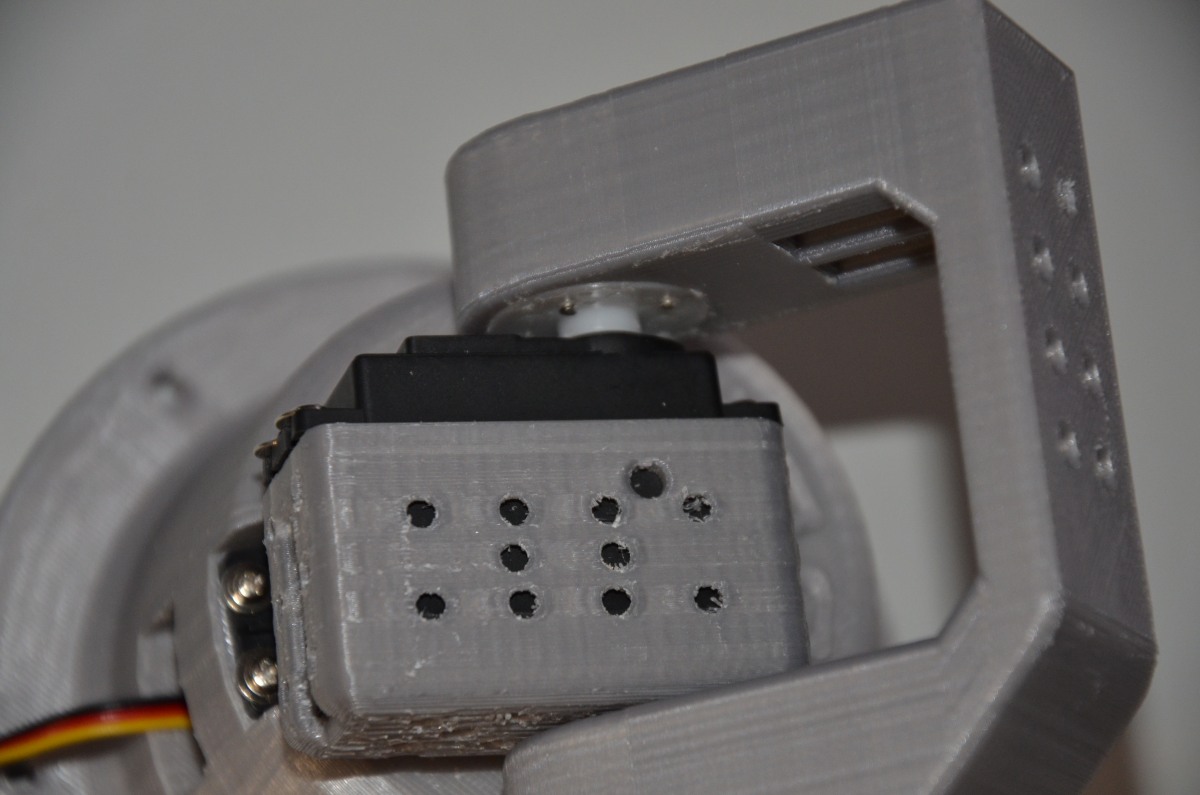
Redohm: Montage de l’ensemble fig.22
Redohm:Vue d’ensemble fig.23
| Retour au sommaire |
6:Assemblage de la partie haute .
Redohm:Support haut fig.60
Redohm: Support servomoteur superieur fig.61
Redohm : Vue d’ensemble fig.62
Redohm : Vue d’ensemble avec servomoteur et support fig.63
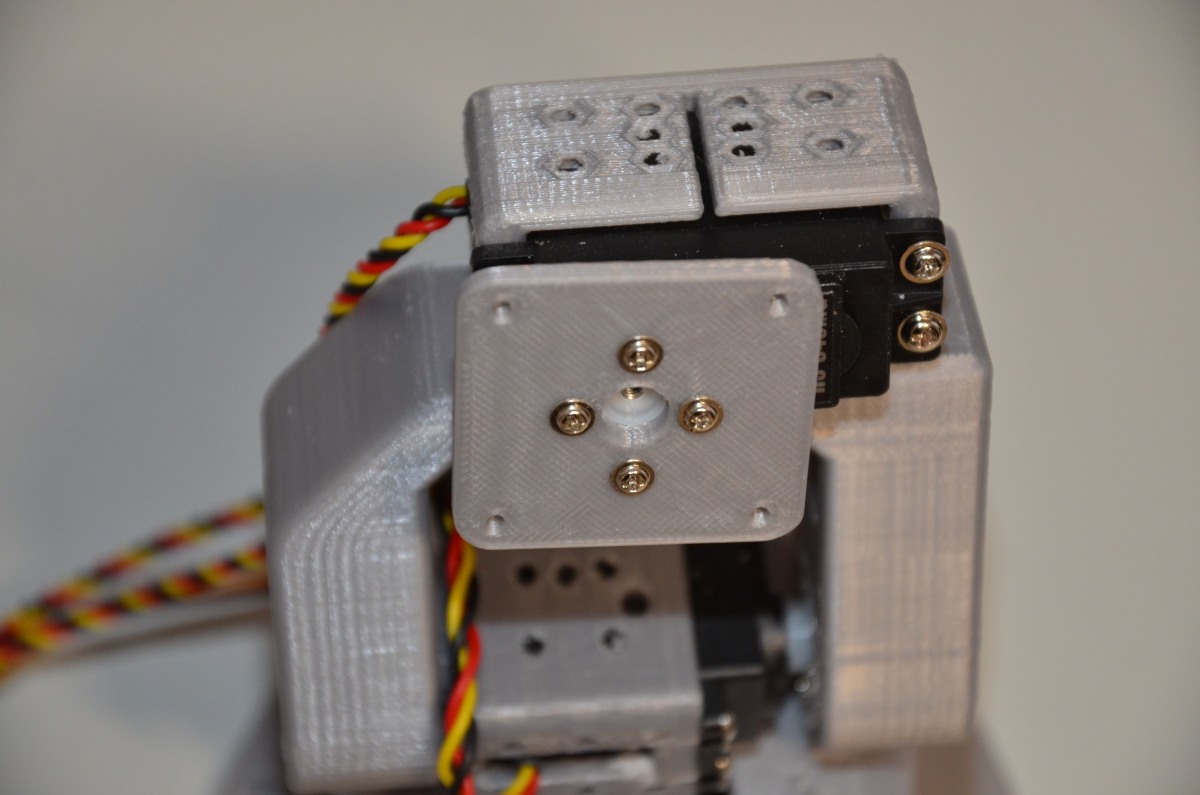
Redohm : Vue d’ensemble avec servomoteur et support fig.64
| Retour au sommaire |
![]()
Ensemble des fichiers pour l’impression 3D. |
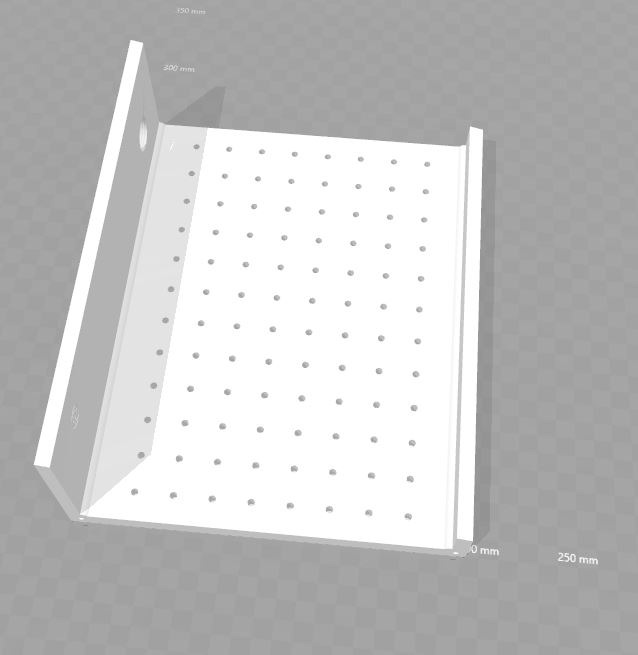
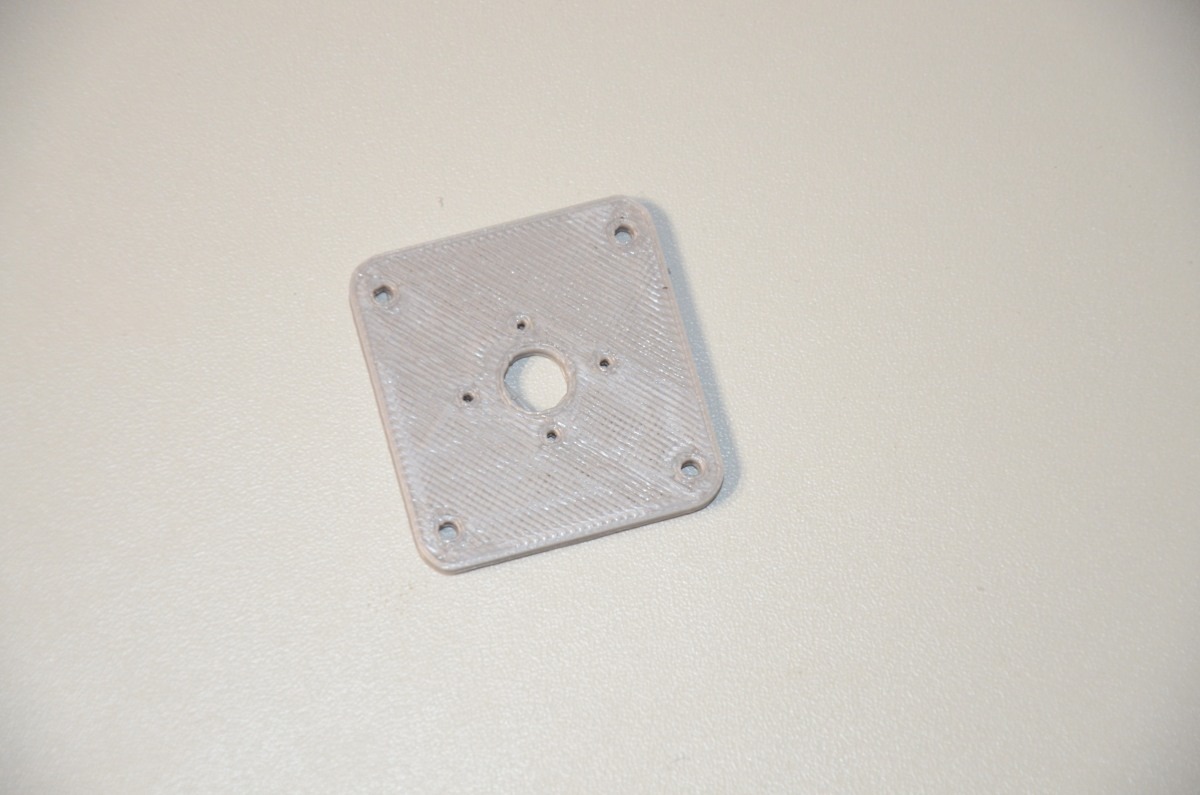
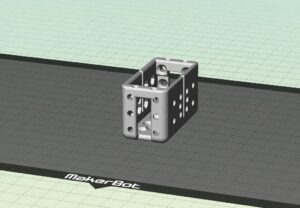
Piece 001 : Base du support 3 axes
Piece 001 : Base pour support 3 axes
Temps d’impression pour un remplissage de 30% ⇒ 7h21mm
Matière : PLA 120.01g
Résolution : 0.2mm
Télechargement de : Piece 001-Base du support 3 axes
Retour au sommaire
.
![]()
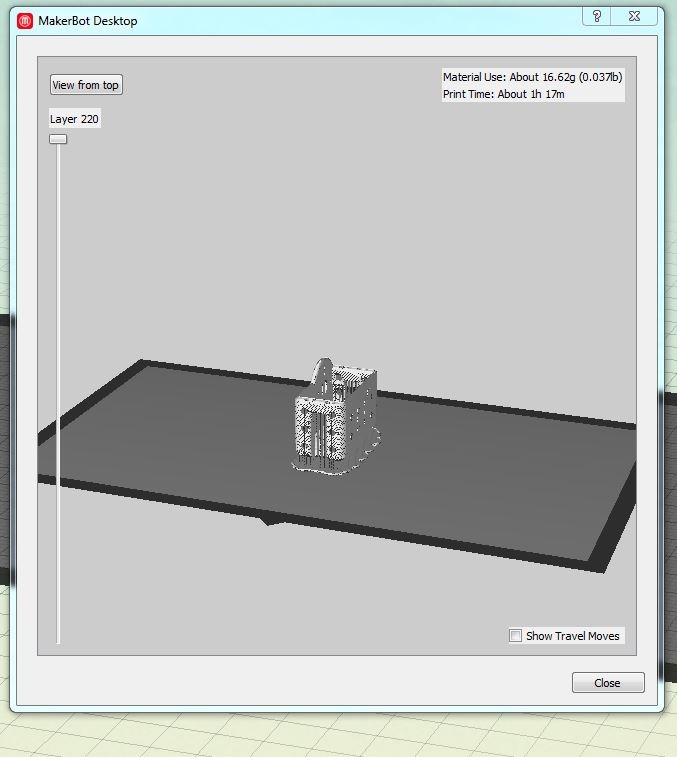
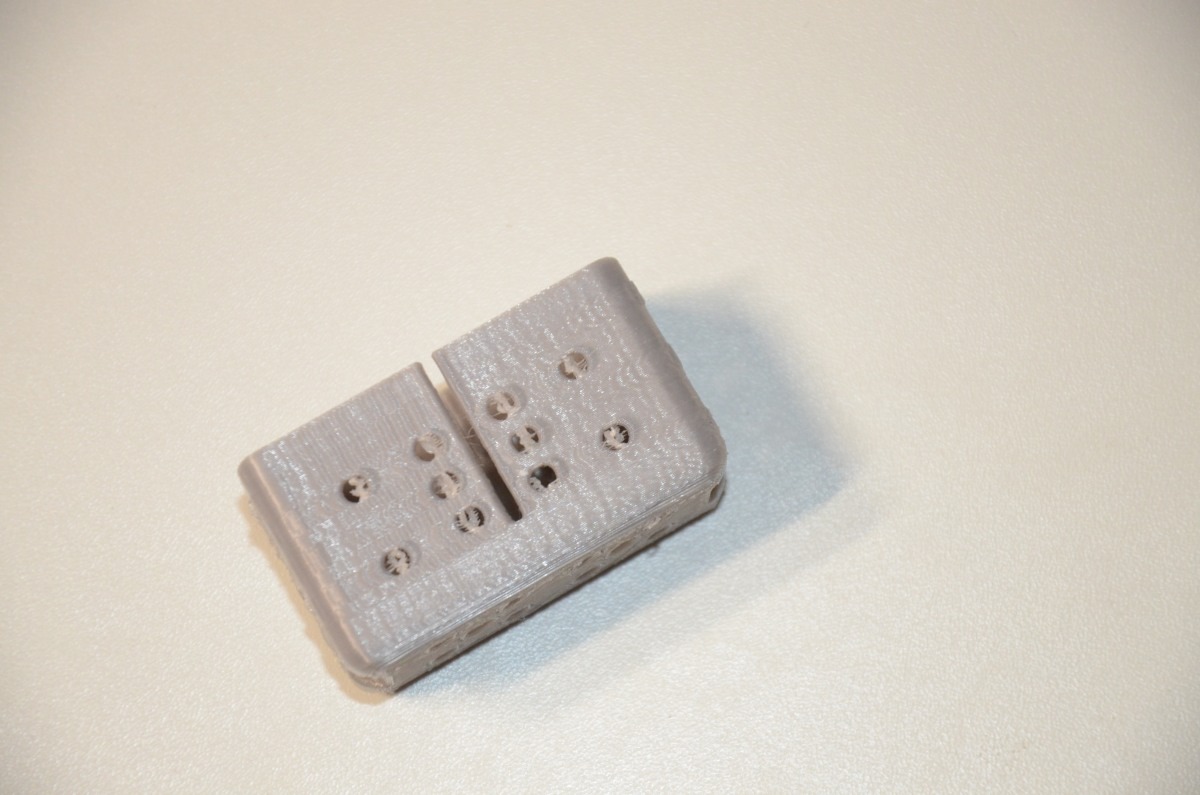
Piece 002 : Cage support servomoteur partie bras

Piece 002 : Cage support servomoteur partie bras
.
Temps d’impression pour un remplissage de 30% ⇒ 1h17mm.
Matière : PLA 16.62g (0.037lb)
Résolution : 0.2mm
.
![]()
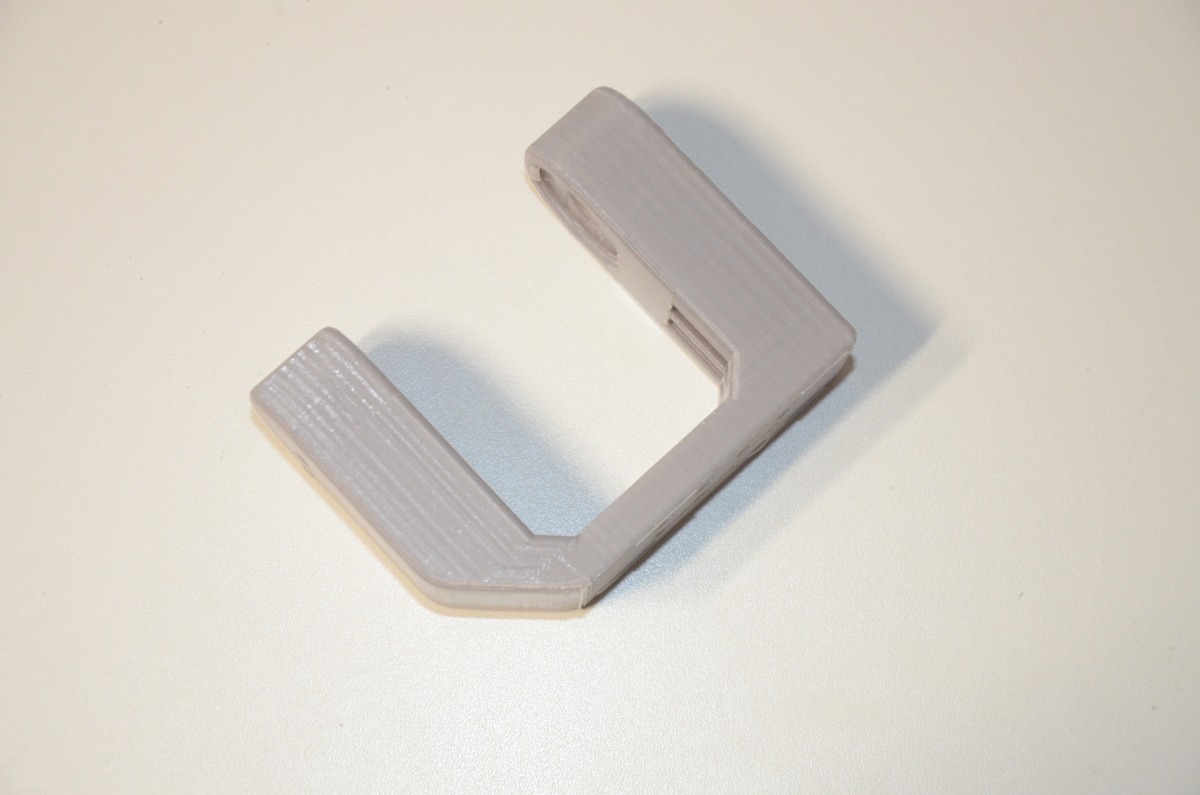
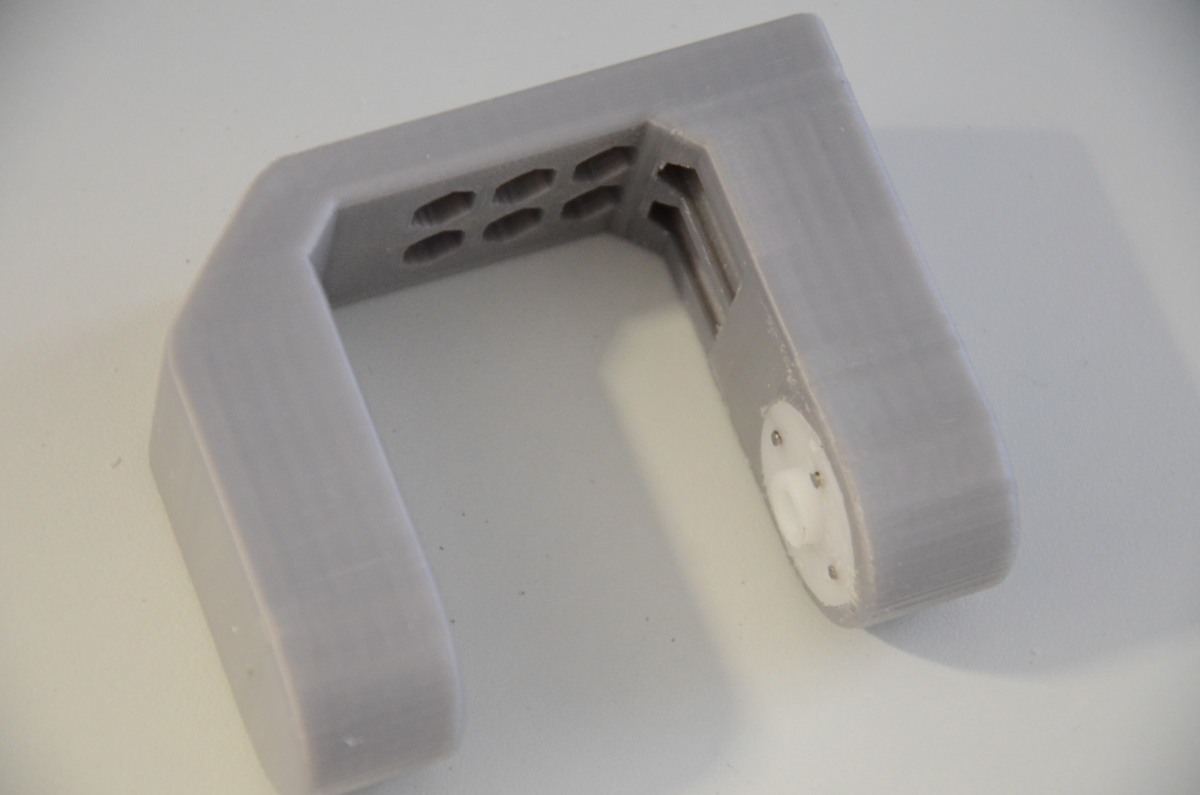
Piece 003 : Bras du support 3 axes

Bras pour support 3 axes
Temps d’impression pour un remplissage de 30% ⇒ 2h57mm
Matière : PLA 46.54g (0.103lb)
Résolution : 0.2mm
.
Télechargement de : Pieces 003-Bras pour support 3 axes Retour au sommaire
.
![]()
Piece 004 : Cage pour servomoteur partie haute
Piece 004 – Cage pour servomoteur partie haute
.
Temps d’impression pour un remplissage de 30% ⇒ 1h06mm
Matière : PLA 14.43g (0.023lb)
Résolution : 0.2mm
.
Télechargement de : Piece 004-Cage servomoteur partie haute.
Retour au sommaire![]()
Piece 005 : Support supérieure
Piece 005- Support supérieure fig 005.1
.
Temps d’impression pour un remplissage de 30% ⇒ 00h21mm
Matière : PLA 6.64g (0.015lb)
Résolution : 0.2mm
.
Télechargement de : Piece 005-Support supérieure.
Retour au sommaire![]()
Programme pour tester les limites mini et maxi du support 3 axes |
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 |
// // // /* * RedOhm * * * Essai et reglage des servomoteurs a l'aide * d'un potentiometre en vue de determiner les * limites min et max * * Le 27/08/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // broche sur lequel est branche le potentiometre int brochepotar_de_position=2; // variable contenant la valeur de la potentiometre int valeur_potar_position; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { Serial.begin(9600); // associe le servomoteur a la broche 3 monservo.attach(3); } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position=analogRead( brochepotar_de_position); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position=map(valeur_potar_position,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle monservo.write(valeur_potar_position); Serial.println(valeur_potar_position); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } |
.
Schéma de branchement de l’ensembles des actionneurs et potentiomètre .
1:Montage avec une carte Arduino Mega 2560
a) Liste du materiel pour câblage classique.
- 3 potentiomètre de 10kΩ
- 3 servomoteurs Hitec référence HS-645MG ou Hitec HS422
- 1 carte Arduino Mega 2560
- 1 alimentation variable régler a 6 Volt ou une alimentation fixe 6V
- 1 Alimentation pour la carte micro ( alimentation de 7 à 12 V sur connecteur alim = vin tension positive en entrée ne pas oublier la masse à brancher sur la pin Gnd ).Si on utilise plus de 12V, le régulateur de tension de la carte pourrait chauffer et en cascade détruire la carte )
b) Liste du matériel avec utilisation du matériel Grove :
- 1 Module Grove Mega Shield V1.2 référence -> 103020027 .Le module Grove Base Shield est une carte d’interface permettant de raccorder facilement, rapidement et sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino.
- 3 Potentiomètre à glissière Grove 101020036 ou potentiomètre rotatif Grove 101020048
- 3 servomoteurs Hitec référence HS-645MG ou Hitec HS422
- 1 carte Arduino Mega 2560
- 1 alimentation variable régler a 6 Volt ou une alimentation fixe 6V
- 1 Alimentation pour la carte micro ( alimentation de 7 à 12 V sur connecteur alim = vin tension positive en entrée ne pas oublier la masse à brancher sur la pin Gnd ) .Si on utilise plus de 12V, le régulateur de tension de la carte pourrait chauffer et en cascade détruire la carte )
c) Schéma électrique de principe.
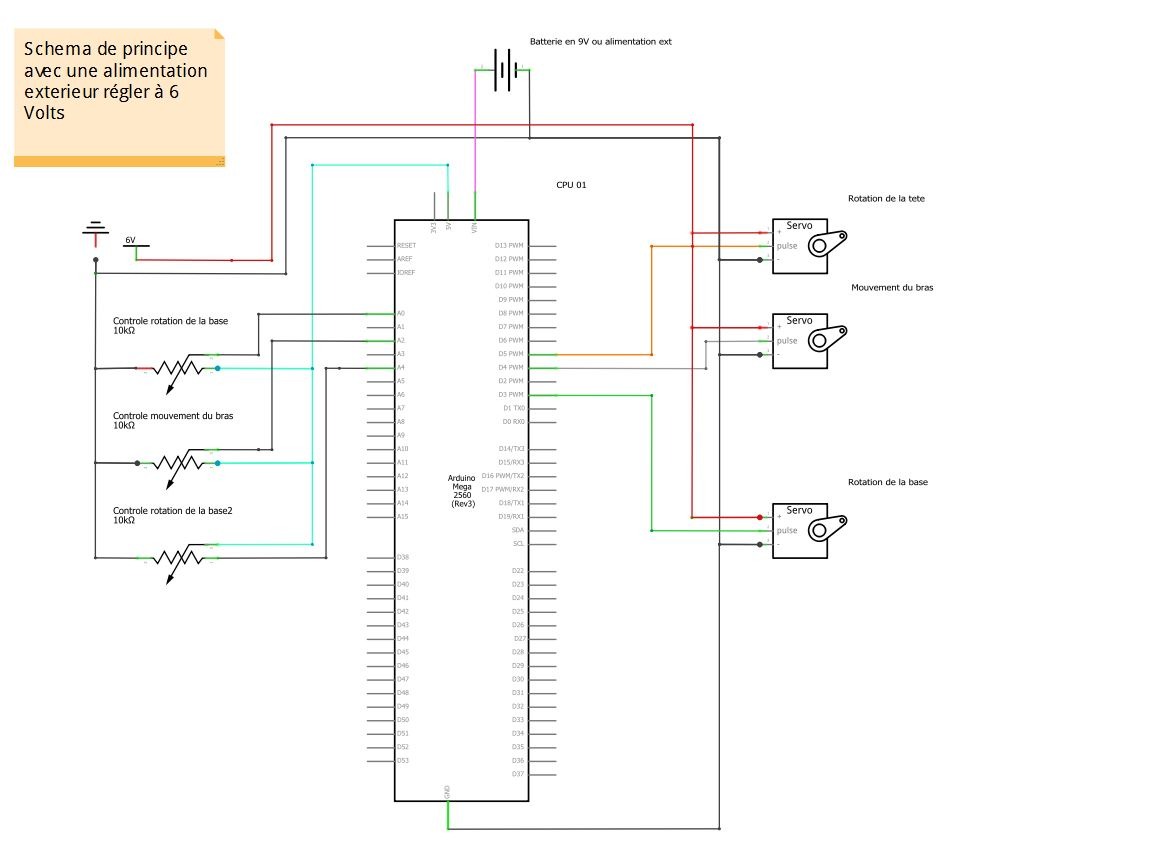
- Redohm : Schéma avec un Arduino Mega cliquez sur le dessin pour l’agrandir
d) Exemple de programme sur Arduino Mega
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 |
/* * * * *RedOhm * * *Programme pour piloter separement chaque moteur du support *trois axes * *le 27/08/2016 * H-Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo" pour la rotation de la base, nommé -> servobase Servo servobase; // Crée un objet de type "Servo" pour l'elevation du bras, nommé -> servobras Servo servobras; // Crée un objet de type "Servo" pour la rotation de la tete, nommé -> servotete Servo servotete; // broche sur lequel est branche le potentiometre servant a piloter le servobase int brochepotar_de_position_servobase=0; // variable contenant la valeur du potentiometre pour le servobase int valeur_potar_position_du_servobase; // broche sur lequel est branche le potentiometre servant a piloter le servobras int brochepotar_de_position_servobras=2; // variable contenant la valeur du potentiometre pour le servobras int valeur_potar_position_du_servobras; // broche sur lequel est branche le potentiometre servant a piloter le servotete int brochepotar_de_position_servotete=4; // variable contenant la valeur du potentiometre pour le servotete int valeur_potar_position_du_servotete; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // initialisation de la connexion série // IMPORTANT : la fenêtre terminal côté PC doit être réglée sur la même valeur Serial.begin(9600); // associe le servomoteur servobase a la broche 3 servobase.attach(3); // associe le servomoteur servobras a la broche 4 servobras.attach(4); // associe le servomoteur servotete a la broche 5 servotete.attach(5); Serial.println("**********************************"); Serial.println("* *"); Serial.println("*support 3 axes *"); Serial.println("* operationnel *"); Serial.println("* *"); Serial.println("**********************************"); Serial.println(" "); //pause presentation delay (5000); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { /* * * traitement pour la position de la base */ // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position_du_servobase=analogRead( brochepotar_de_position_servobase); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_du_servobase=map(valeur_potar_position_du_servobase,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servobase.write(valeur_potar_position_du_servobase); // affiche le texte d'information sans retour a la ligne Serial.print("position actuelle de la base -> "); // affiche la valeur de la position de la base avec retour a la ligne Serial.println(valeur_potar_position_du_servobase); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); /* * * traitement pour la position du bras */ // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position_du_servobras=analogRead(brochepotar_de_position_servobras); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_du_servobras=map(valeur_potar_position_du_servobras,0,1023,54,120); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servobras.write(valeur_potar_position_du_servobras); // affiche le texte d'information sans retour a la ligne Serial.print("position actuelle du bras -> "); // affiche la valeur de la position du bras avec retour a la ligne Serial.println(valeur_potar_position_du_servobras); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); /* * * traitement pour la position de la tete */ // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position_du_servotete=analogRead(brochepotar_de_position_servotete); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_du_servotete=map( valeur_potar_position_du_servotete,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servotete.write( valeur_potar_position_du_servotete); // affiche le texte d'information sans retour a la ligne Serial.print("position actuelle de la tete -> "); // affiche la valeur de la position de la tete avec retour a la ligne Serial.println( valeur_potar_position_du_servotete); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } |
| Retour au sommaire |
2:Montage avec une carte Arduino Uno
Liste du materiel :
- 3 potentiomètre de 10kΩ
- 3 servomoteurs Hitec référence HS-645MG ou Hitec HS422
- 1 carte Arduino Uno
- 1 alimentation variable régler a 6 Volt ou une alimentation fixe 6V
- 1 Alimentation pour la carte micro ( alimentation de 7 à 12 V sur connecteur alim = vin tension positive en entrée ne pas oublier la masse à brancher sur la pin Gnd ).Si on utilise plus de 12V, le régulateur de tension de la carte pourrait chauffer et en cascade détruire la carte )
Liste du matériel avec utilisation du matériel Grove :
- 1 Module Grove Base Shield 103030000 . Le module Grove Base Shield est une carte d’interface permettant de raccorder facilement, rapidement et sans soudure les capteurs et les actionneurs Grove de Seeedstudio sur une carte compatible Arduino.
- 3 Potentiomètre à glissière Grove 101020036 ou potentiomètre rotatif Grove 101020048 .
- 3 servomoteurs Hitec référence HS-645MG ou Hitec HS422 .
- 1 Carte arduino Uno
- 1 alimentation variable régler a 6 Volt ou une alimentation fixe 6V .
- 1 Alimentation pour la carte micro ( alimentation de 7 à 12 V sur connecteur alim = vin tension positive en entrée ne pas oublier la masse à brancher sur la pin Gnd ).Si on utilise plus de 12V, le régulateur de tension de la carte pourrait chauffer et en cascade détruire la carte )
![]()
***
Impression de cage pour HS-645
Fichier STL pour impression 3D de la cage du servomoteur HS-645 MG de chez Hitec avec palonnier