Mise à jour le 28/12/2019 :
Sommaire :
- Capteur Flexible unidirectionnel de type Flex Sensor
- Application des capteurs Flex Sensor
- Spécifications mécaniques
- Spécifications électriques
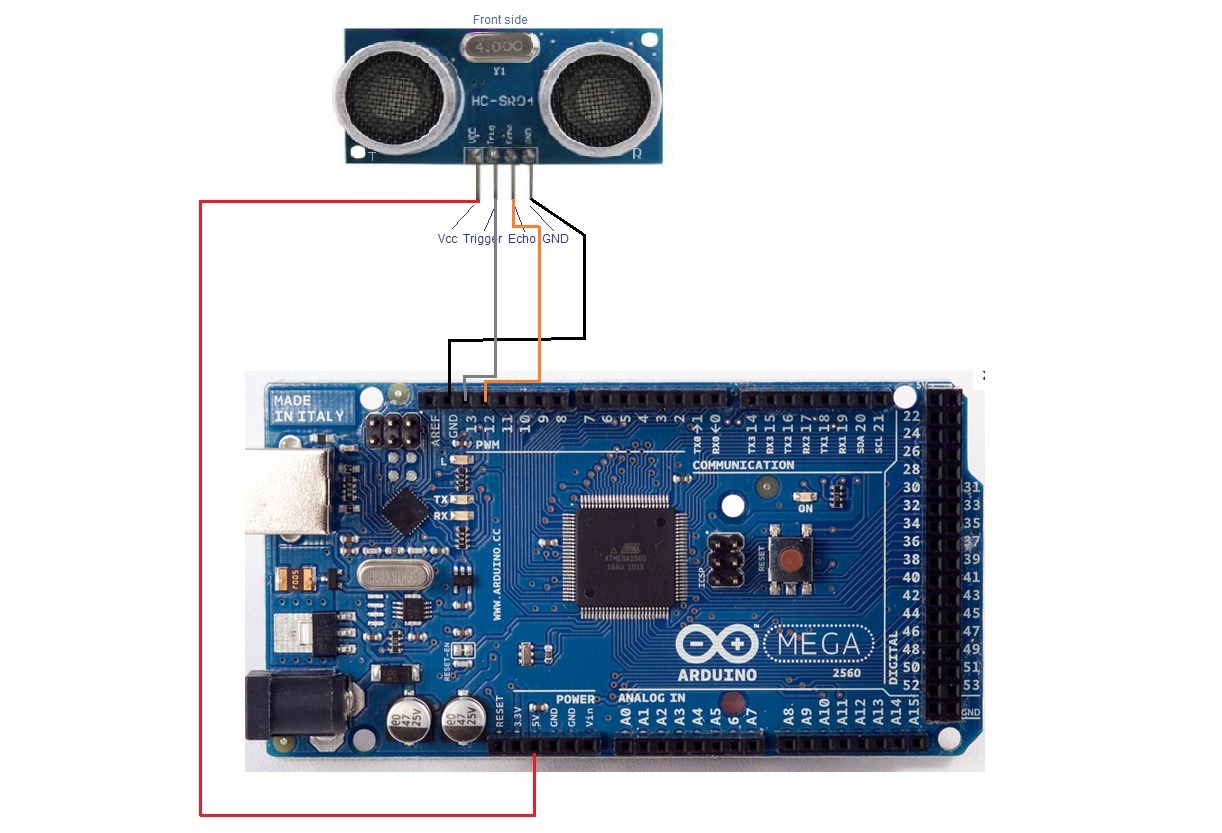
- Application du capteur unidirectionnel
- Definition d’un capteur Flexible bidirectionnel
- Notes et références sur les capteurs de flexion
![]()
Definition d’un capteur Flexible unidirectionnel
|
Un côté du capteur est imprimé avec une encre polymère qui contient des particules conductrices. Lorsque le capteur est droit, les particules confèrent à l’encre une résistance d’environ 30k Ohms. Lorsque le capteur est plié à l’écart de l’encre, les particules conductrices s’éloignent davantage, augmentant cette résistance (à environ 50k-70K Ohms lorsque le capteur est plié à 90 ( principe de fonctionnement du capteur SEN-10264 en 2.2 pouce et le SEN-08606 en 4.5 pouce)
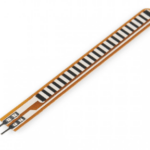
Capteur de flexion : Flex Sensor 2-2
Ce capteur flexible est une résistance variable pas comme les autres. La résistance du capteur de flexion augmente à mesure que le corps du composant se plie.
Les capteurs Flex sont disponibles en deux tailles: une de 2,2 « (5,588 cm) de long et une autre de 4,5 » (11,43 cm) de long .
Laissés à plat, ces capteurs ressembleront à une résistance de 30 kΩ. En se pliant, la résistance entre les deux bornes augmentera jusqu’à 70kΩ à un angle de 90 °..
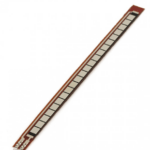
Capteur de flexion : Flex Sensor 4-5
En combinant le capteur flexible avec une résistance statique pour créer un diviseur de tension , vous pouvez produire une tension variable qui peut être lue par le convertisseur analogique-numérique d’un microcontrôleur.
Application des capteurs Flex Sensor
- Robotique
- Jeux (Virtual Motion)
- Équipement médical
- Périphériques d’ordinateur
- Instruments de musique
- Thérapie physique
Spécifications mécaniques du Flex Sensor
- Cycle de vie : > 1 million
- Epaisseur : 0,43 mm (0,017 « )
- Plage de température : -35 ° C à + 80 ° C
Spécifications électriques du capteur Flex Sensor
- Résistance à plat : 10K Ohms ± 30%
- Résistance à la flexion : minimum 2 fois supérieure à la résistance à plat à 180 ° de pincement.
- Puissance nominale : 0,5 watts en continu; 1 Watt de pointe
.
Retour au sommaire![]()
Application du capteur unidirectionnel |
.
.
.
Retour au sommaire![]()
Definition d’un capteur Flexible Bidirectionnel |
Le Capteur Flexible Bidirectionnel est constitué d’un substrat revêtu, tel que le plastique, dont la conductivité électrique est modifiée lorsqu’il se plie. Les systèmes électroniques se connectent au capteur et mesure de manière précise la quantité de flexion ou de mouvement qui se produit. La conception de la couche unique du capteur flexible élimine la plupart des problèmes associés aux capteurs classiques, tels que la poussière, la saleté, les liquides ainsi que les effets de la chaleur et de la pression. Les surlaminés ou le surmoulage peuvent également être appliqués aux capteurs pour augmenter leur protection contre l’environnement.
- Permet de mesurer le mouvement mécanique, le débit d’air, le débit d’eau et même les vibrations.
- Peut être utilisé comme capteur de mouvement ou comme interrupteur très résistant et très fiable.
- Ne comporte aucune pièce mobile et est complètement silencieux en fonctionnement
.
Retour au sommaire![]()
Notes et références sur les capteurs de flexion |
Fournisseur :
Information technique :
- sparkfun pour le capteur unidirectionnel
- spectrasymbol.com pour les capteurs de type FS2L095
.
en cours de réalisation
Retour au sommaire