
Mise à jour le 23/04/2021 : Voici les plans de montage du robot R2-D2 pour l’anneau 1 et la base .
Archives de catégorie : Robotique
Sommaire :
- Matériel utile pour suivre les tutoriels
- Modification de l’identifiant du servo
- Etude des deplacements de la tête avec les servo Dynamixel
- Pilotage d’un Dynamixel par le biais d’un potentiometre
- Retour au menu
Matériel utile pour suivre les tutoriels |
.
ArbotiX-M Robocontroller
Spécifications techniques du Robocontroller ArbotiX-M :
- Microcontrôleur AVR 16 MHz (ATMEGA644p).
- 2 ports série, 1 dédié aux servo-contrôleurs Dynamixel, l’autre au module radio Xbee.
- 32 E / S, dont 8 peuvent fonctionner comme entrées analogiques.
- Embases servo 3 broches (Gnd, Vcc, signal), sur les 8 entrées analogiques et sur les 8 E / S numériques.
- Deux pilotes de moteur 1 A avec en-têtes moteur / encodeur combinés.
- Module radio Xbee vendu séparément. Une installation typique nécessite 2 modules radio Xbee et un module explorateur Xbee pour vous permettre de contrôler votre robot à distance depuis votre ordinateur.
- Ce contrôleur nécessite l’utilisation d’un câble FTDI ou ISP. Nous recommandons la carte de déploiement FTDI 3,3 V avec connecteur à 6 broches.
- Avec des dimensions de 7,11 × 7,11 cm (2,8 « × 2,8 »), ce contrôleur a été conçu pour être utilisé avec les servomoteurs Dynamixel .
Ressources pour le Robocontroller ArbotiX-M
Le Robocontroller ArbotiX-M peut être utilisé avec l’environnement de développement Arduino. Un certain nombre de bibliothèques permettant de contrôler les servomoteurs AX-12 sont disponibles dans la liste de téléchargement ci-dessous.
- Manuel d’utilisation du Robocontroller ArbotiX-M
- Site Web Google Code avec des instructions pour télécharger et configurer le logiciel ArbotiX-M
Module joystick Gravity DFR0061

Module joystick Gravity DFRobot basé sur 2 potentiomètres (axes X et Y) et d’un bouton-poussoir pour des applications spécifiques. Il délivre deux sorties analogiques en fonction de la position des deux potentiomètres et une sortie logique en fonction du bouton-poussoir. Il est livré avec 3 cordons.
- Alimentation : 5 Vcc
- Sorties : 2 analogiques et 1 digitale
- Dimensions : 37 x 32 x 25 mm
Référence DFRobot: DFR0061
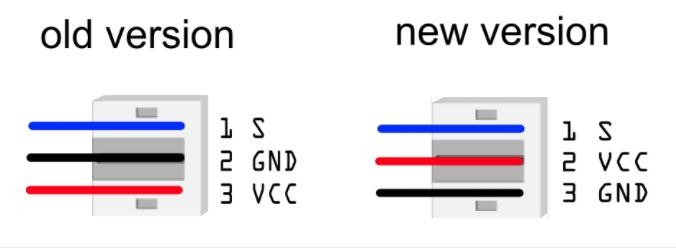
Remarque: la nouvelle version du mappage des broches du port du capteur analogique a été modifiée comme ci-dessous :
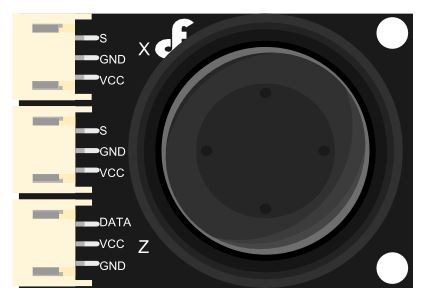
Mappage du Joystik
.
Retour en haut de page
Etude des deplacements de la tête avec les servo Dynamixel |
.
Materiel utile pour le tuto :
- Un module ArbotiX-M Robocontroller
.
Nous allons vous initiez à lire les registres se trouvant à l’intérieur du servomoteur qui nous permet de définir le déplacement de notre servo , ceci afin de déterminer la butée basse et haute que l’on devra appliquer par logiciel pour les mouvements de la tête.
Pour pouvoir lire ses registres, il faut déverrouiller le couple afin pouvoir déplacer la base de la tête de L3 -37 manuellement Avant de se lancer dans l’explication du programme, nous allons vous faire une démonstration du déverrouillage et de la lecture des registres de déplacement par le biai du tuto ci-dessous .
.
.
Programme :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 |
// // //************************************************************* //* //* IDE Arduino 1.0.6 //* //* Mesure de deplacement des moteurs dynamixel //* et verouillage du couple //* //* H-Mazelin //* 29/10/2020 //* //************************************************************* //librairie qui permet d'implémentez le code de communication série //de bas niveau pour communiquer avec le bus Bioloid. #include <ax12.h> //Cette librairies vous permet interagir avec les servos AX et MX #include <BioloidController.h> // definition de la vitesse de transmission // le debit en bauds détermine la vitesse de communication serie entre // le controleur et le servo Dynamixel BioloidController bioloid = BioloidController(1000000); /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup () { //ouvre le port série et fixe le debit de communication à 9600 bauds Serial.begin(9600); // on attent que le port de communication soit pret delay(5000); // Information a l'operateur de l'ouverture du port de communication // sur le moniteur serie Serial.println("========================================"); Serial.println("Communication etablie"); Serial.println("========================================"); // Lecture de la temperature du servo de droite actuel int temperature_d =ax12GetRegister(2,43,1); // Lecture de la temperature du servo de gauche actuel int temperature_g =ax12GetRegister(3,43,1); // Affichage de la lecture des registres contenant la temperature Serial.print("Temperature du servo de droite : "); Serial.print(temperature_d);Serial.println(" Degres"); Serial.print("Temperature du servo de gauche : "); Serial.print(temperature_g);Serial.println(" Degres"); Serial.print(" "); Serial.println("Demarrage *********************"); // Procedure d'ecriture dans le registre 24 pour desactiver le couple // // modification de la valeur 1 par la valeur 0 // 1 parametre : numero d'identifiant du servo // 2 parametre : numero de registre a modifier // 3 parametre : Active ou desactive le couple ax12SetRegister(2,24,0); ax12SetRegister(3,24,0); Serial.println("Couple desactive sur le moteur de droite et de gauche"); } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // Procedure de lecture pour la position du servo dans le registre 36 // // // 1 parametre : numero d'identifiant du servo // 2 parametre : numero de registre a lire // 3 parametre : nombre d'octet a lire int deplacement_d =ax12GetRegister(2,36,2); int deplacement_g =ax12GetRegister(3,36,2); // Affichage de la lecture des registres contenant le deplacement Serial.print("Deplacement du moteur de gauche : "); Serial.print(deplacement_g);Serial.print(" en points "); Serial.print("Deplacement du moteur de droite : "); Serial.print(deplacement_d);Serial.println(" en points "); } |
.
Retour en haut de page.
.
Pilotage d’un Dynamixel par le biais d’un potentiometre |
.
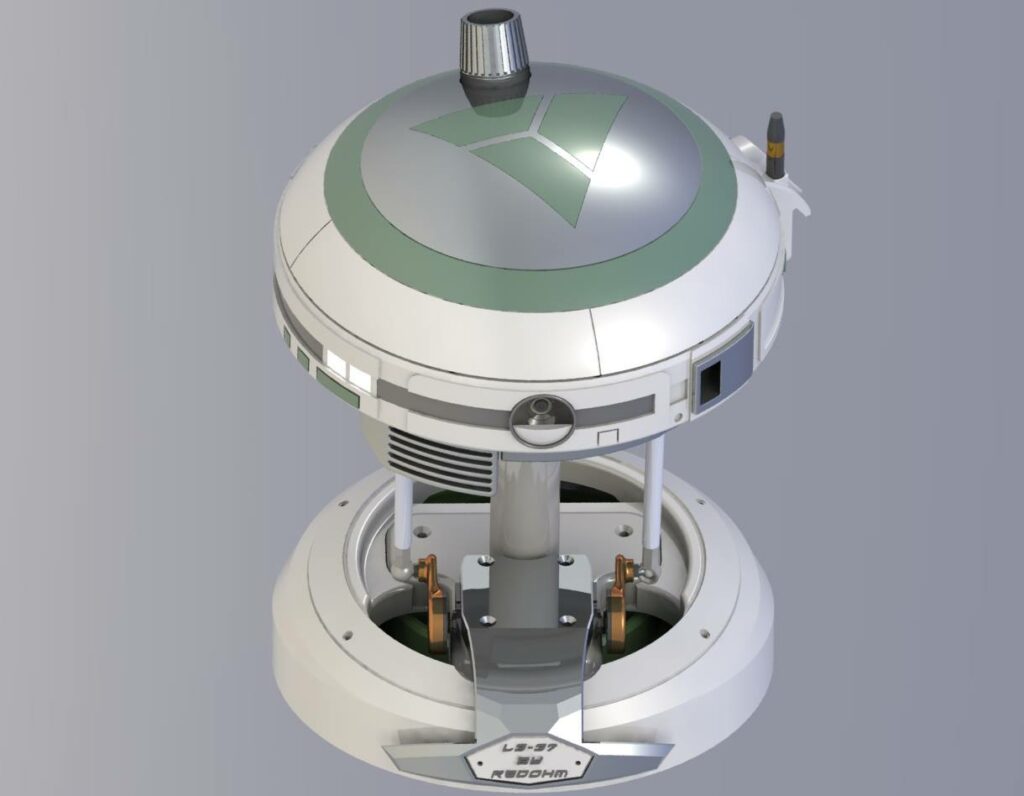
Ce tutoriel a pour but de vous initier à la programmation des servomoteurs Dynamixel . Nous avons pris comme base la tête de L3 -37 qui est une réalisation de RedOhm pour vous expliquer l’étalonnage et le fonctionnement pour piloter celle-ci avec un joystick. Le tuto s’articule en 4 phases :
la première étant la présentation de la base de la tête, le câblage d’un joystick et la carte contrôleur, vous avez aussi une explication sur le fonctionnement de la manette de jeu, et enfin une explication détaillée du programme.
.
.
Materiel utile pour le tuto :
- Un module ArbotiX-M Robocontroller
-
Module joystick Gravity DFR0061
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 |
// // //************************************************************* //* //* IDE Arduino 1.0.6 //* //* Exemple de pilotage d'un servo Dynamixel //* avec un joystick pour la tete de L3-37 //* //* H-Mazelin //* 16/11/2020 //* //************************************************************* //librairie qui permet d'implémenter le code de communication série //de bas niveau pour communiquer avec le bus Bioloid. #include <ax12.h> //Cette librairie vous permet interagir avec les servos AX et MX #include <BioloidController.h> // definition de la vitesse de transmission // le debit en bauds détermine la vitesse de communication serie entre // le controleur et le servo Dynamixel BioloidController bioloid = BioloidController(1000000); // broche sur lequel est branche le potentiometre const int broche1 = A1; const int broche7 = A7; // variable contenant la valeur du potentiometre int valeurPotar1 = 0; int valeurPotar7 = 0; // valeur du potentiometre remis a l'echelle int valeurPotar7_re = 0; int valeurPotar1_re= 0; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécutee une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup () { //ouvre le port série et fixe le debit de communication à 9600 bauds Serial.begin(9600); // on attent que le port de communication soit pret delay(5000); // Information a l'operateur de l'ouverture du port de communication // sur le moniteur serie Serial.println("========================================"); Serial.println("Communication etablie"); Serial.println("========================================"); // Lecture de la temperature du servo de droite actuel int temperature_d =ax12GetRegister(2,43,1); // Lecture de la temperature du servo de gauche actuel int temperature_g =ax12GetRegister(3,43,1); // Affichage de la lecture des registres contenant la temperature Serial.print("Temperature du servo de droite : "); Serial.print(temperature_d);Serial.println(" Degres"); Serial.print("Temperature du servo de gauche : "); Serial.print(temperature_g);Serial.println(" Degres"); Serial.print(" "); Serial.println("Demarrage *********************"); } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeurPotar1=analogRead( broche1); valeurPotar7=analogRead( broche7); // mise a l'échelle (valeur entre 0 et 300 // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeurPotar7_re = map( valeurPotar7,0,1023,0,350); valeurPotar1_re = map( valeurPotar1,0,1023,0,350); // Affichage de la valeur des potentiometre Serial.print("A7 - deplacement en x du potentiometre x -> "); Serial.println(valeurPotar7); Serial.print("A1 - deplacement en y du potentiometre x -> "); Serial.println(valeurPotar1); // Affichage de la valeur re-etalonne des potentiometre Serial.print("A7 - Re-etalonne le deplacement en x du potentiometre -> "); Serial.println(valeurPotar7_re); Serial.print("A7 - Re-etalonne le deplacement en y du potentiometre -> "); Serial.println(valeurPotar1_re); // envoie l'information de deplacement au servomoteur dynamixel340 SetPosition(2,340+valeurPotar7_re); // envoie l'information de deplacement au servomoteur dynamixel // moteur de gauche SetPosition(3,340+valeurPotar1_re); // Affichage du code pour le moteur x avec le calcul Serial.print("Valeur de la position du moteur x => SetPosition(3,340+"); Serial.print(valeurPotar7_re); Serial.println(");"); Serial.print("Valeur du deplacement de moteur x => "); Serial.println(340 + valeurPotar7_re) ; Serial.println(""); Serial.print("Valeur de la position du moteur y => SetPosition(3,340+"); Serial.print(valeurPotar1_re); Serial.println(");"); Serial.print("Valeur du deplacement de moteur y => "); Serial.println(340 + valeurPotar1_re) ; Serial.println("------------------"); delay (100); } |
.
Retour en haut de page.
Mise à jour le 18/11/2020 :
.
Sommaire :
- 001 – Présentation
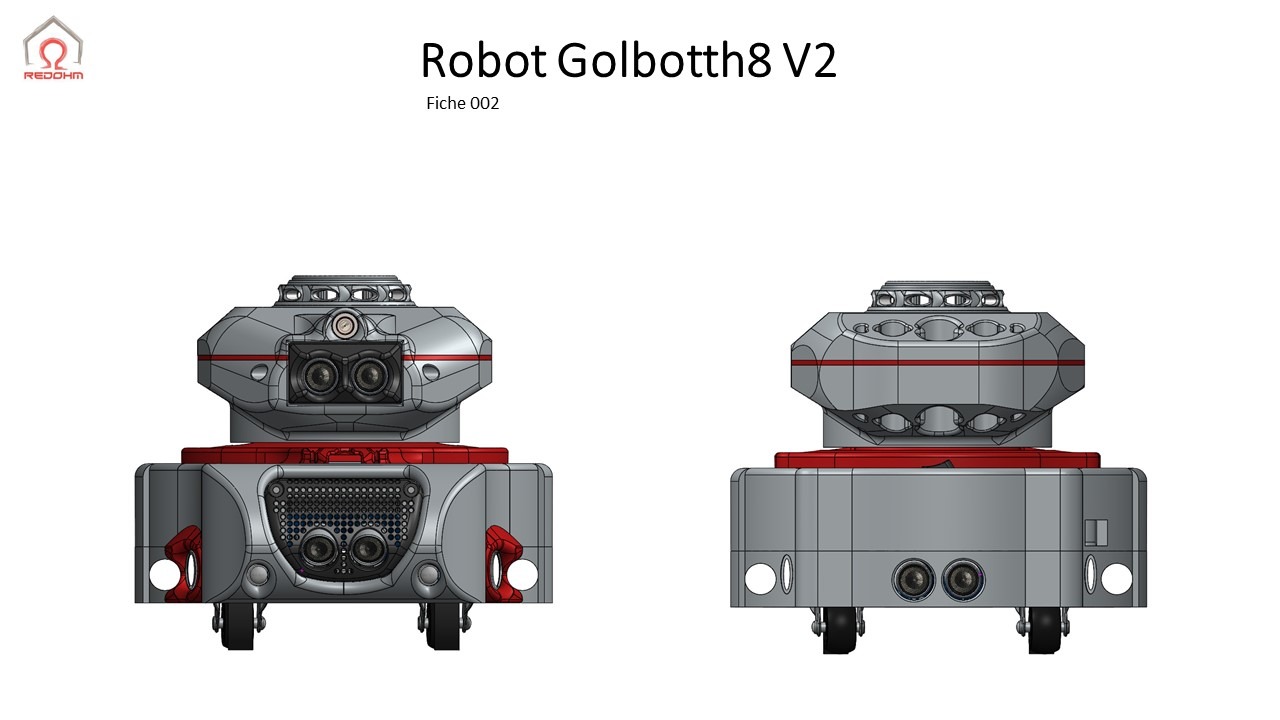
- 002 – Vue de face et arriere
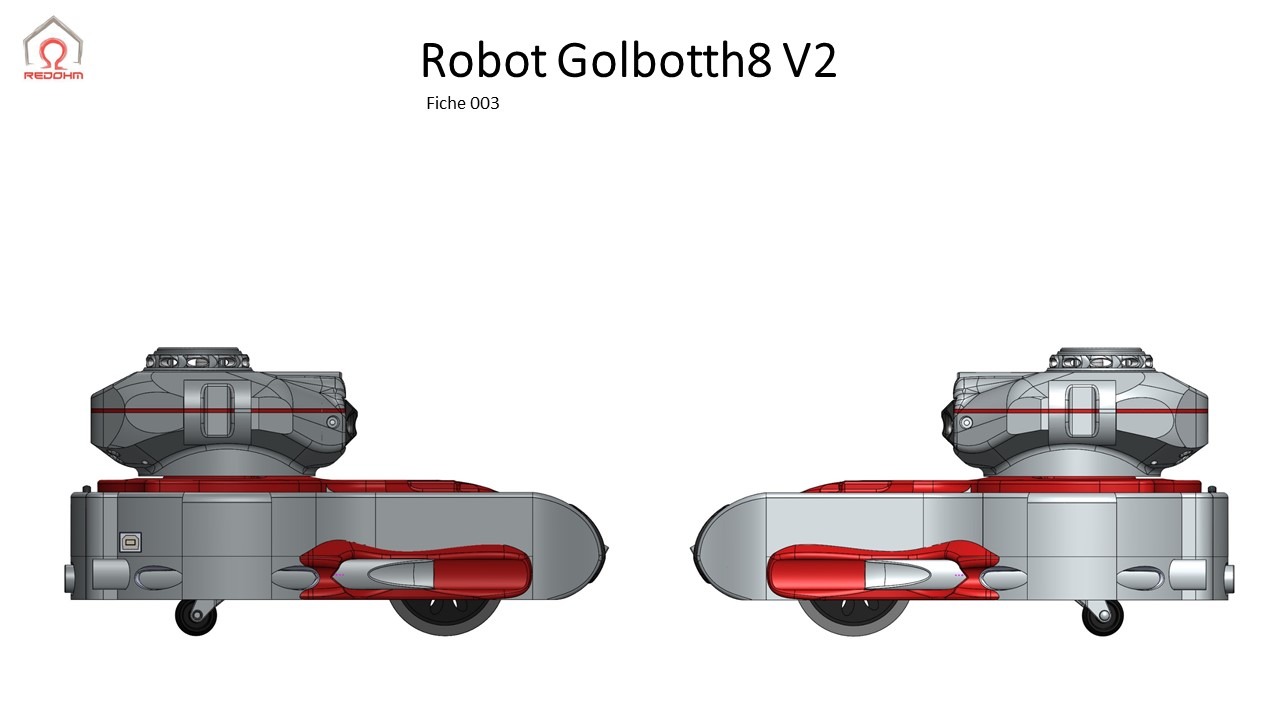
- 003 – Vue de coté
- 004 – Eclaté vue de dessus
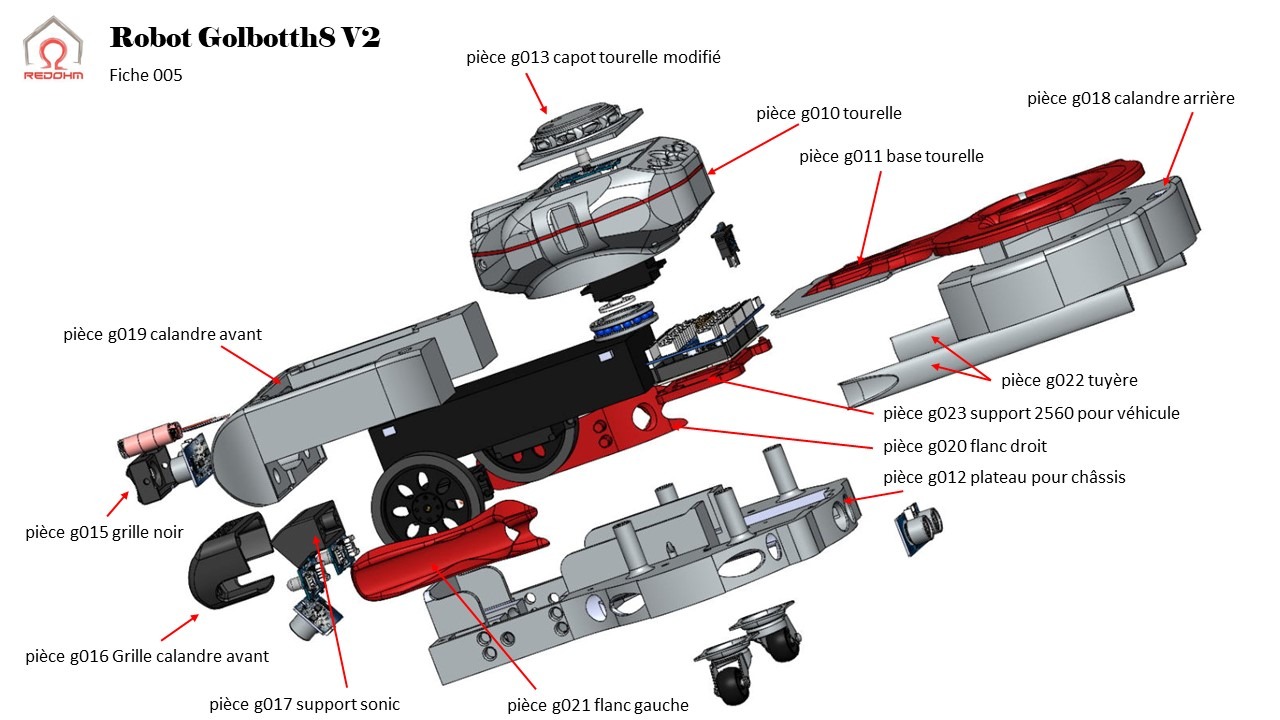
- 005 – Vue eclatée avec repérage des pieces
- 006 – Vue eclatée de coté avec repérage des pieces
- 007 – 008 – Tourelle
- 009 – 010 – Base tourelle
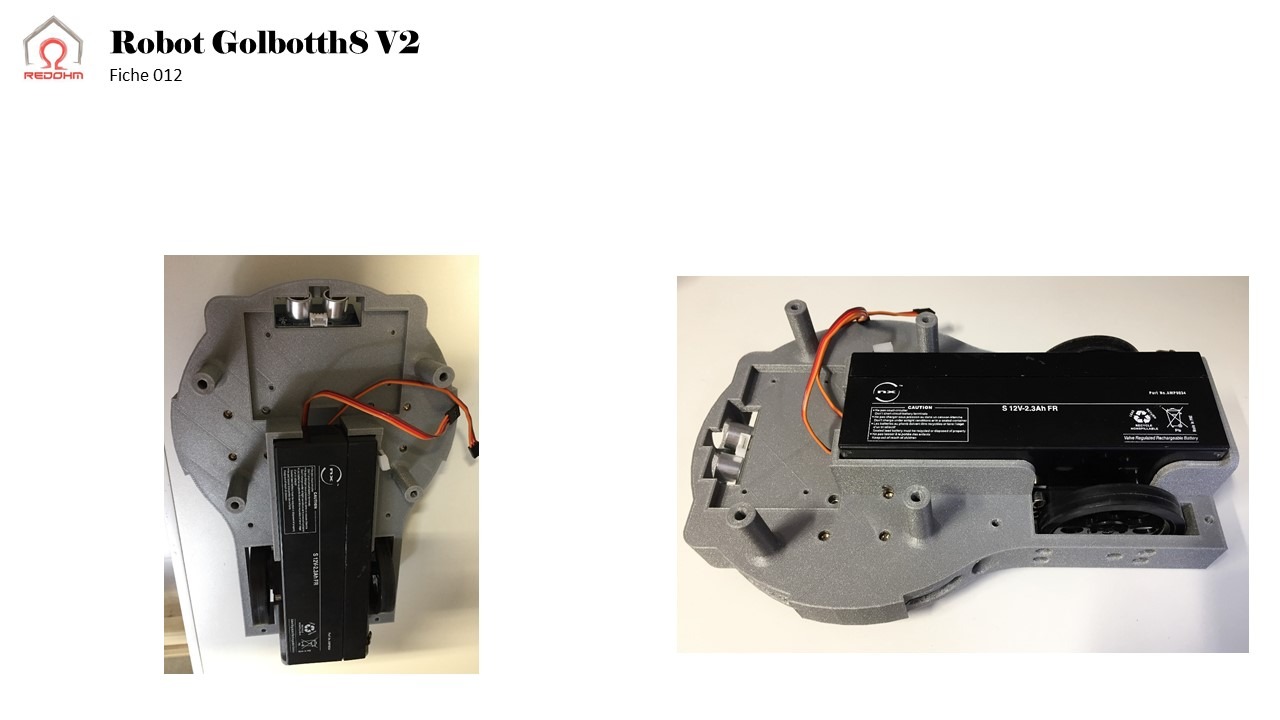
- 011 – 012 – Pièce g012 plateau pour châssis
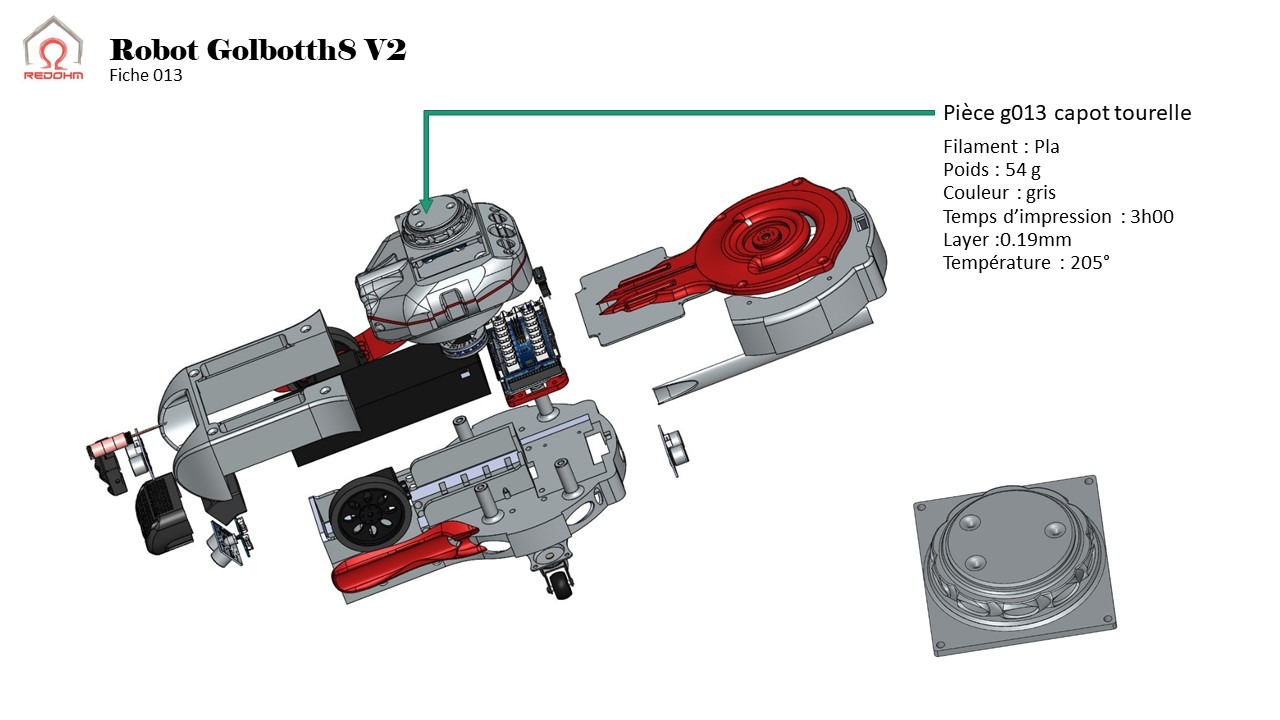
- 013 – capot tourelle
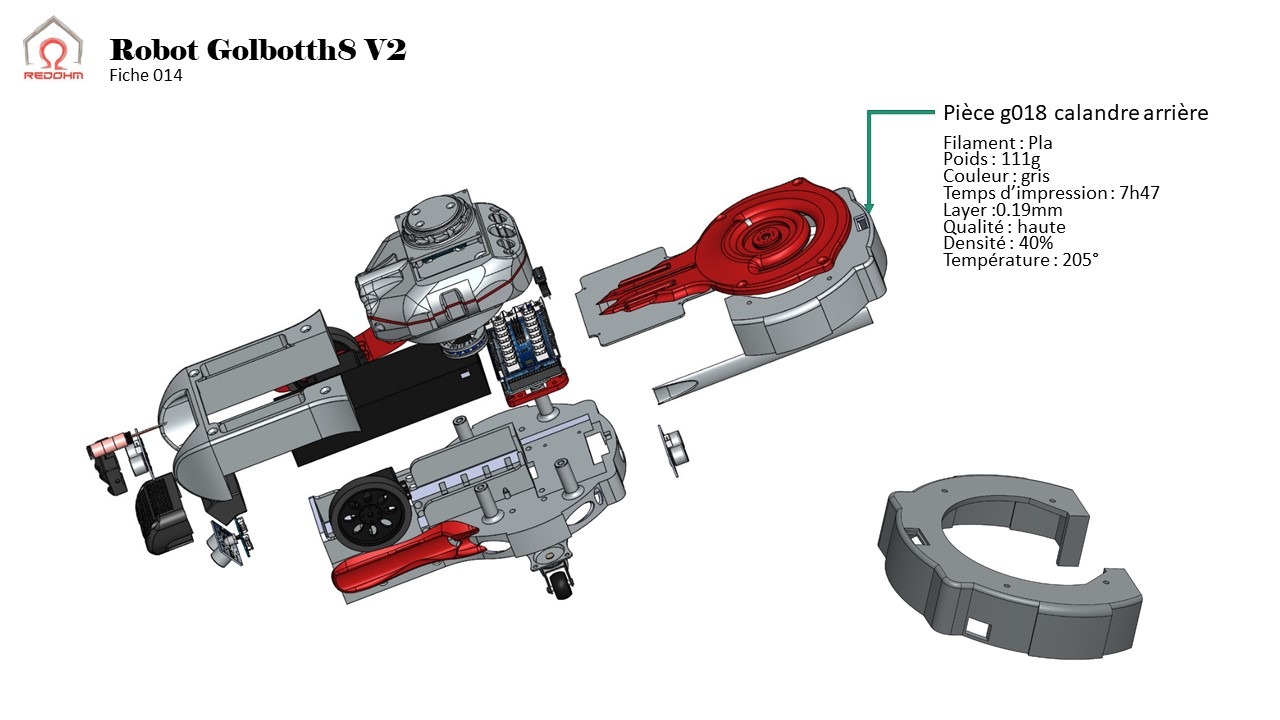
- 014 – Pièce g018 calandre arrière
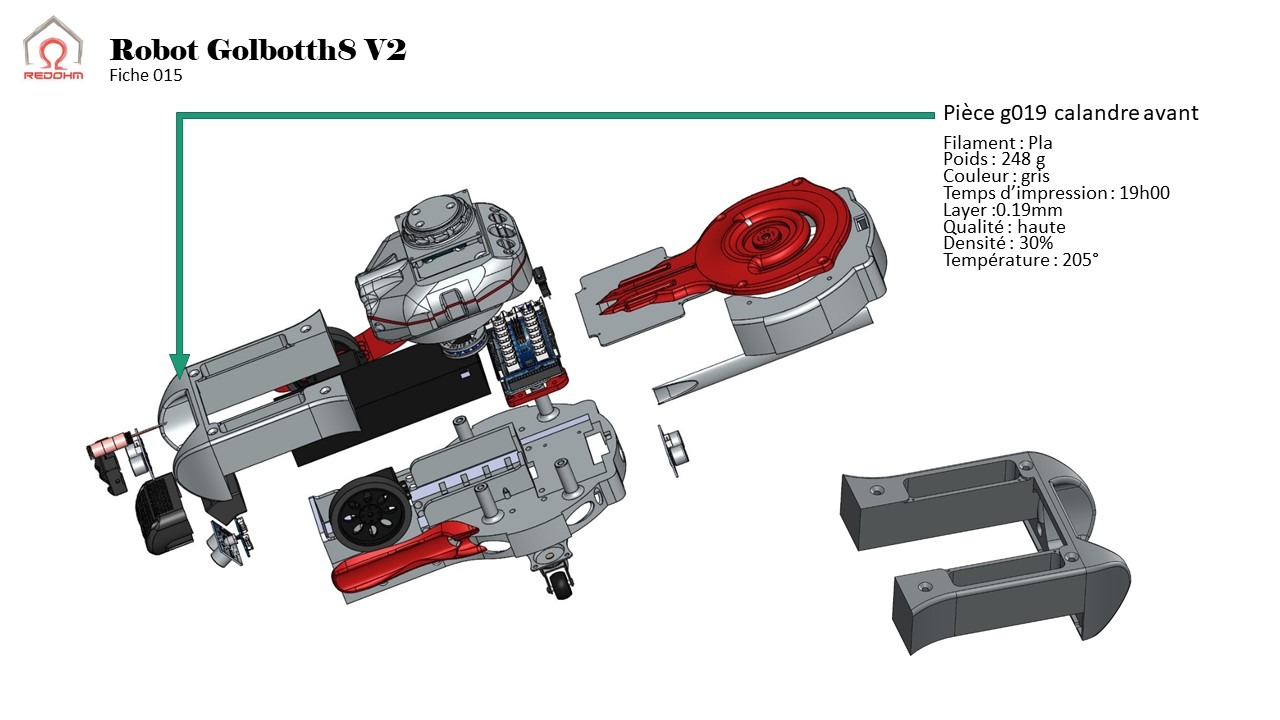
- 015 – Pièce g019 calandre avant
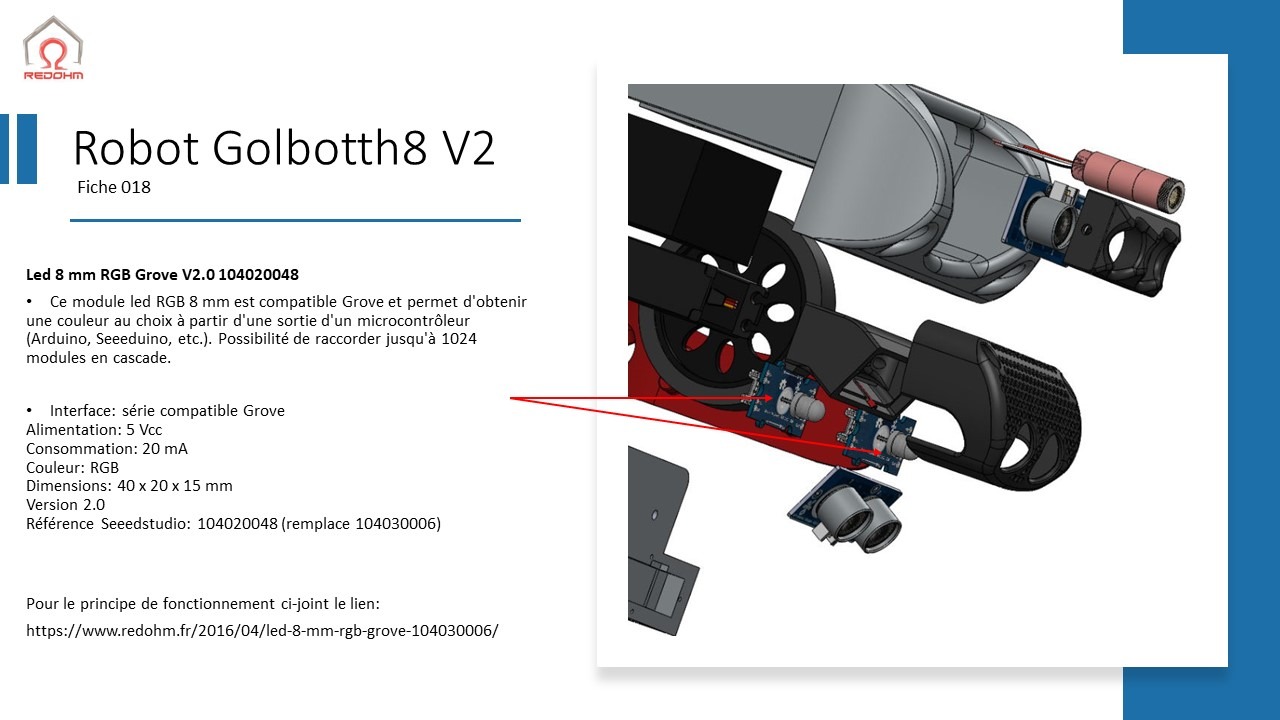
- 018 – Led 8 mm RGB Grove V2.0 104020048
- 019 – 19A – Télémètre à ultrasons Grove 101020010
- Retour a la page principale
.![]()
 .
.
Ce petit robot est destiné à vous initier à la programmation, nous l’appellerons Golbotth8. La construction de cet engin passe déjà par l’impression 3D, vous trouverez l’ensemble des fichiers STL sur notre site ainsi que la matière que nous avons utilisée et les différents conseils techniques. Vous aurez la possibilité de suivre des tutoriels sur Arduino avec ce module. Nous avons surtout essayé de minimiser le coût de l’ensemble.
.
Retour au sommaire
|
.
.
Retour au sommaire.![]() .
.
.
.![]() .
.

.
Retour au sommaire.![]() .
.
.
Retour au sommaire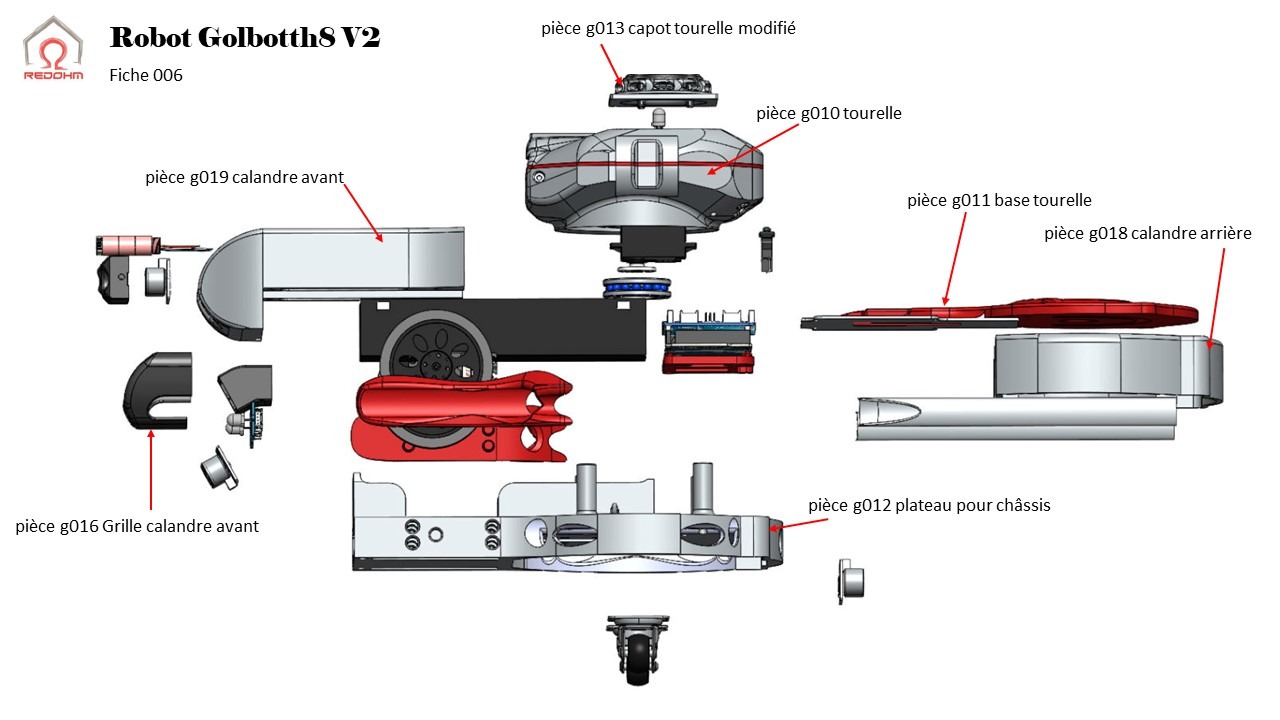
.
Retour au sommaire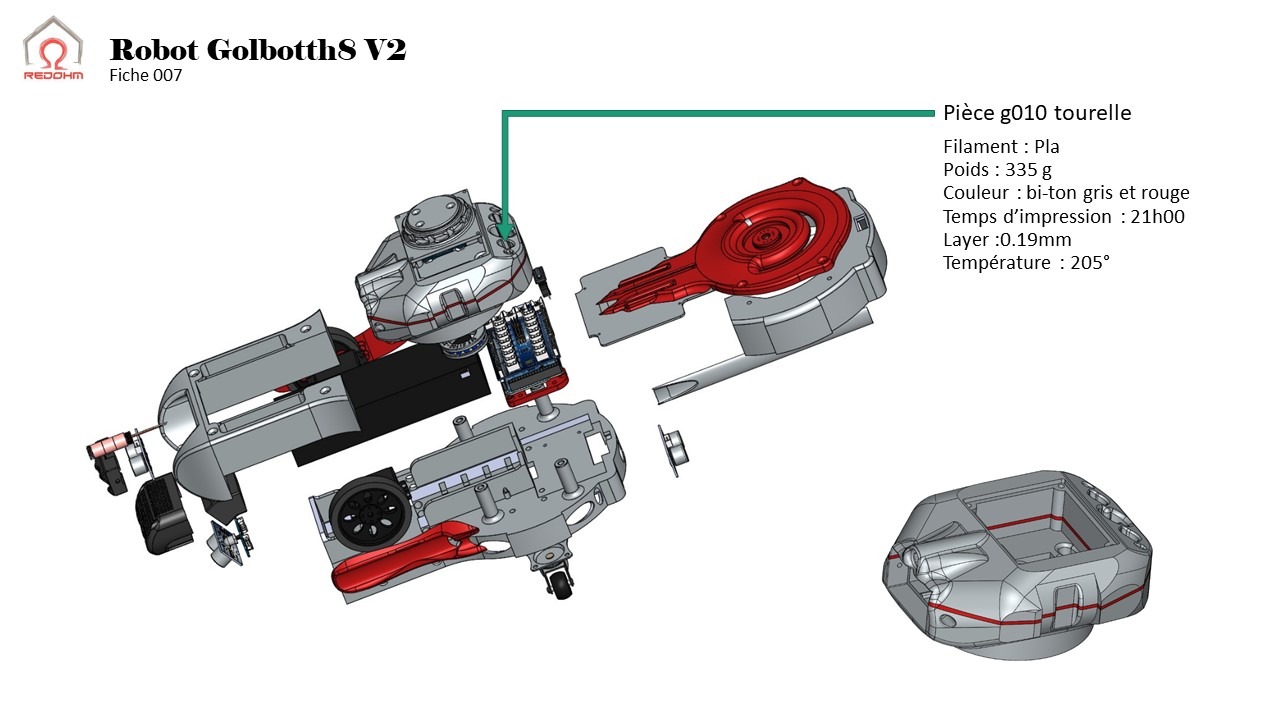
.
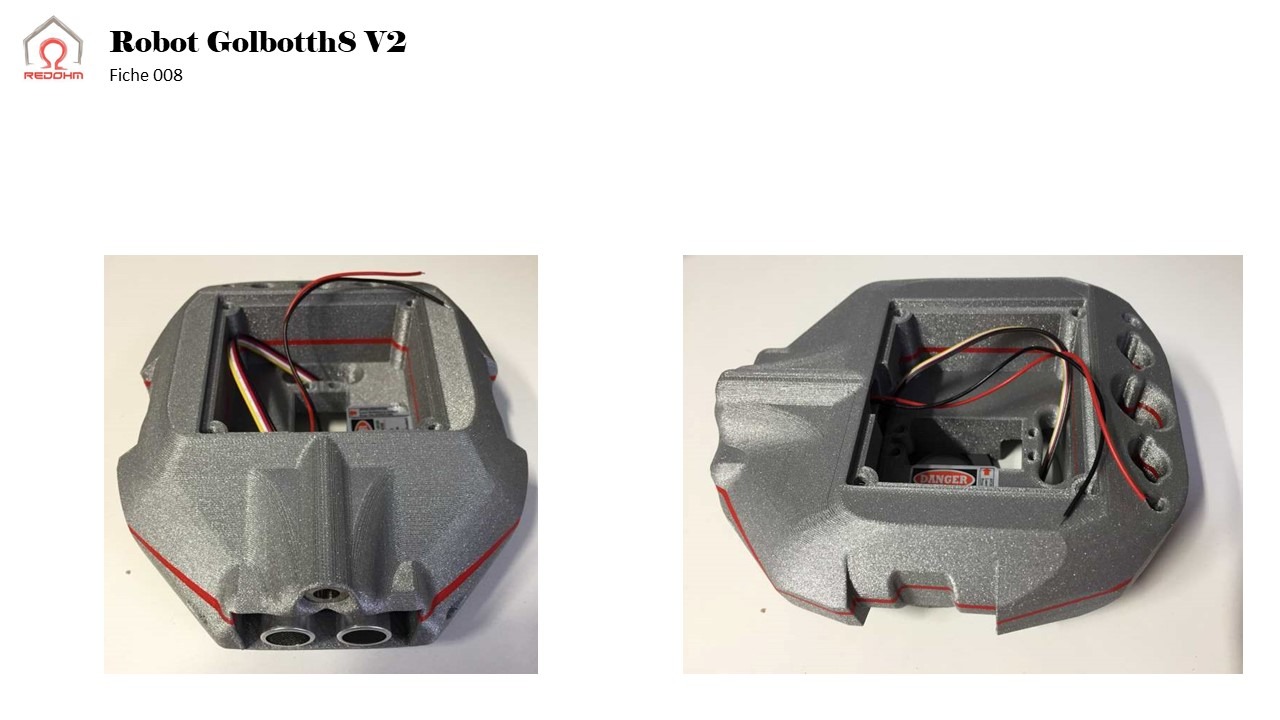
Pièce g010 tourelle – RedOhm
.
- Filament : Pla
- Constructeur du filament : https://www.arianeplast.com/
- Poids : 335 g
- Couleur : bi-ton gris et rouge
- Temps d’impression : 21h00
- Layer :0.19mm
- Température : 205°
.
Retour au sommaire
|
.
.
.
Retour au sommaire
|
.
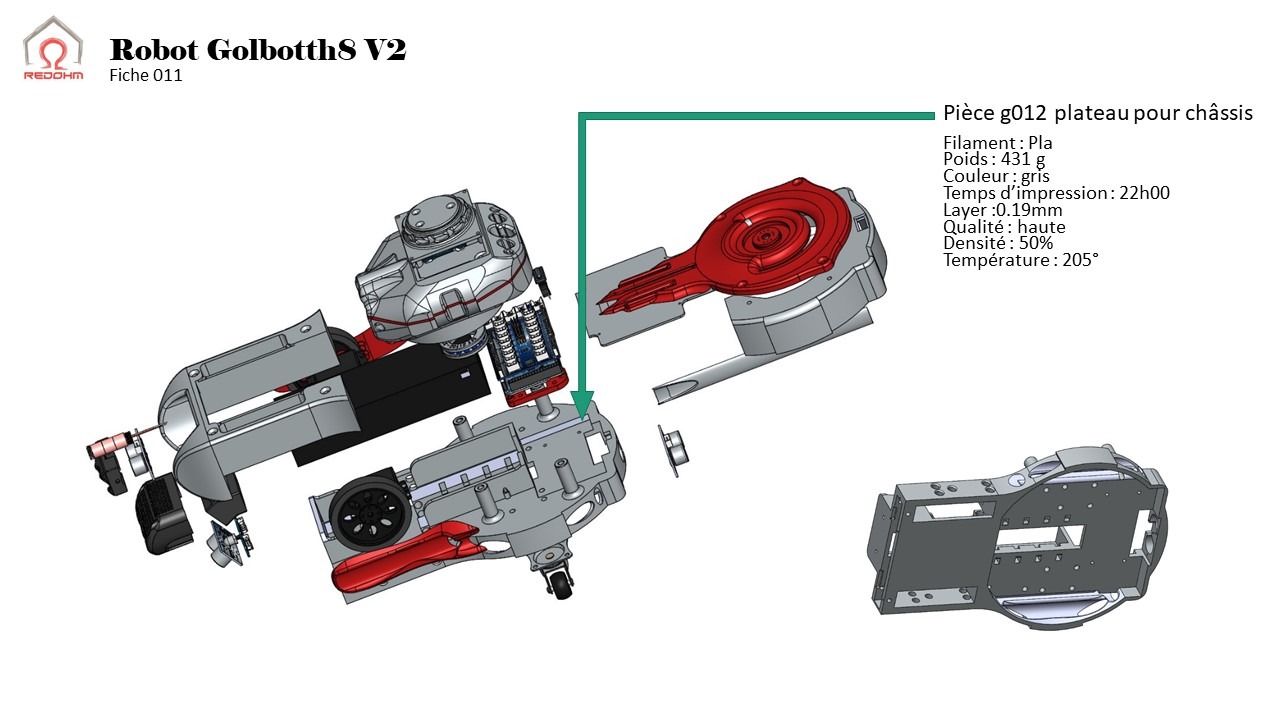
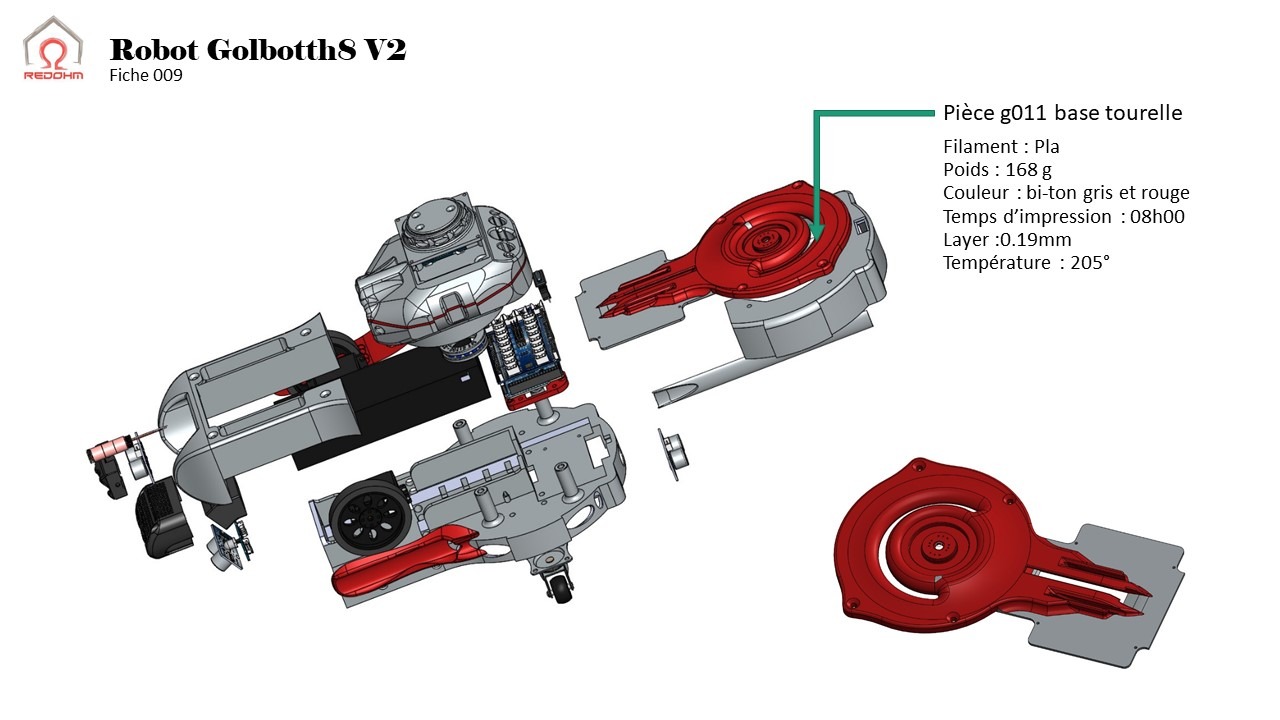
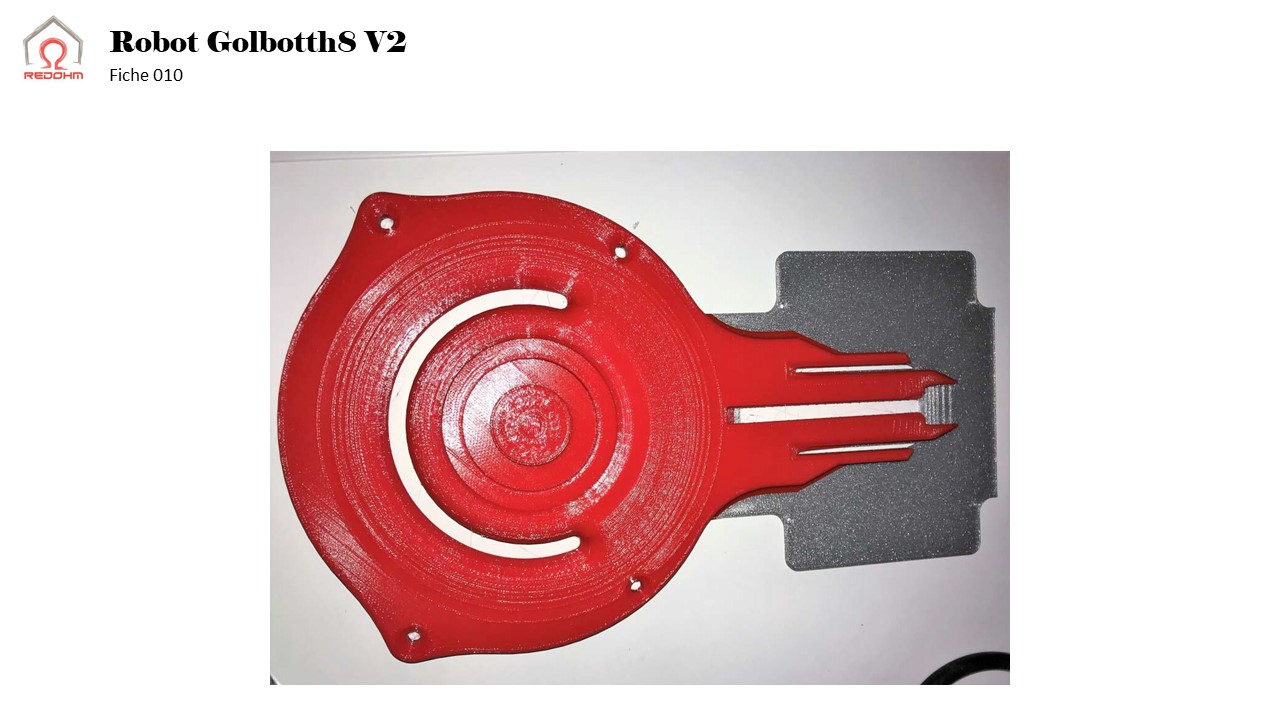
Pièce g012 plateau pour châssis – RedOhm
.
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
.
- Filament : Pla
- Poids : 111g
- Couleur : gris
- Temps d’impression : 7h47
- Layer : 0.19mm
- Qualité : haute
- Densité : 40%
- Température : 205°
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
.
Retour au sommaire
|
.
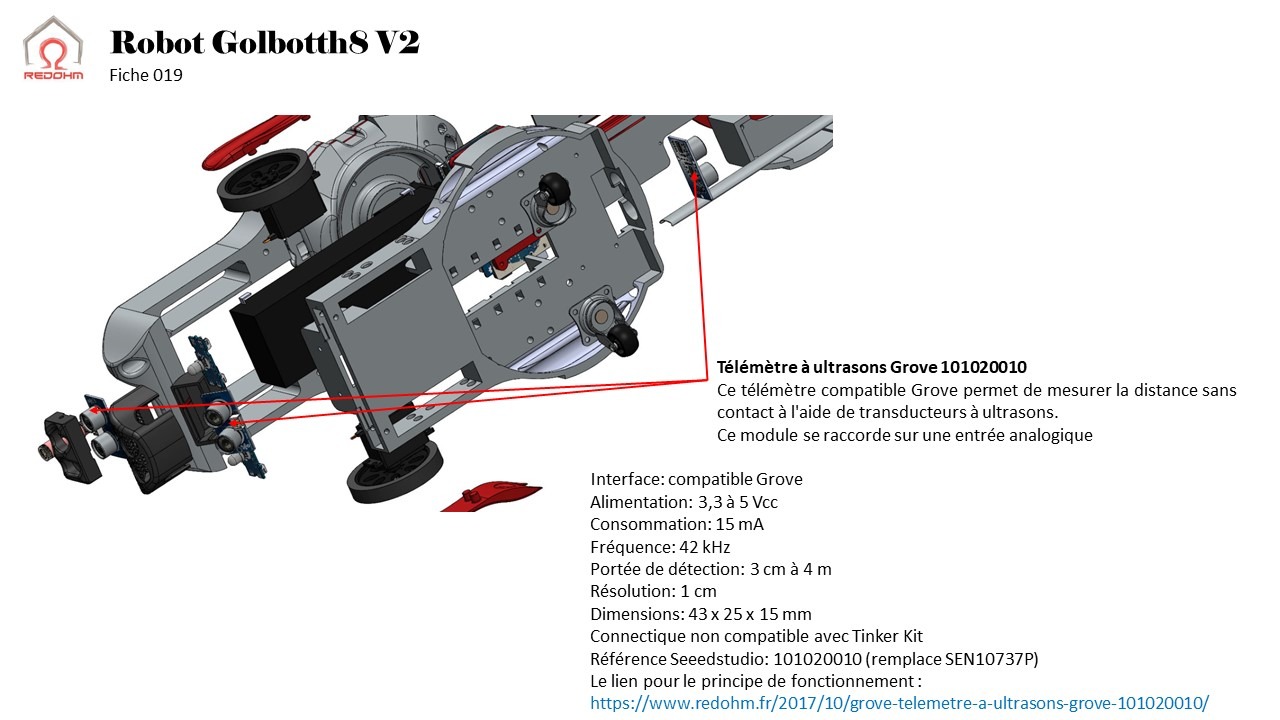
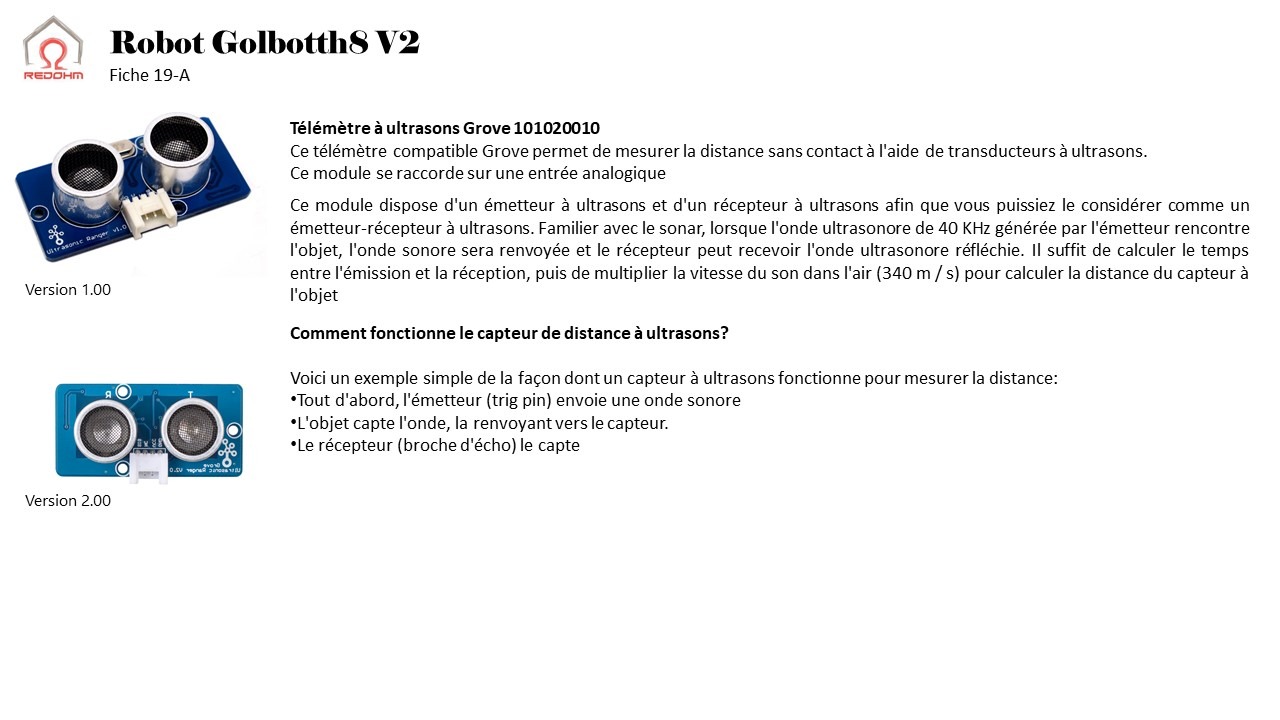
Télémètre à ultrasons Grove 101020010
Ce module dispose d’un émetteur à ultrasons et d’un récepteur à ultrasons afin que vous puissiez le considérer comme un émetteur-récepteur à ultrasons. Familier avec le sonar, lorsque l’onde ultrasonore de 40 KHz générée par l’émetteur rencontre l’objet, l’onde sonore sera renvoyée et le récepteur peut recevoir l’onde ultrasonore réfléchie. Il suffit de calculer le temps entre l’émission et la réception, puis de multiplier la vitesse du son dans l’air (340 m / s) pour calculer la distance du capteur à l’objet.
.
.
Comment fonctionne le capteur de distance à ultrasons?
Voici un exemple simple de la façon dont un capteur à ultrasons fonctionne pour mesurer la distance:
- Tout d’abord, l’émetteur (trig pin) envoie une onde sonore
- L’objet capte l’onde, la renvoyant vers le capteur.
- Le récepteur (broche d’écho) le capte
Le lien pour le principe de fonctionnement : https://www.redohm.fr/2017/10/grove-telemetre-a-ultrasons-grove-101020010/
Téléchargez la bibliothèque UltrasonicRanger depuis Github.
.
.
Retour au sommaire
|
.
.
Retour au sommaireMise à jour le 25/10/2020 : Le robot L3-37 sera reproductible par tous et une grande partie sera en impression 3D.Retrouvez l’ensemble des articles concernant le projet L3-37 sur notre site https://www.redohm.fr ou suivez-nous sur notre chaîne YouTube.( Projet OpenSource )
Sommaire :
- 22/10/2020 : Quelques photo de l’Impression 3D du robot
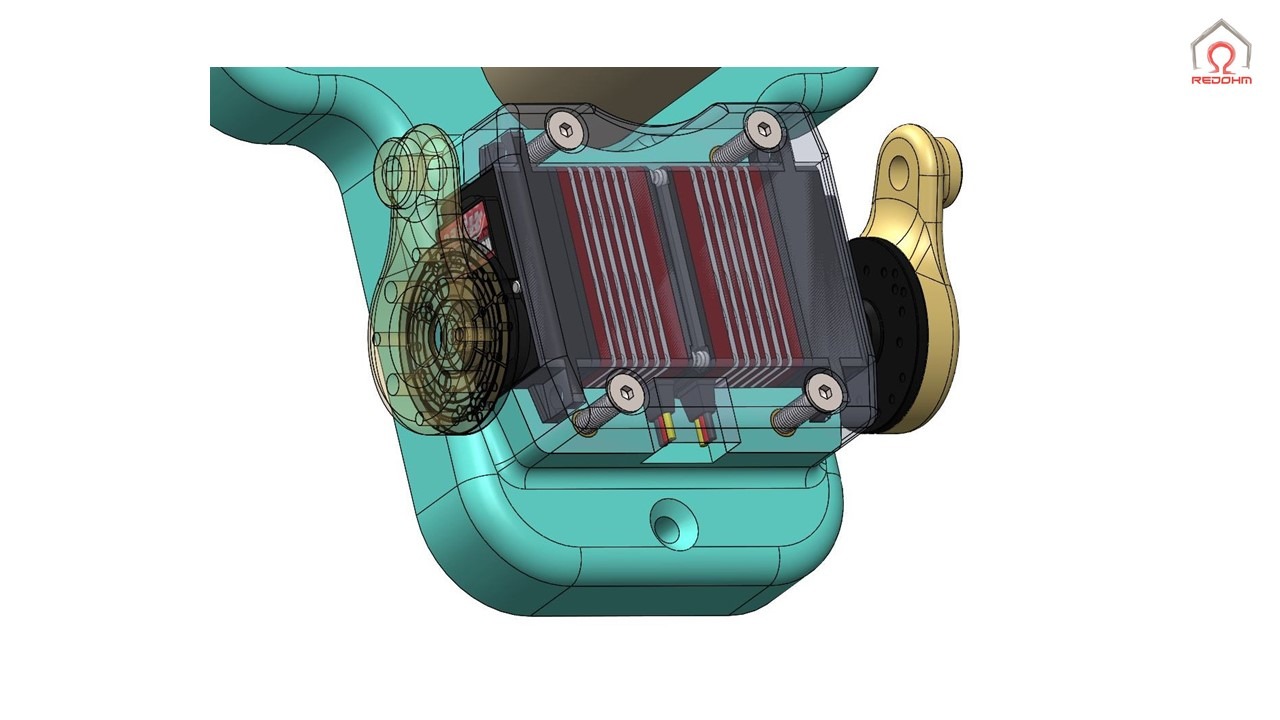
- 24/10/2020 : Motorisation de la tête par des servomoteurs RC
- 25/10/2020 : Base de la tête de L3-37
- 02/11/2020 : Etude des deplacements de la tête avec les servo Dynamixel
- 26/11/2020 : La version L3-37 à servomoteur rc terminée
- Retour au menu principal
25/10/2020 – Base de la tête de L3-37
22/10/2020 – Quelques photos de l’impression 3D du robot |
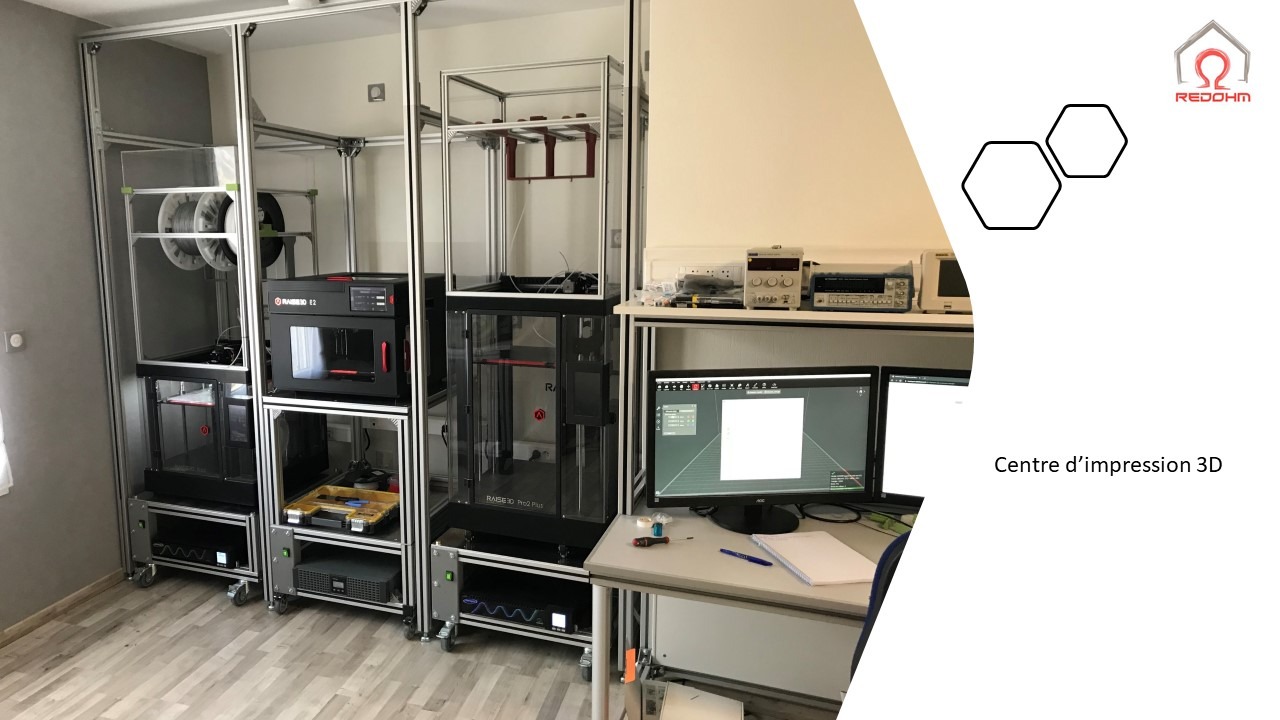
Centre d’impression 3D
.


.
Retour en haut de page
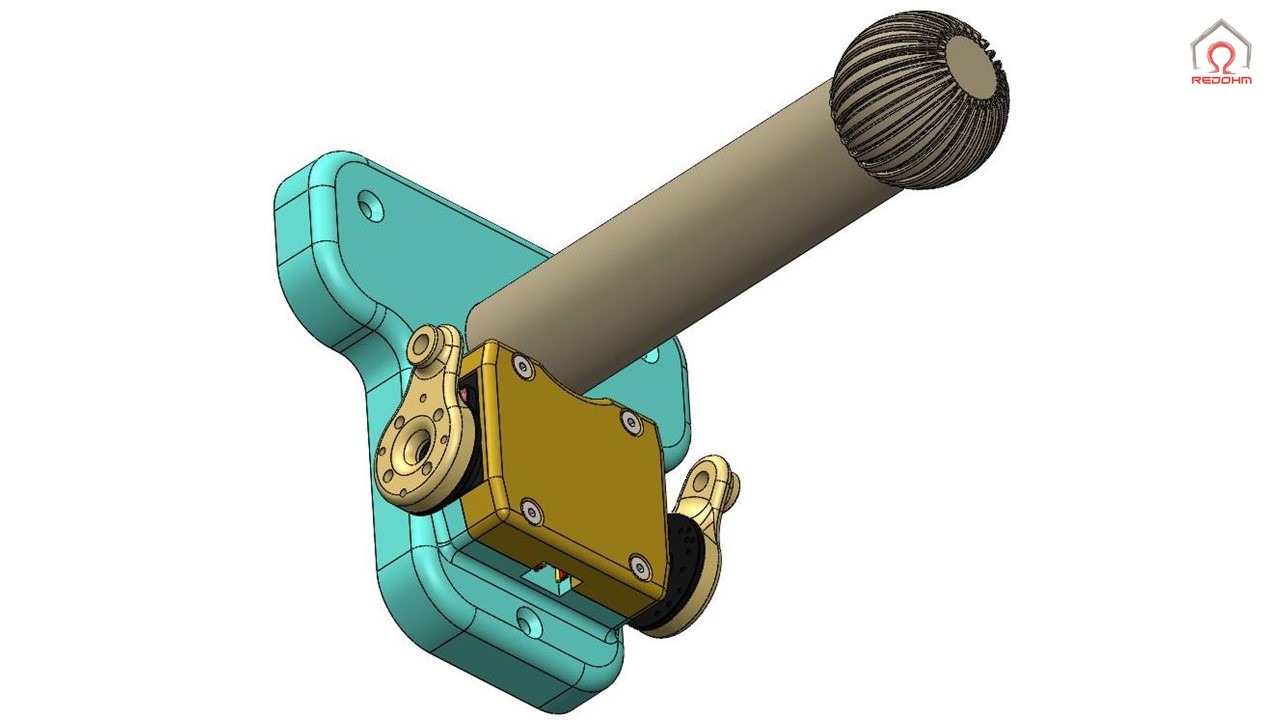
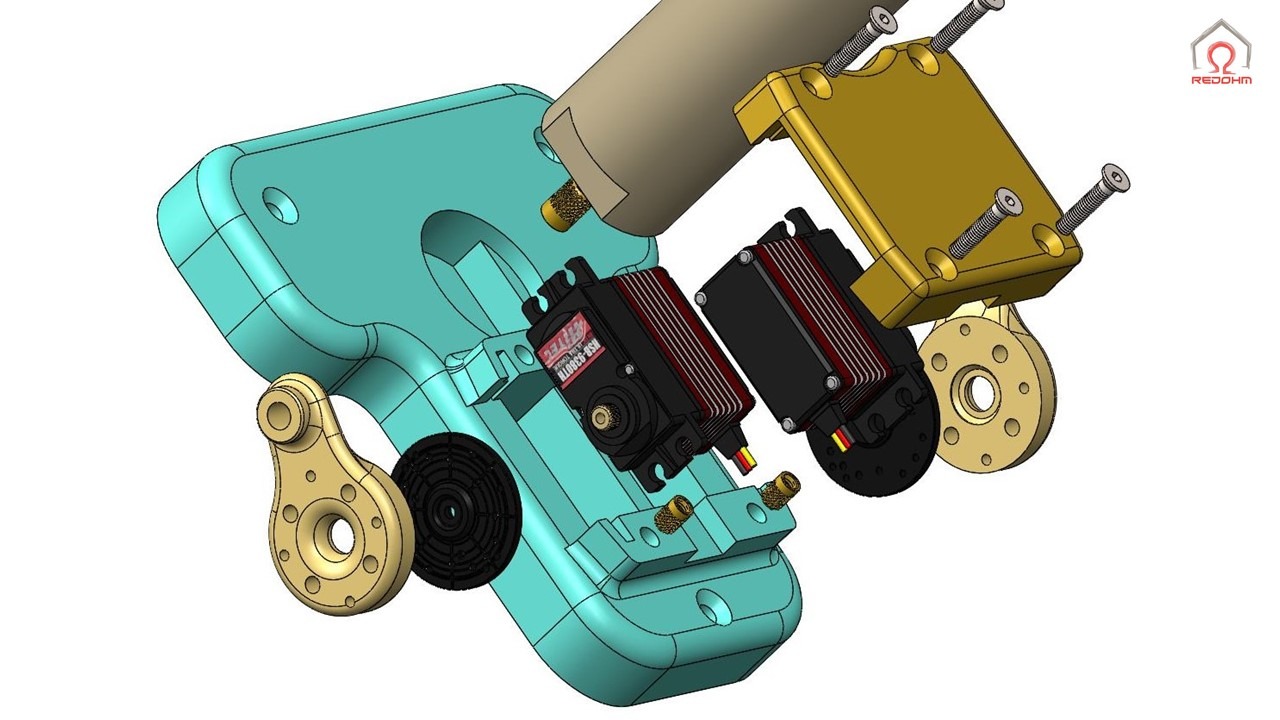
24/10/2020 – Motorisation de la tête par des servomoteurs RC type
|
.
Voici des fiches techniques un peu plus détaillées sur la motorisation par servomoteur RC. Bien conscient que les servomoteurs proposés ont un prix un peu élevé et qui pourrait bien évidemment repousser quelques passionnés, nous allons donc vous proposer une troisième plate-forme avec des servomoteurs du même constructeur mais avec un prix moindre. Nous choisirons donc le Hiltec HS 805BB. Nous sommes bien évidemment ouverts à d’autres propositions de servomoteurs en respectant un couple de fonctionnement de 20 kg.cm minimum. Au niveau du câblage et de la programmation, cela ne changera pas grand-chose.
.

L3-37-Version servomoteur RC – RedOhm
L3-37-Version servomoteur RC – RedOhm 001
.
L3-37-Version servomoteur RC – RedOhm 002
L3-37-Version servomoteur RC – RedOhm 003
.
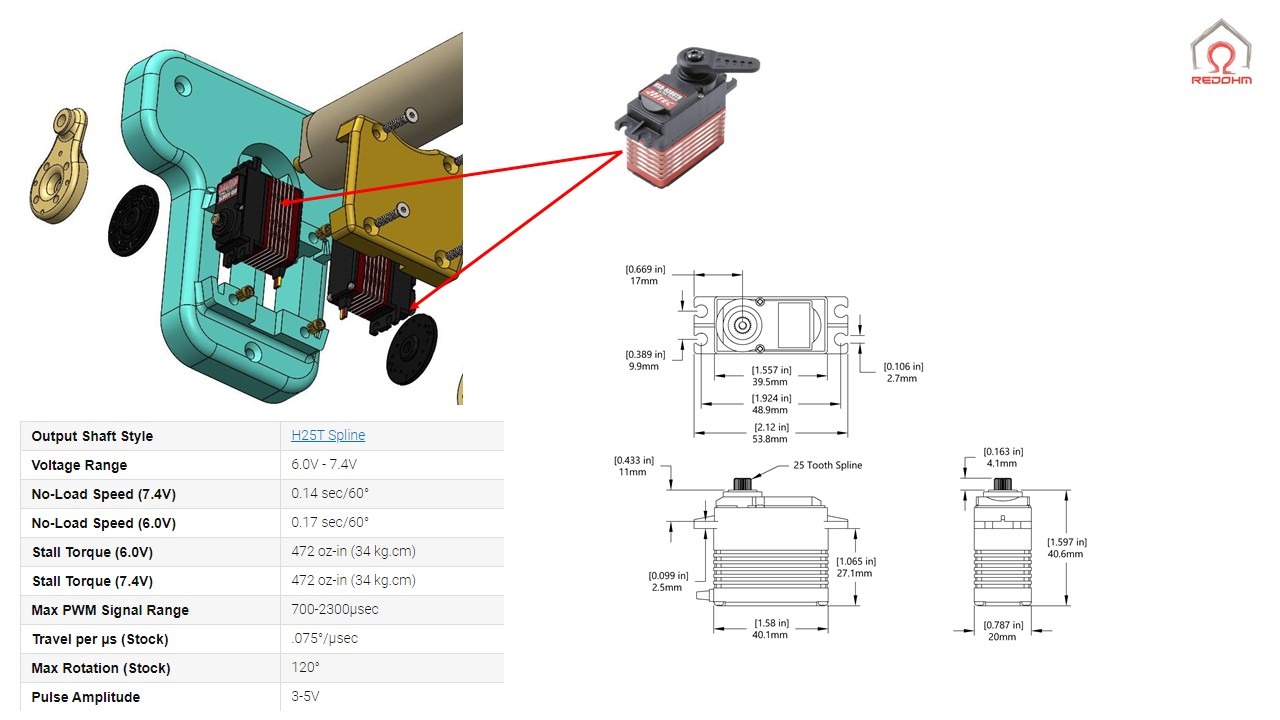
Information complementaire sur le servomoteur HSB-9380TH
Electrique : Bien que compatible avec la plupart des dispositifs de radiocommande, la fonction de freinage par récupération des servos de la série HSB-93XX peut poser un problème si le dispositif ne peut pas accepter un reflux de courant. Les types d’appareils qui ne peuvent pas accepter ce reflux sont: les régulateurs de tension, les récepteurs Power Safe et certains circuits BEC, qu’ils soient autonomes ou intégrés dans un contrôle de vitesse électronique.
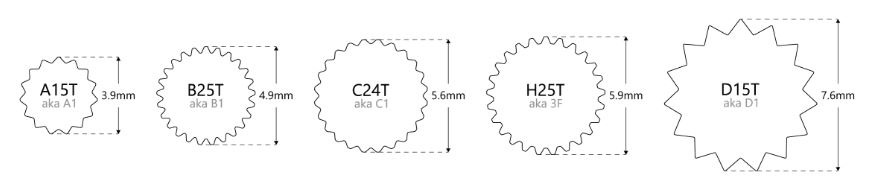
Mécanique arbre de sortie :
Les servos ont un arbre de sortie qui utilise généralement un profil cannelé afin de transférer le couple de l’arbre de sortie dans l’accessoire servo qui y est fixé. Ce profil cannelé est généralement classé en fonction du nombre de dents, cependant, il est possible que deux servo-cannelures très différentes aient le même nombre de dents car elles ne capturent pas le diamètre de la cannelure ou le profil de la dent. Par exemple, A15T et D15T ont tous deux 15 dents, mais le D15T est une taille de cannelure beaucoup plus grande que l’A15T. Les graphiques ci-dessous sont des représentations lâches des tailles de spline courantes que l’on trouve sur les servos amateurs. Si vous avez un servo que nous n’offrons pas sur le site, vous pouvez vérifier si votre servo a une spline qui correspond à l’un des profils de spline ci-dessous en comptant les dents et en mesurant la distance à travers la spline.
Données techniques HSB -9380 TH
- Style d’arbre : H25T Spline
- Gamme de tension : 6.0V – 7.4V
- Vitesse à vide à 7,4 Volts : 0.14 sec/60°
- Vitesse à vide à 6 Volts : 0.17 sec/60°
- Couple de décrochage à 6 volts : 472 oz-in (34 kg.cm)
- Couple de décrochage à 7,4 volts : 472 oz-in (34 kg.cm)
- Plage de signal PWM maximale : 700-2300μsec
- Travel per µs (Stock) : .075°/μsec
- Rotation maximal : 120°
- Amplitude d’impulsion : 3-5V
- Température de fonctionnement : -20°C to +60°C
- Rotation continue modifiable : oui
- Direction avec / augmentation du signal PWM : Dans le sens des aiguilles d’une montre
- Largeur de la bande morte : 2µs
- Type de moteur : Brushless
- type de rétroaction ; 5KΩ Potentiometer
- Support d’arbre de sortie : roulements à billes doubles
- Materiaux pour les engrenages : Titane (Hybrid MPD 1st Gear)
- Rotation maximal ( reprogrammée ) : 205°
.
L3-37-Version servomoteur RC – RedOhm 005
.
Retour en haut de page
25/10/2020 – Base de la tête de L3-37 |
.

Base de la tête de L3-37 – RedOhm 001
.
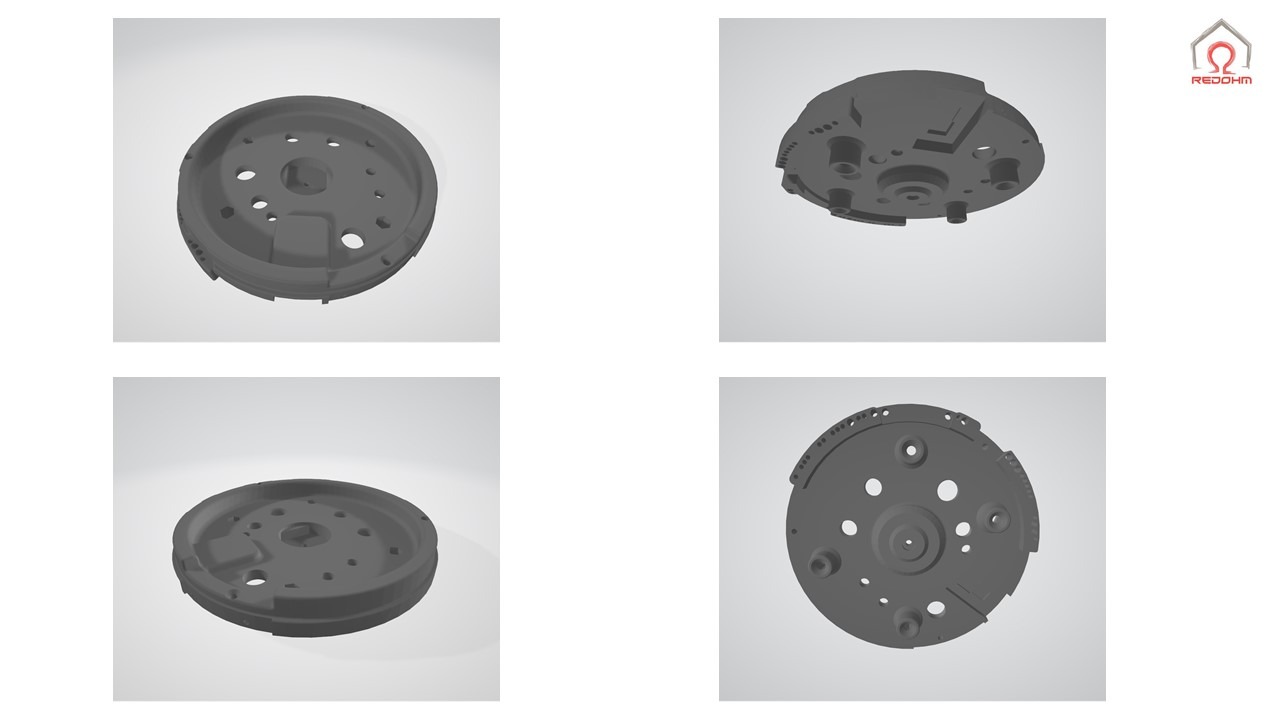
Base de la tête de L3-37 – RedOhm 002
.
Retour en haut de page.
02/11/2020 : Etude des deplacements de la tête avec les servo Dynamixel |
.
Dans le cadre du projet L3 -37, nous utilisons deux sortes de motorisations pour piloter la tête du robot ou des moteurs de type RC (souvent utilise en modélisme ) ou bien des moteurs du type Dynamixel.
Dans le cadre de ce tutoriel qui ne traite que des moteurs Dynamixel, nous allons vous initiez à lire les registres se trouvant à l’intérieur du servomoteur qui nous permet de définir le déplacement de notre servo , ceci afin de déterminer la butée basse et haute que l’on devra appliquer par logiciel pour les mouvements de la tête.
Pour pouvoir lire ses registres, il faut déverrouiller le couple afin pouvoir déplacer la base de la tête de L3 -37 manuellement Avant de se lancer dans l’explication du programme, nous allons vous faire une démonstration du déverrouillage et de la lecture des registres de déplacement par le biai du tuto ci-dessous .
.
Retour en haut de page
26/11/2020 : La version L3-37 à servomoteur rc terminée |
.

.

.
Voici donc la version L3 -37 à servomoteur RC terminé on peut cependant regretter un petit manque de résolution sur la tête qui ne fait pas ressortir des courbes suffisamment fluides. Pour cela nous allons modifier la résolution de nos fichiers STL ce qui permet de s’approcher au mieux des surfaces du modèle 3D en revanche ce procédé augmente la taille du fichier STL. Vous aurez donc le choix entre télécharger la version standard ou la version haute résolution.
.
Retour en haut de page
0.
2/11/2020 : Etude des deplac
ements de la tête avec les servo Dynamixel
.
Sommaire :
- 2020/10/21 : Présentation de L3-37
- 2020/11/02 : L3-37 Pilotage de la tete d’un robot
- Pour tout probléme
- Retour au menu Vidéo
.
2020/10/21 : Présentation de L3-37 |
Voici donc une brève présentation de la tête du robot L3 -37. Ce robot sera construit en plusieurs parties. Nous allons commencer déjà par la tête et un début de buste pour qu’il puisse avoir déjà une certaine utilité ne serait-ce que pour la programmation ou bien servir d’instrument d’interfaçage en domotique. Dans cette présentation qui fait office de tutoriels ,vous avez une explication bien que sommaire des différentes étapes de construction de la tête. Pour tout autre information comme les fichiers STL, les programmes, les schémas ,vous aurez ces informations sur notre site. Je vous rappelle aussi que ce projet est open source.
.
.
Retour au sommaire
2020/11/02 : L3-37 Pilotage de la tete d’un robot |
Dans le cadre du projet L3 -37, nous utilisons deux sortes de motorisations pour piloter la tête du robot ou des moteurs de type RC souvent utilise en modélisme ) ou bien des moteurs du type Dynamixel .
Dans le cadre de ce tutoriel qui ne traite que des moteurs Dynamixel, nous allons vous initiez à lire les registres se trouvant à l’intérieur du servomoteur qui nous permet de définir le déplacement de notre servo , ceci afin de déterminer la butée basse et haute que l’on devra appliquer par logiciel pour les mouvements de la tête.
Pour pouvoir lire ses registres, il faut déverrouiller le couple afin pouvoir déplacer la base de la tête de L3 -37 manuellement Avant de se lancer dans l’explication du programme, nous allons vous faire une démonstration du déverrouillage et de la lecture des registres de déplacement.
.
.
Retour au sommaire
Pour tout probléme |
.
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celle qui vous intéresse .
.
Retour au sommaireSommaire :
- 2018/08/22 Robot Golbotth8 vue eclatée
- Retour au menu Vidéo
.
2018/08/22 Robot Golbotth8 vue eclatée |
.
Vue éclatée du robot Golbotth8 Rappel : Ce petit robot est destiné à vous initier à la programmation, nous l’appellerons Golbotth8. La construction de cet engin passe déjà par l’impression 3D, vous trouverez l’ensemble des fichiers STL sur notre site RedOhm ainsi que la matière que nous avons utilisée et les différents conseils techniques. Vous aurez la possibilité de suivre des tutoriels sur Arduino avec ce module. Nous avons surtout essayé de minimiser le coût de l’ensemble.
.
.
Sommaire :
- 2021/05/29 Eclatée de l’axe 2 version 1.50
- 2019/08/04 Présentation de la construction du cobot oryon
- 2019/06/09 Cobot Oryon montage de l’axe 5
- 2019/06/09 Tuto pour le cablage des moteurs pas à pas
- 2019/05/29 Cobot Oryon état 3 mise en service du segment 2
- Retour au menu Vidéo
.
.
2019/08/04 Présentation de la construction du cobot oryon |
.
Vidéo vous permettant de monter l’axe 2 du cobot Oryon et de visualiser son fonctionnement
.
Retour au sommaire
2019/08/04 Présentation de la construction du cobot oryon |
.
Video de presentation de la partie technique du cobot Oryon
.
.
Retour au sommaire.
2019/06/09 Cobot Oryon montage de l’axe 5 |
.
Voici une vidéo qui vous permet d’appréhender le montage de la tête porte outil.
.
.
Retour au sommaire.
2019/06/09 Tuto pour le cablage des moteurs pas à pas |
.
Dans ce tutoriel nous allons voir les différents types de moteurs pas à pas utilisés pour le Cobot Oryon et évidemment les drivers associés.
.
Retour au sommaire.
2019/05/29 Cobot Oryon état 3 mise en service du segment 2 |
.
L’étape numéro trois nous permet de visualiser l’ensemble de notre Cobot Oryon ( bras robotique ) . Elle nous permet aussi de mieux appréhender toutes les parties actives. Nous pouvons les décrire comme ceci ,la base sa rotation est exécutée par un moteur pas à pas. Le premier segment et le deuxième segment sont actionnés aussi par les moteurs pas à pas mais nettement plus puissants et possédant dans certains cas des freins électriques. La rotation du segment quatre est réalisée avec un servomoteur Dynamixel . La rotation du porte outil est exécutée avec un servomoteur classique de type RC ( Hitec ) . Elle permet aussi d’affirmer la qualité d’impression obtenue à l’aide des imprimantes Raise et du filament de chez ArianePlast.
.
.
Retour au sommaire.
Sommaire :
- 2018/09/12 : Maya ou un semblant de communication
- 2018/05/06 : Robot Maya modification de la mâchoire version Pro
- Retour au menu Vidéo
2018/09/12 : Maya ou un semblant de communication |
Ce tutoriel est là pour faire appréhender le début de la programmation sur le robot Maya.Nous étudierons le déplacement des servomoteurs, les manipulations des temps de pause, l’utilisation de plusieurs blocs de chez Ez-Robot, et enfin l’utilisation de la voix synthétique à des fins de communication.
.
Retour au sommaire
2018/05/06 : Robot Maya modification de la mâchoire version Pro |
.
Dans le souci d’améliorer notre robot Maya, nous avons opéré une modification sur le moteur d’élévation de la tête de Maya. Cette modification a pour but d’augmenter la durabilité du matériel sur le long terme, il va de soi que si vous utilisez notre robot à des fins ludiques ou pédagogiques cette modification n’est absolument pas nécessaire. Nous avons opté de changer le servo 805BB par un servomoteur Hitec D845 WP .La particularité de ce matériel est de pouvoir développer un couple deux fois plus élevé que le 805 BB soit 50 kg.cm sous une tension d’alimentation de 7.4 V. Vous apercevrez que pour obtenir le couple maximal, il faudra modifier le câblage électrique pour récupérer la tension d’alimentation nominale. Vous trouverez dans l’article le schéma électrique modifié pour que vous puissiez exécuter cette amélioration ( folio-Pro-100 ) L’ensemble des informations sur le robot Maya sur notre site
.
Retour au sommaire
Mise à jour le 28/12/2019 : Dans cette page nous allons étudier la modification de l’avant-bras qui a pour but de supprimer les fils qui partent du torse de Maya et qui parcourt les bras du robot. La solution retenue est l’utilisation du contrôleur de robot EZ-B IoTiny.