.
Mise à jour de la page le 07/08/2025
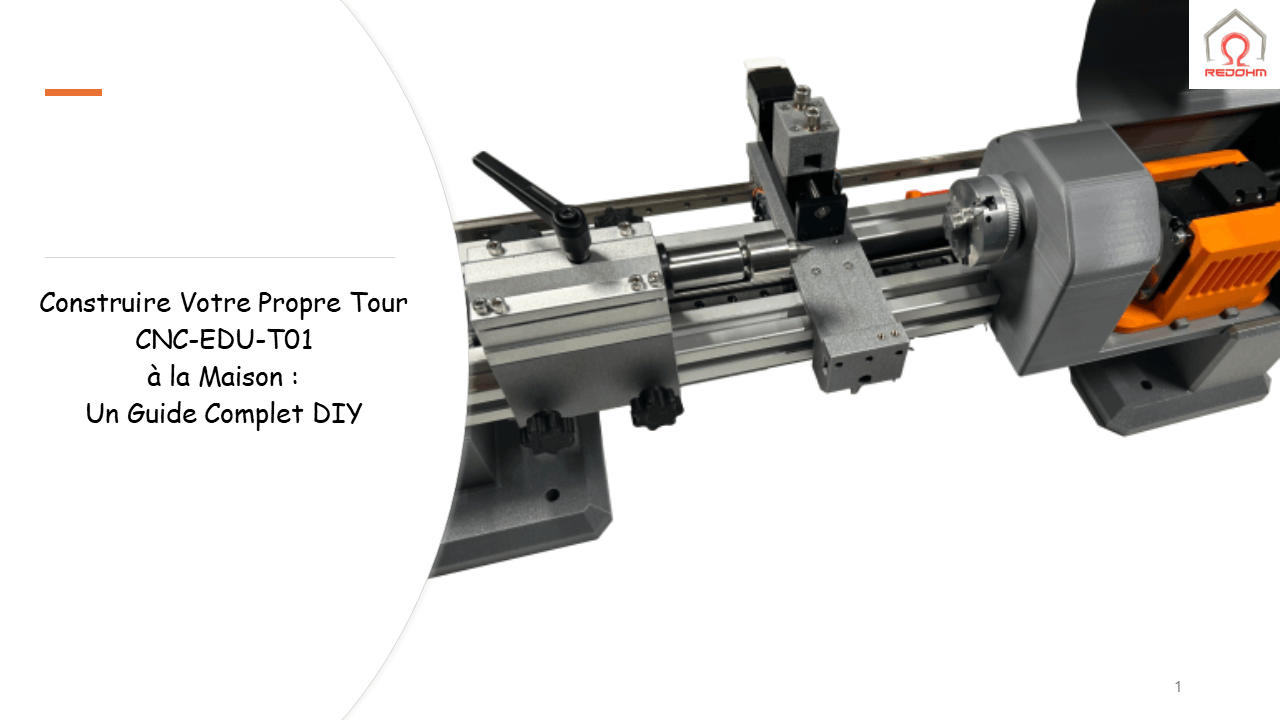
Construire Votre Propre Tour CNC-EDU-T01 à la Maison :
Un Guide Complet DIY
Suite à une demande concernant le fichier Excel des pièces nécessaires à la création du Tour, nous avons décidé d’inclure ce fichier directement dans la section Téléchargements.
Bienvenue sur RedOhm ! Dans cette vidéo, nous vous proposons un guide complet pour créer votre propre tour CNC, entièrement personnalisable et éducatif. À partir de pièces disponibles en ligne et d’éléments imprimés en 3D, vous apprendrez à assembler et programmer ce prototype modulaire. Que vous souhaitiez utiliser des contrôleurs CNC traditionnels ou une carte Arduino, ce projet est conçu pour s’adapter à vos besoins. Suivez nos tutoriels pour maîtriser le contrôle de moteurs pas à pas et plongez dans l’univers de la commande numérique. Ce modèle porte la référence CNC-EDU-T01, conçu spécialement pour l’apprentissage.
Nous discuterons également des matériaux utilisés, comme le PLA, et des techniques pour maximiser la précision tout en minimisant la consommation de filament.
Tout ce qu’il faut savoir sur le PLA Ingeo 3D870 : Caractéristiques, Avantages et Utilisation
Le PLA Ingeo 3D870 est un bioplastique de haute performance ,conçu spécifiquement pour l’impression 3D. Ce filament se distingue par sa résistance accrue à la chaleur et sa robustesse supérieure par rapport aux PLA standards et HD. La plage de température recommandée pour l’impression se situe entre 210 et 230°C. À ces températures, le PLA Ingeo 3D870 offre une excellente adhérence intercouche, ce qui se traduit par des pièces imprimées d’une grande solidité et durabilité. De plus, il se caractérise par un rendu esthétique supérieur, avec des couleurs vives et uniformes, même sur des impressions complexes.
Le PLA Ingeo 3D870 est également optimisé pour l’impression à haute vitesse. Des tests ont démontré qu’il est capable de maintenir une qualité d’impression exceptionnelle, même à des vitesses aussi élevées que 140 mm/s. Les détails fins sont restitués avec une précision remarquable, ce qui fait de ce filament un choix privilégié pour des projets nécessitant à la fois rapidité et qualité.
En outre, ce grade de PLA peut être recuit pour améliorer encore ses propriétés mécaniques. Après recuisson, le PLA Ingeo 3D870 devient résistant à des températures allant jusqu’à 85°C, et offre une meilleure résistance aux chocs, à la torsion, à la pression, et à l’étirement. Cette capacité à être recuit permet d’obtenir des pièces plus robustes et adaptées à des environnements exigeants.
Cependant, la recuisson du PLA Ingeo 3D870 doit être effectuée avec précaution. Ce processus, réservé aux makers avertis, nécessite une bonne connaissance des paramètres de recuisson pour éviter toute déformation ou perte de stabilité dimensionnelle. La recuisson doit se faire dans un four avec un contrôle précis de la température pour s’assurer que le filament ne dépasse jamais son point de cristallisation, moment critique où il commence à se déformer.
![]()
Manivelles pour mini-tour CNC : la sensation du manuel avec la précision numérique ( Vidéo 1)
Vous travaillez avec un mini-tour CNC et cherchez à retrouver la sensation d’un pilotage manuel tout en conservant la précision numérique ? Cette vidéo est faite pour vous !
Dans cet épisode, nous vous présentons une solution hybride innovante : l’ajout de manivelles intelligentes équipées de capteurs angulaires AS5600 et pilotées par Arduino Nano. Ce système permet de manipuler votre machine avec la fluidité d’un tour traditionnel… mais avec toute la rigueur d’un contrôle numérique.
![]()
Pour tout problème de téléchargement ou pour nous suivre sur les réseaux sociaux voici les plateformes sur lesquelles nous éditons.
Cliquez sur celles qui vous intéressent .