–
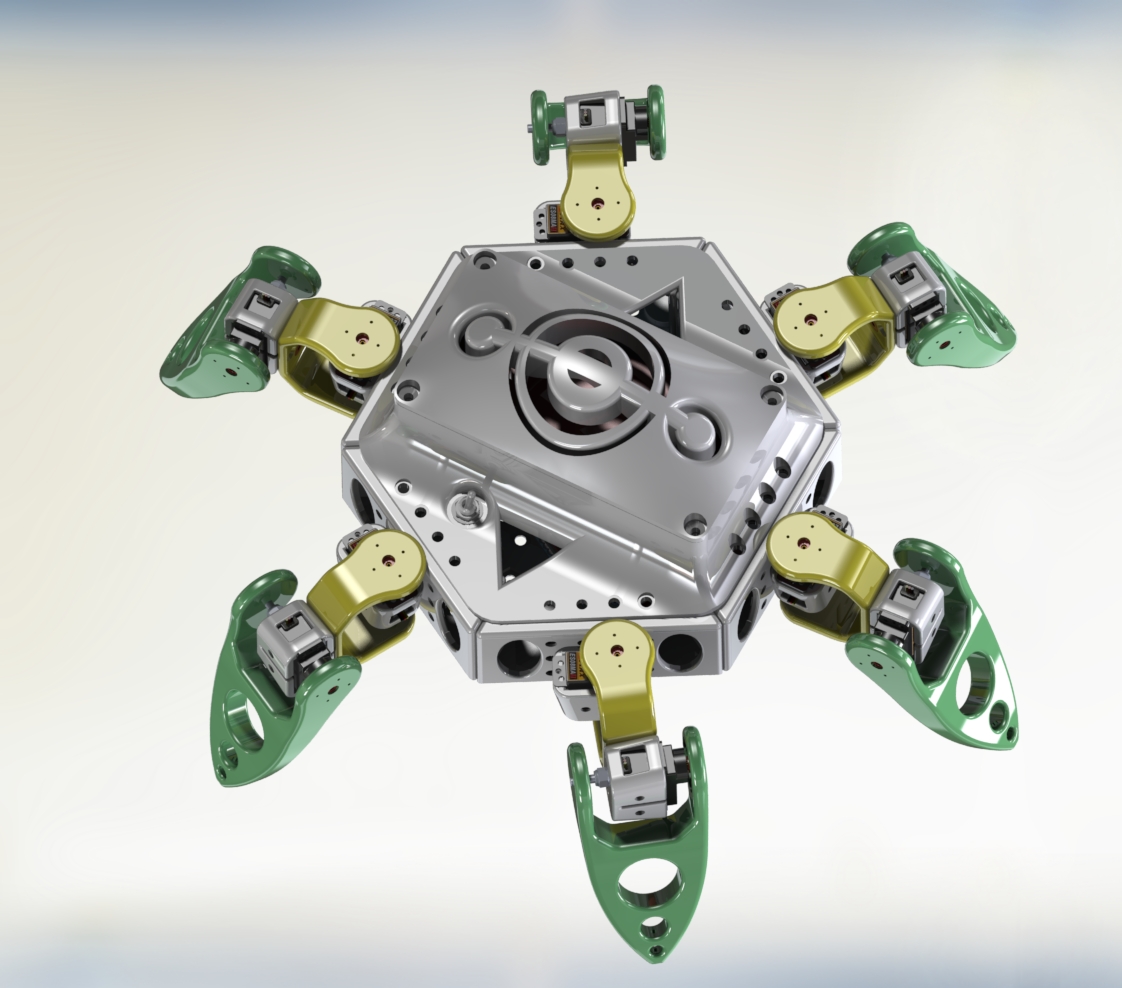
Mise à jour 16/06/2019 . Retrouvez sur cette page l’ensemble des articles concernant le robot Maya ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )

Mise à jour 16/06/2019 . Retrouvez sur cette page l’ensemble des articles concernant le robot Maya ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )
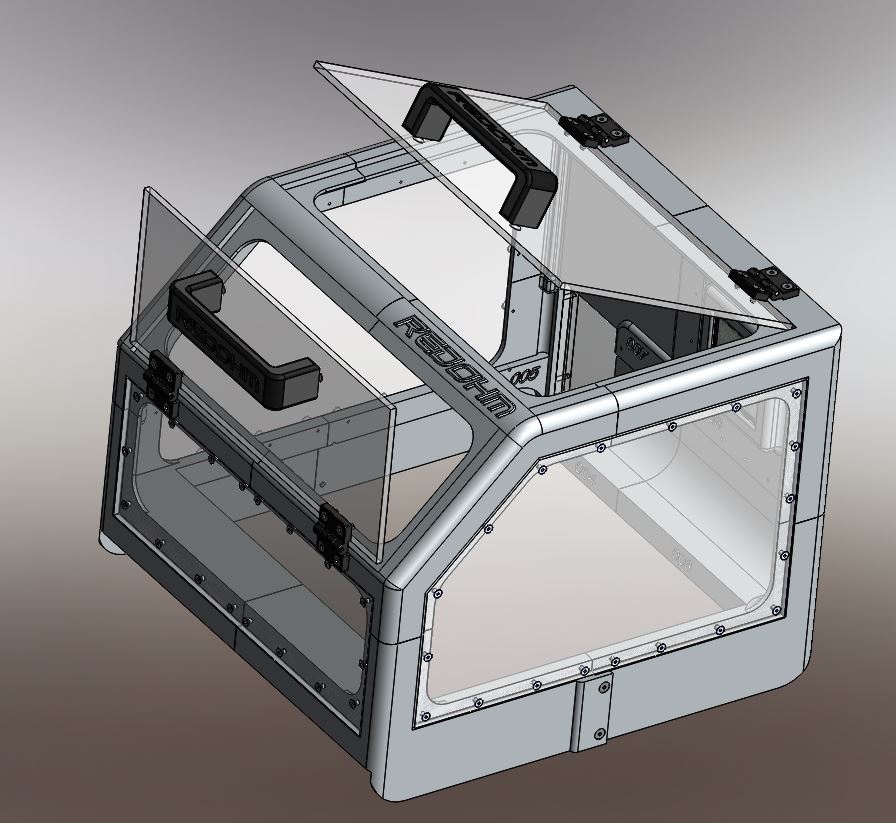
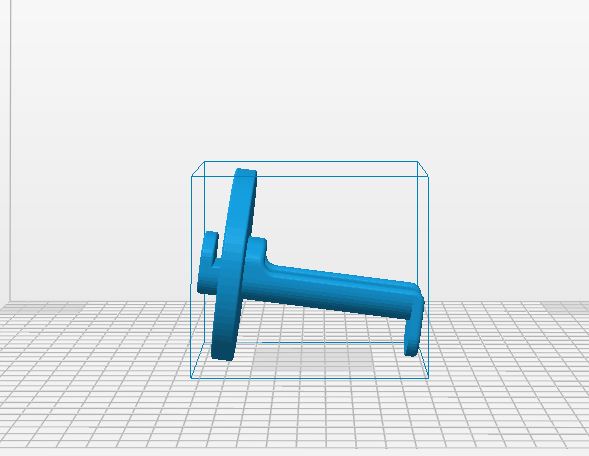
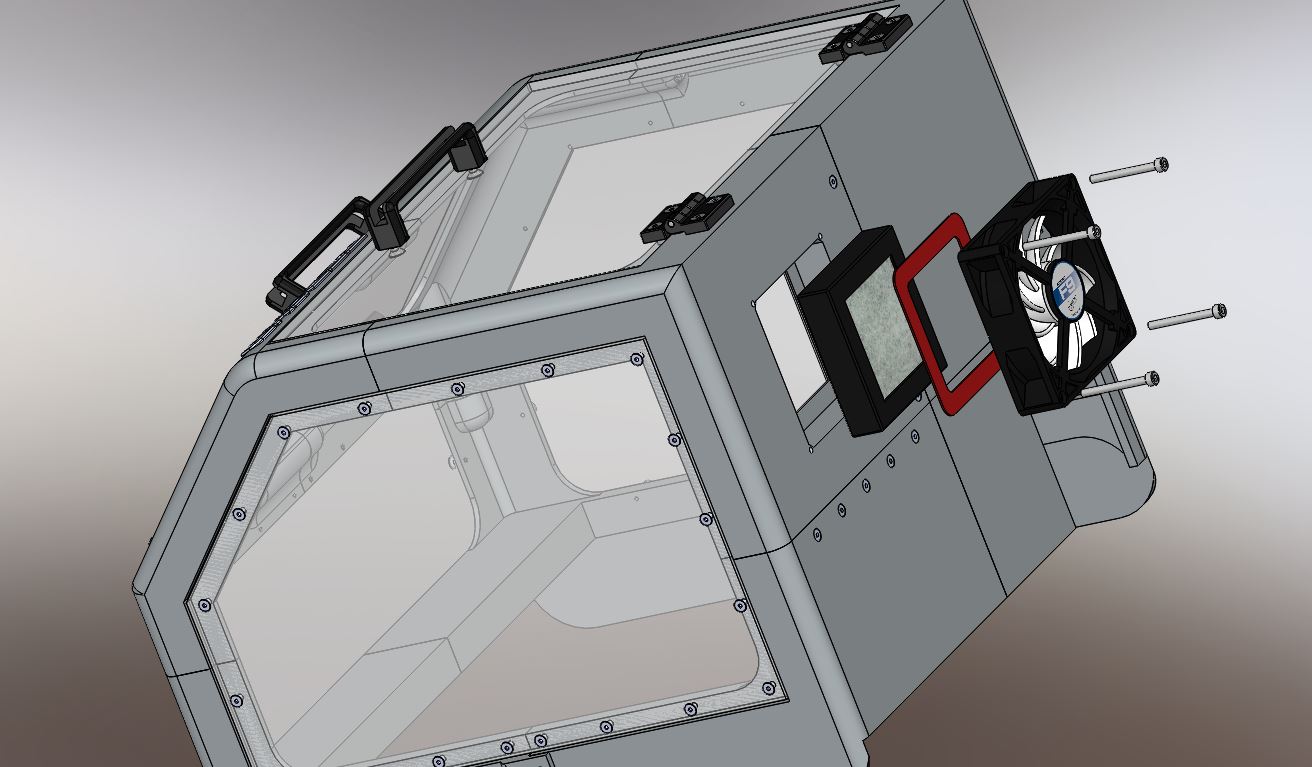
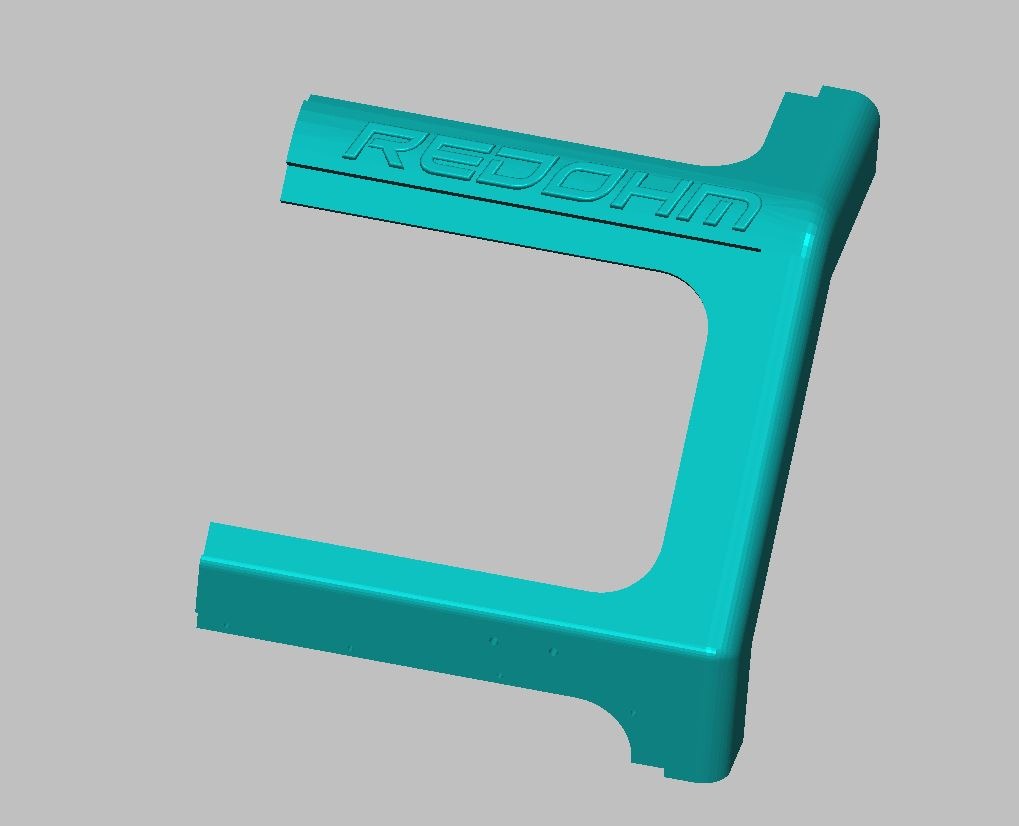
Mise à jour le 08/01/2018.Grâce a ce capot pour l’imprimante Zortrax M200 , il est beaucoup plus facile d’imprimer des matières comme l’ABS qui ont tendance à subir le choc thermique entre la température environnante et la chaleur du plateau , de plus il saura maintenir la température intérieure de votre imprimante 3D. Il protégera vos impressions des aléas extérieurs comme par exemple les courants d’air, poussières ect..
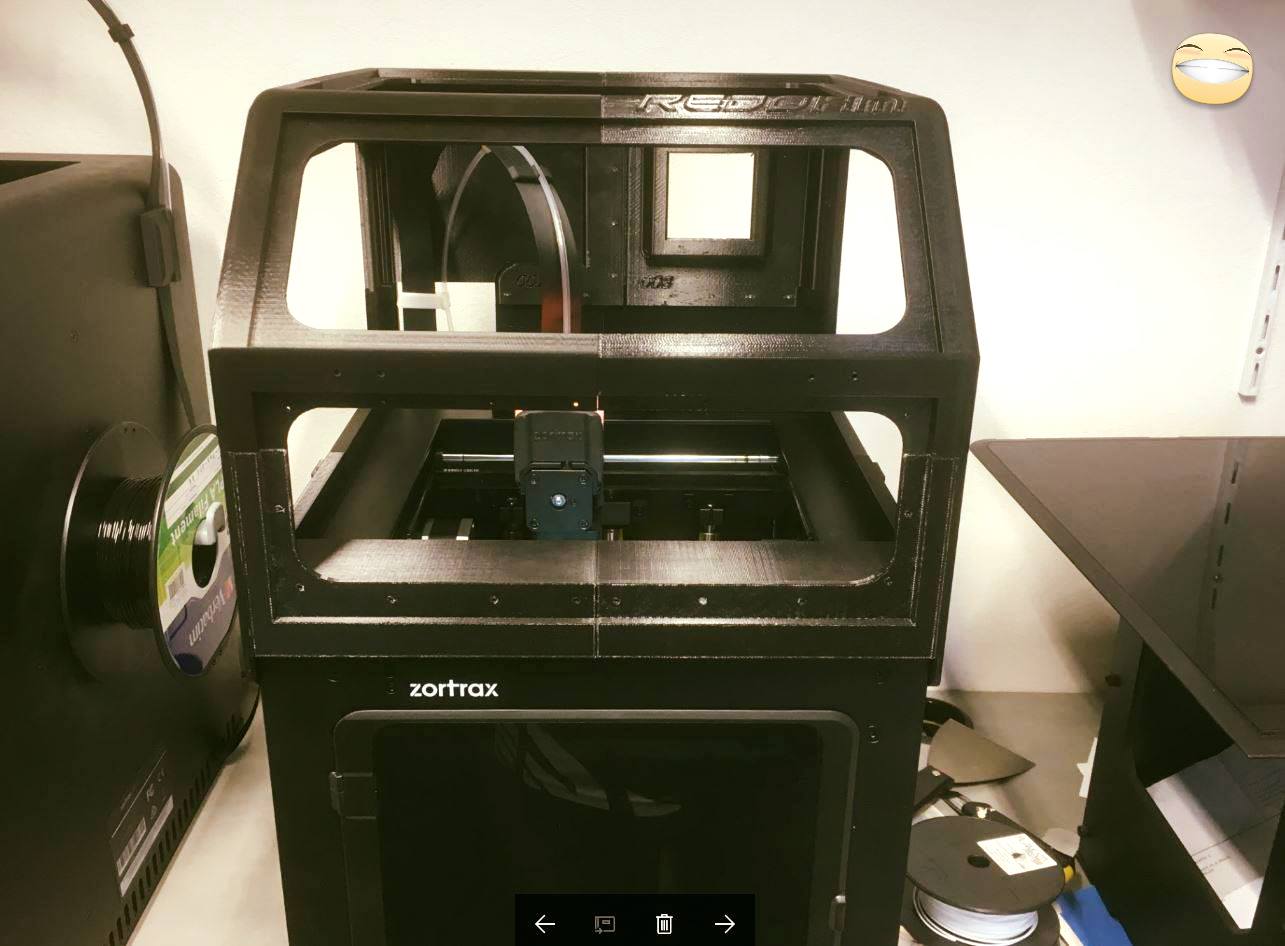
Capot pour Zortrax M200 – RedOhm
![]()
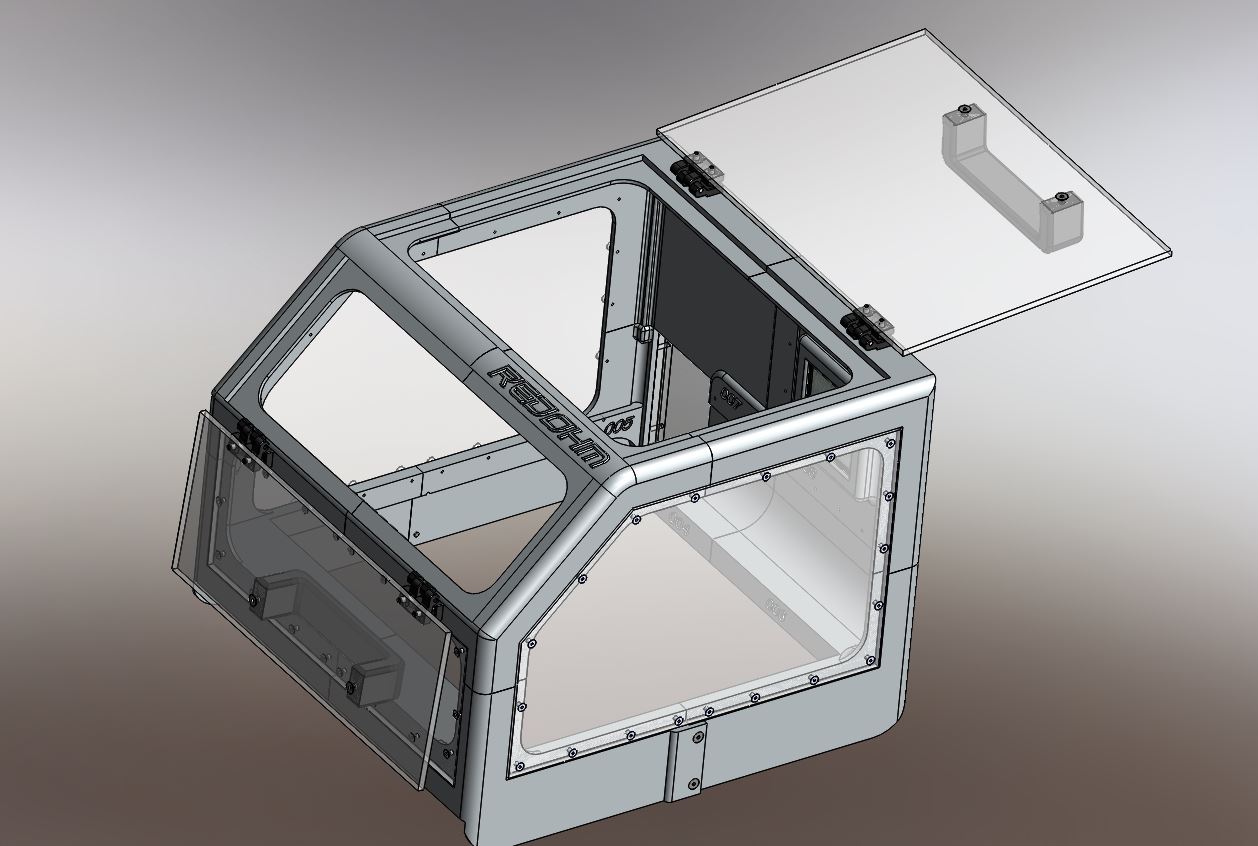
Présentation du capot pour Zortrax M200 |
Grâce a ce capot , il est beaucoup plus facile d’imprimer des matières comme l’ABS qui ont tendance à subir le choc thermique entre la température environnante et la chaleur du plateau , de plus il saura maintenir la température intérieure de votre imprimante 3D. Il protégera vos impressions des aléas extérieurs comme par exemple les courants d’air, poussières ect..
Sécurité :
Dans un contexte public comme les fablab par exemple, ce capot permet une utilisation sécurisée et sans risque et de plus atténuera les éventuelles nuisances sonores .
Le capot est muni filtre contre les micro-particules.
A savoir sur les risques des micro-particule
Les chercheurs ont testé deux matériaux d’impression 3D différentes, l’ABS (acrylonitrile butadiene styrene) et le PLA (polylactic acid), pour voir combien de particules fines sont émises à chaque réalisation. Ils ont constaté que l’ABS émet 10 fois plus de particules que le PLA. L’étude met en garde contre les imprimantes d’entrée de gamme qui impriment à la fois en ABS et PLA. Elle prend l’exemple de la xxx xxxxx qui coûte 800 euros et de ses instructions liées à la sécurité. « Le PLA est un matériau sûr et non toxique, il n’y a pas de risques connus sur la santé lorsqu’il est utilisé dans les imprimantes 3D », peut-on lire sur la notice et d’ajouter « lors de l’impression avec l’ABS, il y a une odeur de plastique brûlé. C’est tout à fait normal, mais il peut aussi causer des maux de têtes, une irritation des voies respiratoires et des yeux pour les personnes sensibles ». Brent Stephens indique que plusieurs études ont montré que les fumées d’ABS étaient toxiques sur les souris et les rats.
Articles qui traite sur le sujet :
⇒ le monde informatique
⇒ Prévention du risque chimique Cnrs
⇒ Sciences et avenir : L’impression 3D est elle dangereuse pour la santé
| Retour au sommaire |
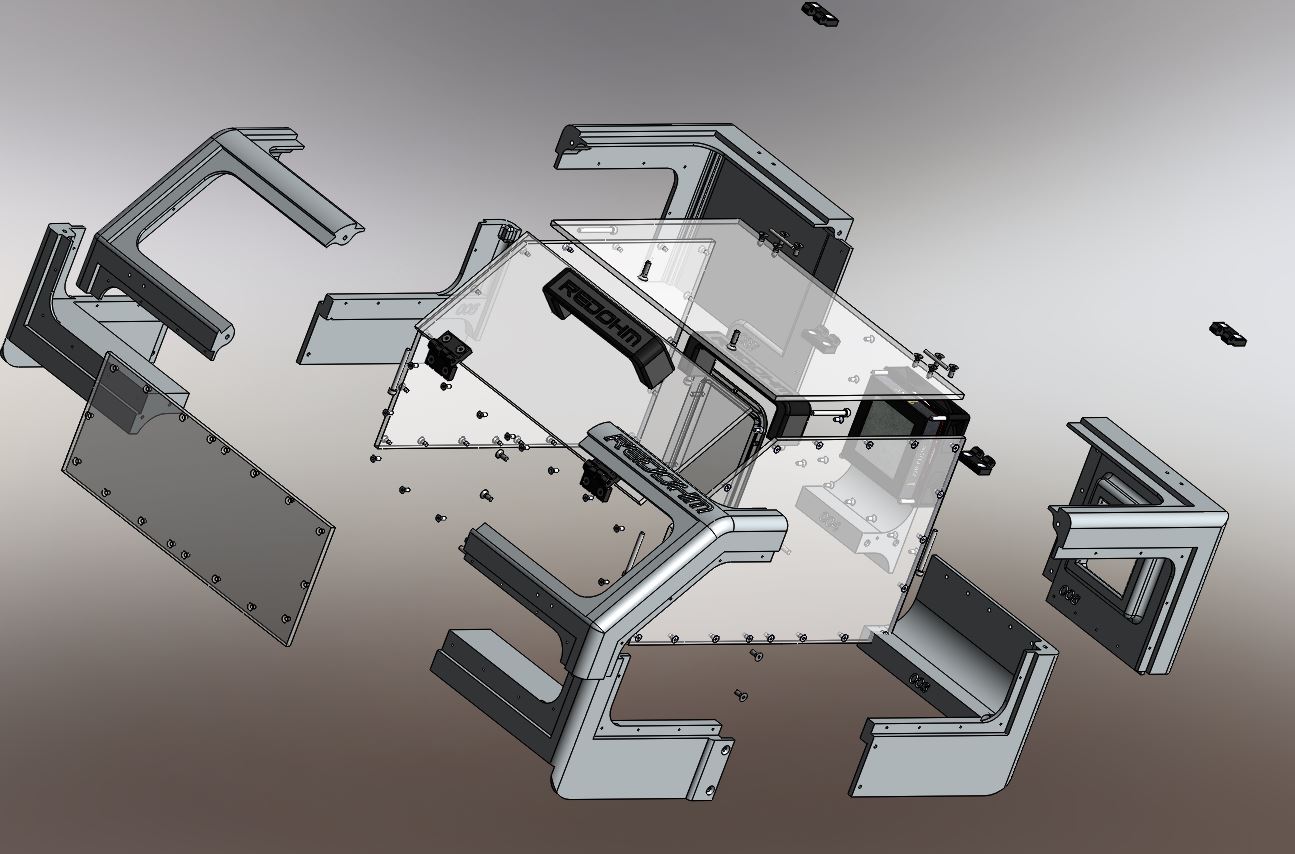
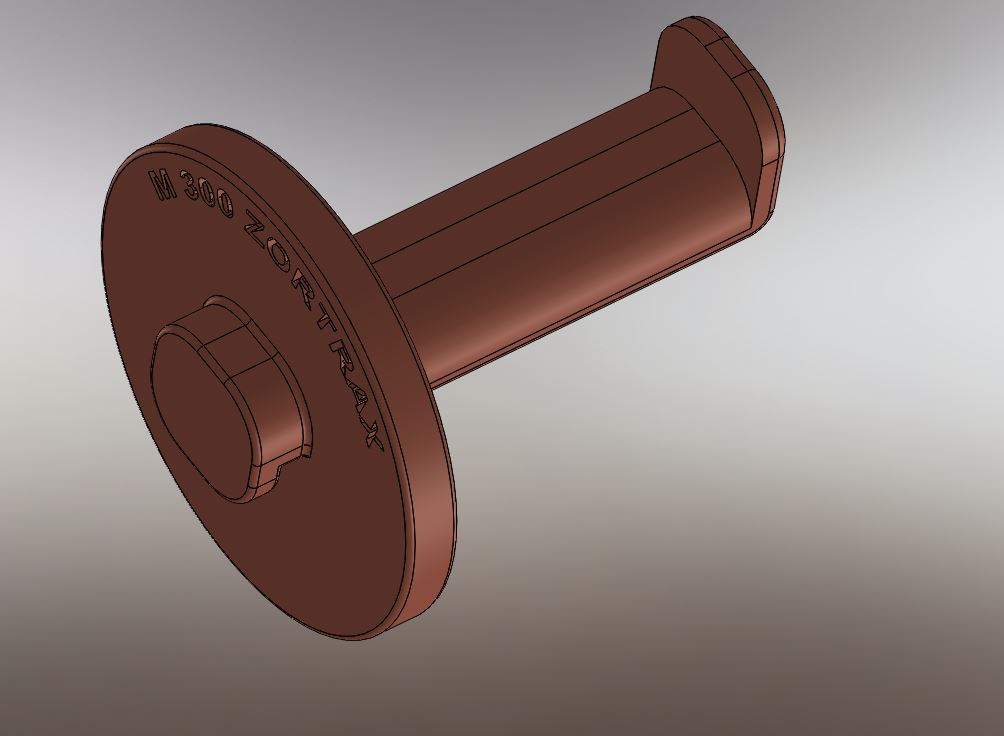
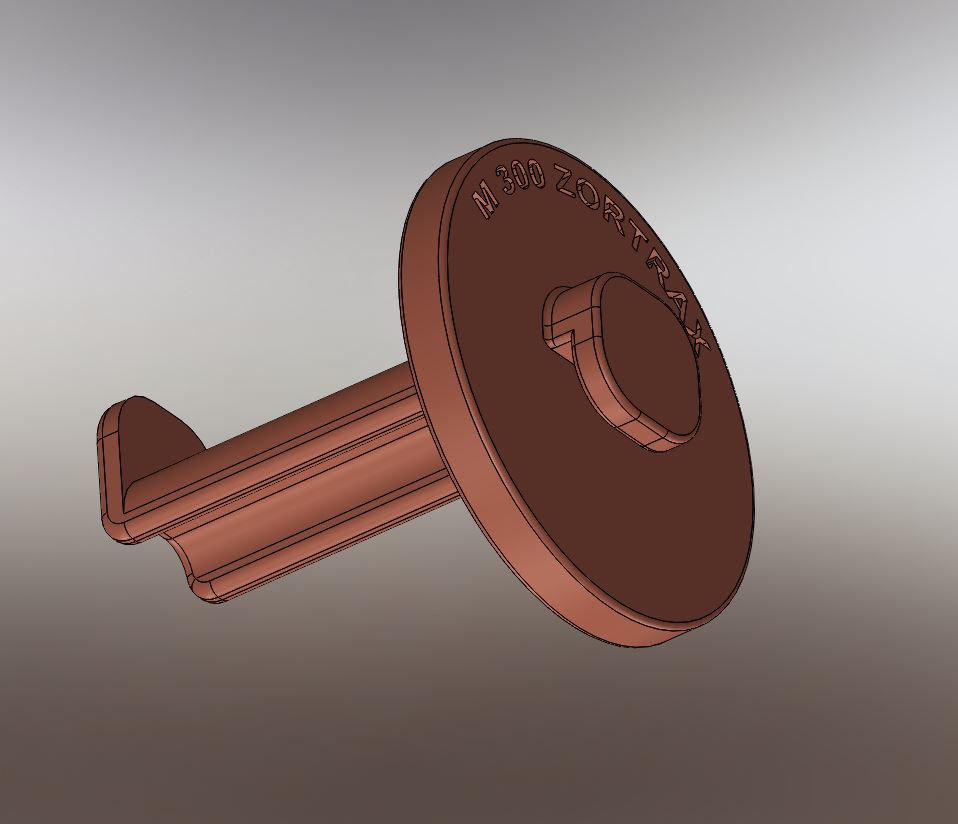
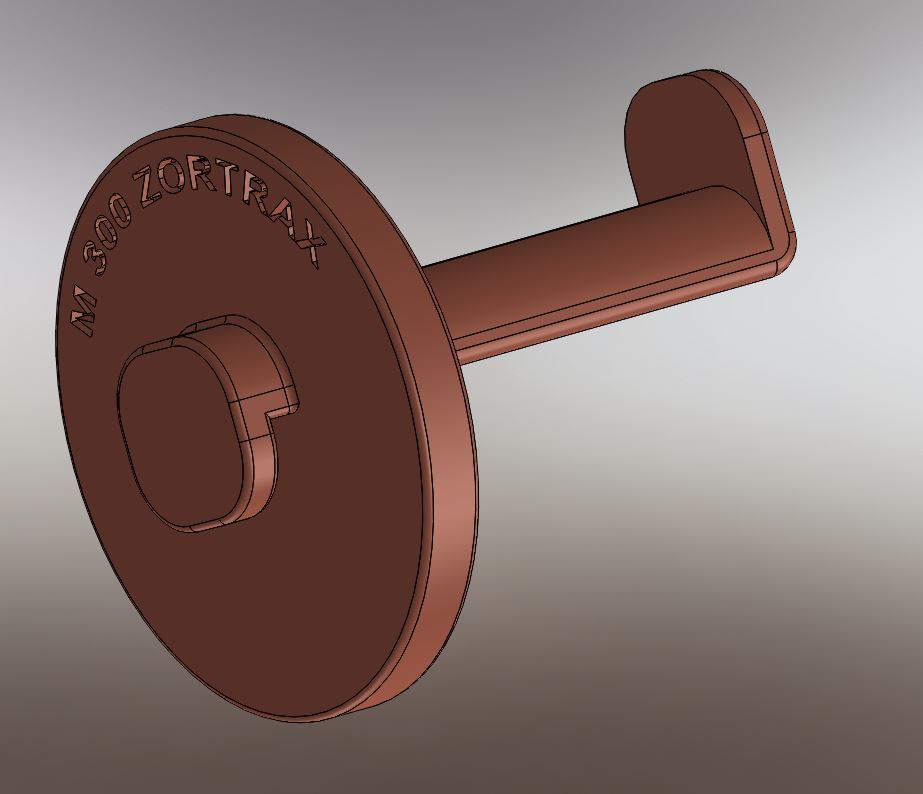
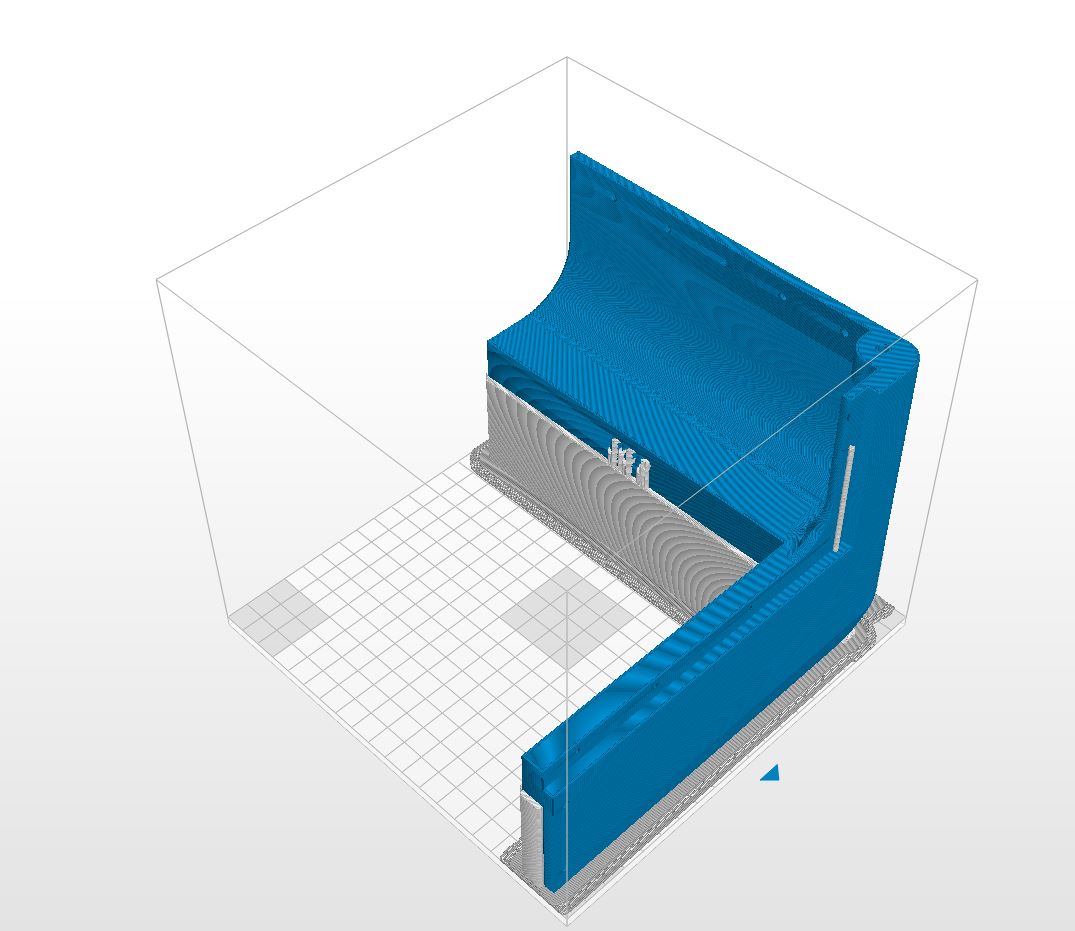
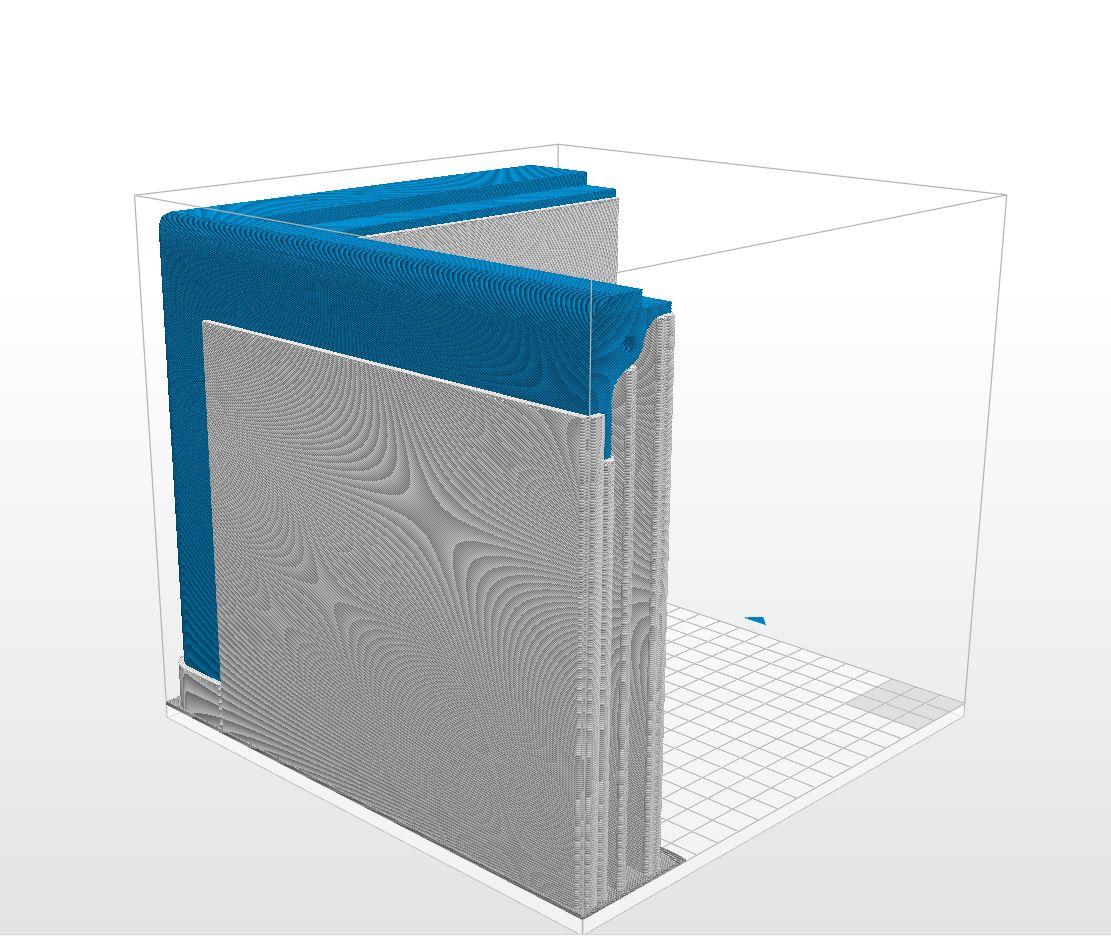
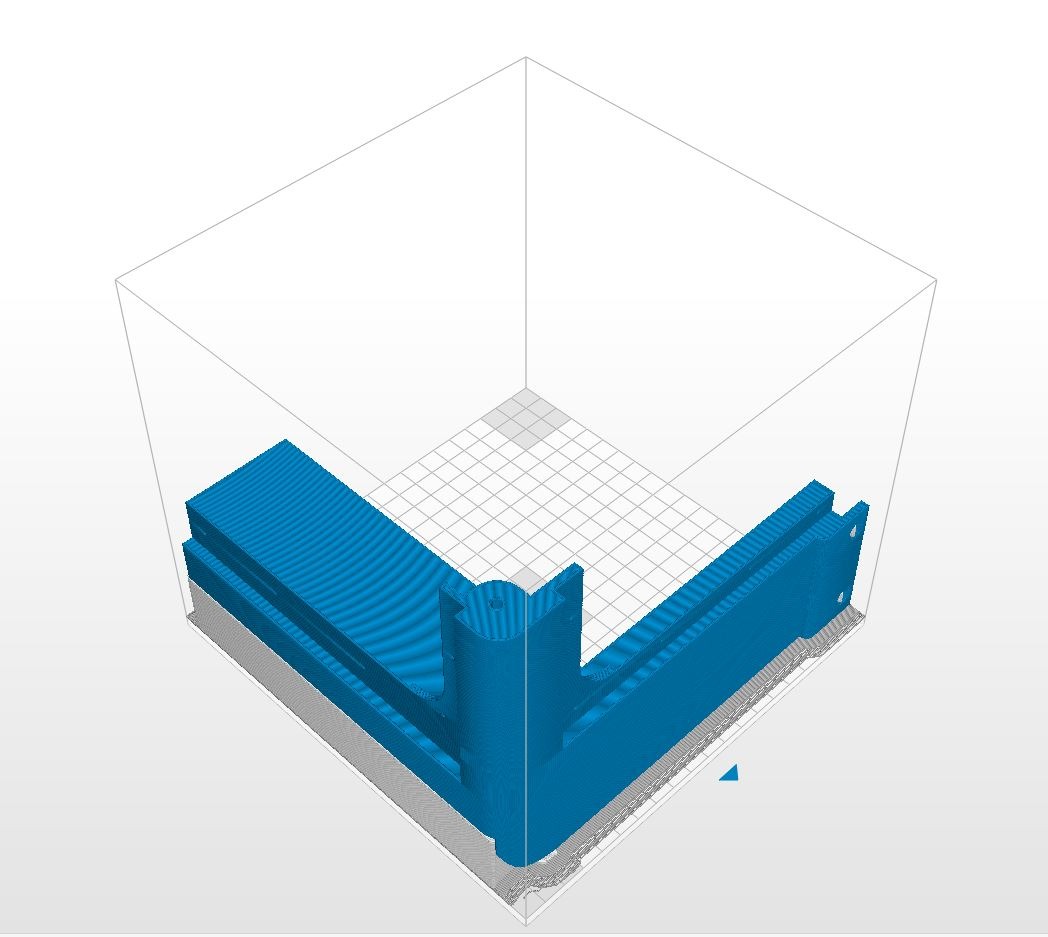
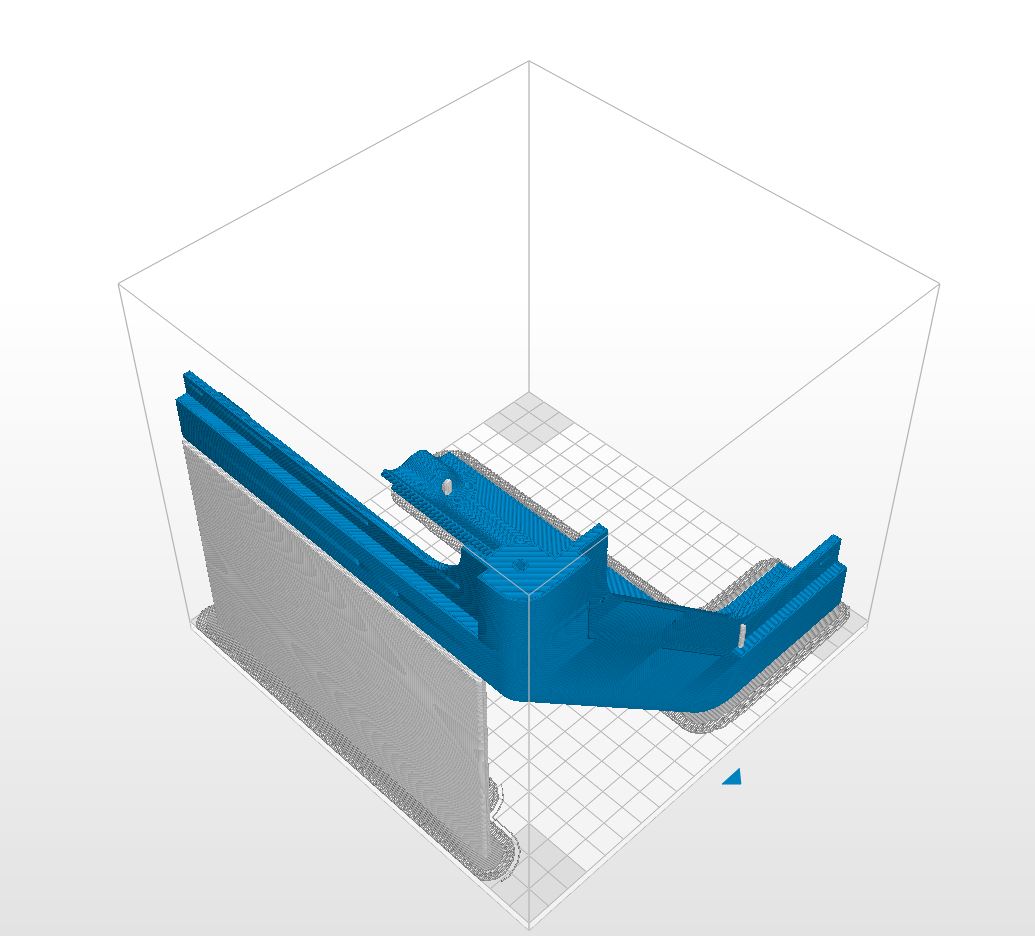
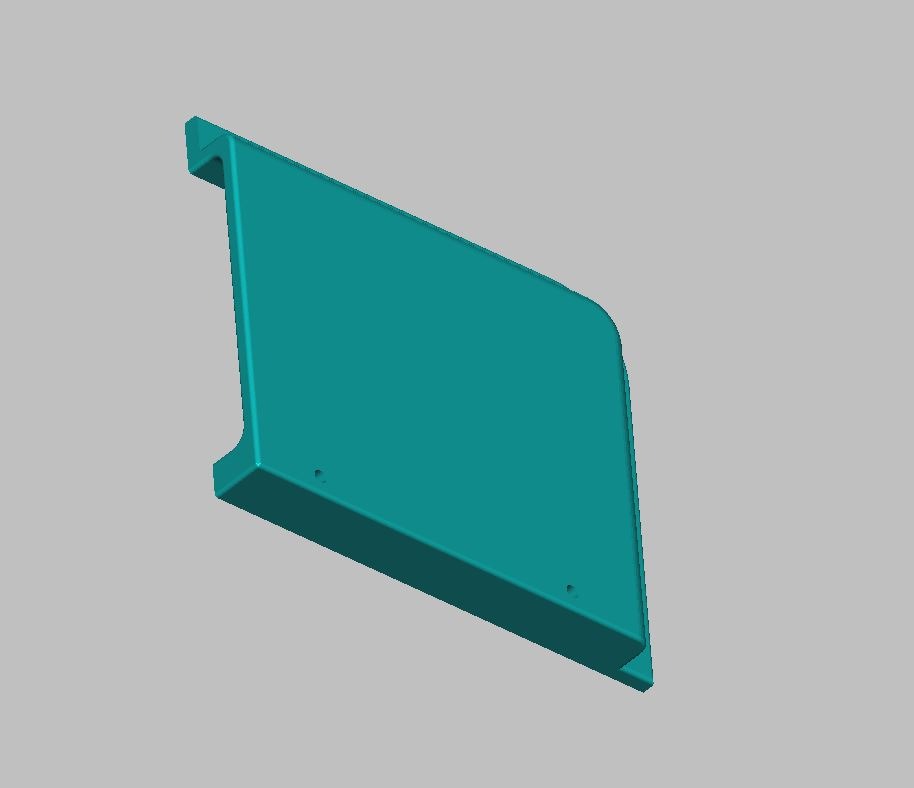
![]()
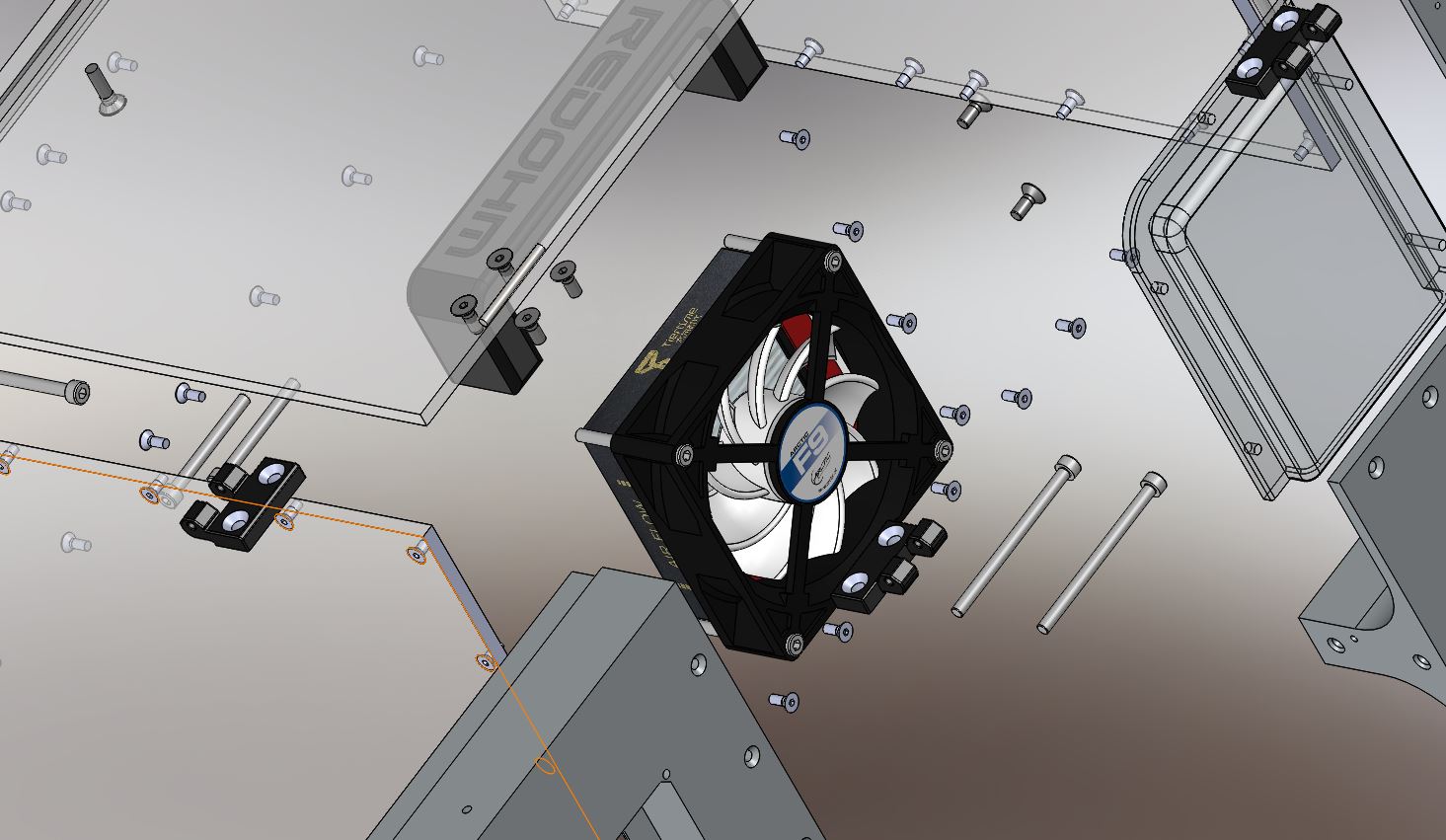
Vue éclatée du capot pour la Zortrax M200 |
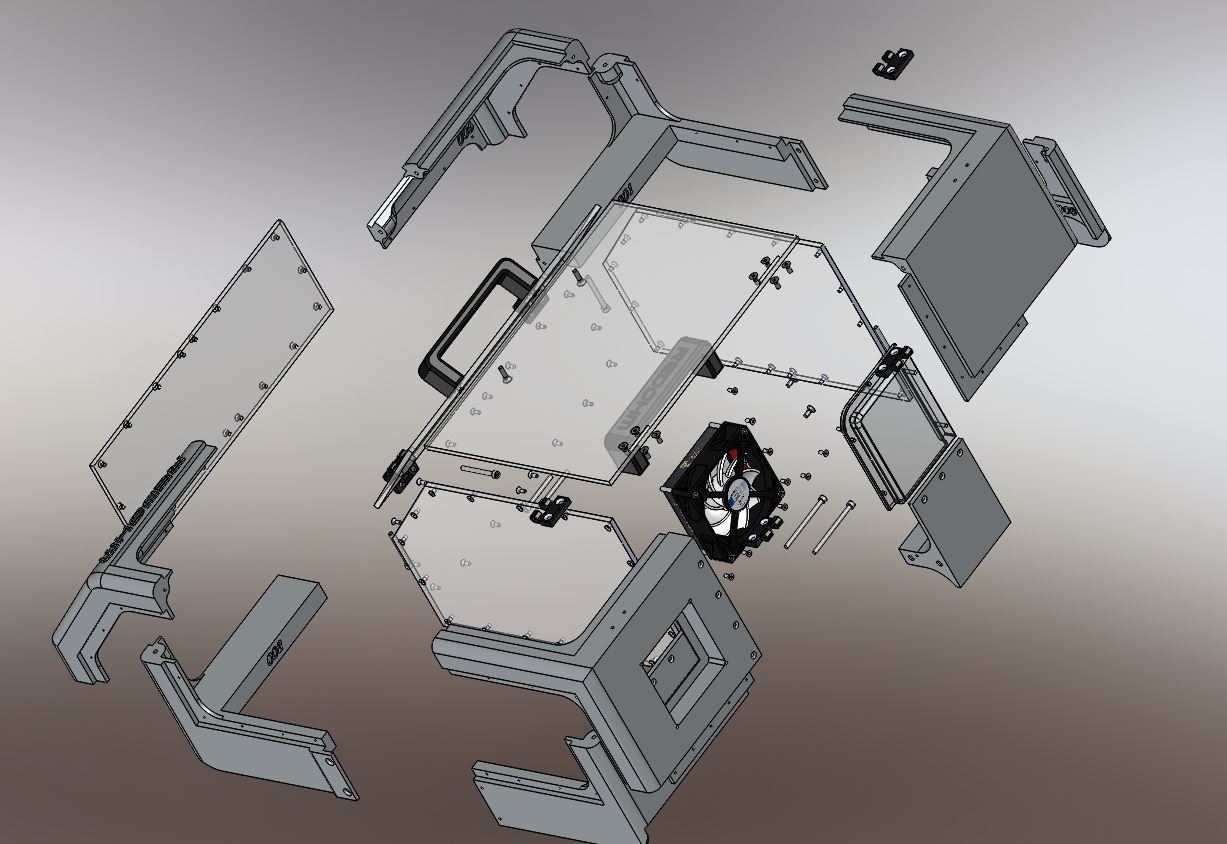
Vue éclatée du capot pour l’imprimante Zortrax M200 RedOhm fig 01
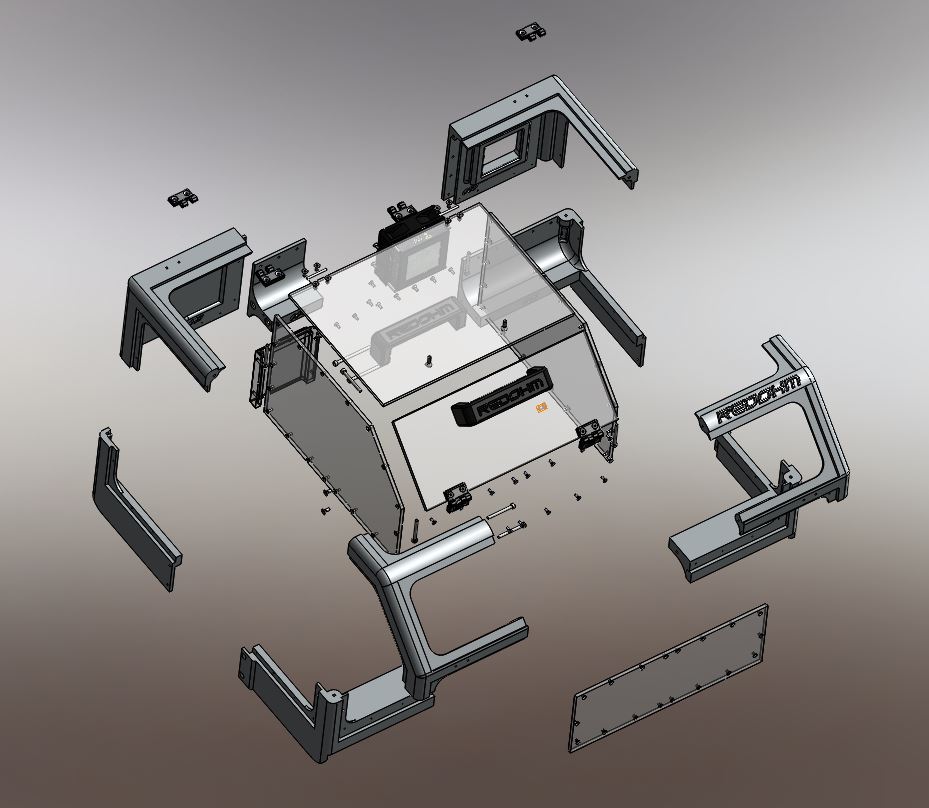
Vue éclatée du capot pour l’imprimante Zortrax M200 RedOhm fig 02
Vue éclatée du capot pour l’imprimante Zortrax M200 RedOhm fig 03
| Retour au sommaire |
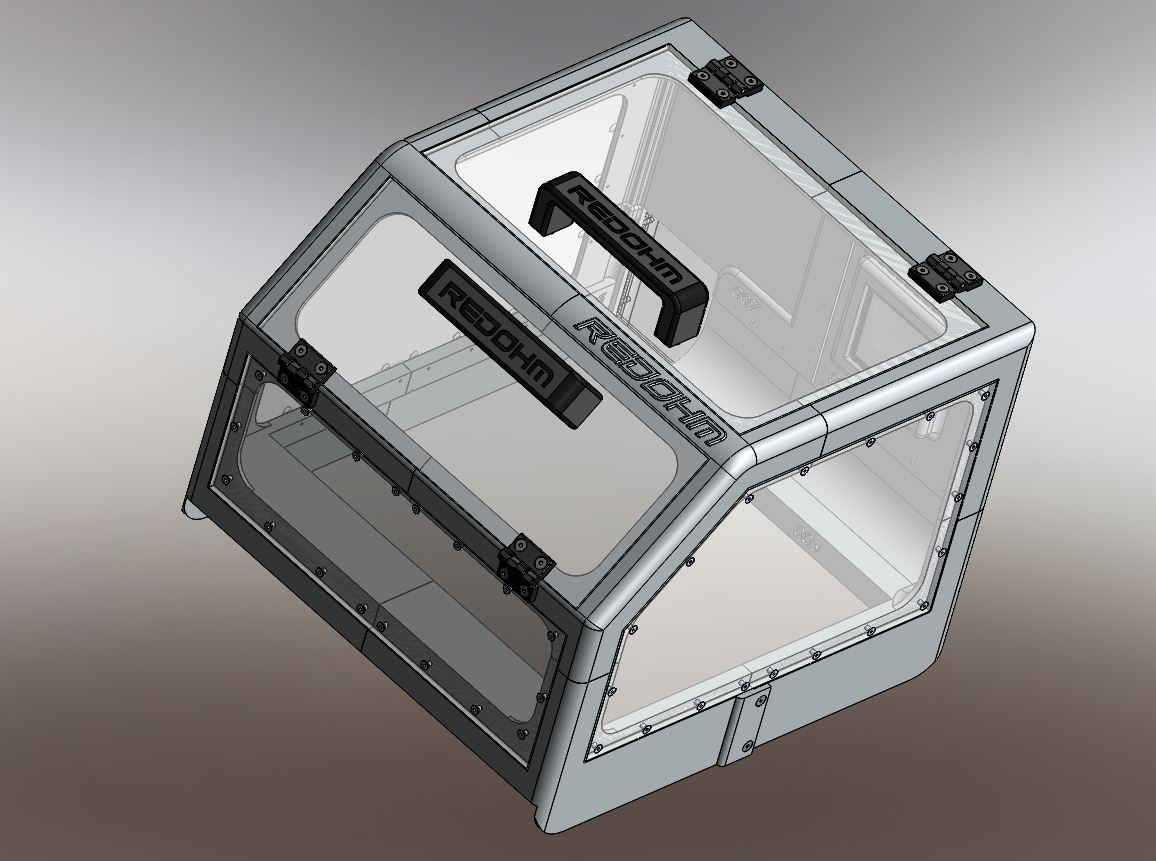
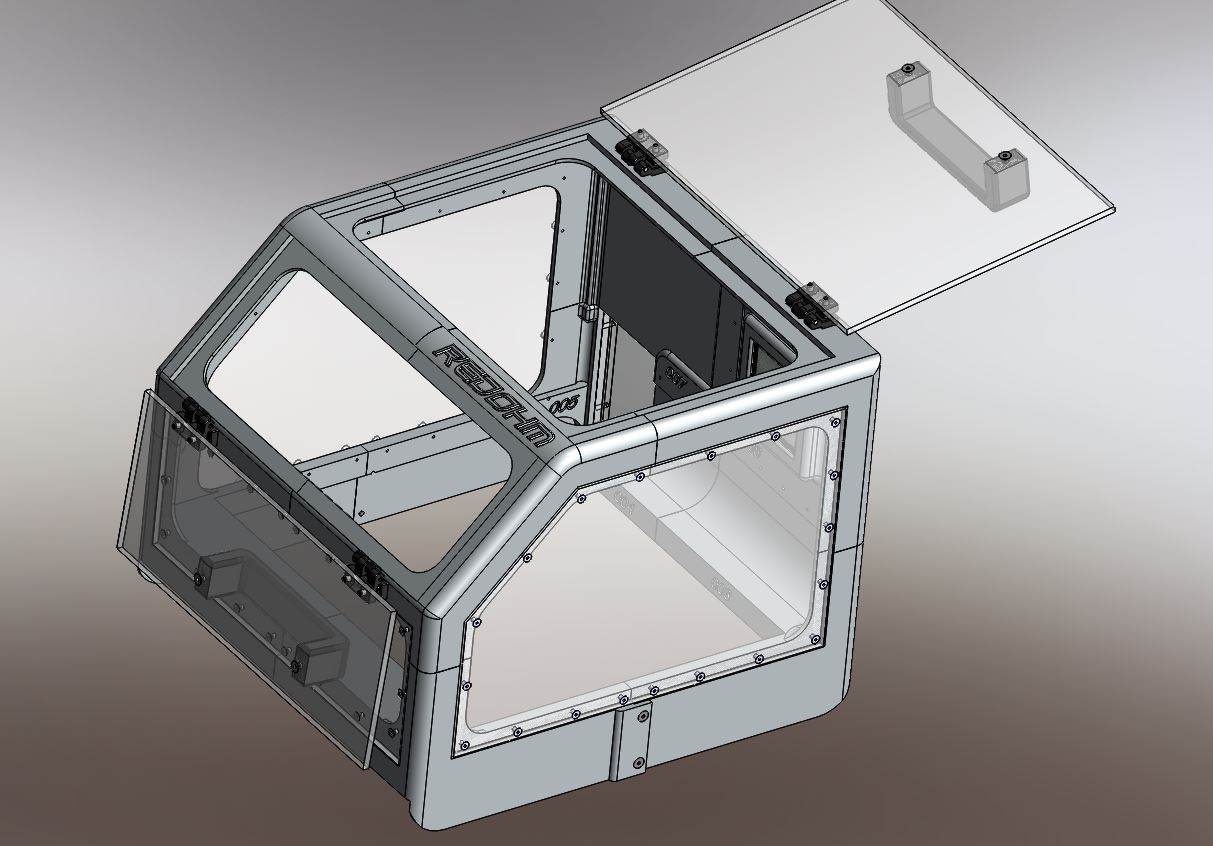
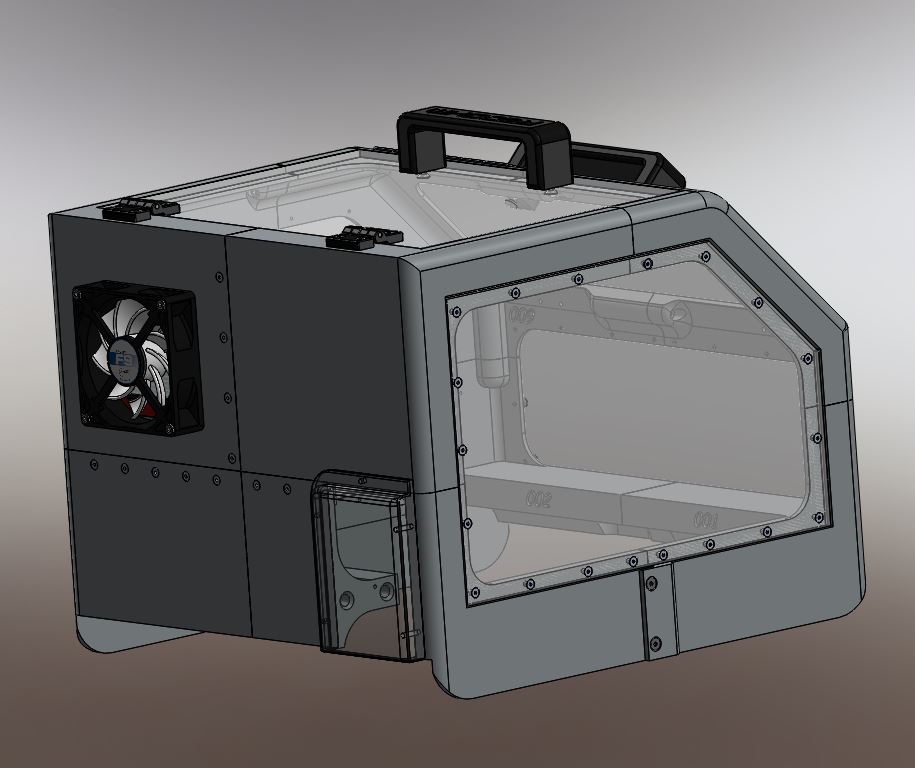
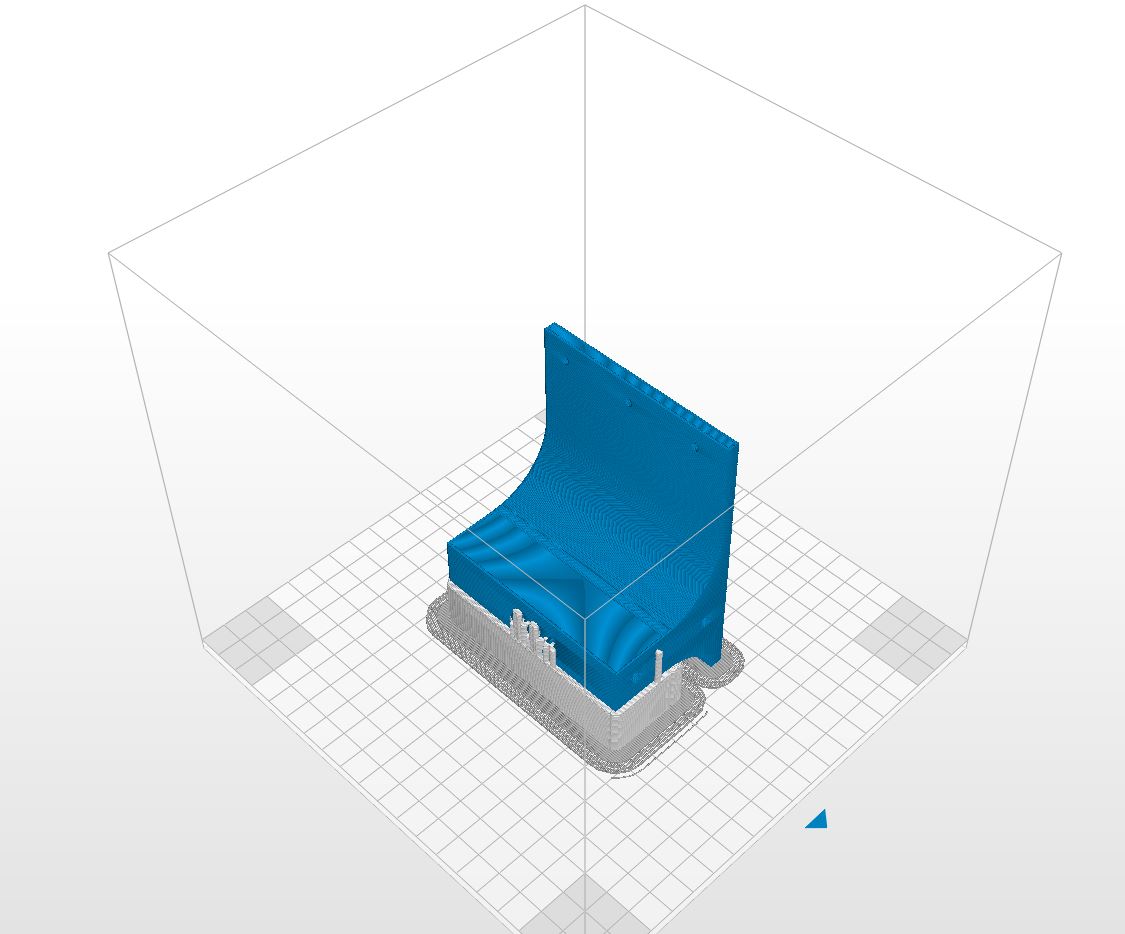
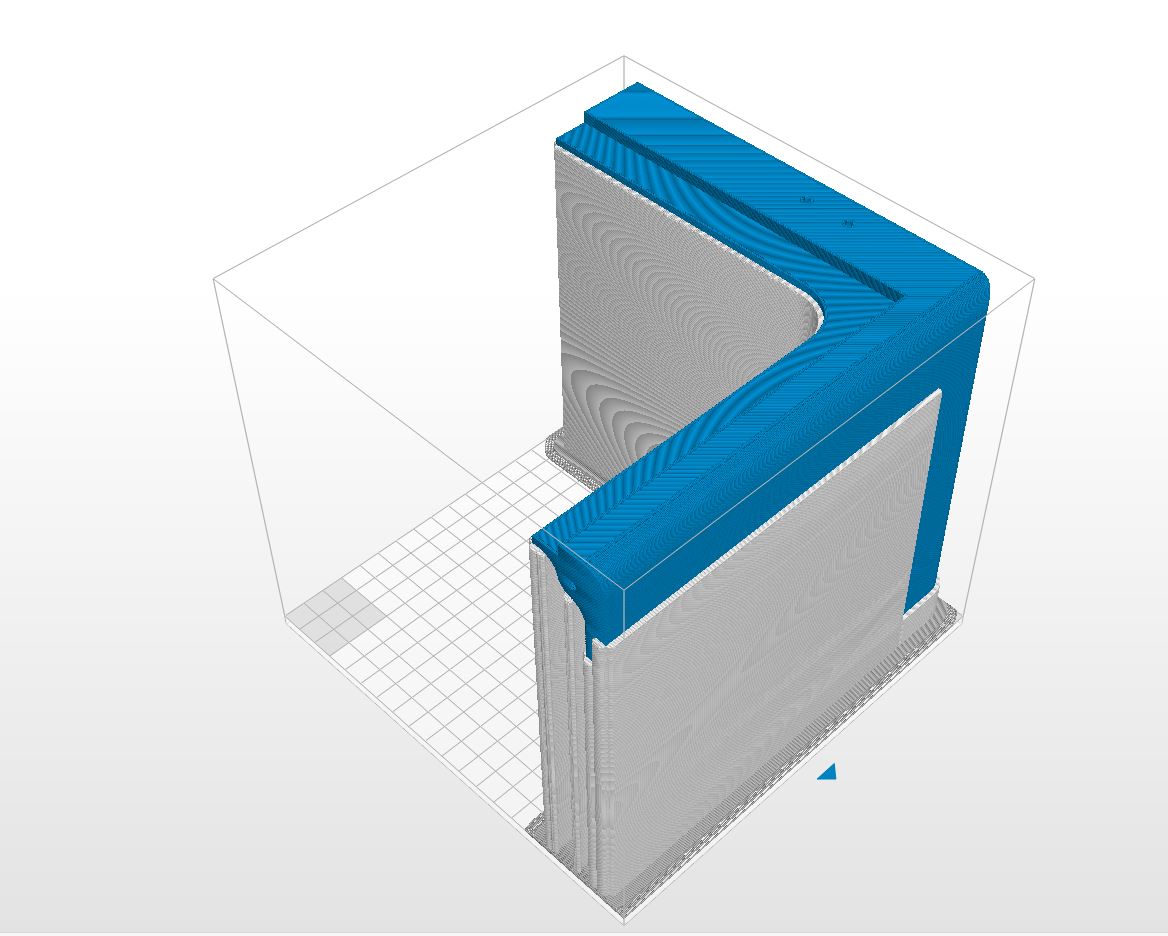
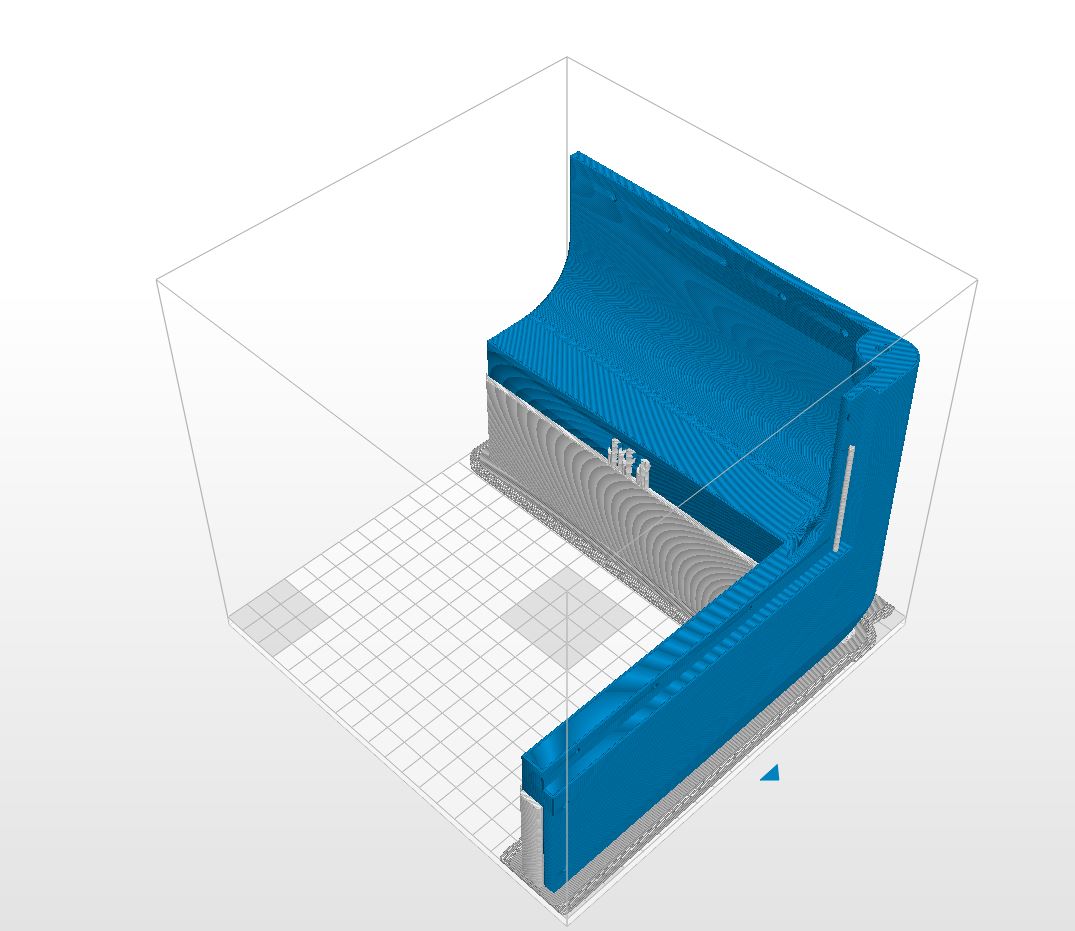
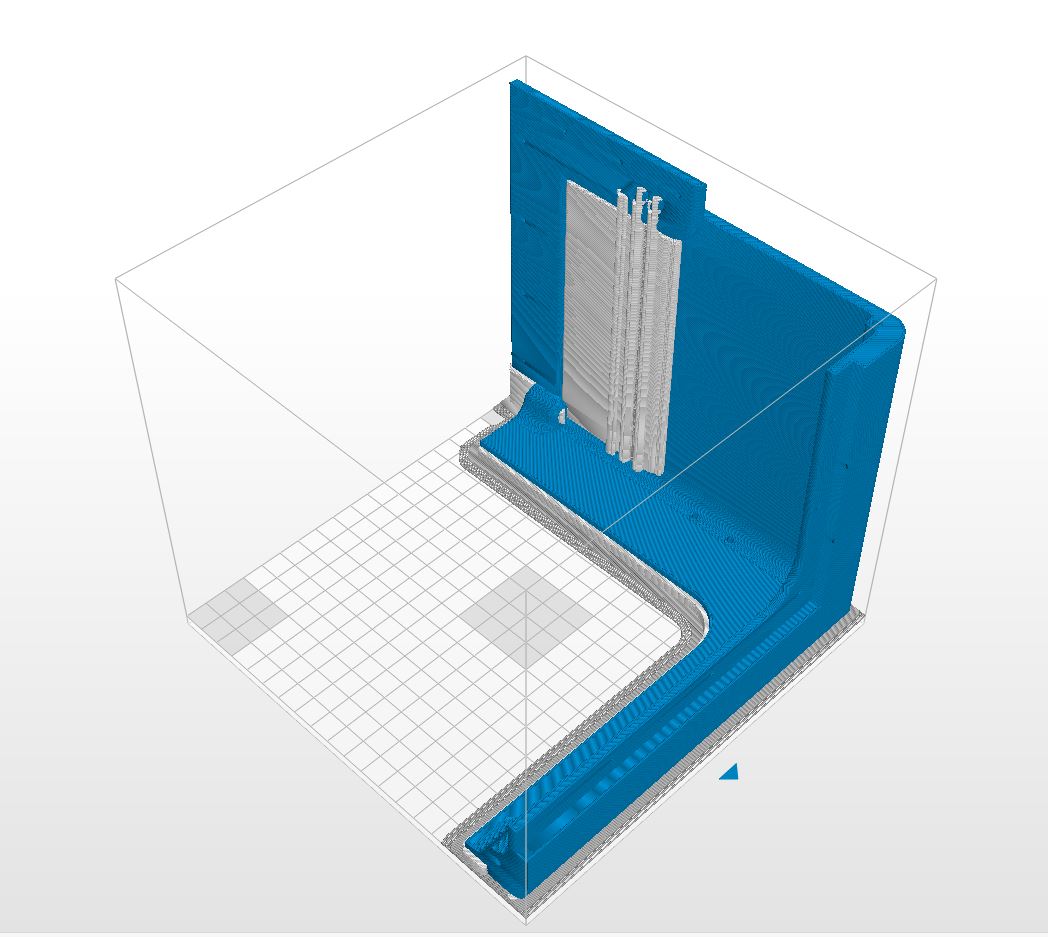
![]()
Différentes vue du capotage de l’imprimante Zortrax M200
|
| Retour au sommaire |
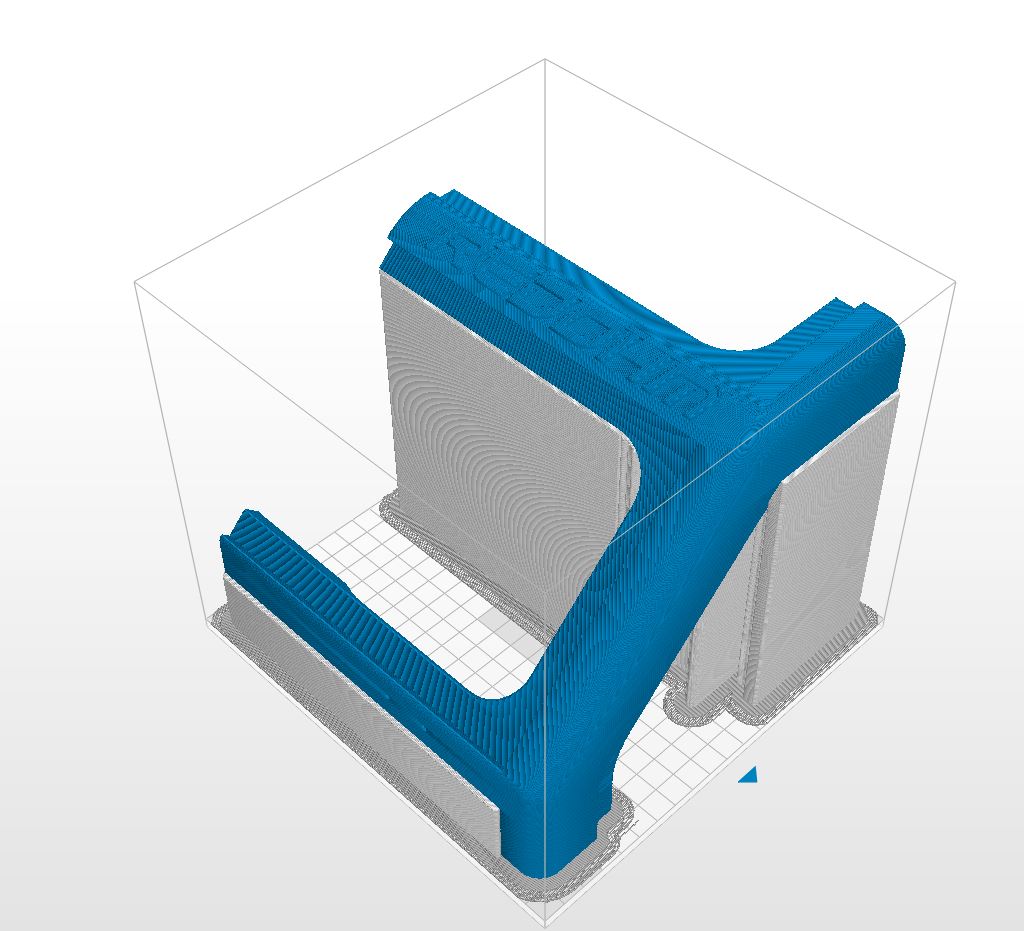
![]()
Impression avec du filament PLA standard
|
Caractéristique des pièces du capot Zortrax M200
|
| Pièces | Taille X en mm |
Taille Y en mm |
Taille Z en mm |
Poids en g | Temps estimé |
| 001 | 199 | 183 | 140 | 383g | 31h |
| 002 | 199 | 183 | 140 | 359g | 31h |
| 003 | 193 | 179 | 140 | 418g | 36h30 |
| 004 | 55 | 84 | 110 | 125g | 11h |
| 005 | 143 | 140 | 140 | 137g | 13h20 |
| 006 | 185 | 179 | 158 | 462g | 46h |
| 007 | 195 | 195 | 172 | 725g | 71h |
| 008 | 195 | 179 | 172 | 775g | 73h |
| 009 | 185 | 179 | 156 | 476g | 72h |
| Poids total ⇒ | 3854g | ||||
Estimation du budget avec un prix du PLA à 39 € les 2kg
3,854g*19,5€ = 75,15€
| Retour au sommaire |
Positionnement conseillé des différentes pièces
|
Les pièces ont été positionnées pour avoir une qualité visuelle après montage la plus propre possible. Comme beaucoup de PLA , quand vous enlevez les supports ,il reste des petites parties blanches disgracieuses. Si vous voulez éviter de passer beaucoup de temps en post impression pour le nettoyage , il faut choisir ce type de positionnement.
|
 Position pour la pièce 001 Zortrax – RedOhm |
 Position pour la pièce 002 Zortrax – RedOhm |
 Position pour la pièce 003 Zortrax – RedOhm |
|
 Position pour la pièce 004 Zortrax – RedOhm |
 Position pour la pièce 005 Zortrax – RedOhm |
 Position pour la pièce 006 Zortrax – RedOhm |
|
 Position pour la pièce 007 Zortrax – RedOhm |
 Position pour la pièce 008 Zortrax – RedOhm |
 Position pour la pièce 009 Zortrax – RedOhm |
| Retour au sommaire |
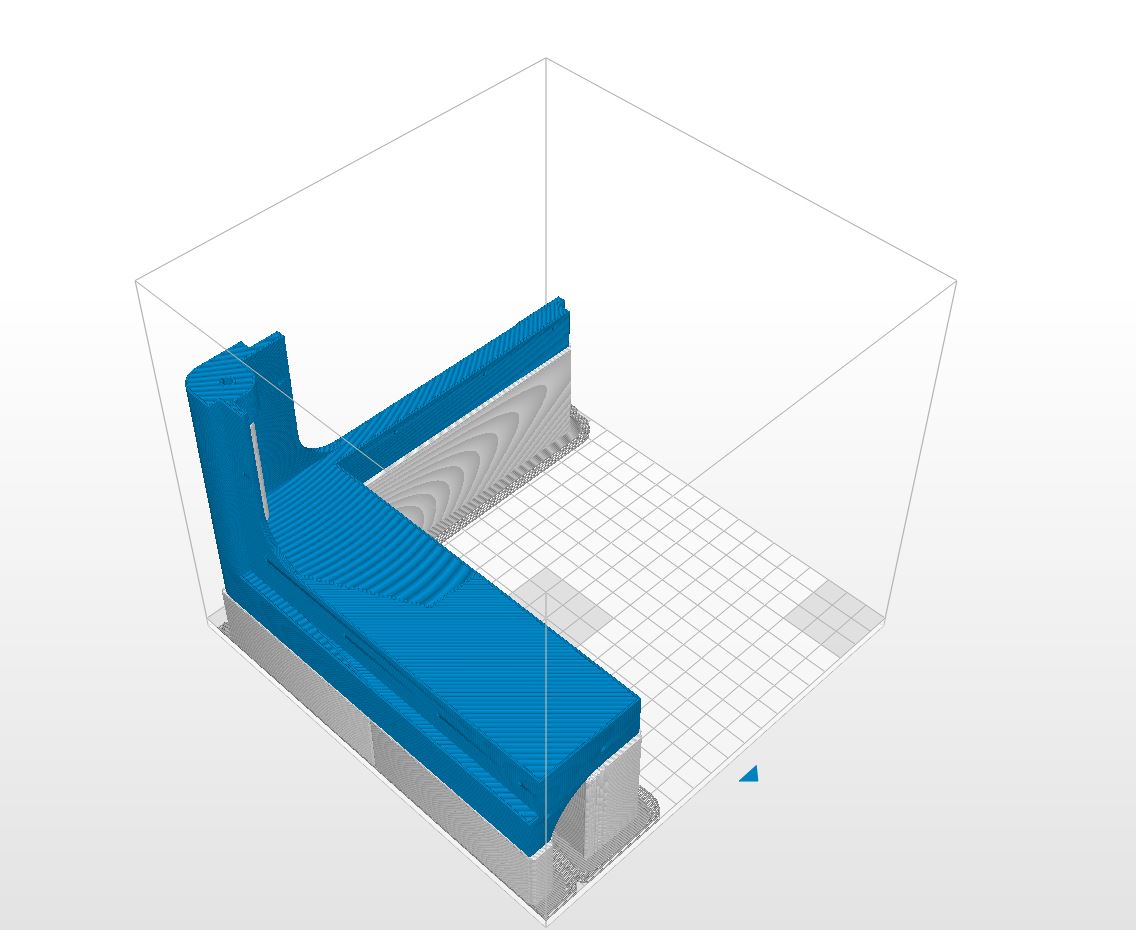
![]()
Impression avec du filament PLA Arianeplast |
Caractéristique des pièces du capot Zortrax M200
|
Attention : Attention seuls les types de filament suivant sont à utiliser dans ce cas bien précis, le PLA rouge , noir et gris métallisé 3D
| Pièces | Taille X en mm |
Taille Y en mm |
Taille Z en mm |
Poids en g | Temps estimé | Gain matière |
| 001 | 199 | 183 | 140 | 383g | 31h | 0g |
| 002 | 199 | 183 | 140 | 359g | 31h | 0g |
| 003 | 193 | 179 | 140 | 418g | 36h30 | 0g |
| 004 | 55 | 84 | 110 | 110g | 8h30 | 15g |
| 005 | 143 | 140 | 140 | 118g | 8h54 | 19g |
| 006 | 185 | 179 | 158 | 251g | 24h | 211g |
| 007 | 195 | 195 | 172 | 297g | 30h | 428g |
| 008 | 195 | 179 | 172 | 369g | 34h | 406g |
| 009 | 185 | 179 | 256 | 266g | 26h | 204g |
| Poids total ⇒ | 2571g | |||||
Estimation du budget avec un prix du PLA type ArianePlast métallisée à 39 € les 2kg
3,854g*19,5€ = 50.13€
Positionnement conseillé des différentes pièces
|
Ce filament ( filament gris, rouge , noir métallisé exclusivement ) possède la propriété de ne laisser que très peu de traces lors du nettoyage des supports nécessaires à la fabrication de celle-ci. Cela nous permet d’avoir un aspect des plus réussis. C’est pour cette raison que les pièces sont positionnées pour avoir le moins de supports possibles, d’où une consommation de filament plus réduite et un temps d’impression moins long.
|
 Position pour la pièce 001 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 002 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 003 ArianePlast Zortrax M200 – RedOhm |
|
 Position pour la pièce 004 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 005 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 006 ArianePlast Zortrax M200 – RedOhm |
|
 Position pour la pièce 007 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 008 ArianePlast Zortrax M200 – RedOhm |
 Position pour la pièce 009 ArianePlast Zortrax M200 – RedOhm |
| Retour au sommaire |
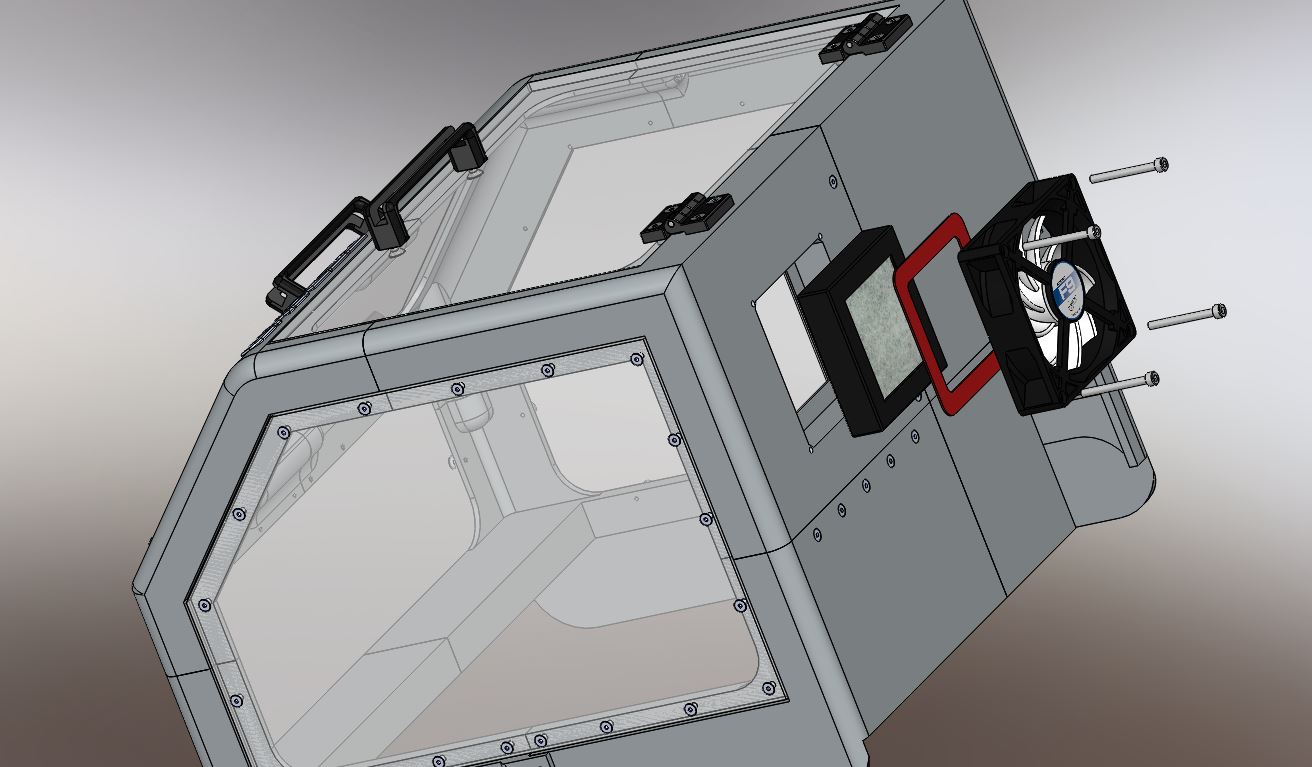
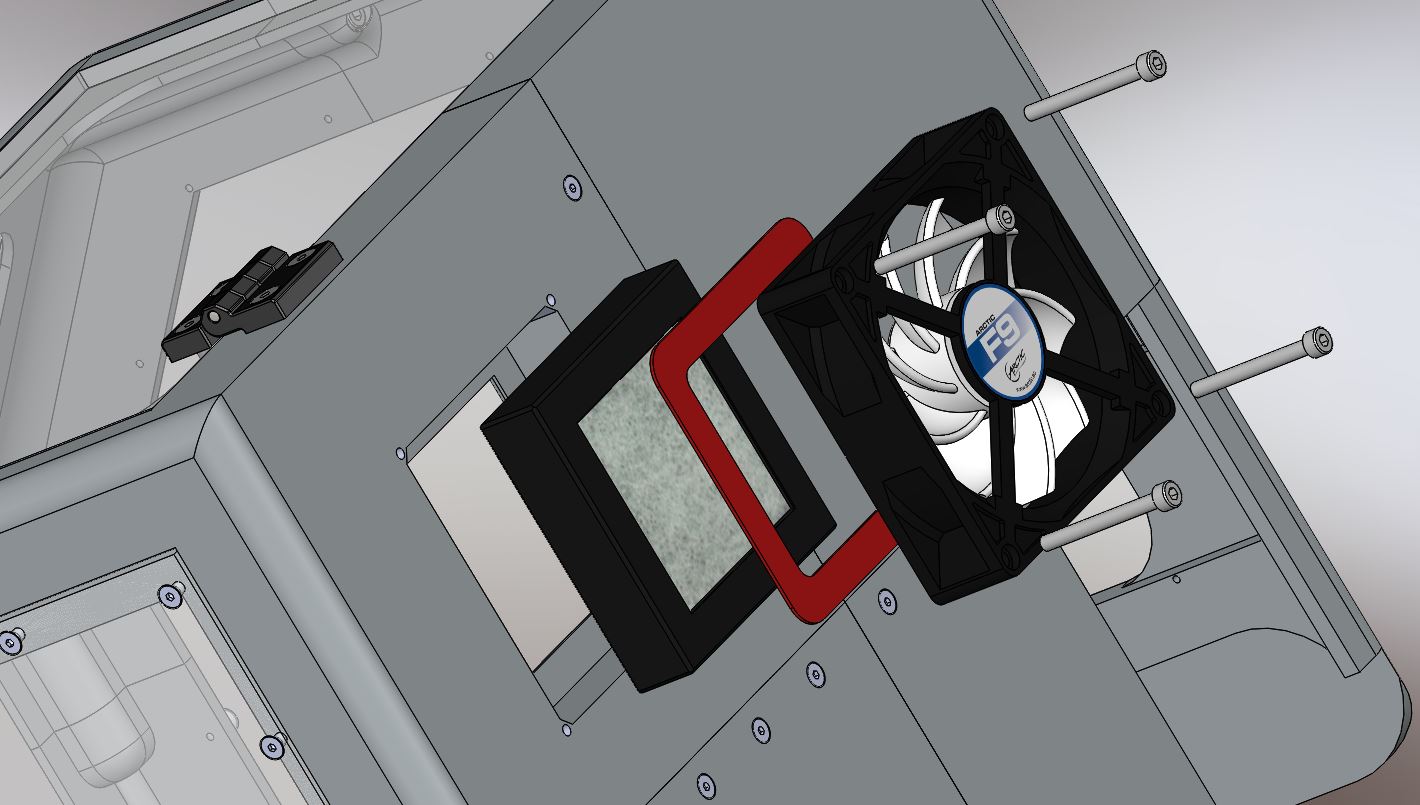
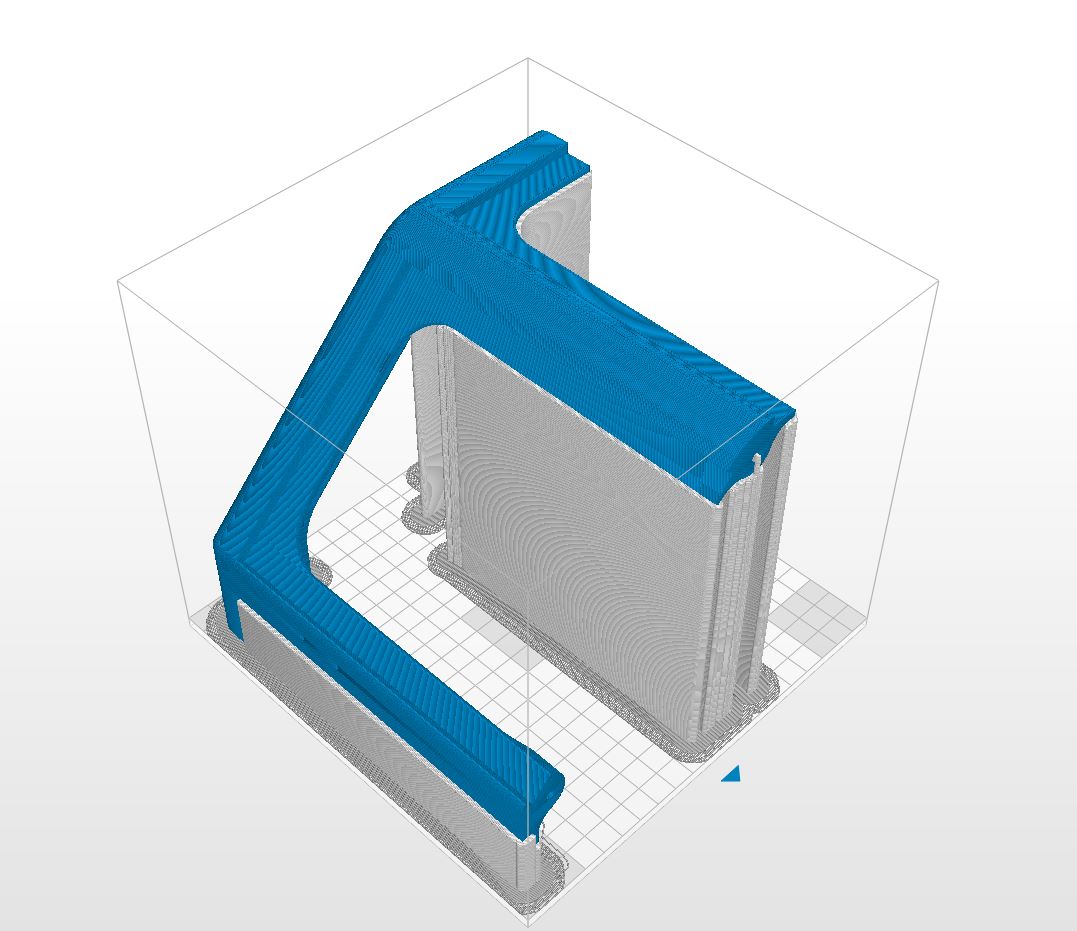
![]()
Impression des accessoires pour le capot de la Zortrax M200 |
| Pièces | Taille X en mm |
Taille Y en mm |
Taille Z en mm |
Poids en g | Temps estimé | Matière |
| 020 | 98 | 14 | 119 | 93g | 7h10mm | PLA |
| 021 | 24 | 32 | 10 | 4g | 32mm | ABS ou Hips |
| 022 | 140 | 40 | 30 | 42g | 4h28mm | ABS ou Hips |
| Retour au sommaire |
![]()
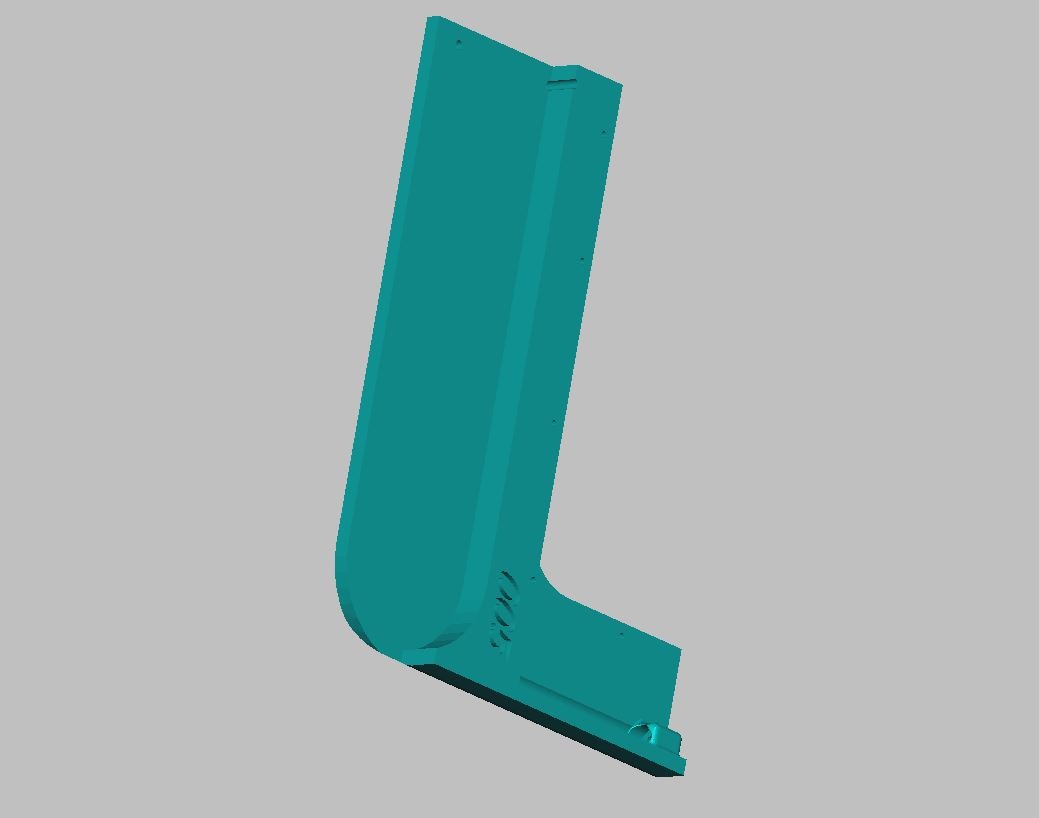
Les fichiers STL pour l’impression du capot pour l’imprimante Zortrax M200 |
|
Cliquez sur la pièce pour agrandir la vue |
||
|
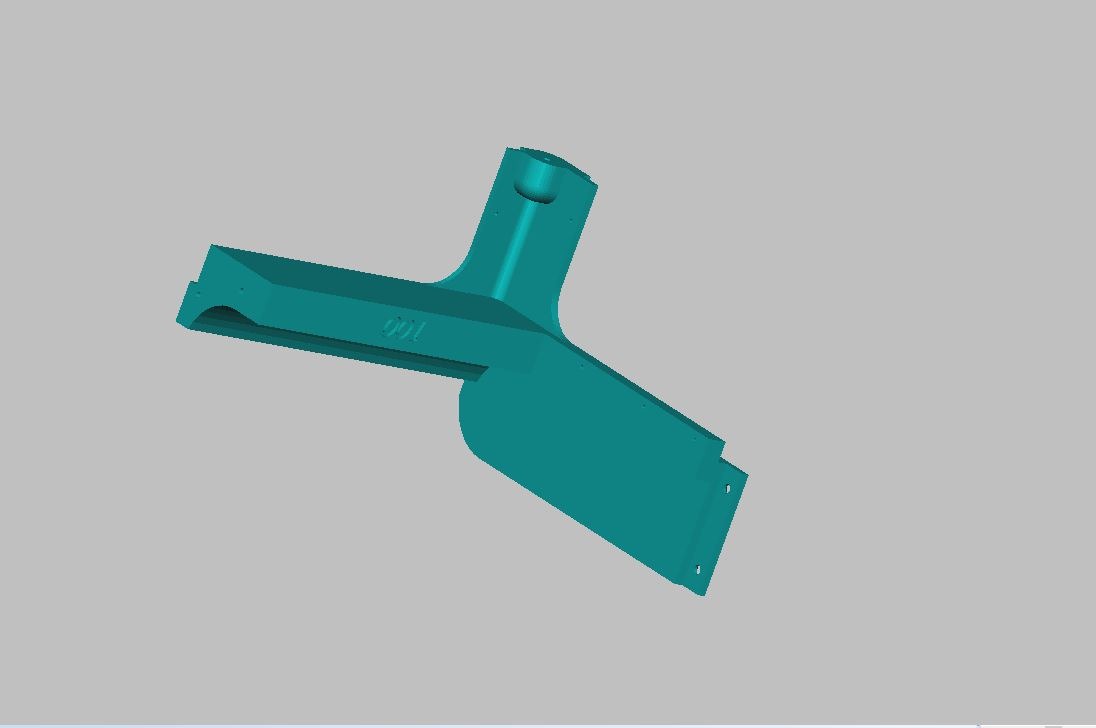 Capot Zortrax piece 001 |
 Capot Zortrax piece 002 |
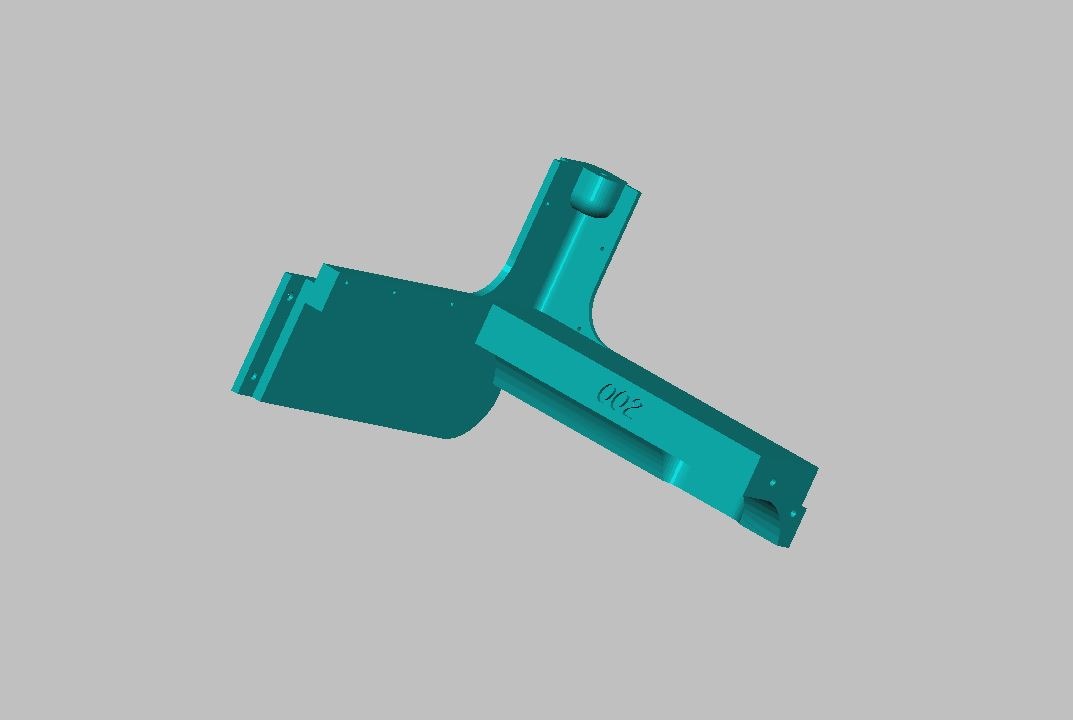
 Capot Zortrax piece 003 |
|
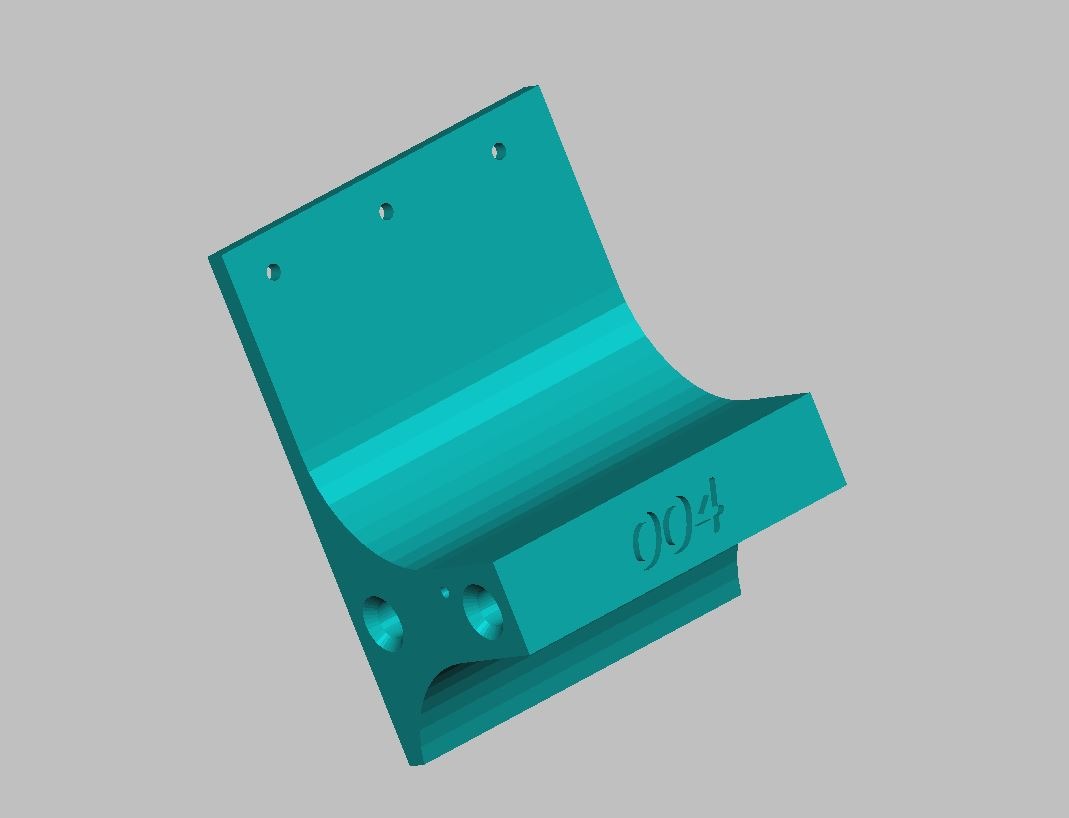 Capot Zortrax piece 004 |
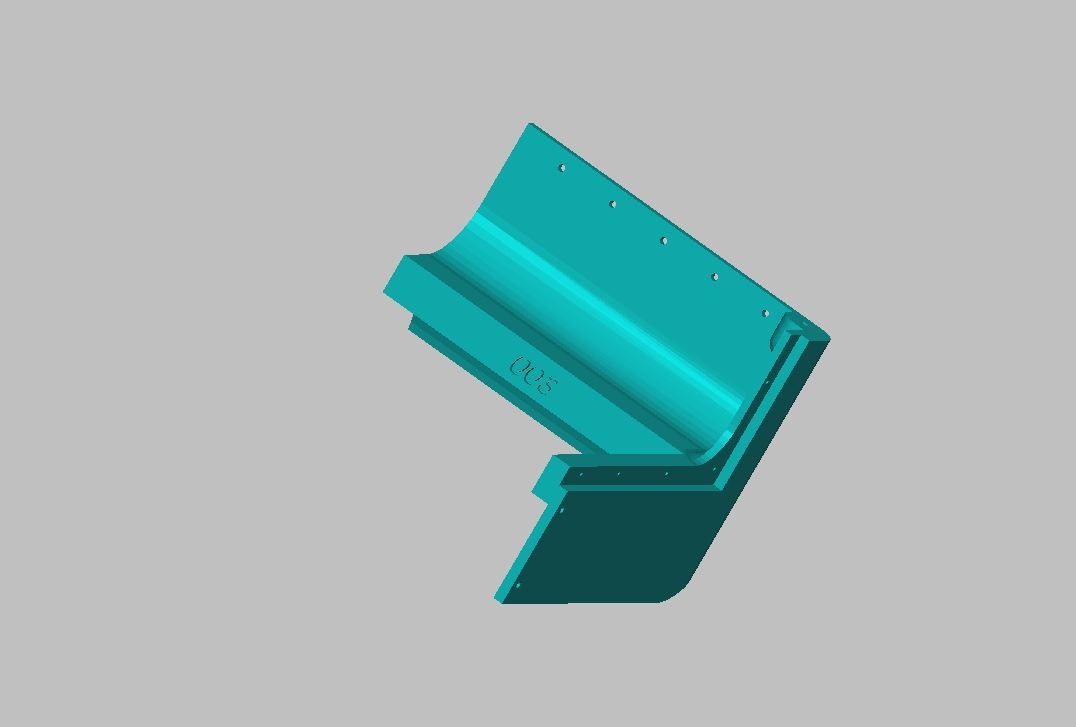
 Capot Zortrax piece 005 |
|
| Retour au sommaire |
|
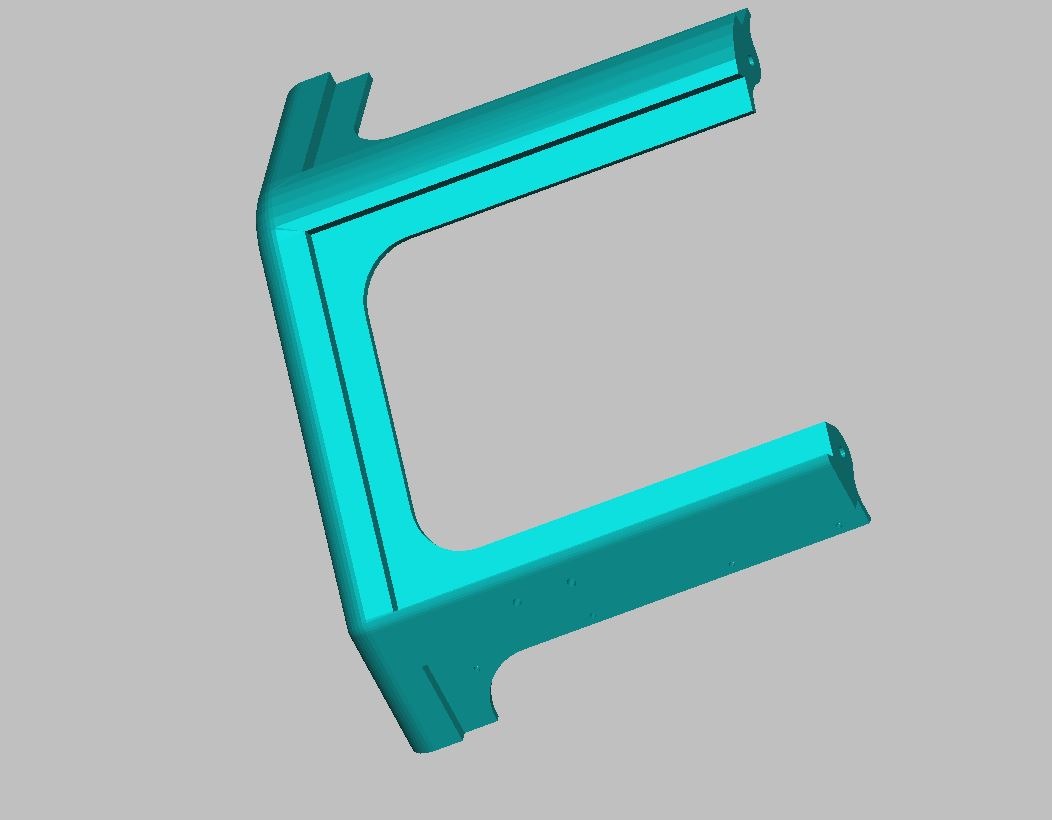 Capot Zortrax piece 006 |
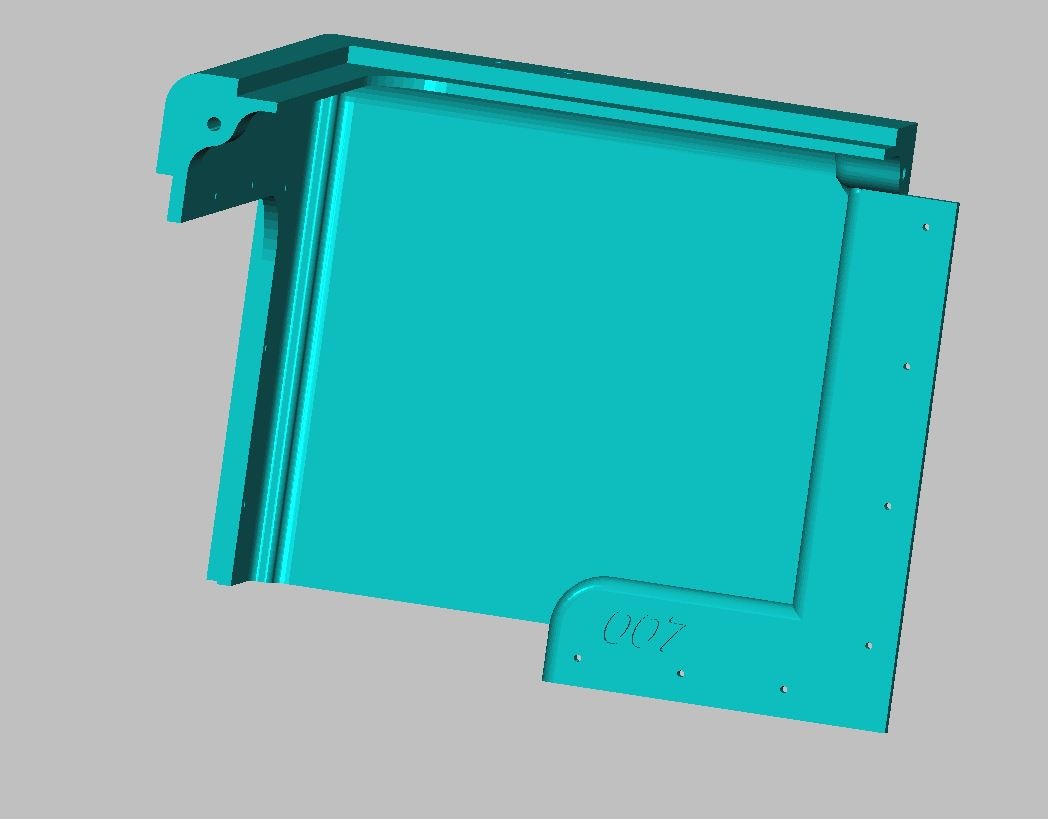 Capot Zortrax piece 007 |
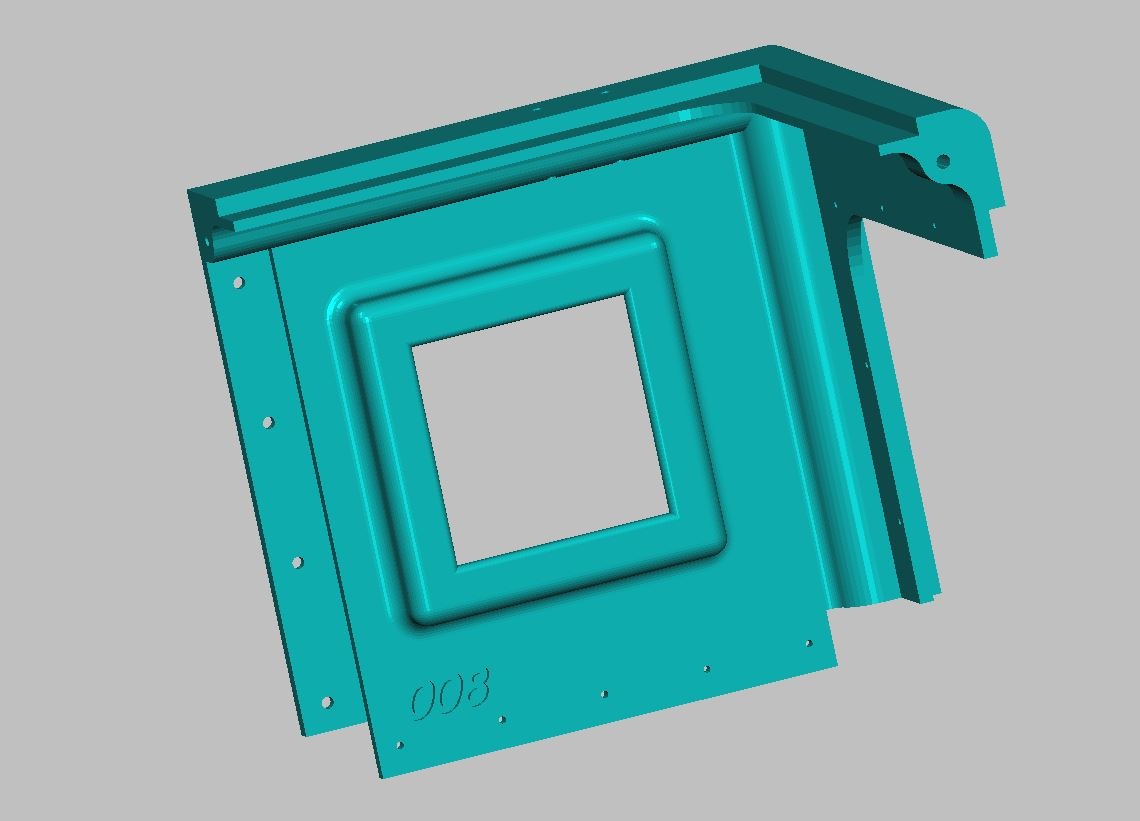 Capot Zortrax piece 008 |
|
 Capot Zortrax piece 009 |
||
| Retour au sommaire |
|
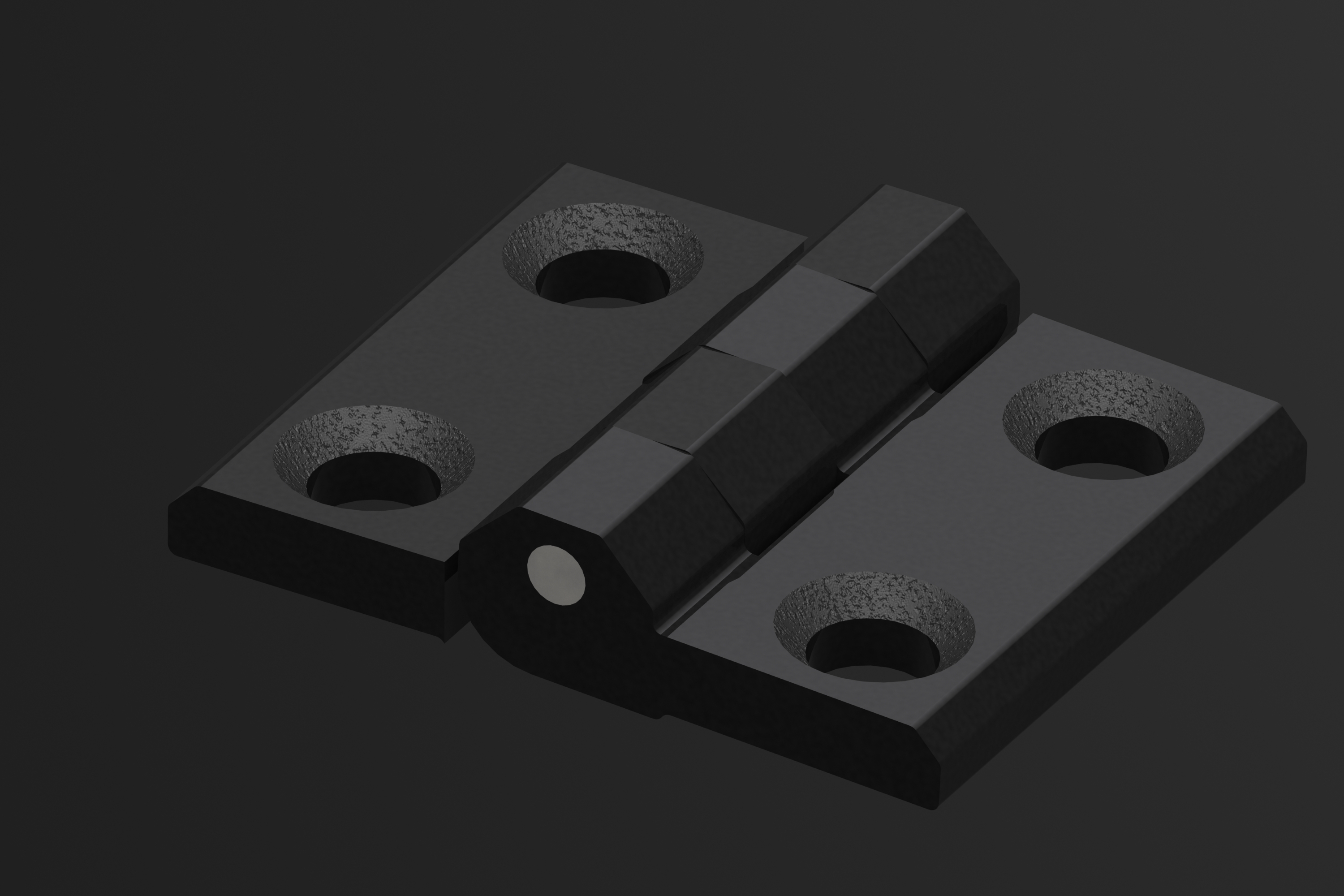
 Pièce 020 – Capot câble Zortrax M200 – RedOhm |
 Pièce 021- Charniere Zortrax M200 – RedOhm |
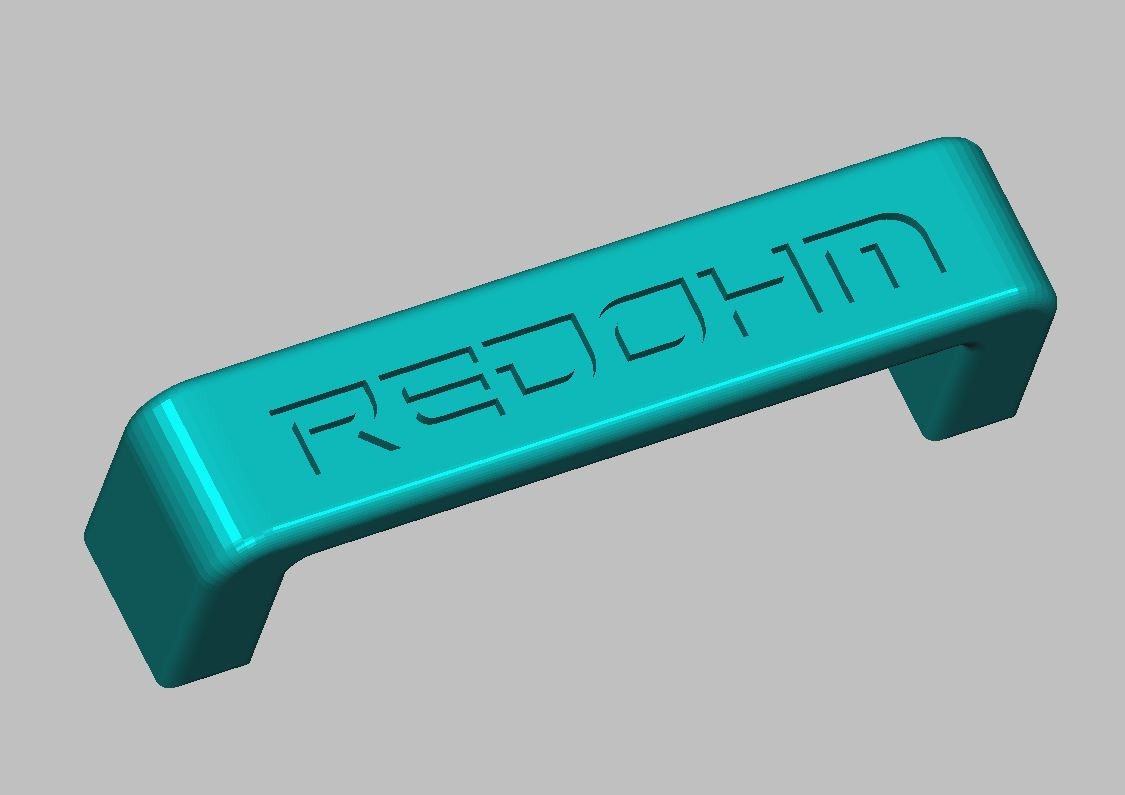 Pièce 022 -Poignet Zortrax M200 – RedOhm |
| Retour au sommaire |
![]()
Dossier pour le plexiglas |
Le polyméthacrylate de méthyle ou PMMA, plus connu sous le nom de plexiglas, a été inventé par les chimistes Barker et Skinner en 1924.
Il s’agit d’une matière Plastique appartenant à la famille des thermoplastiques, qui a pour propriétés d’être transparente et très résistante.
Ce matériau appartient à la famille des thermoplastiques, c’est-à-dire des matières plastiques qui se déforment et peuvent être façonnées sous l’action de la chaleur.
Source : Gralon.net
Exemple d’approvisionnement : Evonik industries
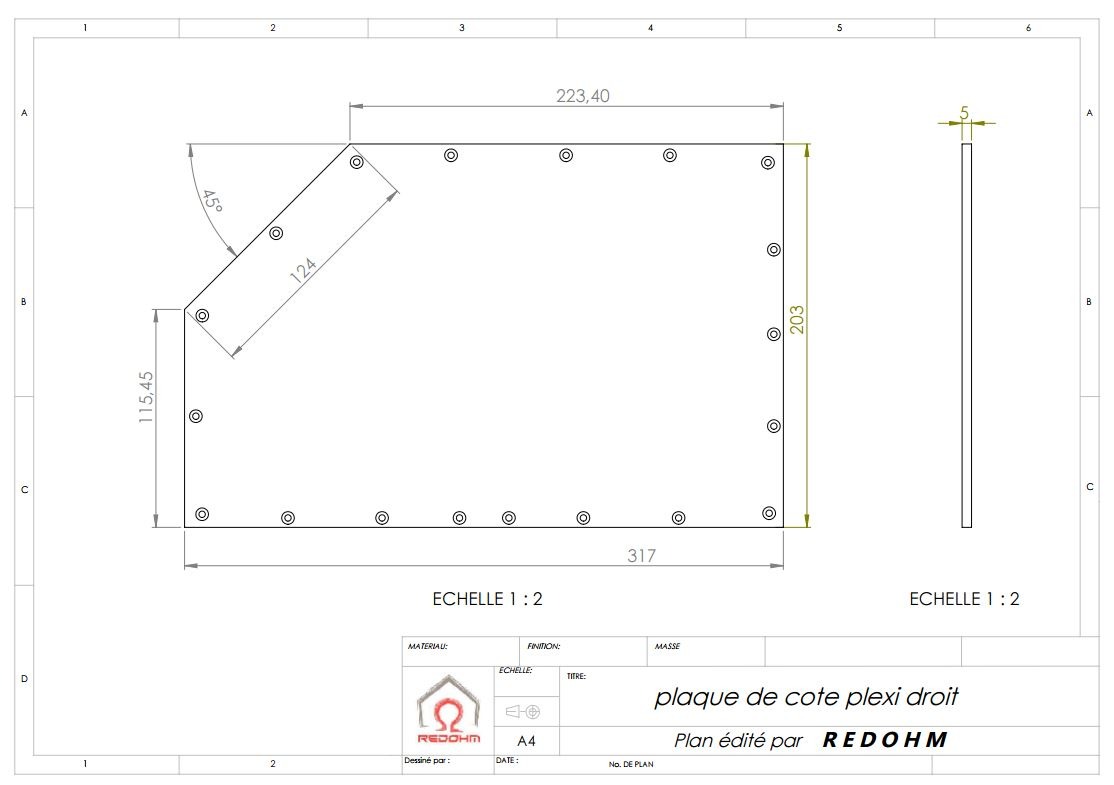
Plaque de cote plexi droit – RedOhm
plaque de cote plexi droit
plaque de cote plexi gauche
plaque dessus
plaque devant bas
plaque devant haut
| Retour au sommaire |
![]()
![]()
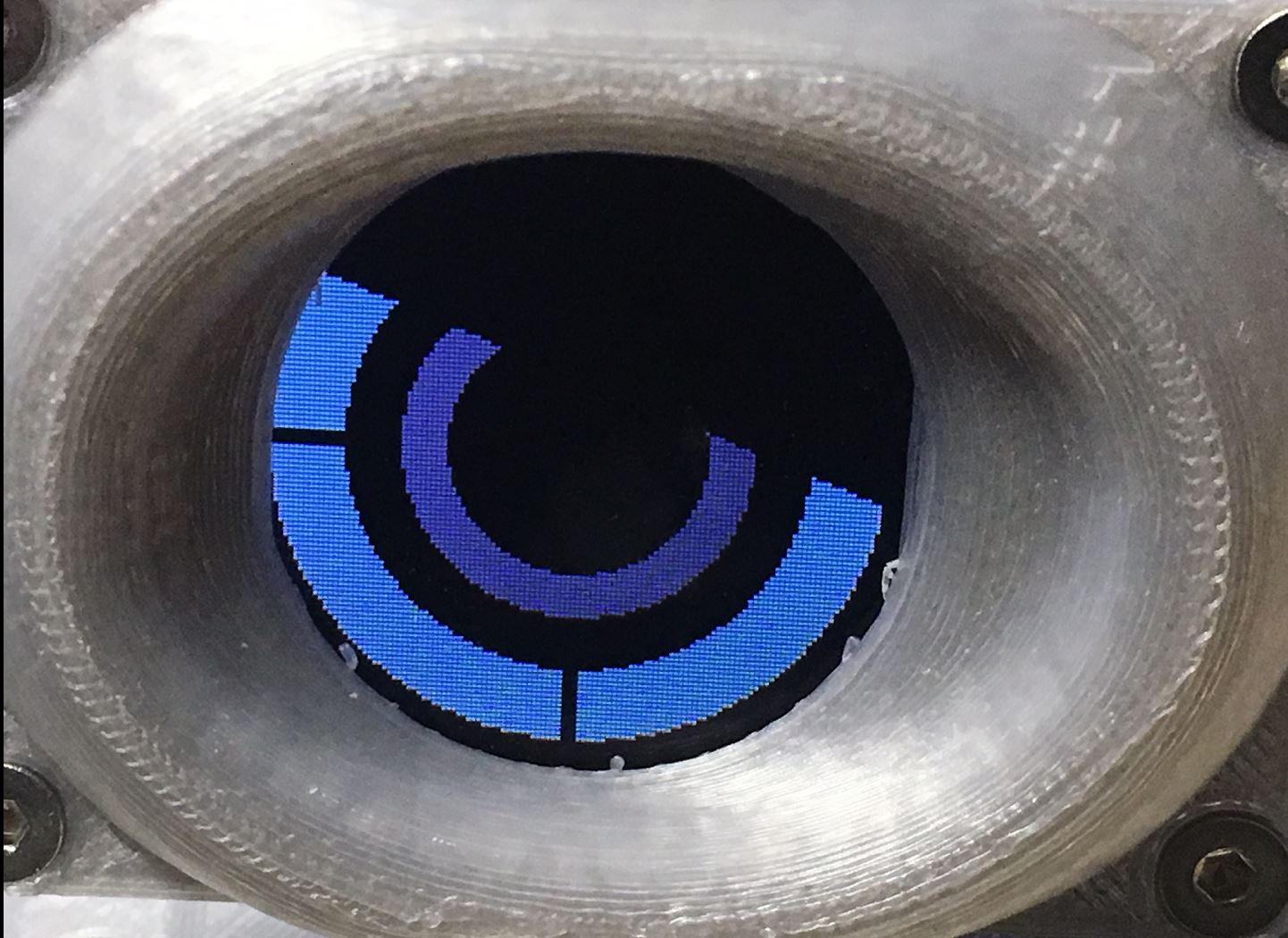
Maya oeil penaud droit RedOhm
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 |
/* * * * Creation de l'oeil penaud droit * * * * * code projet : 0000-Oeil_penaud_droit * * Herve Mazelin - RedOhm * 21/01/2017 */ // je charge la librairie SPI // Cette librairie vous permet de communiquer avec des périphériques SPI // La carte Arduino en tant que "maitre" par defaut #include <SPI.h> // je charge la librairie TFT // Cette bibliothèque permet à une carte Arduino de communiquer à // l'écran LCD TFT #include <TFT.h> // Affectation des pins pour la communication Arduino-> afficheur #define cs 10 #define dc 9 #define rst 8 TFT screen = TFT(cs, dc, rst); // variable du type int pour les boucle de creation de l'oeil // Declare la variable X // Rappel sur la fonction d'une variable :On peut définir une variable comme // une boite ou l’on stock des balles .Une variable est une boite ou // l’on stock un nombre ,et comme il existe une multitude de nombres: // Exemple entiers ,décimaux etc …Il faut donc assigner un type à cette // variable . int x; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // initialisation de l'écran screen.begin(); // Efface l'ecran et met le fond en noir screen.background(0,0,0); //defini la couleur pour tracer l'objet a dessiner screen.stroke(255,255,255); // 1 anneau exterieure bleu // définition de la couleur de remplissage exemple bleu -> 128,255,255 screen.fill(128,255,255); // je dessine un annneau exterieur dans le centre de l'écran // je prend la largeur de l'ecran que je divise par 2 // je prend la hauteur de l'ecran que je divise par 2 screen.circle(screen.width()/2, screen.height()/2, 60); //dessine le trait horizontal et vertical //defini la couleur pour tracer l'objet a dessiner en noir screen.stroke(0,0,0); // Trace trois lignes horizontale qui traverse l'ecran for (x=0;x<3;x++) { screen.line(1,63+x,159,63+x); } // Trace une ligne verticale qui traverse l'ecran d'une epaisseur de // 3 pixels for (x=0;x<3;x++) { screen.line (79+x,1,79+x,127); } // 2 cercle // définit la couleur de remplissage exemple gris 127.127.127 screen.fill(0,0,0); // je dessine un cercle dans le centre de l'écran screen.circle(screen.width()/2, screen.height()/2, 45); // 3 cercle // définit la couleur de remplissage exemple gris 127.127.127 screen.fill(136,136,136); // je dessine un cercle dans le centre de l'écran screen.circle(80, 64, 35); // 4 cercle // définit la couleur de remplissage exemple noir 0.0.0 screen.fill(0,0,0); // je dessine un cercle dans le centre de l'écran screen.circle(screen.width()/2, screen.height()/2, 25); // Dessin de l'oeil penaud ------------------------------ // je dessine un triangle // Boucle comptant de 0 a 20 avec un increment de 1 // for (initialisation ; condition ; increment) // entre crochet { instructions executees dans la boucle } for( x=0;x<80;x++){ // définit la couleur de remplissage exemple noir 255.255.255 screen.fill(255,255,255); // dessine une ligne entre deux points les parametres : // xStart) int, la position horizontale où la ligne commence // ystart) int, la position verticale où la ligne commence // xEnd) int, la position horizontale où la ligne se termine // yEnd) int, la position verticale où les extrémités de la ligne // screen.line (xStart,ystart,xEnd,yEnd); screen.line (0,0,160,x); } // je dessine le 2eme triangle je modifie la position verticale // ou la ligne commence // Boucle comptant de 0 a 20 avec un increment de 1 // for (initialisation ; condition ; increment) // entre crochet { instructions executees dans la boucle } for( x=0;x<20;x++){ // définit la couleur de remplissage exemple noir 255.255.255 screen.fill(255,255,255); // dessine une ligne entre deux points les parametres : // xStart) int, la position horizontale où la ligne commence // ystart) int, la position verticale où la ligne commence // xEnd) int, la position horizontale où la ligne se termine // yEnd) int, la position verticale où les extrémités de la ligne // screen.line (xStart,ystart,xEnd,yEnd); screen.line (0,x,160,79); } } void loop() { // vide pour le besoin de la demonstration } |
![]()
– Temps de réalisation : 4h38 mm
– Matière : 58 grammes
– Type de Matière : Z-HIPS ( autre voir tableau )
– Remplissage : High dans le menu Z- suite ( correspond à ± 60 % )
– Définition : Normal ( dans menu Z-suite )
– Température : 240 à 250 °C
– Note pour ABS : Un lit chauffé à 130°C
![]()
Robot Maya support yeux piece 011 – RedOhm
Information pour l’impression :
– Temps de réalisation :6h30mm
– Matière : 103.27 g (0.228ib)
– Type de Matière : ABS ou PLA
– Remplissage : 30%
– Définition : Haute
– Température : 220°C ABS / 210°C PLA
– Note pour ABS : Un lit chauffé à 80°C
![]()
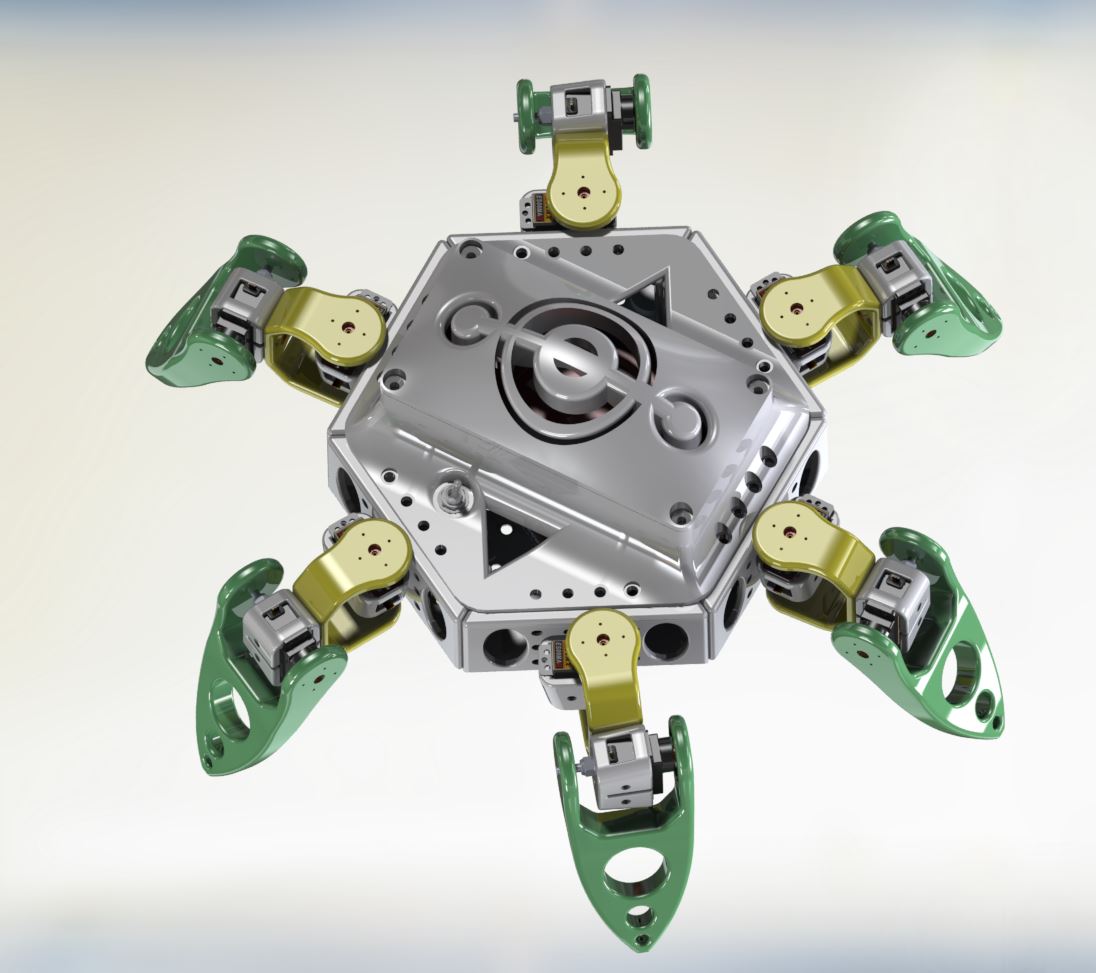
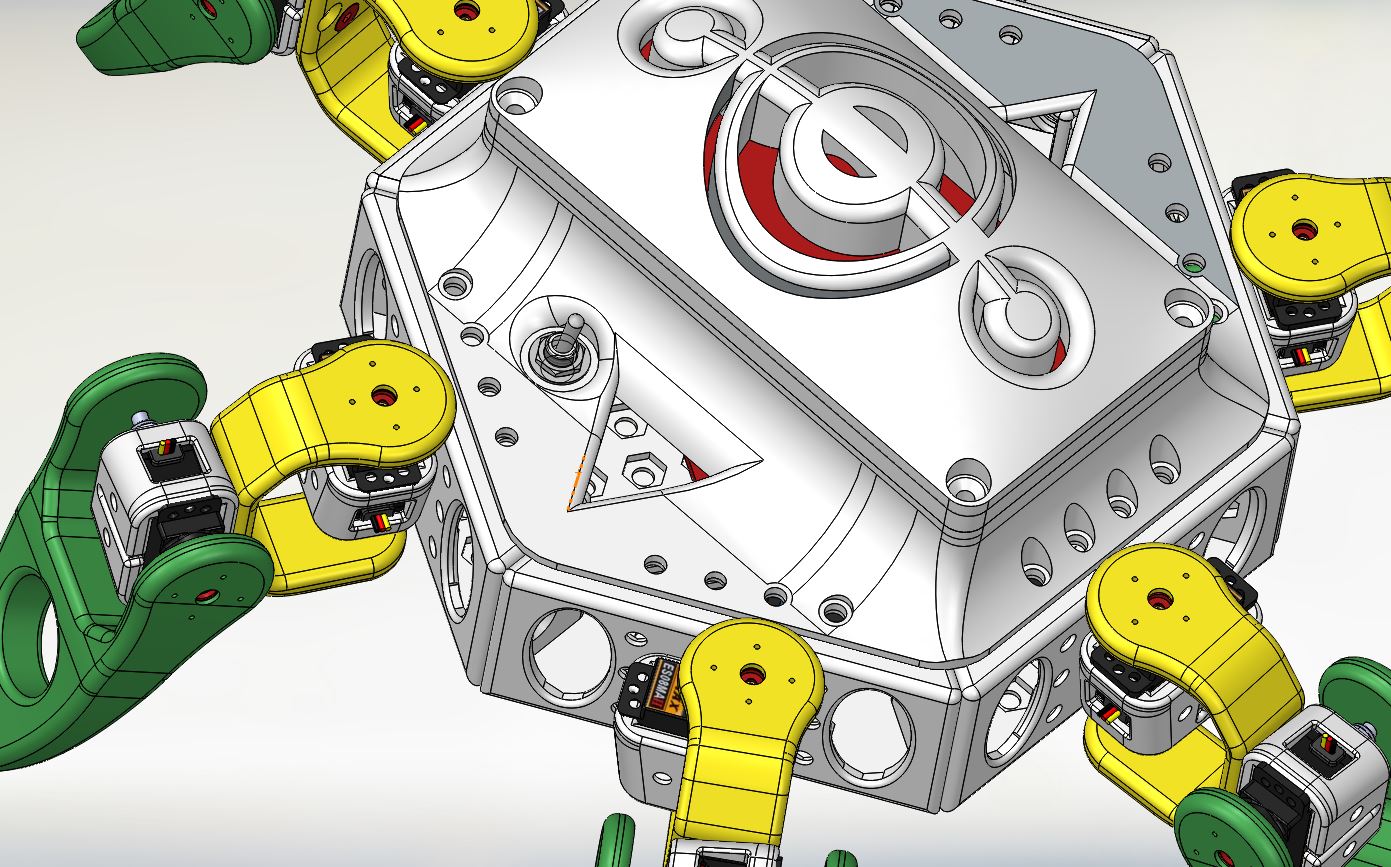
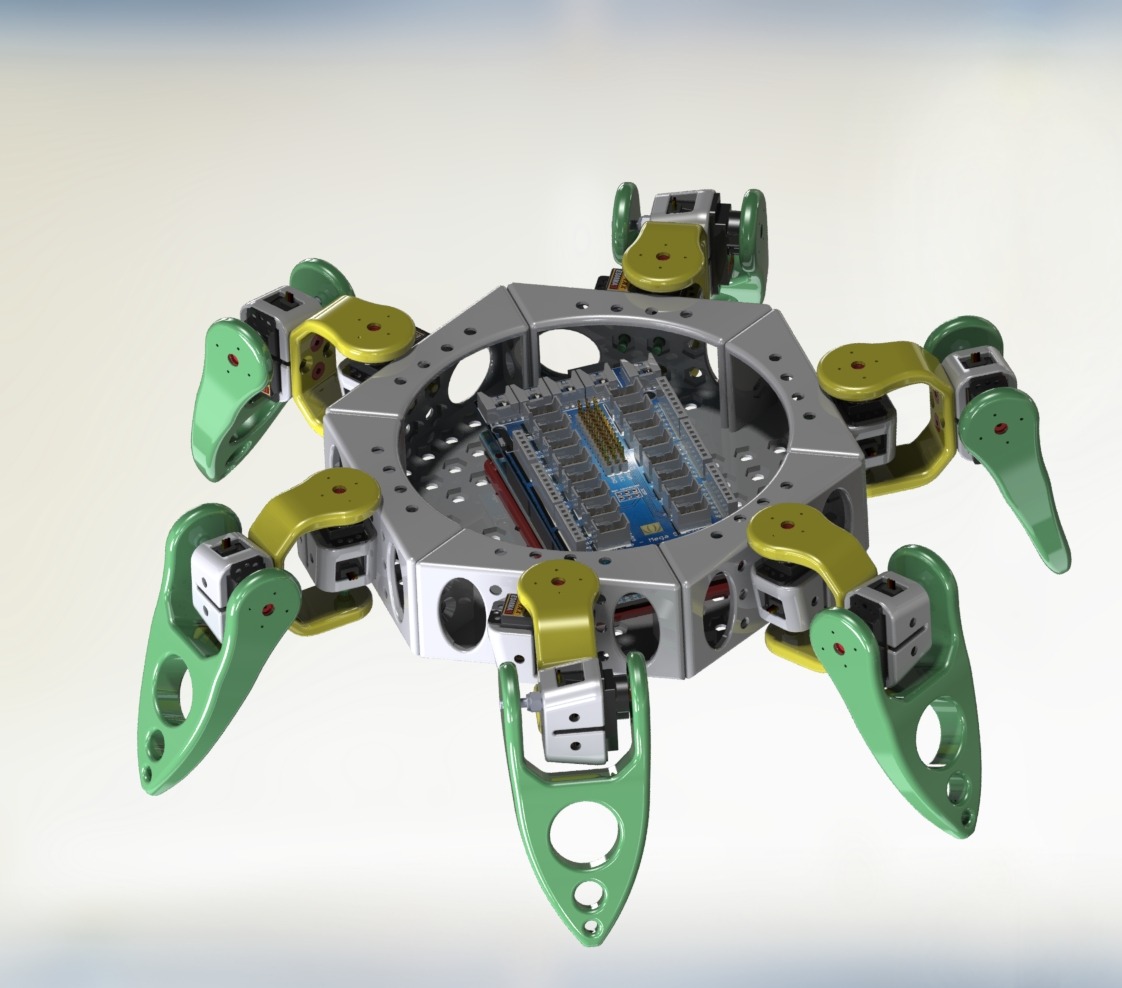
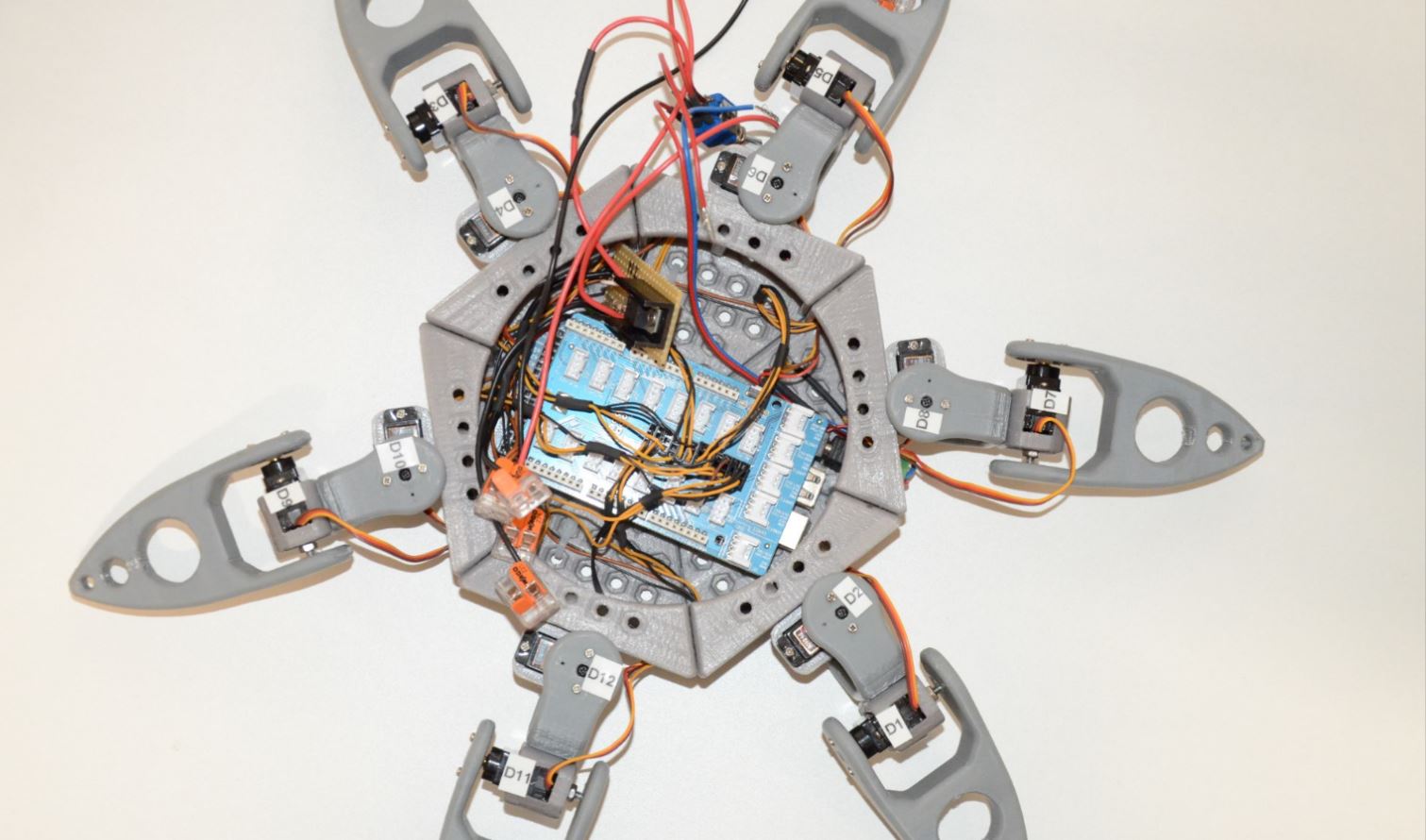
Mise à jour le 29/06/2019: Retrouvez sur cette page l’ensemble des articles concernant le robot Spider S12-PC ( album photos des pièces , plan mécanique , fichier à télécharger pour l’impression 3D )
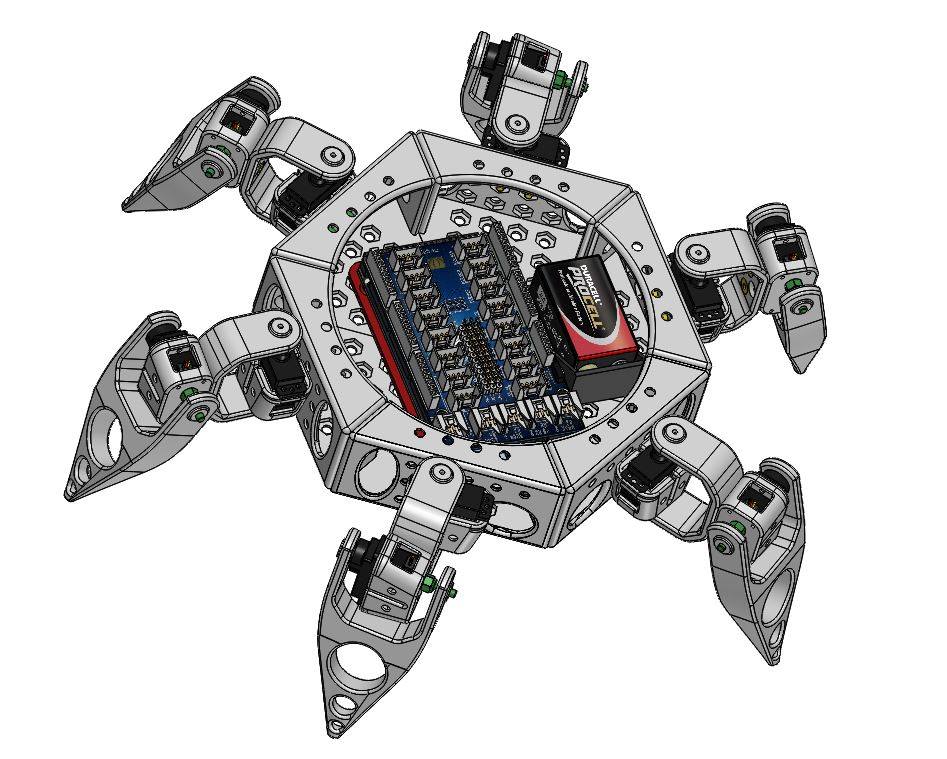
Mini Spider S12 patte courte Version 02022017 – RedOhm
Sommaire :
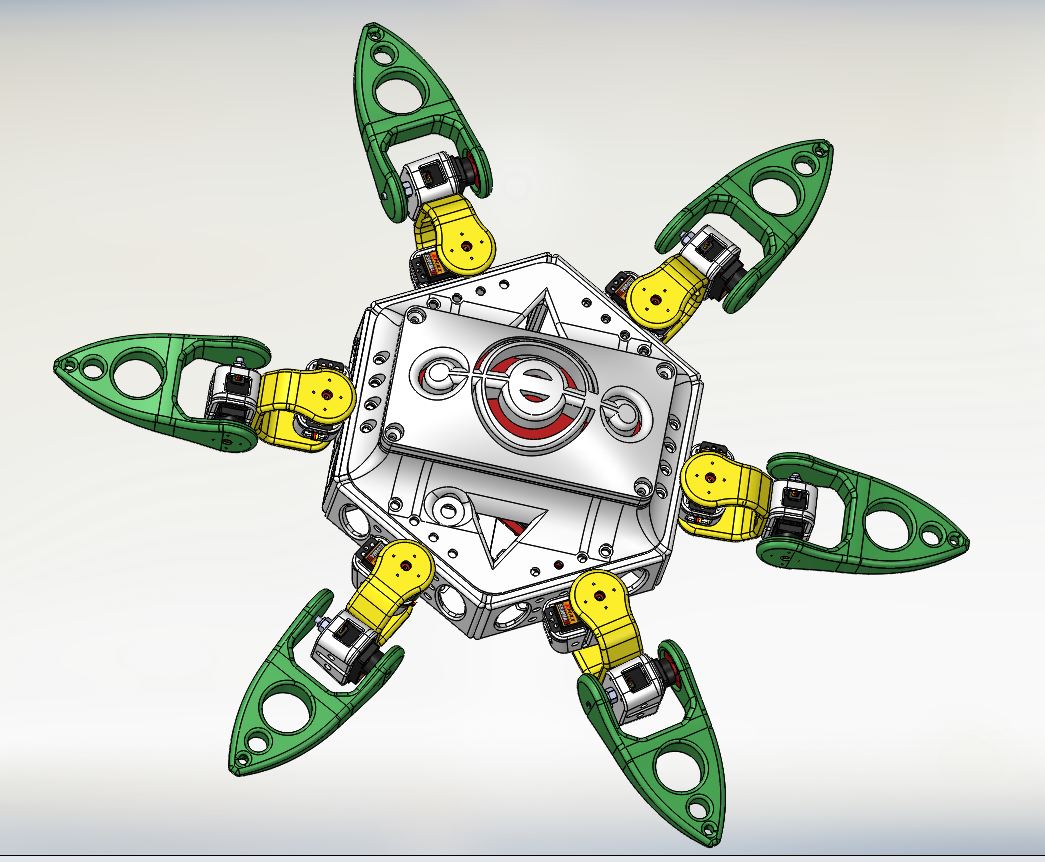
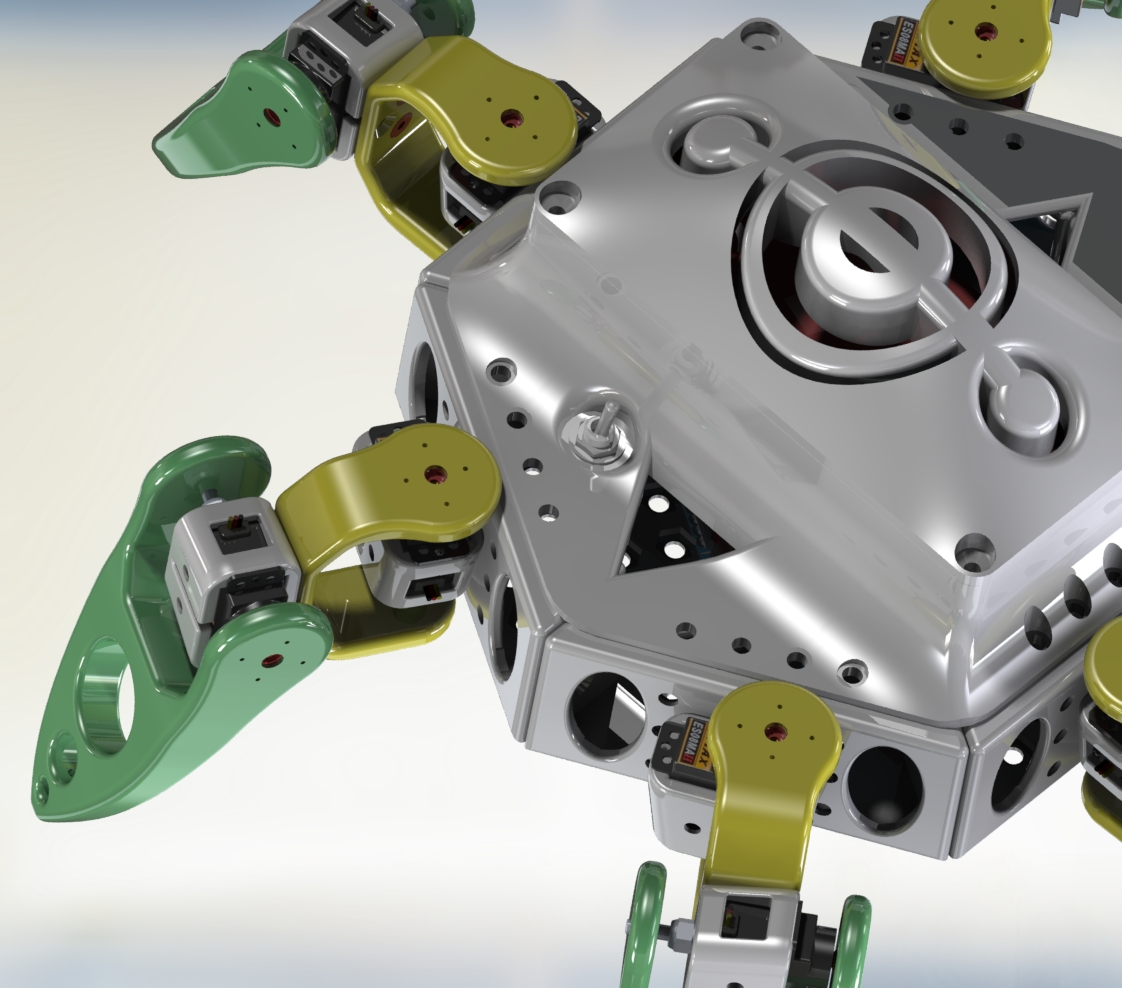
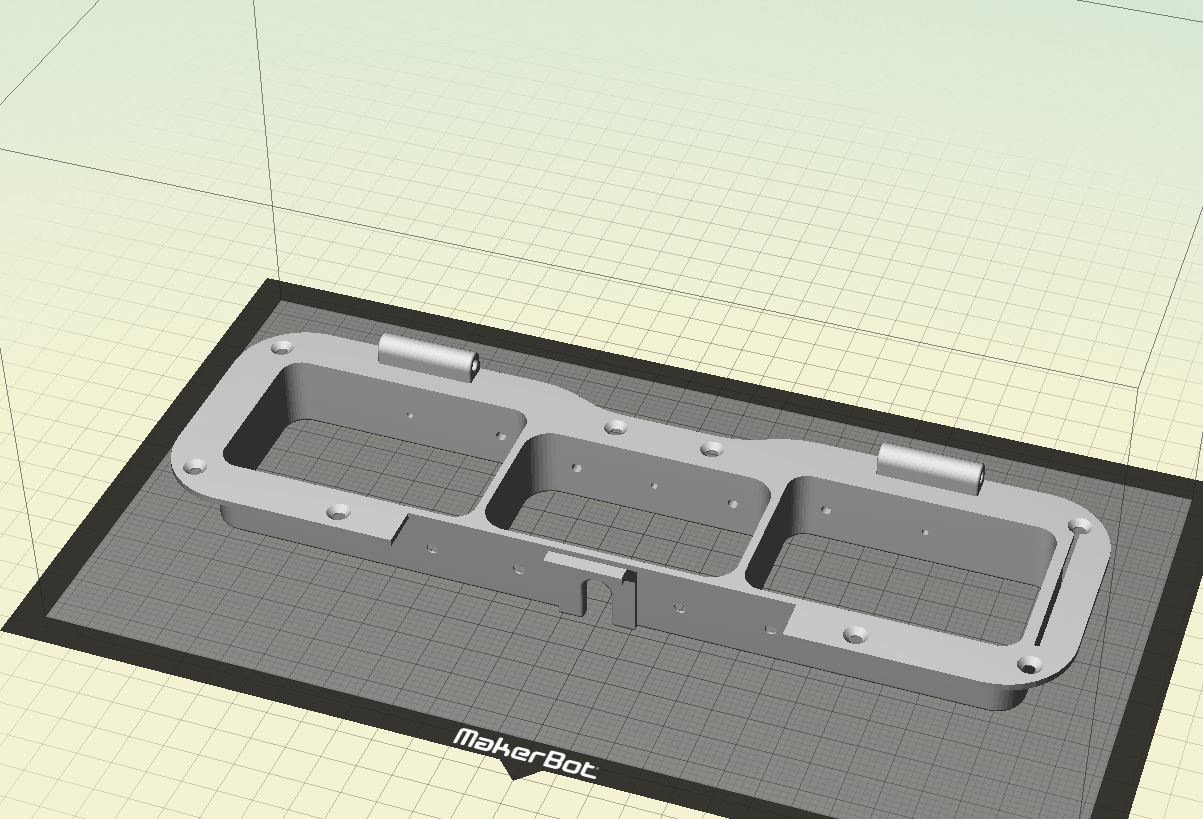
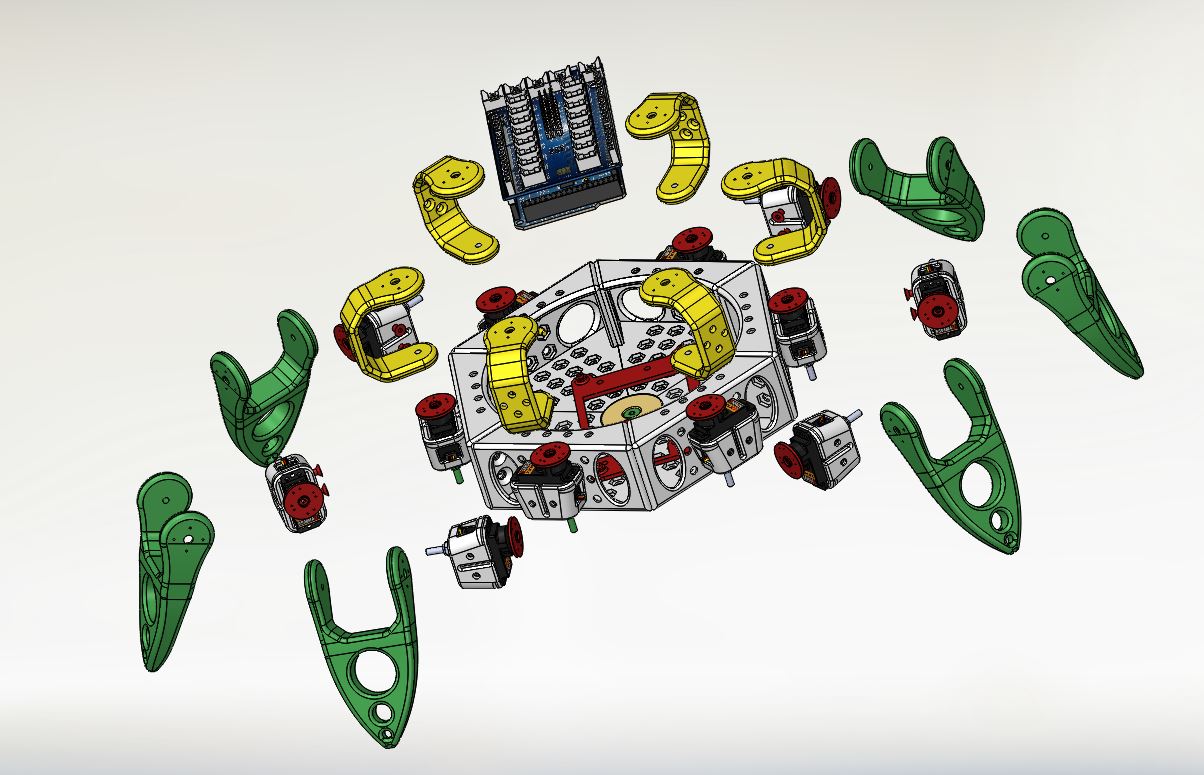
Vue éclatée de mini Spider S12-PC et l’ensemble des fichiers à télécharger . Version 1.00 |

Vue éclatée de mini Spider S12 Version 1.00 – RedOhm
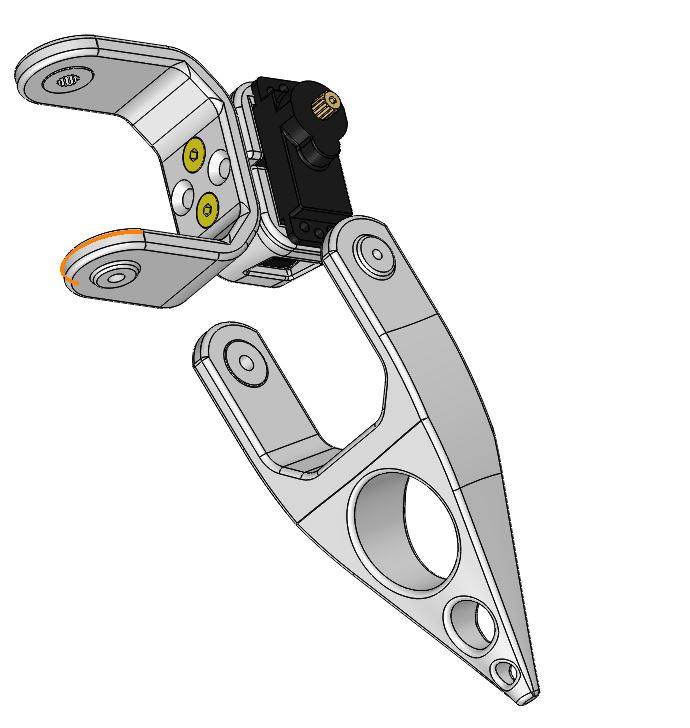
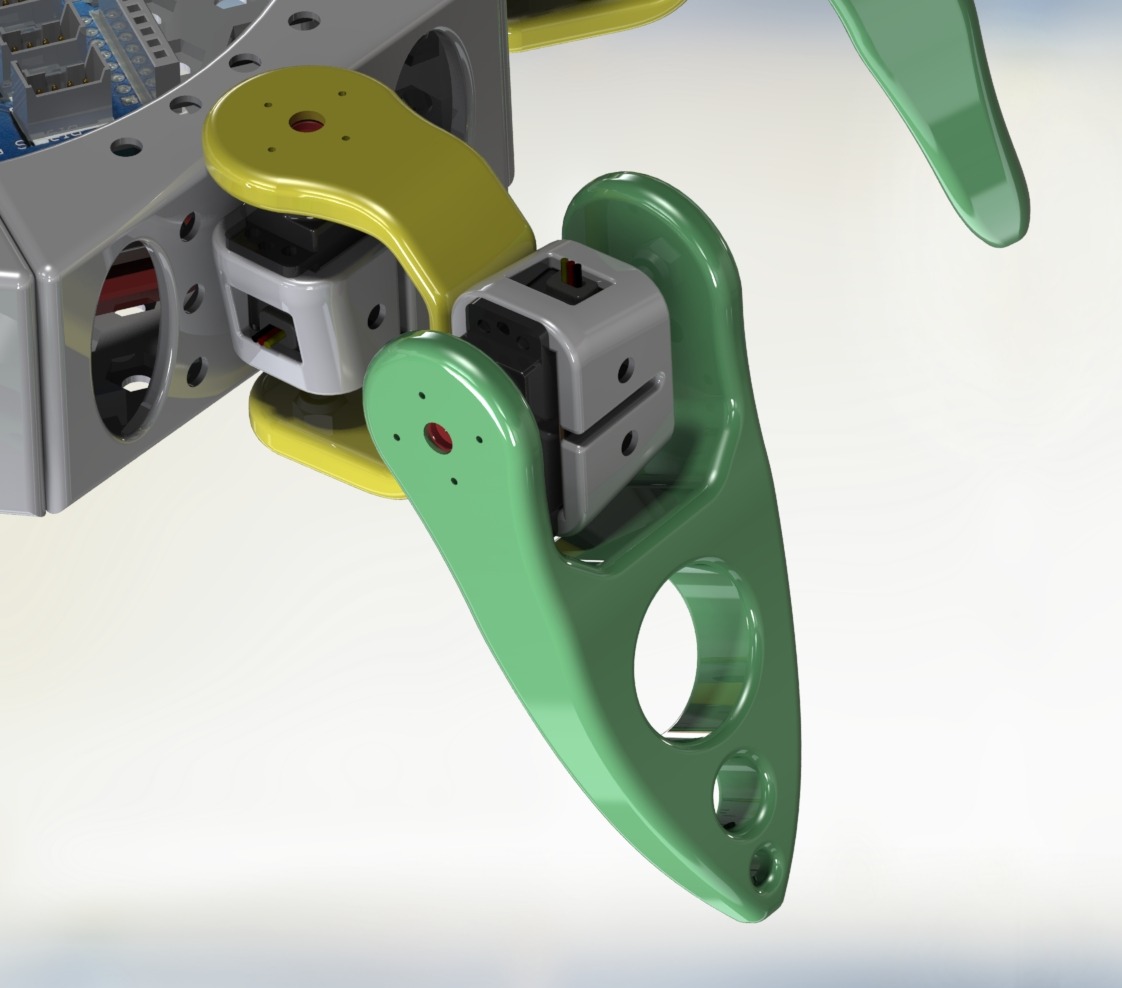
Vue de la patte et de son servomoteur – RedOhm –
Ensemble des fichiers à télécharger pour imprimer Spider version 1.00
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
![]()
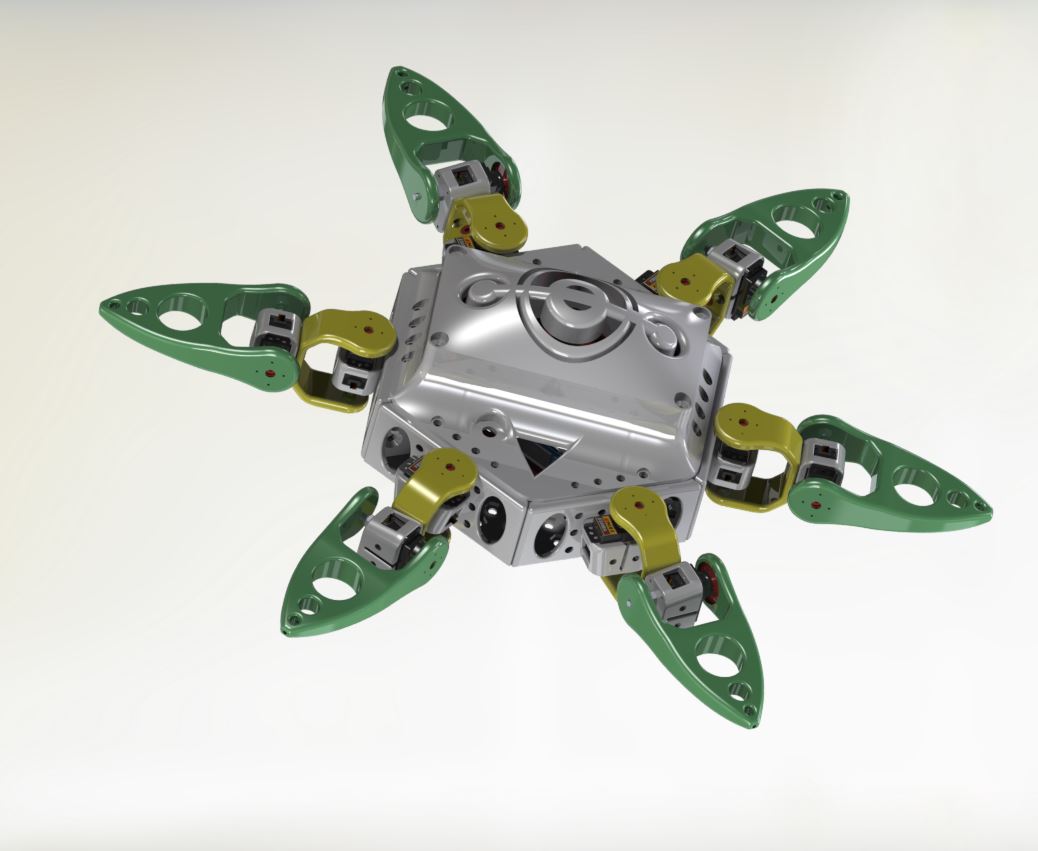
Vue éclatée de mini Spider S12-PC pour le choix des pièce et l’ensemble des fichiers à télécharger Version 09-02-2017 |
Spider version 09-02-2017 RedOhm – 001
Spider version 09-02-2017 RedOhm – 002
Spider version 09-02-2017 RedOhm – 003
Ensemble des fichiers à télécharger pour imprimer Spider Version 2.00
12 Servomoteur: type ES08MA miniature avec pignonnerie métallique
Informations techniques utiles :
Sur les servomoteurs en général , Carte Arduino Mega , La programmation en particulier de la carte Arduino Mega , l’impression 3D en général .
Fournisseur:
Servomoteurs : Gotronic
Arduino Mega 2560 : Selectronic
Montant total du montage ( en version simple ):
1 Ensemble de PLA ou HIPS ou ABS => 25 €
12 servomoteurs à 6.90 € => 82.80 €
1 carte arduino Mega => 29.95€
Soit un montant de = 137.75 € prix moyen
.
![]()
Porte batterie et capot |
.
Ensemble des fichiers à télécharger pour imprimer le capot et le porte batterie
Robot Spider repérage RedOhm
Voici un petit programme pour Arduino permettant de positionner un servomoteur à 90°. Ce positionnement se produit quand on appuie sur le bouton poussoir , tant que celui-ci est sollicité le servomoteur conserve sa position, quand le bouton est relâché le servo est à nouveau libre.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 |
/* * RedOhm * * * Positionne un servomoteur à son centre * donc à 90° * * Le 06/12/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // le bouton est connecté à la broche 2 de la carte Arduino const int bouton=2; // Variable qui enregistre l'état du bouton int etatdubouton; /* * Un programme Arduino doit impérativement contenir cette fonction . * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { //le bouton est une entrée pinMode(bouton,INPUT); //on initialise l'état du bouton comme "relaché" etatdubouton=LOW; } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // lecture de l'etat du bouton etatdubouton=digitalRead(bouton); //test si le bouton a un niveau logique HAUT if (etatdubouton == HIGH) { // associe le servomoteur a la broche 3 monservo.attach(3); // Positionne mon servomteur a 90 monservo.write(90); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } else { // Dissocie la variable monservo de sa broche monservo.detach(); } } |
–
Retour au sommaire![]()
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 |
/* * * * RedOhm * * Initialisation de mini spider * * but : les pattes en bas et droite * enfin un petit bonjour pour nous confirmer * que le robot est en attente * * * Le 28/01/2017 * H-Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> //Crée un objet de type "Servo", nommé -> servo_d1 Servo servo_d1; //Crée un objet de type "Servo", nommé -> servo_d2 Servo servo_d2; //Crée un objet de type "Servo", nommé -> servo_d3 Servo servo_d3; //Crée un objet de type "Servo", nommé -> servo_d4 Servo servo_d4; //Crée un objet de type "Servo", nommé -> servo_d5 Servo servo_d5; //Crée un objet de type "Servo", nommé -> servo_d6 Servo servo_d6; //Crée un objet de type "Servo", nommé -> servo_d7 Servo servo_d7; //Crée un objet de type "Servo", nommé -> servo_d8 Servo servo_d8; //Crée un objet de type "Servo", nommé -> servo_d9 Servo servo_d9; //Crée un objet de type "Servo", nommé -> servo_d10 Servo servo_d10; //Crée un objet de type "Servo", nommé -> servo_d11 Servo servo_d11; //Crée un objet de type "Servo", nommé -> servo_d12 Servo servo_d12; // variable du type int pour les deplacement des servomoteurs // a droite int initd=5; // variable du type int pour les deplacement des servomoteurs // a gauche int initg=5; // variable du type int pour les boucle for int x; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // associe le servomoteur a la broche 2 servo_d1.attach(2,700,2000); // associe le servomoteur a la broche 3 servo_d2.attach(3,700,2000); // associe le servomoteur a la broche 4 servo_d3.attach(4,700,2000); // associe le servomoteur a la broche 5 servo_d4.attach(5,700,2000); // associe le servomoteur a la broche 6 servo_d5.attach(6,700,2000); // associe le servomoteur a la broche 7 servo_d6.attach(7,700,2000); //associe le servomoteur a la broche 8 servo_d7.attach(8,700,2000); //associe le servomoteur a la broche 9 servo_d8.attach(9,700,2000); //associe le servomoteur a la broche 10 servo_d9.attach(10,700,2000); //associe le servomoteur a la broche 11 servo_d10.attach(11,700,2000); //associe le servomoteur a la broche 12 servo_d11.attach(12,700,2000); //associe le servomoteur a la broche 13 servo_d12.attach(13,700,2000); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(500); // lancement d'un petit bonjour servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); delay(200); servo_d1.write (5); delay(500); servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); servo_d1.write (5); } // fin du bonjour //Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { } // Initialisation spider void initialisation() { // position des pattes en bas initd=5; initg=175; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); } |
Retour au sommaire
.
![]()
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 |
/* * * * RedOhm * * Programme enchaînement de divers sous programme * * Initialisation spider * Petit bonjour * Position d'attaque de Spider * Rotation de Spider * * Le 18/02/2017 * H-Mazelin * */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> //Crée un objet de type "Servo", nommé -> servo_d1 Servo servo_d1; //Crée un objet de type "Servo", nommé -> servo_d2 Servo servo_d2; //Crée un objet de type "Servo", nommé -> servo_d3 Servo servo_d3; //Crée un objet de type "Servo", nommé -> servo_d4 Servo servo_d4; //Crée un objet de type "Servo", nommé -> servo_d5 Servo servo_d5; //Crée un objet de type "Servo", nommé -> servo_d6 Servo servo_d6; //Crée un objet de type "Servo", nommé -> servo_d7 Servo servo_d7; //Crée un objet de type "Servo", nommé -> servo_d8 Servo servo_d8; //Crée un objet de type "Servo", nommé -> servo_d9 Servo servo_d9; //Crée un objet de type "Servo", nommé -> servo_d10 Servo servo_d10; //Crée un objet de type "Servo", nommé -> servo_d11 Servo servo_d11; //Crée un objet de type "Servo", nommé -> servo_d12 Servo servo_d12; // variable du type int pour les deplacement des servomoteurs // a droite int initd=5; // variable du type int pour les deplacement des servomoteurs // a gauche int initg=5; // variable du type int pour les boucle for int x; // variable du type int pour le deplacement arriere int arriere =90; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // associe le servomoteur a la broche 2 servo_d1.attach(2,700,2000); // associe le servomoteur a la broche 3 servo_d2.attach(3,700,2000); // associe le servomoteur a la broche 4 servo_d3.attach(4,700,2000); // associe le servomoteur a la broche 5 servo_d4.attach(5,700,2000); // associe le servomoteur a la broche 6 servo_d5.attach(6,700,2000); // associe le servomoteur a la broche 7 servo_d6.attach(7,700,2000); //associe le servomoteur a la broche 8 servo_d7.attach(8,700,2000); //associe le servomoteur a la broche 9 servo_d8.attach(9,700,2000); //associe le servomoteur a la broche 10 servo_d9.attach(10,700,2000); //associe le servomoteur a la broche 11 servo_d10.attach(11,700,2000); //associe le servomoteur a la broche 12 servo_d11.attach(12,700,2000); //associe le servomoteur a la broche 13 servo_d12.attach(13,700,2000); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(1500); } //Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { // appel du sous programme un petit bonjour petit_bonjour(); // temporisation delay(500); // appel du sous programme attaque attaque_spider(); // Appel de la fonction -> initialisation initialisation(); // pause pour le positionnement des servomoteurs delay(500); // temporisation delay(2000); // realisation de 5 pas de rotation for (x=0;x<5;x++){ // appel du sous programme rotation rotation_spider(); delay(300); } } /* * ============================================= * * ensemble de sous programme * * ============================================= */ // Initialisation spider void initialisation() { // position des pattes en bas initd=5; initg=175; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); } //========== sous programme petit bonjour ========== void petit_bonjour() { servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); delay(200); servo_d1.write (5); delay(500); servo_d1.write (175); for (x=0;x<2;x++){ servo_d2.write (30); delay(500); servo_d2.write (150); delay(500); } servo_d2.write (90); servo_d1.write (5); } //==================fin du bonjour ====================== //========= position d'attaque de Spider ================ void attaque_spider() { initd=55; initg=125; servo_d1.write (initd); servo_d9.write (initd); servo_d11.write (initd); servo_d5.write (initg); servo_d3.write (initg); servo_d7.write (initg); // position des pattes au centre servo_d2.write (90); servo_d4.write (90); servo_d6.write (90); servo_d8.write (90); servo_d10.write (90); servo_d12.write (90); delay(1000); servo_d8.write (40); servo_d10.write (140); delay(1000); initd=175; servo_d1.write (initd); servo_d11.write (initd); delay(1000); for (x=0;x<5;x++){ initd=135; servo_d1.write (initd); servo_d11.write (initd); delay(300); initd=175; servo_d1.write (initd); servo_d11.write (initd); delay(300); } } //====== position d'attaque de Spider ======= void rotation_spider() { //===== rotation de spider ================== //patte 1 servo_d1.write (25); delay (200); servo_d2.write (50); delay (200); servo_d1.write (5); delay (200); //patte 2 servo_d11.write (25); delay (200); servo_d12.write (50); delay (200); servo_d11.write (5); delay (200); //patte3 servo_d9.write (25); delay (200); servo_d10.write (50); delay (200); servo_d9.write (5); delay (200); //patte4 servo_d3.write (150); delay (200); servo_d4.write (50); delay (200); servo_d3.write (175); delay (200); //patte 5 servo_d5.write (150); delay (200); servo_d6.write (50); delay (200); servo_d5.write (175); delay (200); //patte6 servo_d7.write (150); delay (200); servo_d8.write (50); delay (200); servo_d7.write (175); delay (200); // position des pattes en arriere arriere=130; // position des pattes au centre servo_d2.write (arriere); servo_d4.write (arriere); servo_d6.write (arriere); servo_d8.write (arriere); servo_d10.write (arriere); servo_d12.write (arriere); delay(500); } //=====Fin de rotation de spider ===================== |
![]()
La série de régulateurs à trois broches LM78XX est disponible dans de nombreuses valeurs de tensions de sortie fixes et est très utile dans nombre d’applications. Bien que conçus pour fournir des tensions de sortie fixes, ces circuits peuvent également délivrer des tensions et courants réglables à l’aide de quelques composants extérieurs
La série LM78XX est disponible en boîtier aluminium TO-220 et peut délivrer jusqu’à 1 A si on utilise un refroidisseur approprié. Ce boîtier possède une limitation en courant interne pour ne pas dépasser les limites de sécurité en courant de pointe. Une plage de sécurité est prévue pour le transistor de sortie permettant de limiter la puissance interne dissipée. Si celle-ci devient trop importante pour le refroidisseur utilisé, le circuit de disjonction thermique est activé pour éviter une surchauffe du circuit intégré.
Mise à jour le 26/02/2017
![]()
Qui est embarrassé, confus, généralement à la suite d’une déconvenue, d’une maladresse ou pour avoir été pris en défaut
Maya oeil penaud droit RedOhm
| Retour au sommaire |
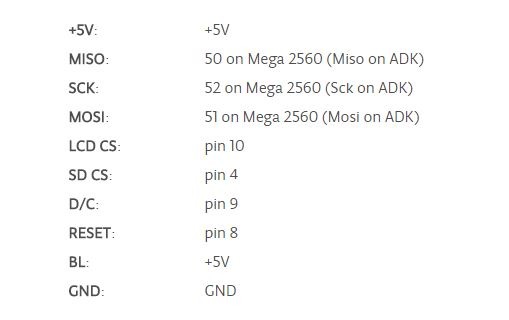
![]()
Ecran couleur LCD TFT 1,77″ Arduino spécialement prévu pour être raccordé sur la carte Arduino Esplora via 2 rangées de connecteurs. Cet afficheur peut également fonctionner avec les cartes UNO, Leonardo, Due, etc.
Le module est équipé d’un port micro-SD, ce qui permet notamment de stocker et afficher des images bitmap et il communique avec la carte Arduino via le port SPI. La librairie contenue dans la version Arduino 1.5.8 beta est nécessaire au bon fonctionnement de cet afficheur.
Alimentation: 5 Vcc
Ecran: 1,77″
Couleurs: 262000
Résolution: 160 x 128 pixels
Port: SPI
Support carte: micro-SD
Température de service: -20 à +70°C
Dimensions: 60 x 42 x 15 mm
Référence fabricant: A000096
Site officiel Arduino: www.arduino.org
| Retour au sommaire |
![]()
Maya : Pour connecter l’écran LCD A000096 – RedOhm
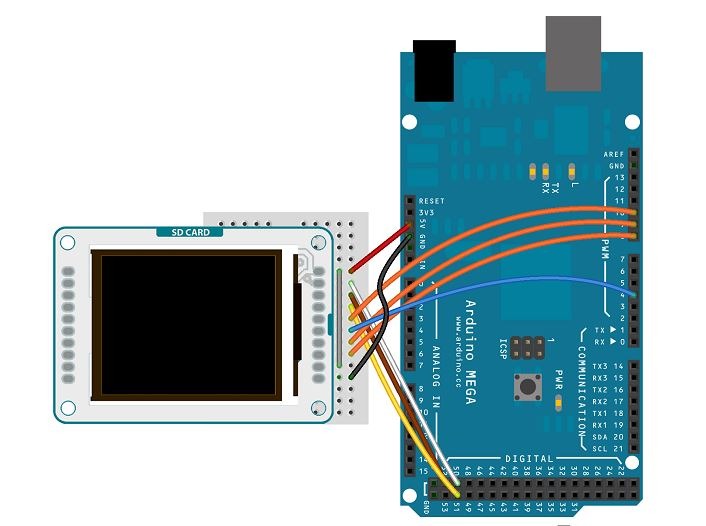
Schéma de raccordement de l’afficheur sur un Arduino 2560 – RedOhm
| Retour au sommaire |
![]()
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 |
/* * * * Creation de l'oeil penaud droit * * * * * code projet : 0000-Oeil_penaud_droit * * Herve Mazelin - RedOhm * 21/01/2017 */ // je charge la librairie SPI // Cette librairie vous permet de communiquer avec des périphériques SPI // La carte Arduino en tant que "maitre" par defaut #include <SPI.h> // je charge la librairie TFT // Cette bibliothèque permet à une carte Arduino de communiquer à // l'écran LCD TFT #include <TFT.h> // Affectation des pins pour la communication Arduino-> afficheur #define cs 10 #define dc 9 #define rst 8 TFT screen = TFT(cs, dc, rst); // variable du type int pour les boucle de creation de l'oeil // Declare la variable X // Rappel sur la fonction d'une variable :On peut définir une variable comme // une boite ou l’on stock des balles .Une variable est une boite ou // l’on stock un nombre ,et comme il existe une multitude de nombres: // Exemple entiers ,décimaux etc …Il faut donc assigner un type à cette // variable . int x; // Un programme Arduino doit impérativement contenir la fonction "setup" // Elle ne sera exécuter une seule fois au démarrage du microcontroleur // Elle sert à configurer globalement les entrées sorties void setup() { // initialisation de l'écran screen.begin(); // Efface l'ecran et met le fond en noir screen.background(0,0,0); //defini la couleur pour tracer l'objet a dessiner screen.stroke(255,255,255); // 1 anneau exterieure bleu // définition de la couleur de remplissage exemple bleu -> 128,255,255 screen.fill(128,255,255); // je dessine un annneau exterieur dans le centre de l'écran // je prend la largeur de l'ecran que je divise par 2 // je prend la hauteur de l'ecran que je divise par 2 screen.circle(screen.width()/2, screen.height()/2, 60); //dessine le trait horizontal et vertical //defini la couleur pour tracer l'objet a dessiner en noir screen.stroke(0,0,0); // Trace trois lignes horizontale qui traverse l'ecran for (x=0;x<3;x++) { screen.line(1,63+x,159,63+x); } // Trace une ligne verticale qui traverse l'ecran d'une epaisseur de // 3 pixels for (x=0;x<3;x++) { screen.line (79+x,1,79+x,127); } // 2 cercle // définit la couleur de remplissage exemple gris 127.127.127 screen.fill(0,0,0); // je dessine un cercle dans le centre de l'écran screen.circle(screen.width()/2, screen.height()/2, 45); // 3 cercle // définit la couleur de remplissage exemple gris 127.127.127 screen.fill(136,136,136); // je dessine un cercle dans le centre de l'écran screen.circle(80, 64, 35); // 4 cercle // définit la couleur de remplissage exemple noir 0.0.0 screen.fill(0,0,0); // je dessine un cercle dans le centre de l'écran screen.circle(screen.width()/2, screen.height()/2, 25); // Dessin de l'oeil penaud ------------------------------ // je dessine un triangle // Boucle comptant de 0 a 80 avec un increment de 1 // for (initialisation ; condition ; increment) // entre crochet { instructions executees dans la boucle } for( x=0;x<80;x++){ // définit la couleur de remplissage exemple noir 255.255.255 screen.fill(255,255,255); // dessine une ligne entre deux points les parametres : // xStart) int, la position horizontale où la ligne commence // ystart) int, la position verticale où la ligne commence // xEnd) int, la position horizontale où la ligne se termine // yEnd) int, la position verticale où les extrémités de la ligne // screen.line (xStart,ystart,xEnd,yEnd); screen.line (0,0,160,x); } // je dessine le 2eme triangle je modifie la position verticale // ou la ligne commence // Boucle comptant de 0 a 20 avec un increment de 1 // for (initialisation ; condition ; increment) // entre crochet { instructions executees dans la boucle } for( x=0;x<20;x++){ // définit la couleur de remplissage exemple noir 255.255.255 screen.fill(255,255,255); // dessine une ligne entre deux points les parametres : // xStart) int, la position horizontale où la ligne commence // ystart) int, la position verticale où la ligne commence // xEnd) int, la position horizontale où la ligne se termine // yEnd) int, la position verticale où les extrémités de la ligne // screen.line (xStart,ystart,xEnd,yEnd); screen.line (0,x,160,79); } } void loop() { // vide pour le besoin de la demonstration } |
| Retour au sommaire |
![]()
Mise à jour le 08/04/2019 : L’ équipe RedOhm a pour objectif de créer un robot semi humanoïde complet . Le robot Maya sera reproductible par tous et une grande partie sera en impression 3D.Retrouvez l’ensemble des articles concernant le projet Maya sur notre site https://www.redohm.fr ou suivez-nous sur notre chaîne YouTube. Continuer la lecture
Mise à jour le 10/10/2016
| Retour au sommaire |
***
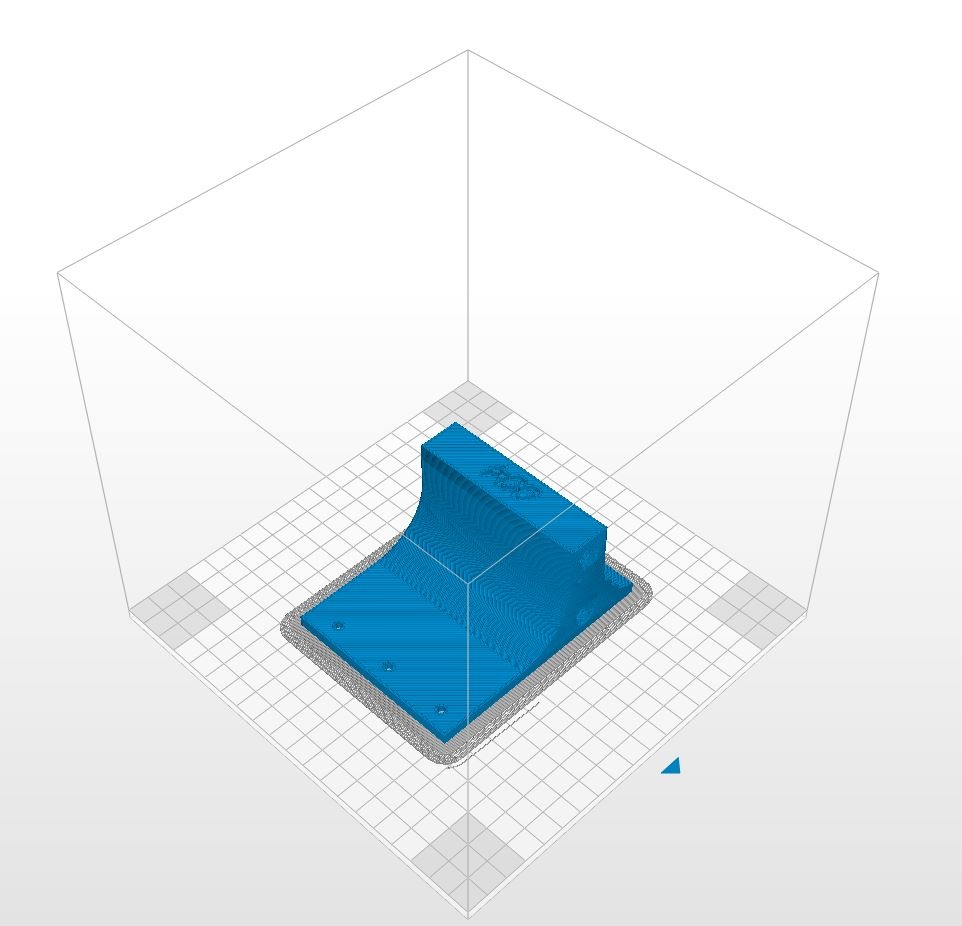
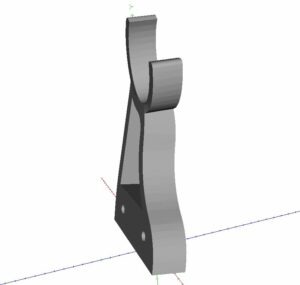
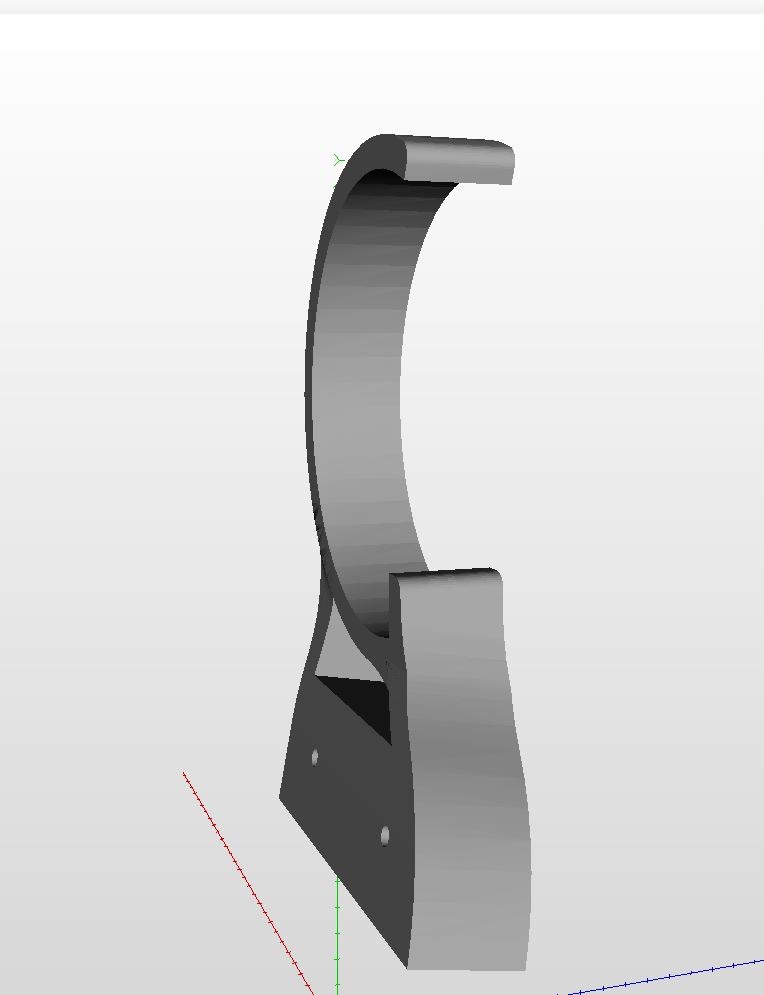
1-Présentation |
Vous avez sur cette page les principaux paramètres pour réaliser le support pour l’avant bras du projet Inmoov entre autre, la température , la qualité d’impression ainsi que le poids de la matière et le temps pour réaliser votre pièce .L’ensemble de ces paramètres est applicable pour l’imprimante Replicator 2 (il suffira d’adapter ces paramètres pour un autre type d’imprimante 3D ) .
Pour ses impressions nous avons utilisé du fil PLA 1.75 de chez Verbatim. Voir La liste pour les imprimantes compatibles . Voici le lien -> Verbatim imprimante
| Retour au sommaire |
***
2-Fichier pour l’impression 3D |
Patte pour support bras Inmoov
Remplissage de : 50%
Temps d’impression : 8h54mm
Matière : PLA noir conseiller 156.69g (0.3450lb)
Paramètre imprimante 3D
Résolution : 0.2mm
Température : 210 degrés
Raft : oui
Support : oui
| Retour au sommaire |
Remplissage de : 50%
Temps d’impression : 7h12mm
Matière : PLA noir conseiller 122.59g (0.27lb)
Paramètre imprimante 3D
Résolution : 0.2mm
Température : 210 degrés
Raft : oui
Support : oui
| Retour au sommaire |
![]()
Remplissage de : 30%
Temps d’impression : 1h25mm
Matière : PLA noir conseiller 22,64g (0.05lb)
Paramètre imprimante 3D
Résolution : 0.2mm
Température : 210 degrés
Raft : oui
Support : oui
| Retour au sommaire |
***
3- Tableau récapitulatif pour l’impression 3D |
| Référence de la pièce | Temps d’impression | Poids en Gramme | Poids en lb |
| Support pied haut | 8h54mm | 156.69g | 0.3450lb |
| Support pied bas | 7h12mm | 122.59g | 0.27lb |
| Logo | 1h25mm | 22,64g | 0.05lb |
| Total -> | 15h31mm | 301.92g | 0.665Ib |
| Retour au sommaire |
***
4- Liste de l’ensemble des pièces |
| Quantités | Désignation |
| 1 | Support pied haut |
| 1 | Support pied bas |
| 1 | Logo |
| 2 | Tube en aluminium diamètre 8 longueur 40 cm |
| 2 | Tige filetée diamètre 6 |
| 4 | Écrou borgne |
| Retour au sommaire |
***
5- Montage de l’ensemble des pièces |

06102016 – Vue de l’ensemble des pièces

06102016 – Montage des 2 entretoises sur le pied bas – RedOhm

06102016 – Assemblage avec le pied haut – RedOhm

06102016 – Montage des tiges filetées – RedOhm

06102016 – Montage des ecrous borgne de 6mm – RedOhm

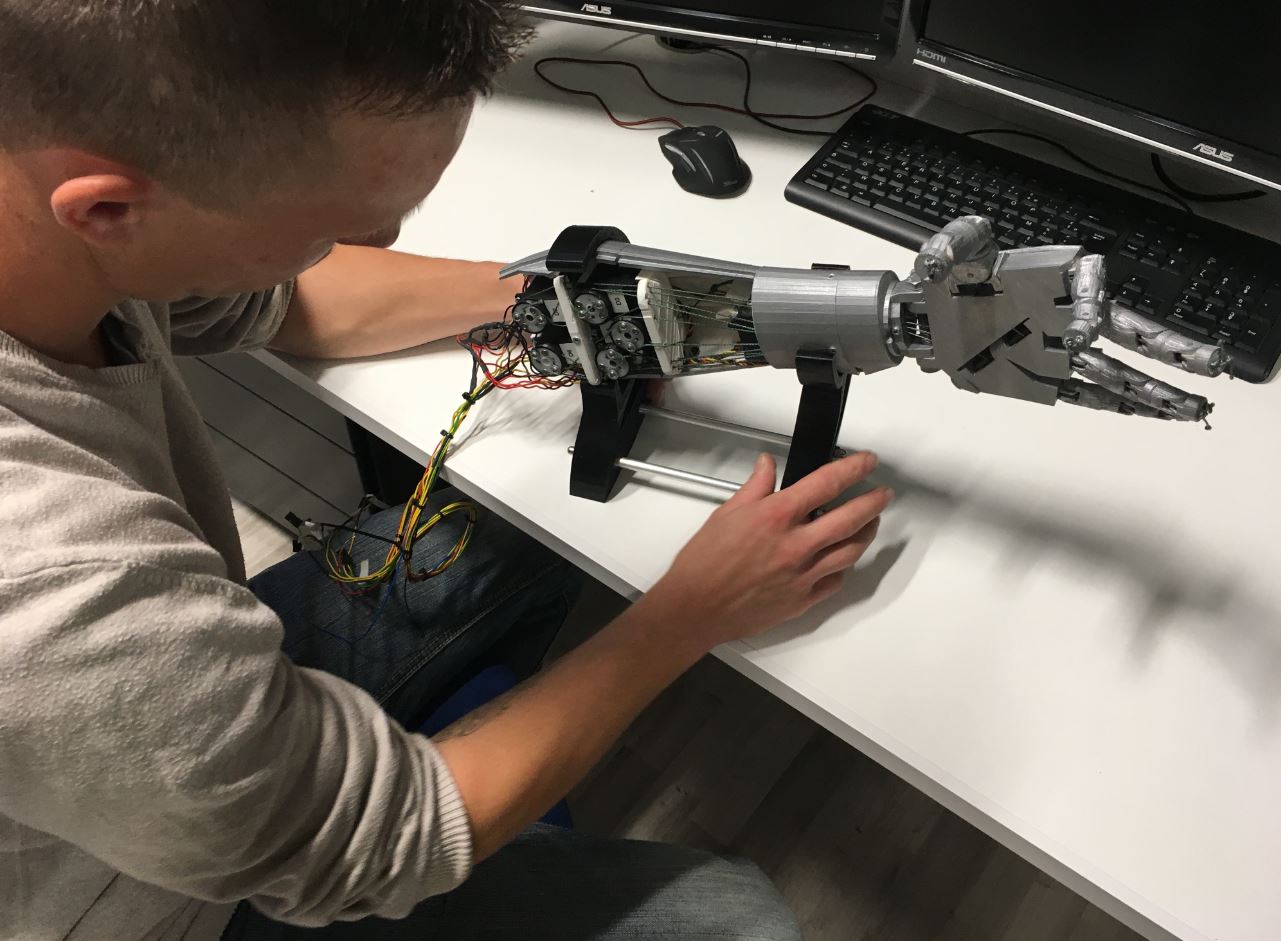
Le bras Inmoov dans son support – RedOhm
| Retour au sommaire |
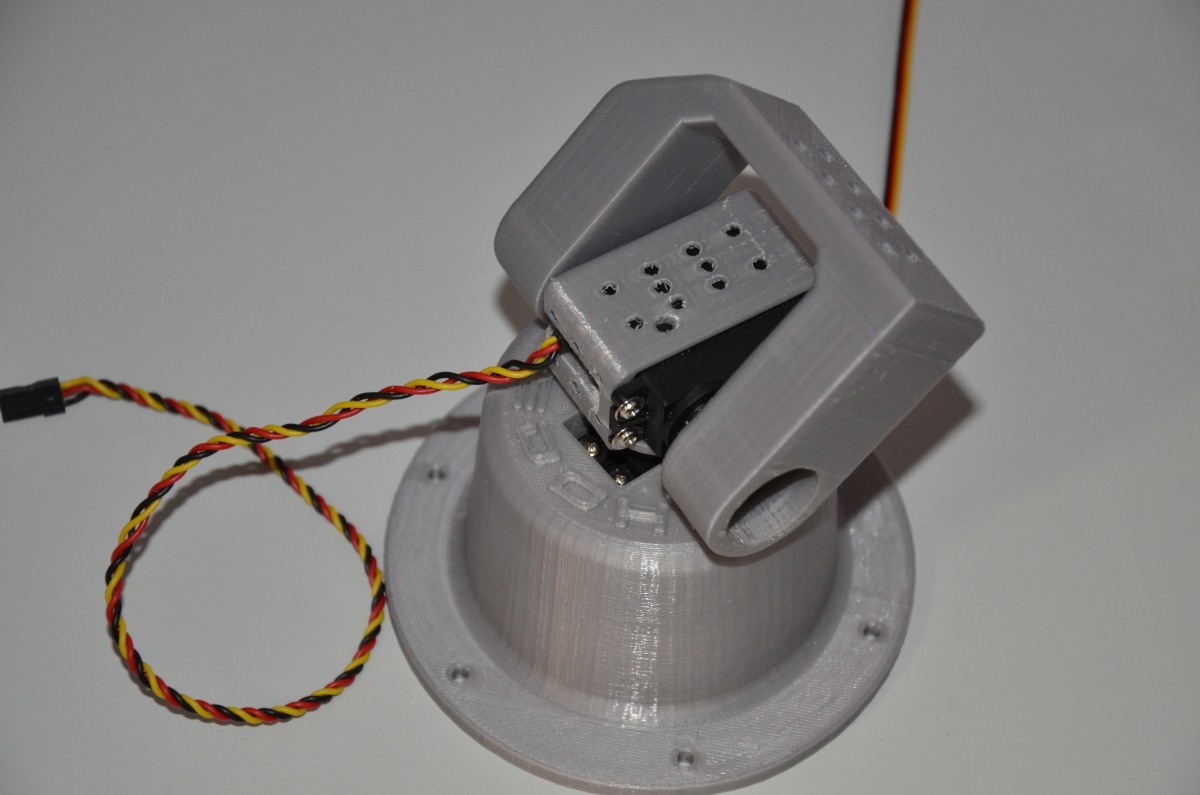
![]()
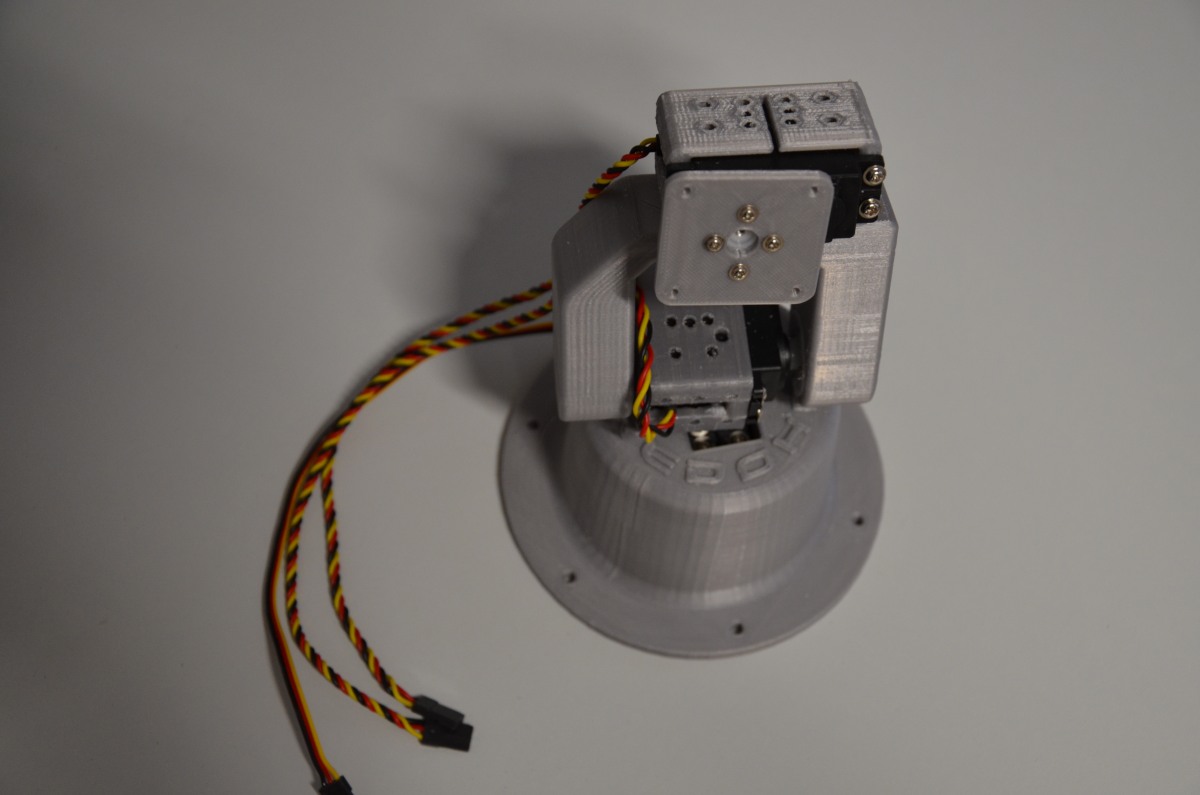
Mise à jour le 20/09/2019 : C’est un support trois axes qui pourrait utiliser pour différentes réalisations. L’ensemble de ce projet a été réalisé pour que certaines pièces comme les cages des servomoteurs soient réutilisé dans d’autres applications.
Sommaire :
![]()
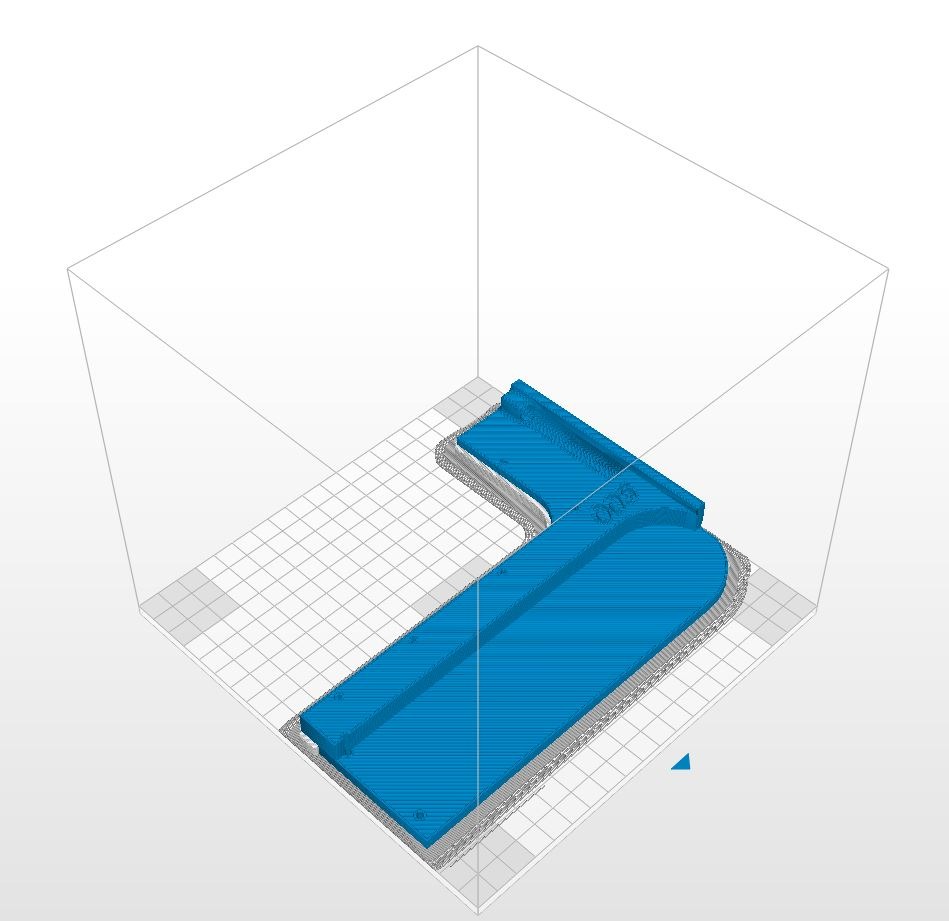
Présentation du projet . |
Vue
C’est un support trois axes qui pourrait utiliser pour différentes réalisations. L’ensemble de ce projet a été réalisé pour que certaines pièces comme les cages des servomoteurs soient réutilisé dans d’autres applications.
Retour au sommaire.
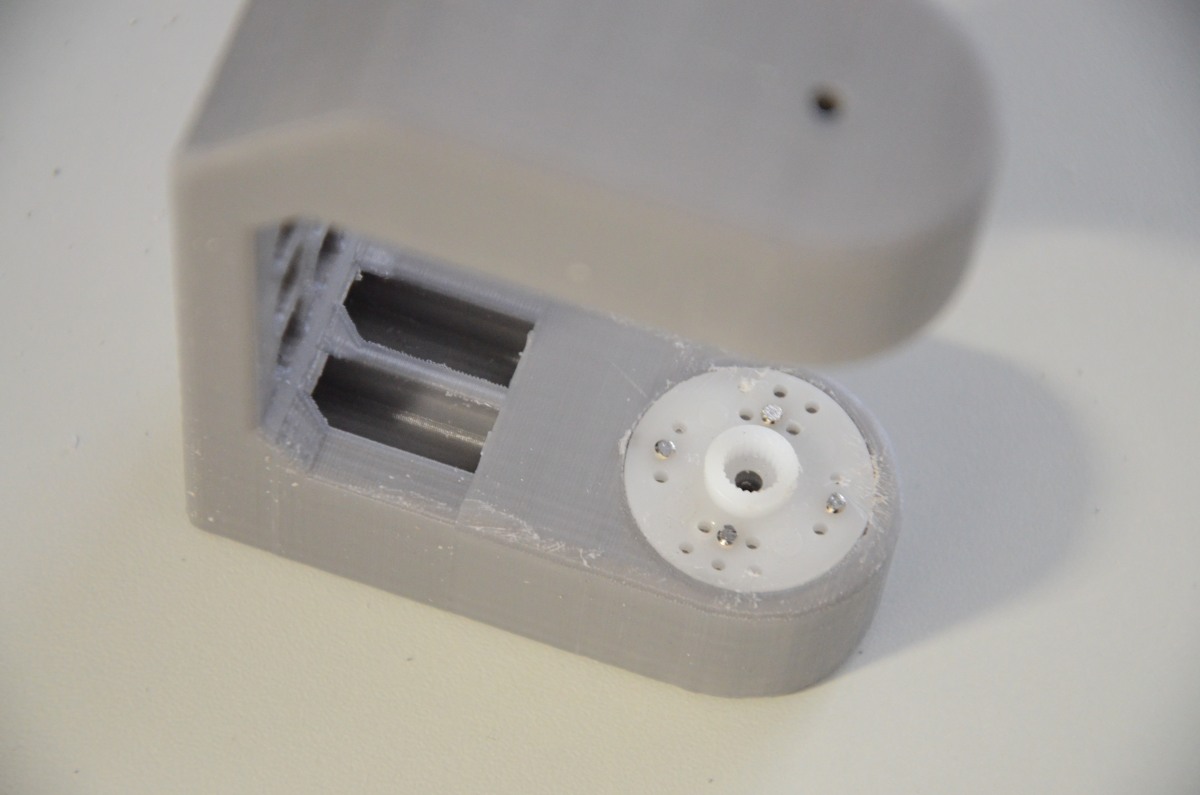
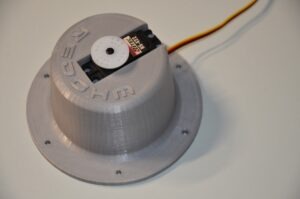
![]()
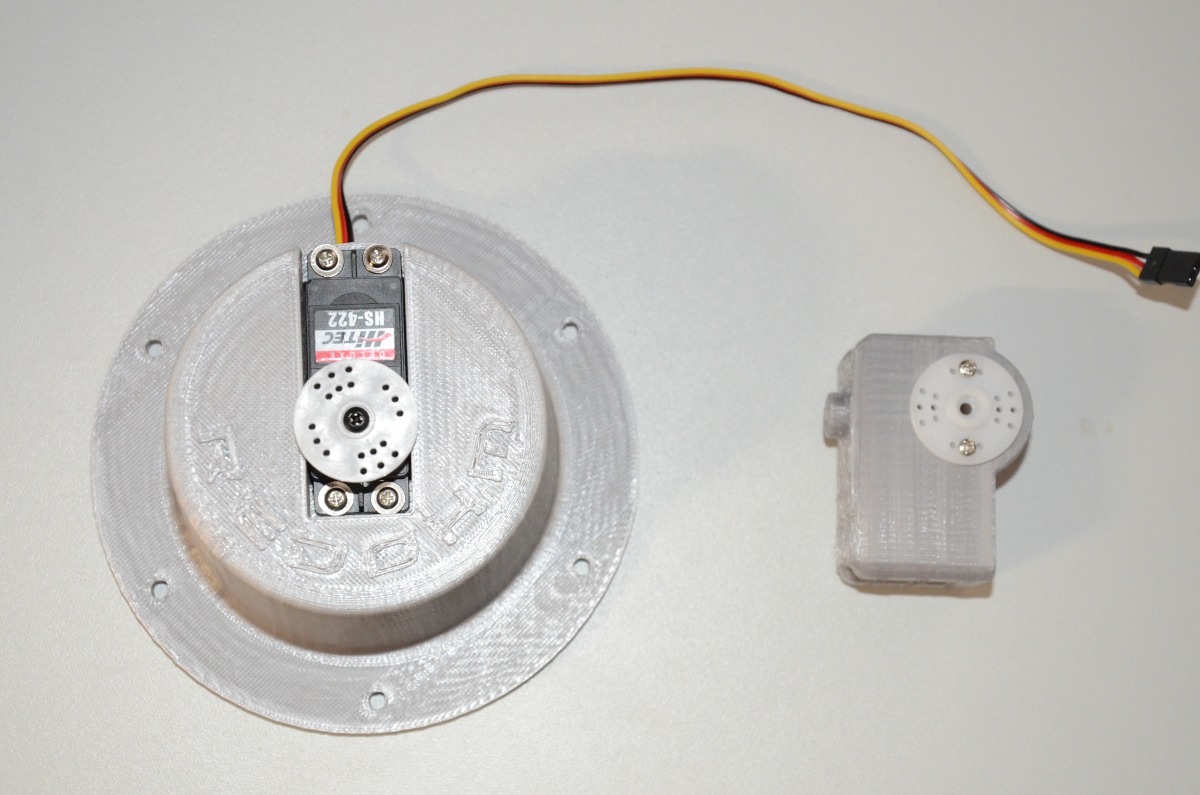
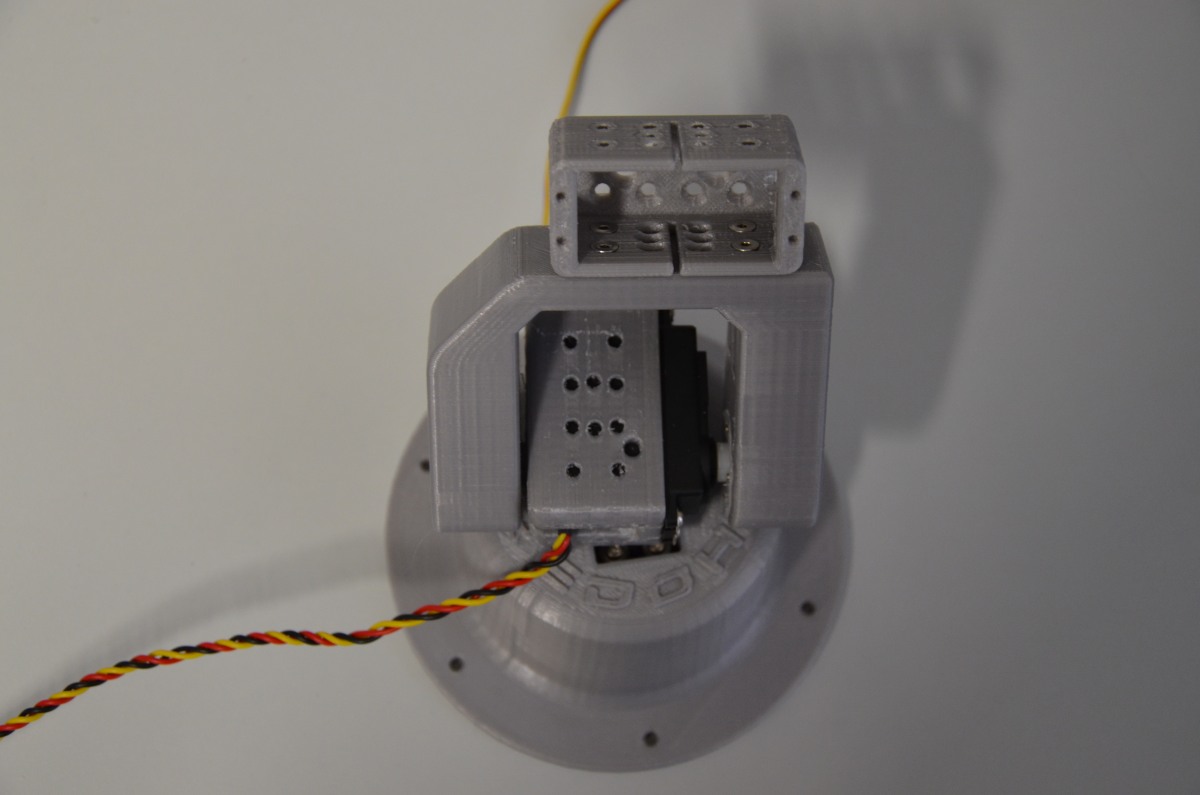
Nous pouvons aussi utiliser le servomoteur Hitec HS-645 MG en sachant que les 2 servo ne possèdent pas le même couple . Nous avons un couple de 4.7kg.cm pour le HS-422 et de 9.6kg.cm pour le HS-645 MG .
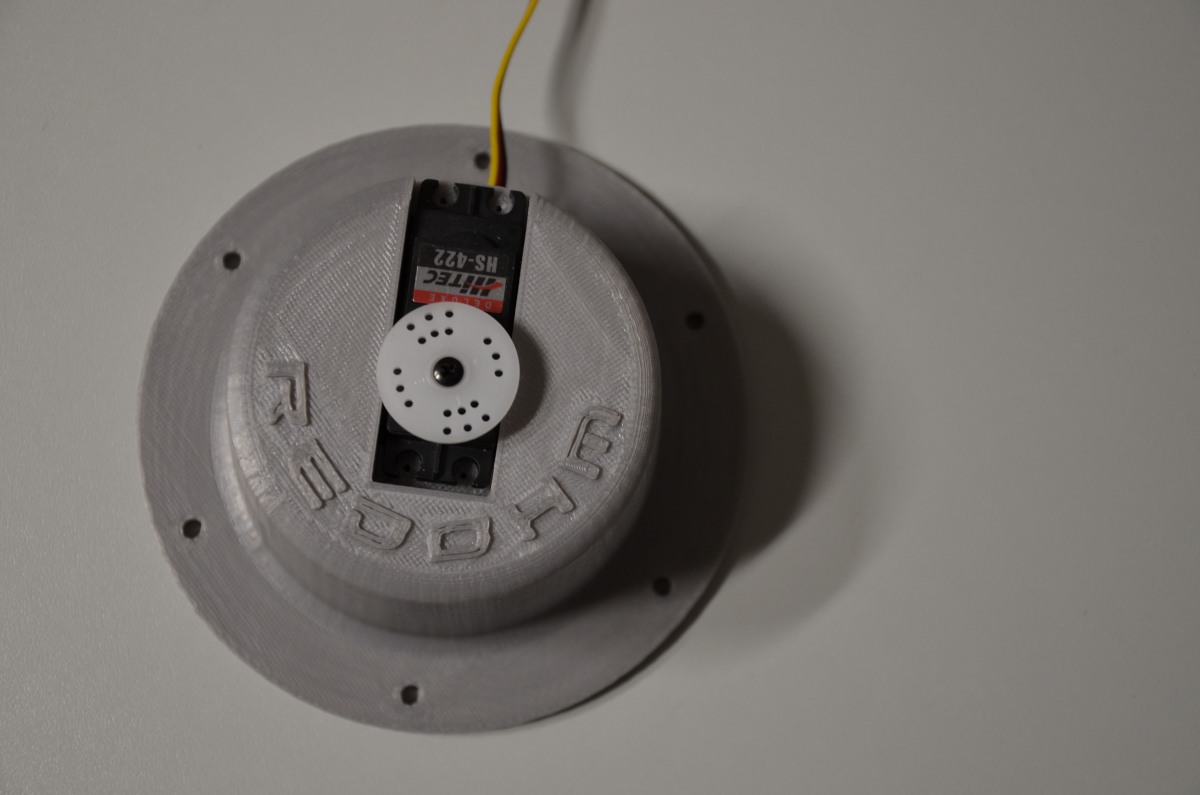
Montage du servomoteur HS-422 dans sa base
Montage du servomoteur HS-422 dans sa base (fig 2)
Montage du servomoteur HS-422 dans sa base (fig 3)
| Retour au sommaire |
RedOhm : Montage du palonnier
| Retour au sommaire |
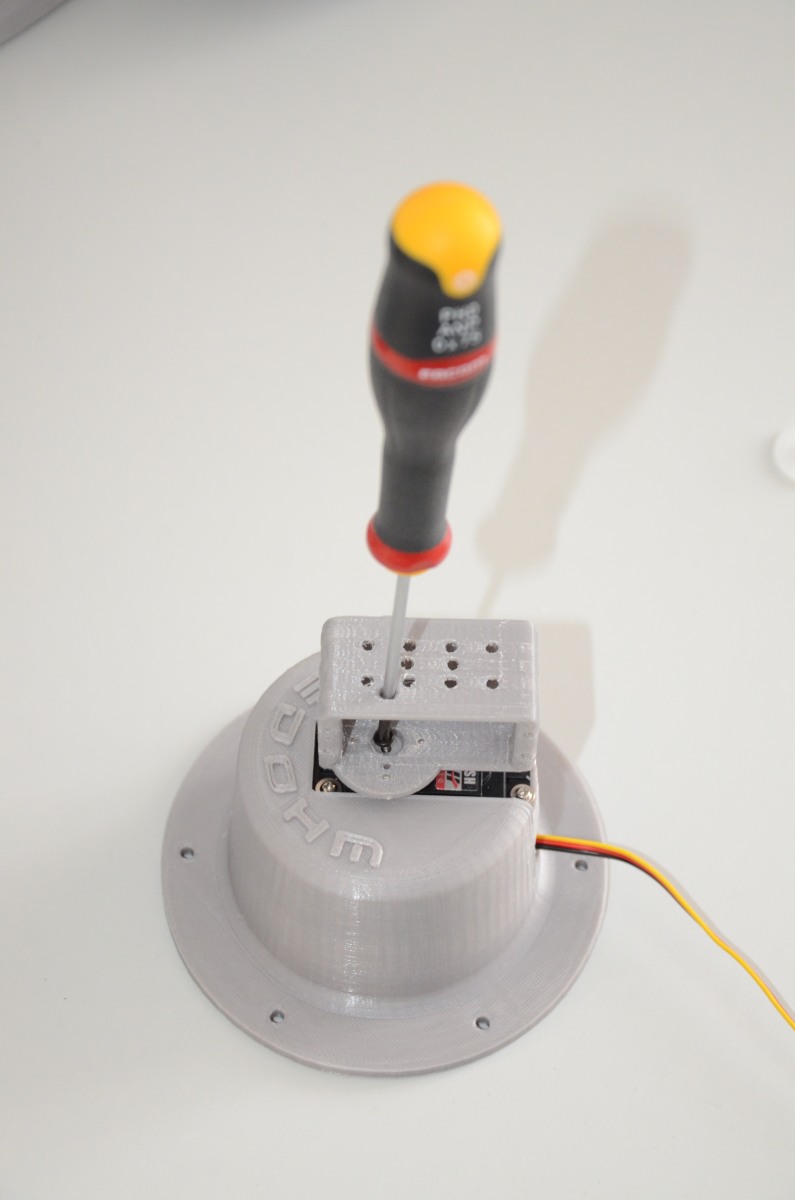
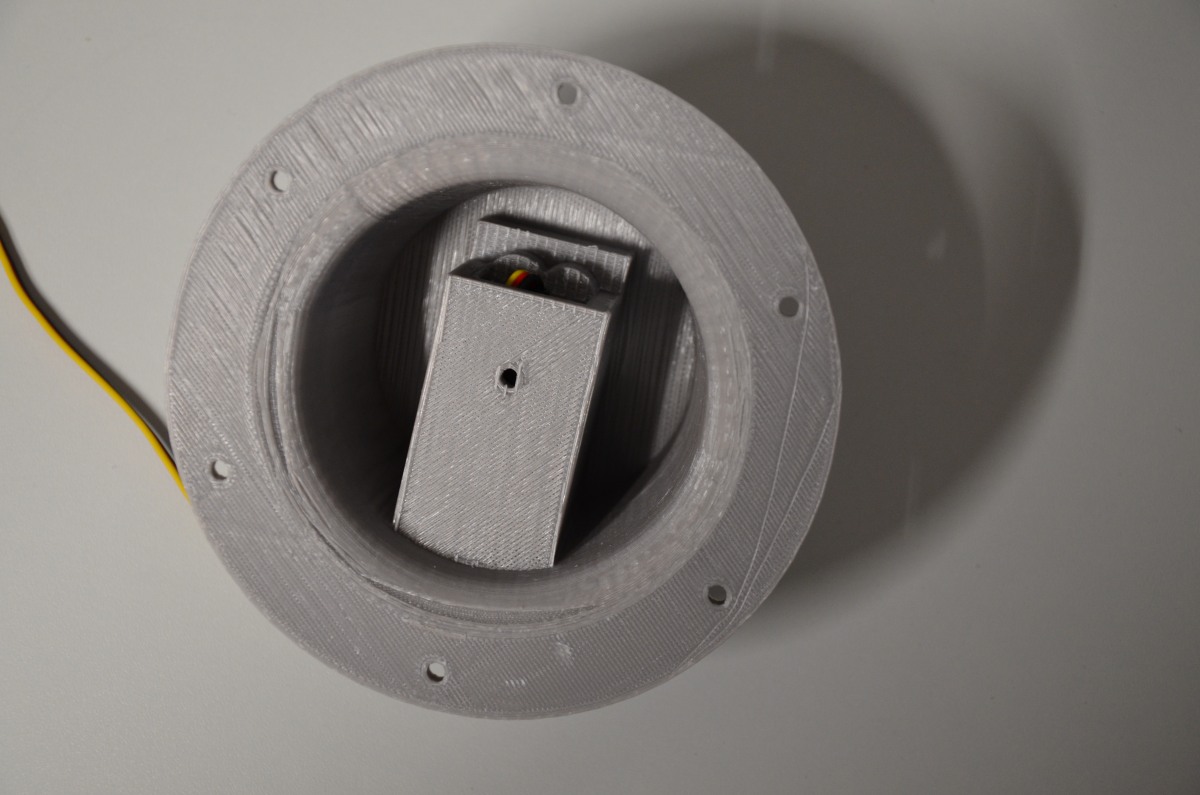
Redohm : On passe un petit tournevis dans l’orifice de la cage porte servo prévu pour ce type de montage
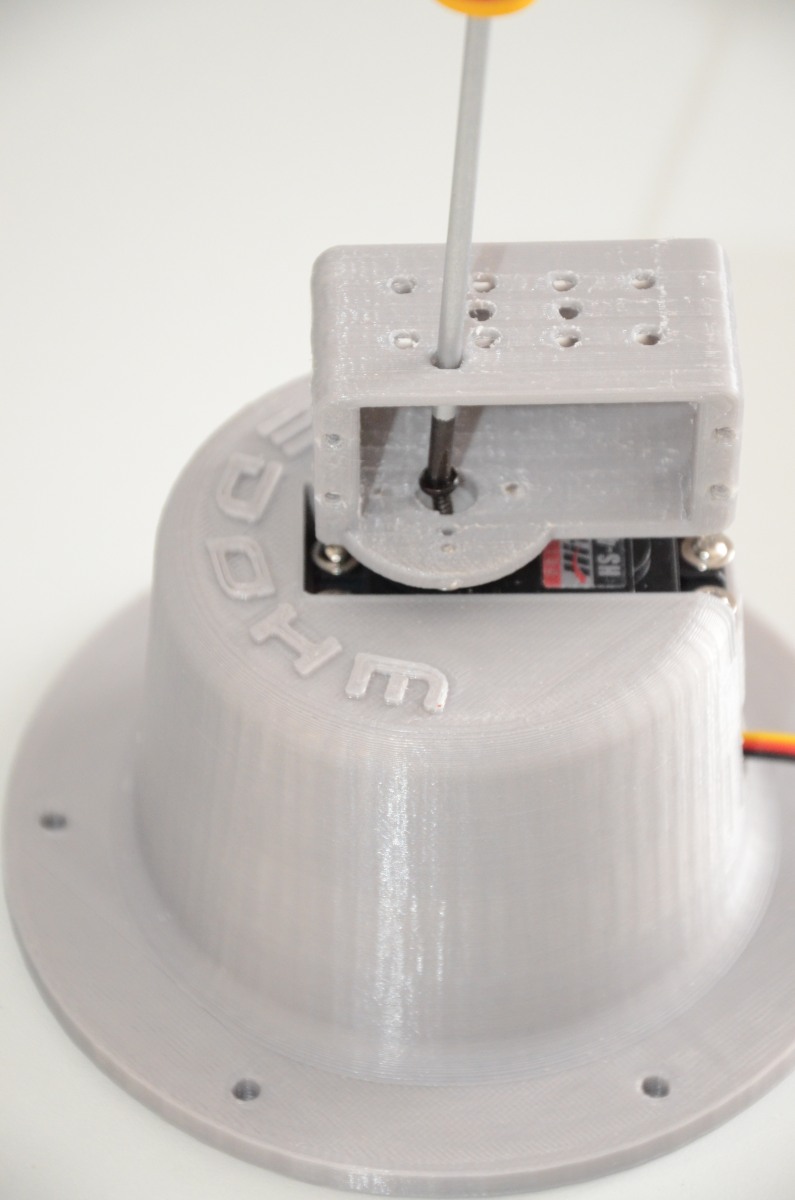
Redohm : Vue en gros plan
| Retour au sommaire |

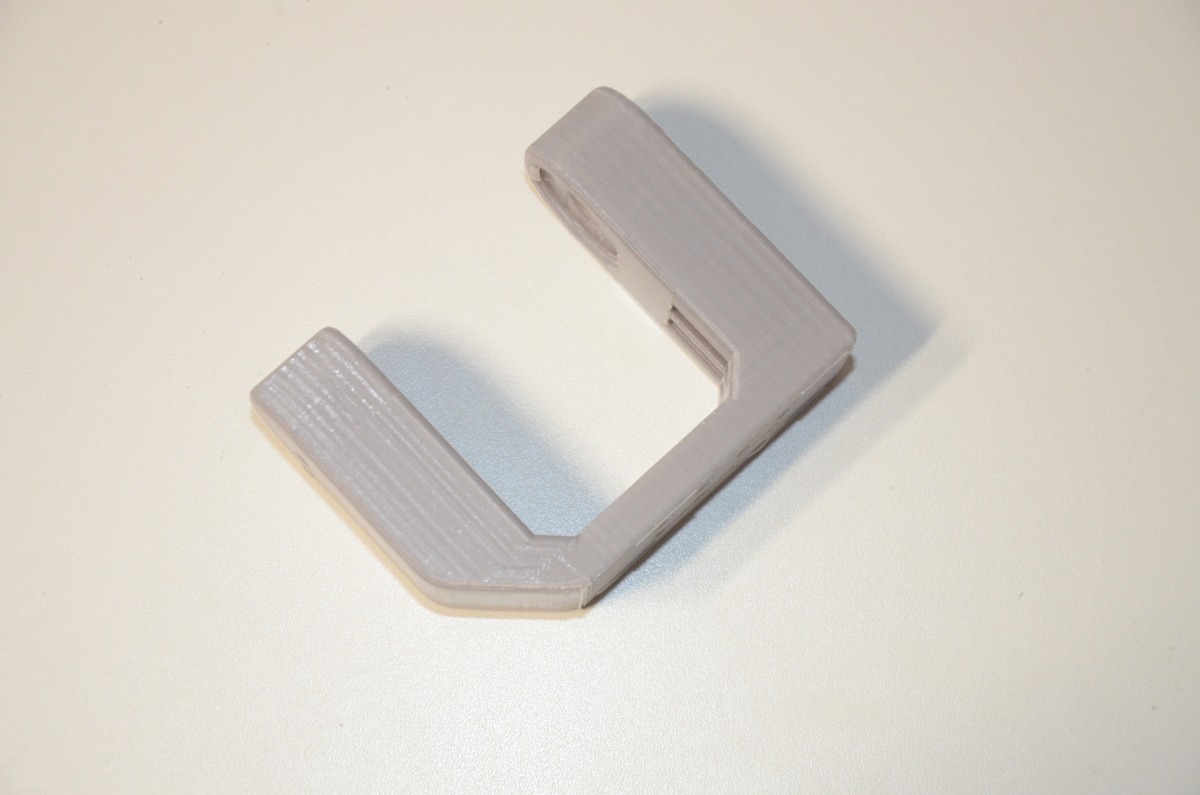
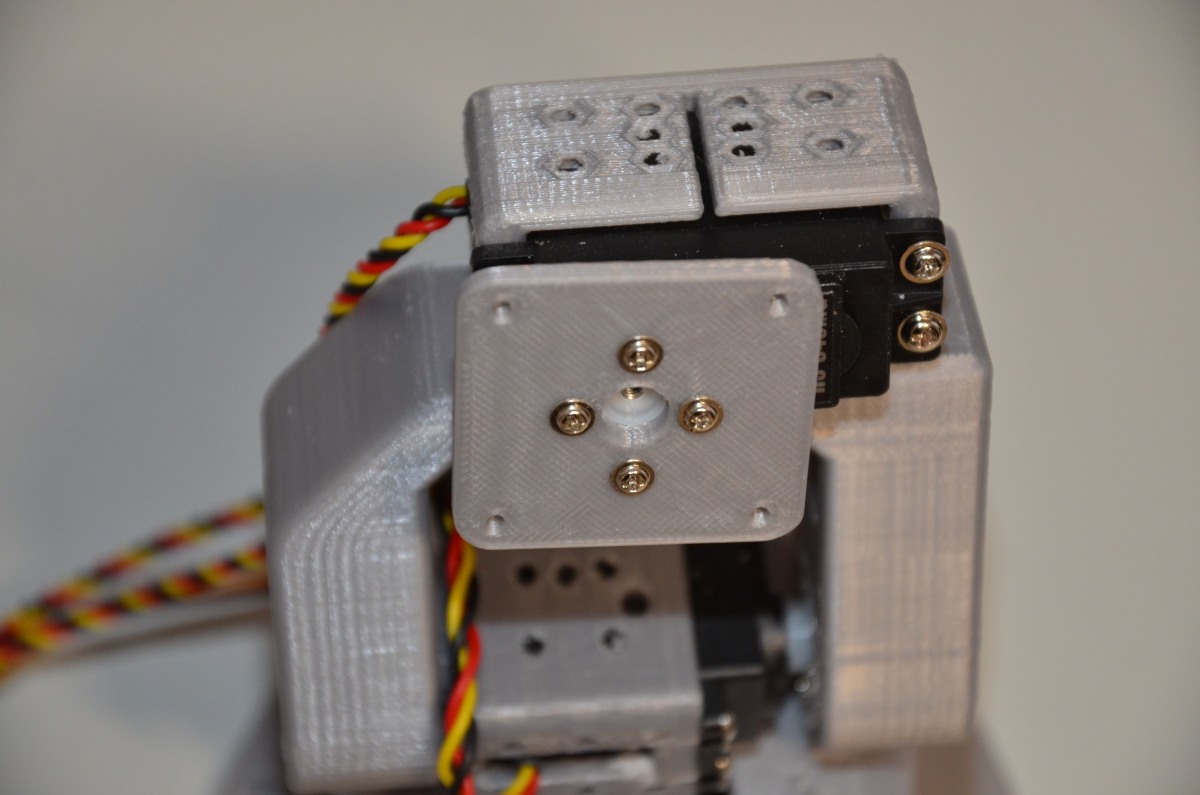
Redohm : Montage du servo porte bras
| Retour au sommaire |
Redohm : Vue du bras fig.10

Redohm : Vue du bras fig.11
RedOhm : Montage du palonnier fig.20
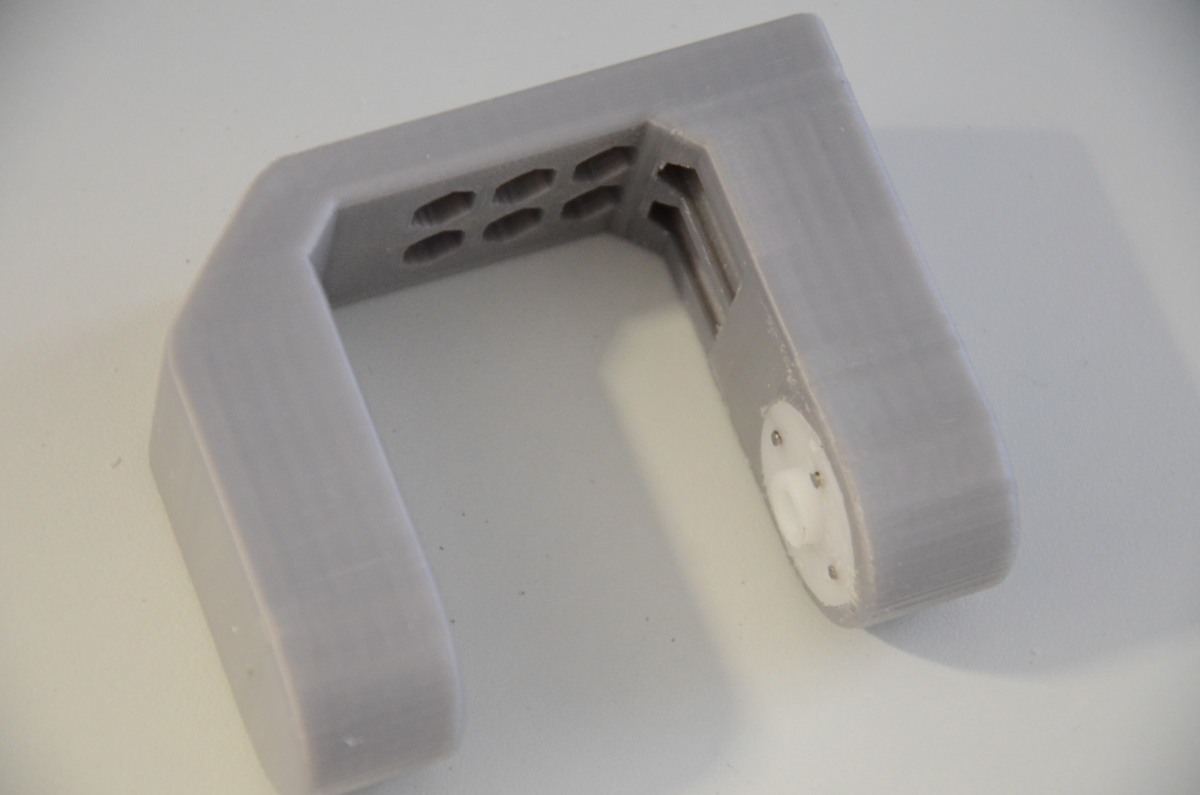
RedOhm : Montage du palonnier fig.21
Redohm: Montage de l’ensemble fig.22
Redohm:Vue d’ensemble fig.23
| Retour au sommaire |
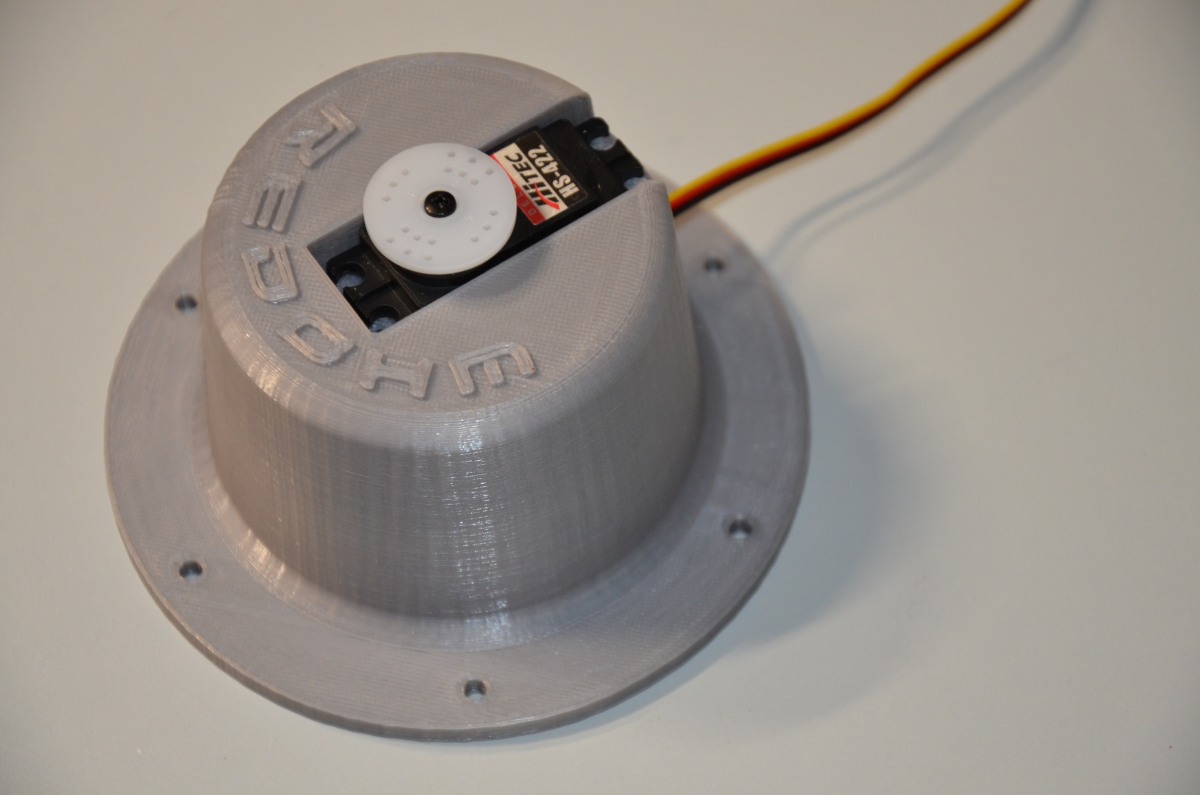
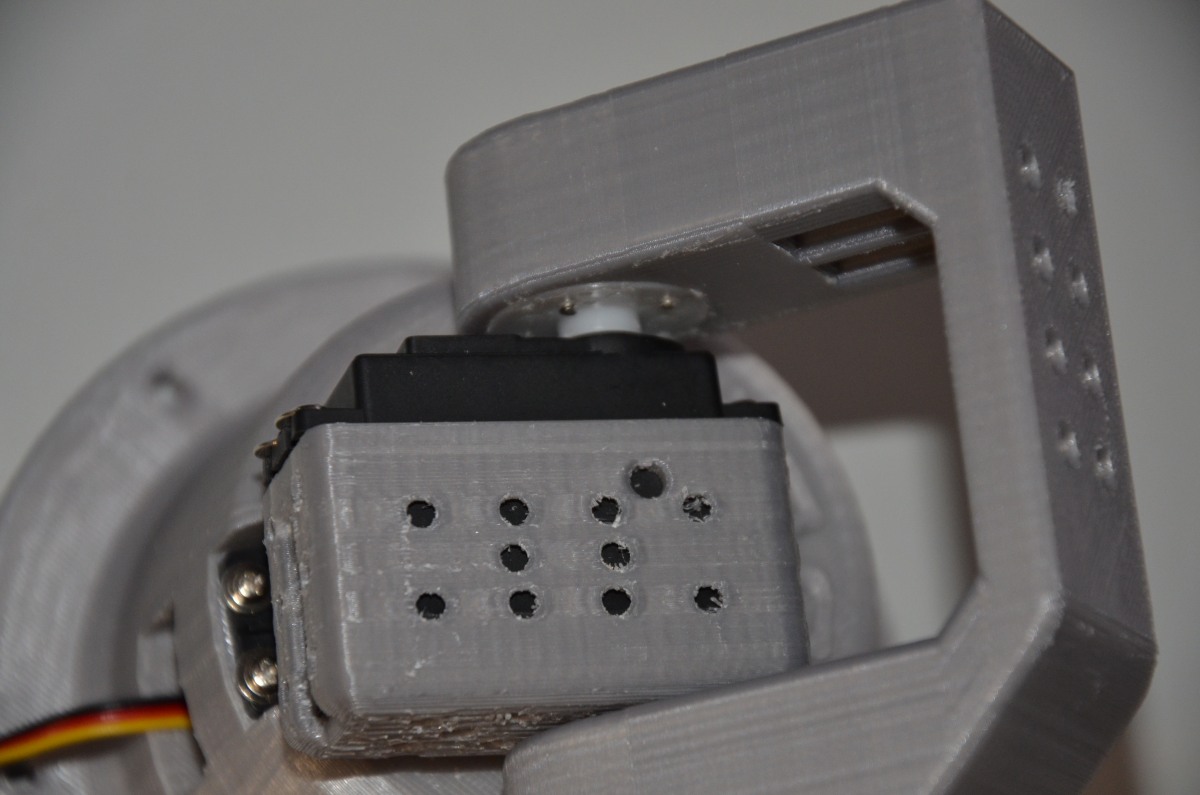
Redohm:Support haut fig.60
Redohm: Support servomoteur superieur fig.61
Redohm : Vue d’ensemble fig.62
Redohm : Vue d’ensemble avec servomoteur et support fig.63
Redohm : Vue d’ensemble avec servomoteur et support fig.64
| Retour au sommaire |
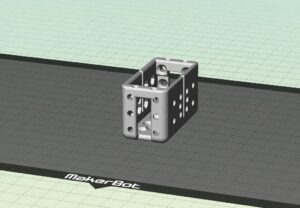
![]()
Ensemble des fichiers pour l’impression 3D. |
Piece 001 : Base pour support 3 axes
.
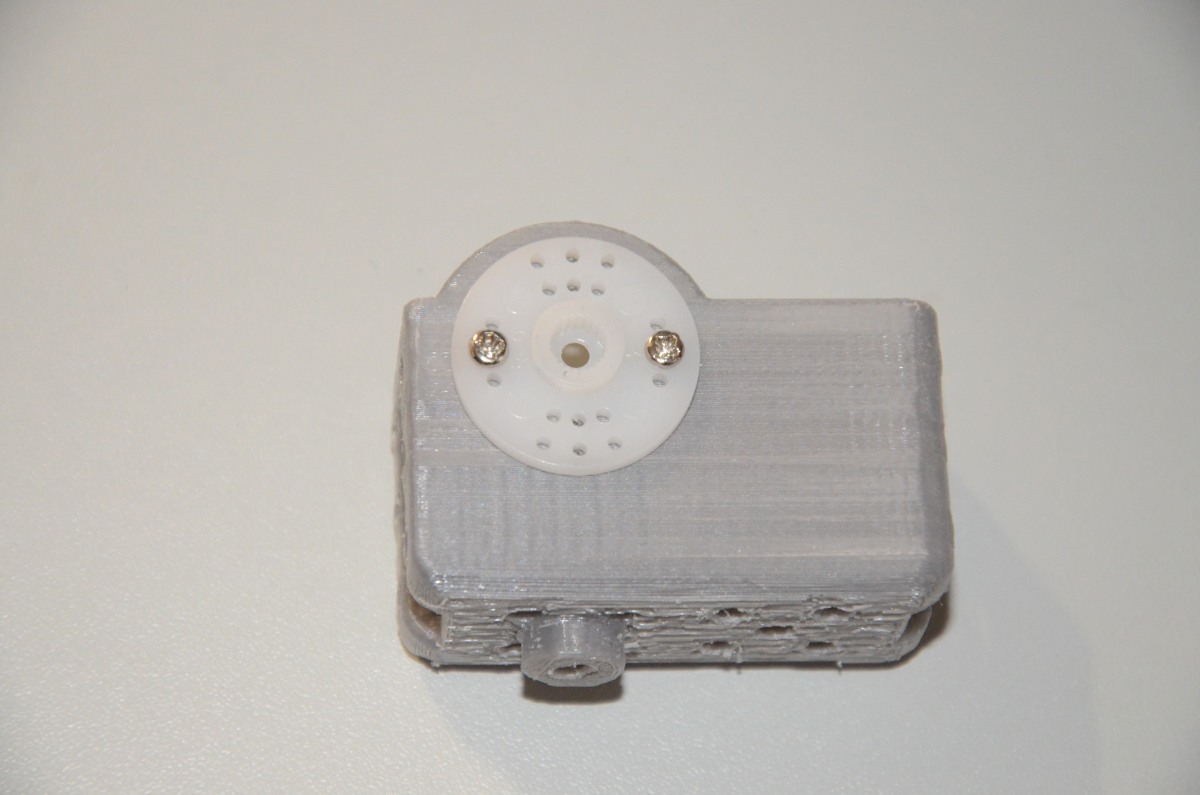
![]()

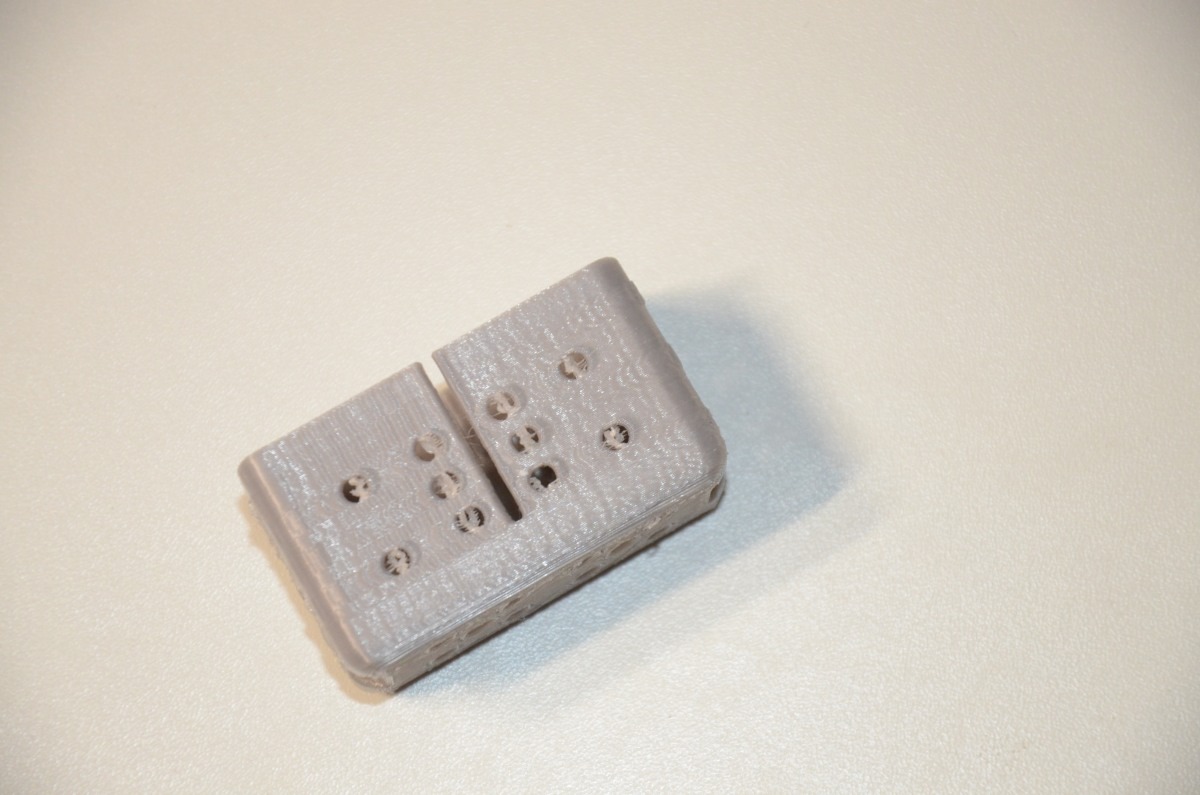
Piece 002 : Cage support servomoteur partie bras
.
Temps d’impression pour un remplissage de 30% ⇒ 1h17mm.
Matière : PLA 16.62g (0.037lb)
Résolution : 0.2mm
.
![]()

Bras pour support 3 axes
Temps d’impression pour un remplissage de 30% ⇒ 2h57mm
Matière : PLA 46.54g (0.103lb)
Résolution : 0.2mm
.
Télechargement de : Pieces 003-Bras pour support 3 axes Retour au sommaire
.
![]()
Piece 004 – Cage pour servomoteur partie haute
.
Temps d’impression pour un remplissage de 30% ⇒ 1h06mm
Matière : PLA 14.43g (0.023lb)
Résolution : 0.2mm
.
Télechargement de : Piece 004-Cage servomoteur partie haute.
Retour au sommaire![]()
Piece 005- Support supérieure fig 005.1
.
Temps d’impression pour un remplissage de 30% ⇒ 00h21mm
Matière : PLA 6.64g (0.015lb)
Résolution : 0.2mm
.
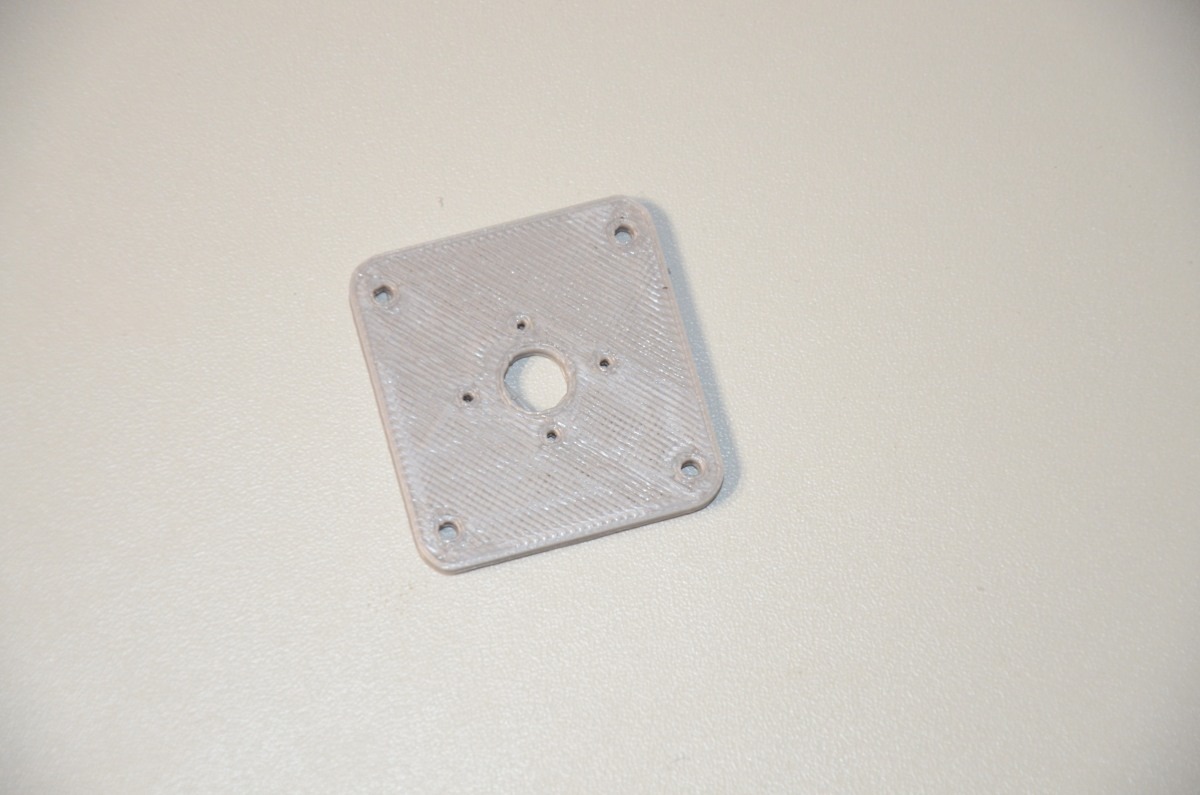
Télechargement de : Piece 005-Support supérieure.
Retour au sommaire![]()
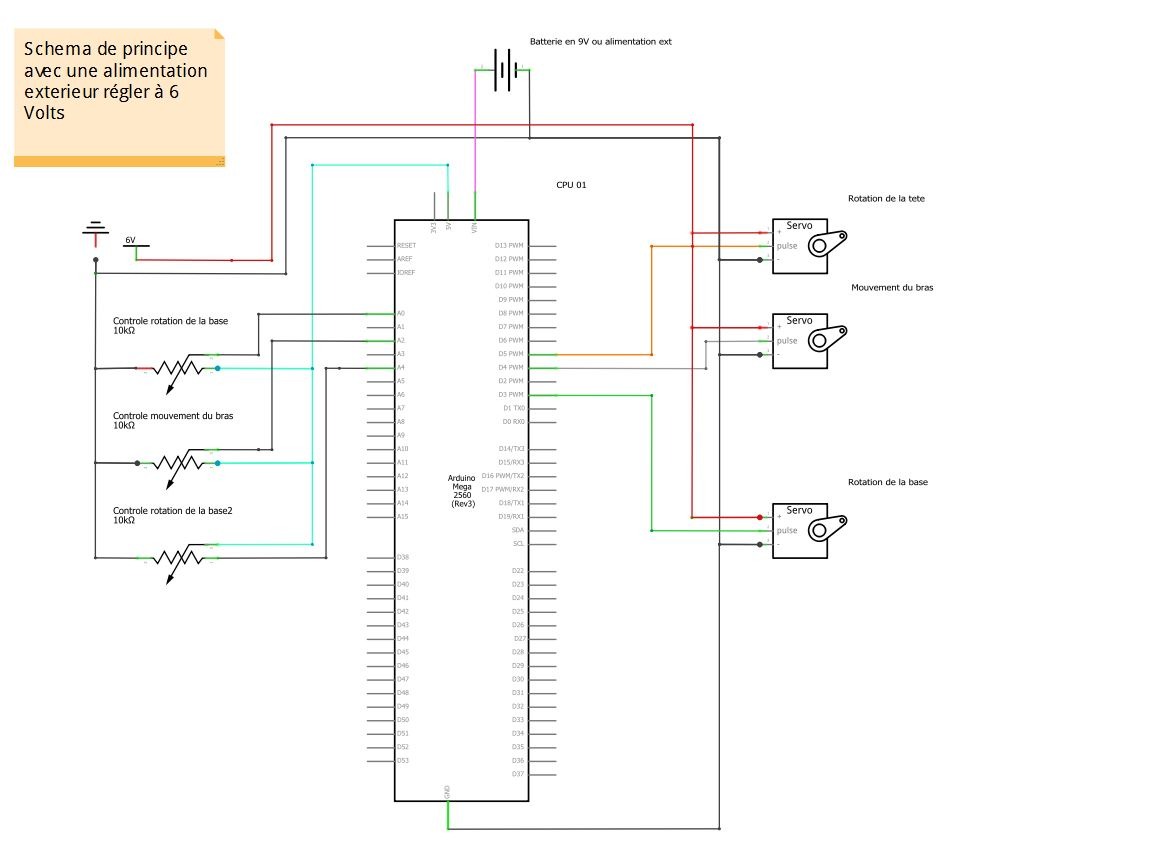
Programme pour tester les limites mini et maxi du support 3 axes |
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 |
// // // /* * RedOhm * * * Essai et reglage des servomoteurs a l'aide * d'un potentiometre en vue de determiner les * limites min et max * * Le 27/08/2016 * H.Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo", nommé -> monservo Servo monservo; // broche sur lequel est branche le potentiometre int brochepotar_de_position=2; // variable contenant la valeur de la potentiometre int valeur_potar_position; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { Serial.begin(9600); // associe le servomoteur a la broche 3 monservo.attach(3); } /* *Le programme principal s’exécute par une boucle infinie appelée Loop () * */ void loop() { // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position=analogRead( brochepotar_de_position); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position=map(valeur_potar_position,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle monservo.write(valeur_potar_position); Serial.println(valeur_potar_position); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } |
.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 |
/* * * * *RedOhm * * *Programme pour piloter separement chaque moteur du support *trois axes * *le 27/08/2016 * H-Mazelin */ // Cette librairie permet à une carte Arduino de contrôler des servomoteurs #include <Servo.h> // Crée un objet de type "Servo" pour la rotation de la base, nommé -> servobase Servo servobase; // Crée un objet de type "Servo" pour l'elevation du bras, nommé -> servobras Servo servobras; // Crée un objet de type "Servo" pour la rotation de la tete, nommé -> servotete Servo servotete; // broche sur lequel est branche le potentiometre servant a piloter le servobase int brochepotar_de_position_servobase=0; // variable contenant la valeur du potentiometre pour le servobase int valeur_potar_position_du_servobase; // broche sur lequel est branche le potentiometre servant a piloter le servobras int brochepotar_de_position_servobras=2; // variable contenant la valeur du potentiometre pour le servobras int valeur_potar_position_du_servobras; // broche sur lequel est branche le potentiometre servant a piloter le servotete int brochepotar_de_position_servotete=4; // variable contenant la valeur du potentiometre pour le servotete int valeur_potar_position_du_servotete; /* * Un programme Arduino doit impérativement contenir cette fonction * Elle ne sera exécuter une seule fois au démarrage du microcontroleur * Elle sert à configurer globalement les entrées sorties * */ void setup() { // initialisation de la connexion série // IMPORTANT : la fenêtre terminal côté PC doit être réglée sur la même valeur Serial.begin(9600); // associe le servomoteur servobase a la broche 3 servobase.attach(3); // associe le servomoteur servobras a la broche 4 servobras.attach(4); // associe le servomoteur servotete a la broche 5 servotete.attach(5); Serial.println("**********************************"); Serial.println("* *"); Serial.println("*support 3 axes *"); Serial.println("* operationnel *"); Serial.println("* *"); Serial.println("**********************************"); Serial.println(" "); //pause presentation delay (5000); } // Le programme principal s’exécute par une boucle infinie appelée Loop () void loop() { /* * * traitement pour la position de la base */ // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position_du_servobase=analogRead( brochepotar_de_position_servobase); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_du_servobase=map(valeur_potar_position_du_servobase,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servobase.write(valeur_potar_position_du_servobase); // affiche le texte d'information sans retour a la ligne Serial.print("position actuelle de la base -> "); // affiche la valeur de la position de la base avec retour a la ligne Serial.println(valeur_potar_position_du_servobase); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); /* * * traitement pour la position du bras */ // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position_du_servobras=analogRead(brochepotar_de_position_servobras); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_du_servobras=map(valeur_potar_position_du_servobras,0,1023,54,120); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servobras.write(valeur_potar_position_du_servobras); // affiche le texte d'information sans retour a la ligne Serial.print("position actuelle du bras -> "); // affiche la valeur de la position du bras avec retour a la ligne Serial.println(valeur_potar_position_du_servobras); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); /* * * traitement pour la position de la tete */ // lecture de la valeur du potentiomètre (valeur entre 0 et 1023) valeur_potar_position_du_servotete=analogRead(brochepotar_de_position_servotete); // mise a l'échelle (valeur entre 5 et 180) // Ré-étalonne un nombre d'une fourchette de valeur vers une autre fourchette. // Ainsi, une valeur basse source sera étalonnée en une valeur basse de destination valeur_potar_position_du_servotete=map( valeur_potar_position_du_servotete,0,1023,5,180); // définit la position d'asservissement du servomoteur // en fonction de la valeur à l'échelle servotete.write( valeur_potar_position_du_servotete); // affiche le texte d'information sans retour a la ligne Serial.print("position actuelle de la tete -> "); // affiche la valeur de la position de la tete avec retour a la ligne Serial.println( valeur_potar_position_du_servotete); // Réalise une pause dans l'exécution du programme pour une durée // de 20 millisecondes // permettant au servomteur d'atteindre sa position delay(20); } |
| Retour au sommaire |
![]()